
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 3.2.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-12-02 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
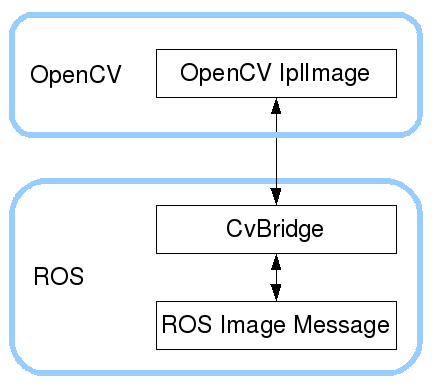
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.2.1 (2022-09-21)
- silence dperecation warnings using boost macros (#492)
- Contributors: Kenji Brameld
3.2.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#483)
- Fix 16U encoding type (#463)
- Reorganize author tag (#469)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 4.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2025-12-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
4.1.0 (2024-04-19)
4.0.0 (2024-04-13)
- Decode images in mode IMREAD_UNCHANGED (#520)
- Remove header files that were deprecated in I-turtle (#517)
- Fixed converstion for 32FC1 (#514)
- Allow users to override encoding string in ROSCvMatContainer (#505)
- Ensure dynamic scaling works when given matrix with inf, -inf and nan values. (#498)
- Add new CMake option CV_BRIDGE_DISABLE_PYTHON to cv_bridge to disable building Python support if desired (#494)
- Contributors: Alejandro Hernández Cordero, Christian Rauch, Kenji Brameld, Lightech, Yadunund, ijnek
3.4.0 (2022-10-03)
3.3.1 (2022-09-21)
- export rclcpp as dependency (#491)
- silence dperecation warnings using boost macros (#478)
- Contributors: Kenji Brameld
3.3.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#479)
- Remove opencv2.cpp and rename opencv3.cpp to opencv4.cpp (#480)
- Deprecate .h files in favor of .hpp headers (#448)
- Reorganize author tag (#460)
- Add colormap argument to python wrapper (#452)
- Fix 16U encoding type (#459)
- Add type adapter for cv::Mat (#441)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, Marcel Zeilinger, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 4.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2025-12-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
4.1.0 (2024-04-19)
4.0.0 (2024-04-13)
- Decode images in mode IMREAD_UNCHANGED (#520)
- Remove header files that were deprecated in I-turtle (#517)
- Fixed converstion for 32FC1 (#514)
- Allow users to override encoding string in ROSCvMatContainer (#505)
- Ensure dynamic scaling works when given matrix with inf, -inf and nan values. (#498)
- Add new CMake option CV_BRIDGE_DISABLE_PYTHON to cv_bridge to disable building Python support if desired (#494)
- Contributors: Alejandro Hernández Cordero, Christian Rauch, Kenji Brameld, Lightech, Yadunund, ijnek
3.4.0 (2022-10-03)
3.3.1 (2022-09-21)
- export rclcpp as dependency (#491)
- silence dperecation warnings using boost macros (#478)
- Contributors: Kenji Brameld
3.3.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#479)
- Remove opencv2.cpp and rename opencv3.cpp to opencv4.cpp (#480)
- Deprecate .h files in favor of .hpp headers (#448)
- Reorganize author tag (#460)
- Add colormap argument to python wrapper (#452)
- Fix 16U encoding type (#459)
- Add type adapter for cv::Mat (#441)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, Marcel Zeilinger, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 4.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2025-12-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
4.1.0 (2024-04-19)
4.0.0 (2024-04-13)
- Decode images in mode IMREAD_UNCHANGED (#520)
- Remove header files that were deprecated in I-turtle (#517)
- Fixed converstion for 32FC1 (#514)
- Allow users to override encoding string in ROSCvMatContainer (#505)
- Ensure dynamic scaling works when given matrix with inf, -inf and nan values. (#498)
- Add new CMake option CV_BRIDGE_DISABLE_PYTHON to cv_bridge to disable building Python support if desired (#494)
- Contributors: Alejandro Hernández Cordero, Christian Rauch, Kenji Brameld, Lightech, Yadunund, ijnek
3.4.0 (2022-10-03)
3.3.1 (2022-09-21)
- export rclcpp as dependency (#491)
- silence dperecation warnings using boost macros (#478)
- Contributors: Kenji Brameld
3.3.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#479)
- Remove opencv2.cpp and rename opencv3.cpp to opencv4.cpp (#480)
- Deprecate .h files in favor of .hpp headers (#448)
- Reorganize author tag (#460)
- Add colormap argument to python wrapper (#452)
- Fix 16U encoding type (#459)
- Add type adapter for cv::Mat (#441)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, Marcel Zeilinger, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 4.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2025-12-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
4.1.0 (2024-04-19)
4.0.0 (2024-04-13)
- Decode images in mode IMREAD_UNCHANGED (#520)
- Remove header files that were deprecated in I-turtle (#517)
- Fixed converstion for 32FC1 (#514)
- Allow users to override encoding string in ROSCvMatContainer (#505)
- Ensure dynamic scaling works when given matrix with inf, -inf and nan values. (#498)
- Add new CMake option CV_BRIDGE_DISABLE_PYTHON to cv_bridge to disable building Python support if desired (#494)
- Contributors: Alejandro Hernández Cordero, Christian Rauch, Kenji Brameld, Lightech, Yadunund, ijnek
3.4.0 (2022-10-03)
3.3.1 (2022-09-21)
- export rclcpp as dependency (#491)
- silence dperecation warnings using boost macros (#478)
- Contributors: Kenji Brameld
3.3.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#479)
- Remove opencv2.cpp and rename opencv3.cpp to opencv4.cpp (#480)
- Deprecate .h files in favor of .hpp headers (#448)
- Reorganize author tag (#460)
- Add colormap argument to python wrapper (#452)
- Fix 16U encoding type (#459)
- Add type adapter for cv::Mat (#441)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, Marcel Zeilinger, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 3.2.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-12-02 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.2.1 (2022-09-21)
- silence dperecation warnings using boost macros (#492)
- Contributors: Kenji Brameld
3.2.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#483)
- Fix 16U encoding type (#463)
- Reorganize author tag (#469)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 3.2.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-12-02 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.2.1 (2022-09-21)
- silence dperecation warnings using boost macros (#492)
- Contributors: Kenji Brameld
3.2.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#483)
- Fix 16U encoding type (#463)
- Reorganize author tag (#469)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 3.2.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-12-02 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.2.1 (2022-09-21)
- silence dperecation warnings using boost macros (#492)
- Contributors: Kenji Brameld
3.2.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#483)
- Fix 16U encoding type (#463)
- Reorganize author tag (#469)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 2.1.4 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | eloquent |
| Last Updated | 2020-01-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ethan Gao
Authors
- Patrick Mihelich
- James Bowman
cv_bridge
Introduction
cv_bridge converts between ROS2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ros2 core has already been installed, please refer to ROS2 installation to get started if the ros2 core isn’t ready to use
Install dependencies
OpenCV3 is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ros2 bases on python3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
Now cv_bridge python backend still has dependency on python boost (equal or higer than 1.58.0), and install them as follows in Ubuntu 16.04:
sudo apt install libboost-python1.58.0
cd /usr/lib/x86_64-linux-gnu/ && sudo ln -s libboost_python-py35.so libboost_python3.so
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>
git clone https://github.com/ros-perception/vision_opencv.git
cd vision_opencv
git checkout ros2
colcon build --symlink-install
Run the tests
Python tests have dependency to opencv python support and install it:
pip3 install opencv-python
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higer instead - Not verify with Windows and OS X environment and there may be building or running issues
Changelog for package cv_bridge
2.1.4 (2020-01-17)
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string (#305)
- include Boost to fix Windows build (#290)
- Export interfaces for Win32 Shared Lib (#301)
- Contributors: Dirk Thomas, Jonathan Noyola, Sean Yen
2.1.2 (2019-05-30)
- Suppress Boost Python warning. (#279)
- silence unused return value warnings (#276)
- Contributors: Karsten Knese, Michael Carroll
2.1.1 (2019-04-26)
- Replace ament commands with colcon (#263) Latest ros2 repo does not include ament_tools. Executing ament command results in error.
- Contributors: Lalit Begani
2.1.0 (2018-11-26)
- find boost_python on boost 1.58 (<1.65) (#246)
- Contributors: Mikael Arguedas
2.0.5 (2018-08-17)
- remove redundant ament_auto_lint dependency to release package
- fix test_encode_decode_cv2_compressed runtime error with JPEG2000
- change python3-numpy as build and execution dependency to fix building error while releasing package
- Contributor: Ethan Gao
2.0.4 (2018-08-14)
- Add libopencv-dev as dependency of cv_bridge
- Replace assert_equal with assert to remove dependency to nose package
- Contributor: Ethan Gao
2.0.3 (2018-08-07)
- fix the build warning with colcon building
- optimize buffer type of imgmsg_to_cv2()
- add python3_opencv and python3_numpy as dependency
- uncrustify 0.67 coding style alignment
- Contributors: Mikael Arguedas, Lars Berscheid, Ethan Gao
2.0.2 (2018-06-29)
- fix rosdep keys issue of opencv3
2.0.1 (2018-06-28)
2.0.0 (2018-06-06)
- Port cv_bridge to ros2
- Remove the old inherent boost files
- Replace boost code with newer C++ standard higher than C++11
- Add a new readme
- Adapt message definition like sensor_msg/Image etc in ROS2
- Coding style alignment with ROS2 using cppcheck/cpplint and python flake8/pep257
- Enable all the C++/Python unit test with gtest and unittest with ament tools
- Contributors: Ethan Gao
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| sensor_msgs |
System Dependencies
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 3.2.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-12-02 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.2.1 (2022-09-21)
- silence dperecation warnings using boost macros (#492)
- Contributors: Kenji Brameld
3.2.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#483)
- Fix 16U encoding type (#463)
- Reorganize author tag (#469)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2 (#324)
- Corrected the typo of Boost_INCLUDE_DIRS (#315)
- use target include directories (#313)
- Contributors: Karsten Knese, Lewis Liu, Michael Carroll, Mikael Arguedas, Sean Yen
2.1.3 (2019-10-23)
- populate array.array directly instead of converting to and from a string
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 3.1.3 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2022-10-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.1.3 (2022-10-15)
- Add message to print out Boost_VERSION_STRING, and apply with CMP0093
- Fix RHEL buildfailure with Boost 1.66.0
- Contributors: Kenji Brameld
3.1.2 (2022-09-21)
- Fix windows build when Boost 1.67 or newer (#489)
- Contributors: Kenji Brameld
3.1.1 (2022-09-17)
- Revert API breakages
- Contributors: Kenji Brameld
3.1.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#482)
- Fix 16U encoding type (#462)
- Reorganize author tag (#468)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Update README.md (#252)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 3.0.7 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | foxy |
| Last Updated | 2022-10-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.0.7 (2022-10-15)
- Add message to print out Boost_VERSION_STRING, and apply with CMP0093
- Address RHEL buildfailure with Boost 1.66.0
- Contributors: Kenji Brameld
3.0.6 (2022-09-21)
- Fix windows build when Boost 1.67 or newer (#488)
- Contributors: Kenji Brameld
3.0.5 (2022-09-17)
- Revert API breakages
- Contributors: Kenji Brameld
3.0.4 (2022-09-14)
- Add apache license and bsd license, because both are used. (#481)
- Fix 16U encoding type (#461)
- Reorganize author tag (#467)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
- Contributors: Homalozoa X, Jacob Perron, Patrick Musau, Sean Yen, Shane Loretz
2.2.1 (2020-07-16)
- Align module.hpp with noetic (#342)
- Contributors: Michael Carroll
2.2.0 (2020-05-27)
- Disable portable image tests (#337)
- use more specific boost rosdep keys (#319)
- add opencv4 into the dependency list for ROS2
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 3.5.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-04-13 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kenji Brameld
Authors
- Patrick Mihelich
- James Bowman
- Ethan Gao
cv_bridge
Introduction
cv_bridge converts between ROS 2 image messages and OpenCV image representation for perception applications. As follows:
This ros2 branch initially derives from porting on the basis of ros kinetic branch
Installation
Firstly, it assumes that the ROS 2 core has already been installed, please refer to ROS 2 installation to get started.
Install dependencies
OpenCV3+ is a must to install, please refer to the official installation guide from OpenCV Tutorials Since ROS 2 uses Python 3, please make sure that python3-numpy is installed, or install like this:
sudo apt install python3-numpy
The cv_bridge python backend still has a dependency on python boost (equal or higher than 1.58.0), and install them as follows in Ubuntu:
sudo apt install libboost-python-dev
Build and Test
Fetch the latest code and build
cd <YOUR_ROS2_WORKSPACE>/src
git clone https://github.com/ros-perception/vision_opencv.git -b ros2
cd ..
colcon build --symlink-install
Run the tests
Python tests have a dependency on OpenCV Python support. To install it:
sudo apt install python3-opencv
Next to prepare runtime environment and run tests:
source <YOUR_ROS2_WORKSPACE>/install/local_setup.bash
colcon test
Known issues
-
boost endian: remove boost endian APIs with standard C++ 11 or higher instead - Not tested with Windows or macOS environments so there may be issues building or running
Changelog for package cv_bridge
3.5.0 (2024-04-13)
- Fixed converstion for 32FC1 (#514)
- Allow users to override encoding string in ROSCvMatContainer (#505)
- Ensure dynamic scaling works when given matrix with inf, -inf and nan values. (#498)
- Add new CMake option CV_BRIDGE_DISABLE_PYTHON to cv_bridge to disable building Python support if desired (#494)
- Contributors: Alejandro Hernández Cordero, Kenji Brameld, Lightech, Yadunund, ijnek
3.4.0 (2022-10-03)
3.3.1 (2022-09-21)
- export rclcpp as dependency (#491)
- silence dperecation warnings using boost macros (#478)
- Contributors: Kenji Brameld
3.3.0 (2022-09-14)
- Add apache license and bsd license, because both are used. (#479)
- Remove opencv2.cpp and rename opencv3.cpp to opencv4.cpp (#480)
- Deprecate .h files in favor of .hpp headers (#448)
- Reorganize author tag (#460)
- Add colormap argument to python wrapper (#452)
- Fix 16U encoding type (#459)
- Add type adapter for cv::Mat (#441)
- Update maintainers (#451)
- Fix ModuleNotFoundError: No module named 'cv_bridge' error (#444)
- Make python3-opencv from test_depend to depend tag in package.xml (#439)
- Contributors: Daisuke Nishimatsu, Kenji Brameld, Marcel Zeilinger, RachelRen05
3.0.3 (2022-04-01)
- Add missing dependency on rcpputils (#427)
- Contributors: Shane Loretz
3.0.2 (2022-01-27)
- Minor cleanups to the ROS 2 branch (#418)
- Find Python3 if not on Android (#423)
- Forward ports from noetic (#420)
- Contributors: Chris Lalancette, Christian Rauch, Michael Carroll, Naoya Yamaguchi, Shane Loretz
3.0.1 (2022-01-25)
- Use Boost::python3 if Boost < 1.67 (#422)
- Use Boost::pythonXY target (#421)
- Contributors: Shane Loretz
3.0.0 (2022-01-19)
- Export Modern CMake targets and install includes to another folder(#419)
- Handle padded img msg in Python (#400)
- Remove boost endian (#399)
- Add conversions from YUV422 YUY2 (#396)
- fix endianness comparison (#397)
- Export sensor_msgs dependency (#392)
- Fix multiple undefined references (#370)
- Updated [cv_bridge.dll]{.title-ref} install location. (#356)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_ros | |
| python_cmake_module | |
| ament_index_python | |
| ament_cmake_gtest | |
| ament_cmake_pytest | |
| ament_lint_auto | |
| ament_lint_common | |
| rclcpp | |
| rcpputils | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 1.12.8 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2019-12-10 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Changelog for package cv_bridge
1.12.8 (2018-04-17)
- Merge pull request #191 from patrickelectric/kinetic cv2_to_imgmsg: step must be int
- cv2_to_imgmsg: step must be int Signed-off-by: Patrick José Pereira <<patrickelectric@gmail.com>>
- Contributors: Patrick José Pereira, Vincent Rabaud
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
-
split the conversion tests out of enumerants
-
support is_bigendian in Python Fixes #114 Also fixes mono16 test
-
Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| opencv3 | |
| rosconsole | |
| sensor_msgs | |
| catkin | |
| rostest |
System Dependencies
| Name |
|---|
| boost |
| python |
| dvipng |
| python-numpy |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 1.11.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | indigo |
| Last Updated | 2017-11-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Changelog for package cv_bridge
1.11.16 (2017-11-05)
- Silence warnings about un-used variables
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- export OpenCV variables
- Properly deal with alpha in image compression. That fixes #169
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.11.15 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries, Vincent Rabaud
1.11.14 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.11.13 (2016-07-11)
-
split the conversion tests out of enumerants
-
support is_bigendian in Python Fixes #114 Also fixes mono16 test
-
Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
- remove space trailer.
- remove space from empty lines.
- another set of for loops, it will make things easier to track. In that new set, just have the number of channels in ([],1,3,4) (ignore two for jpg). from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721943
- keep the OpenCV error message. from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721013 add debug print for test. add case for 4 channels in test. remove 4 channels case from compressed test. add debug print for test. change typo of format. fix typo in format. change from dip to dib. change to IMREAD_ANYCOLOR as python code. (as it should). rename TIFF to tiff Sperate the tests one for regular images and one for compressed. update comment
-
Add CvtColorForDisplayOptions with new colormap param
-
fix doc jobs
-
Add python binding for cv_bridge::cvtColorForDisplay
-
Fix compilation of cv_bridge with opencv3 and python3.
-
Don't colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized. (currently, depth images with 32FC1 is also colorized.)
-
Contributors: Kentaro Wada, Maarten de Vries, Vincent Rabaud, talregev
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 1.11.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | indigo |
| Last Updated | 2017-11-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Changelog for package cv_bridge
1.11.16 (2017-11-05)
- Silence warnings about un-used variables
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- export OpenCV variables
- Properly deal with alpha in image compression. That fixes #169
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.11.15 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries, Vincent Rabaud
1.11.14 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.11.13 (2016-07-11)
-
split the conversion tests out of enumerants
-
support is_bigendian in Python Fixes #114 Also fixes mono16 test
-
Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
- remove space trailer.
- remove space from empty lines.
- another set of for loops, it will make things easier to track. In that new set, just have the number of channels in ([],1,3,4) (ignore two for jpg). from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721943
- keep the OpenCV error message. from: https://github.com/ros-perception/vision_opencv/pull/132#discussion_r66721013 add debug print for test. add case for 4 channels in test. remove 4 channels case from compressed test. add debug print for test. change typo of format. fix typo in format. change from dip to dib. change to IMREAD_ANYCOLOR as python code. (as it should). rename TIFF to tiff Sperate the tests one for regular images and one for compressed. update comment
-
Add CvtColorForDisplayOptions with new colormap param
-
fix doc jobs
-
Add python binding for cv_bridge::cvtColorForDisplay
-
Fix compilation of cv_bridge with opencv3 and python3.
-
Don't colorize float image as label image This is a bug and image whose encoding is other than 32SC1 should not be colorized. (currently, depth images with 32FC1 is also colorized.)
-
Contributors: Kentaro Wada, Maarten de Vries, Vincent Rabaud, talregev
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 1.10.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | groovy-devel |
| Last Updated | 2014-10-28 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
1.10.18 (2014-06-08)
- Correct dependency from non-existent package to cv_bridge
- Contributors: Isaac Isao Saito
1.10.17 (2014-04-18)
1.10.14 (2013-11-23)
- fix compilation on OSX
1.10.13 (2013-11-23)
- fix compilation on older NumPy
1.10.12 (2013-11-22)
- fix #27 and #28 for non-aligned images (thx \@jensenb !)
- fix #26 for support of numpy cv2 API
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 1.12.8 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2019-12-10 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Changelog for package cv_bridge
1.12.8 (2018-04-17)
- Merge pull request #191 from patrickelectric/kinetic cv2_to_imgmsg: step must be int
- cv2_to_imgmsg: step must be int Signed-off-by: Patrick José Pereira <<patrickelectric@gmail.com>>
- Contributors: Patrick José Pereira, Vincent Rabaud
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
-
split the conversion tests out of enumerants
-
support is_bigendian in Python Fixes #114 Also fixes mono16 test
-
Support compressed Images messages in python for indigo
- Add cv2_to_comprssed_imgmsg: Convert from cv2 image to compressed image ros msg.
- Add comprssed_imgmsg_to_cv2: Convert the compress message to a new image.
- Add compressed image tests.
- Add time to msgs (compressed and regular). add enumerants test for compressed image. merge the compressed tests with the regular ones. better comment explanation. I will squash this commit. Fix indentation fix typo mistage: from .imgmsg_to_compressed_cv2 to .compressed_imgmsg_to_cv2. remove cv2.CV_8UC1 remove rospy and time depndency. change from IMREAD_COLOR to IMREAD_ANYCOLOR.
- make indentaion of 4.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| opencv3 | |
| rosconsole | |
| sensor_msgs | |
| catkin | |
| rostest |
System Dependencies
| Name |
|---|
| boost |
| python |
| dvipng |
| python-numpy |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 1.13.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2022-10-03 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Changelog for package cv_bridge
1.13.1 (2022-10-03)
- Fix endian mismatch issue per boostorg/python PR #218
- Update CMakeLists.txt for Windows build environment (#265)
- Remove path splash separator from 'package_dir' (#267)
- Fix travis. (#269)
- Contributors: Duan Yutong, James Xu, Kenji Brameld, Sean Yen
1.13.0 (2018-04-30)
- Use rosdep OpenCV and not ROS one. We defintely don't need the whole OpenCV. We need to clean the rosdep keys.
- Contributors: Vincent Rabaud
1.12.8 (2018-04-17)
- Merge pull request #191 from patrickelectric/kinetic cv2_to_imgmsg: step must be int
- cv2_to_imgmsg: step must be int Signed-off-by: Patrick José Pereira <<patrickelectric@gmail.com>>
- Contributors: Patrick José Pereira, Vincent Rabaud
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
1.12.3 (2016-12-04)
- Use api in sensor_msgs to get byte_depth and num channels
- Implement cpp conversion of N channel image This is cpp version of https://github.com/ros-perception/vision_opencv/pull/141, which is one for python.
- Fill black color to depth nan region
- address gcc6 build error in cv_bridge and tune With gcc6, compiling fails with [stdlib.h: No such file or directory]{.title-ref}, as including '-isystem /usr/include' breaks with gcc6, cf., https://gcc.gnu.org/bugzilla/show_bug.cgi?id=70129 This commit addresses this issue for cv_bridge in the same way it was done in the commit ead421b8 [1] for image_geometry. This issue was also addressed in various other ROS packages. A list of related commits and pull requests is at: https://github.com/ros/rosdistro/issues/12783 [1] https://github.com/ros-perception/vision_opencv/commit/ead421b85eeb750cbf7988657015296ed6789bcf Signed-off-by: Lukas Bulwahn <<lukas.bulwahn@oss.bmw-carit.de>>
- cv_bridge: Add missing test_depend on numpy
- Contributors: Kentaro Wada, Lukas Bulwahn, Maarten de Vries
1.12.2 (2016-09-24)
- Specify background label when colorizing label image
- Adjust to arbitrary image channels like 32FC40 Proper fix for #141
- Remove unexpectedly included print statement
- Contributors: Kentaro Wada, Vincent Rabaud
1.12.1 (2016-07-11)
-
split the conversion tests out of enumerants
-
support is_bigendian in Python Fixes #114
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged cv_bridge at Robotics Stack Exchange
|
|
cv_bridge package from vision_opencv repocv_bridge image_geometry opencv_tests vision_opencv |
ROS Distro
|
Package Summary
| Version | 1.16.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-perception/vision_opencv.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2024-08-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Vincent Rabaud
Authors
- Patrick Mihelich
- James Bowman
Changelog for package cv_bridge
1.16.2 (2022-10-03)
1.16.1 (2022-09-06)
- Fix 16U encoding type (#445)
- Add header arg to cv2_to_imgmsg (#326)
- Contributors: Ibrahim Essam, Kenji Brameld, Naoya Yamaguchi
1.16.0 (2021-11-23)
- prevent conversion of single channel 16bit integer images to/from colour (#412)
- decode images in mode IMREAD_UNCHANGED (#228)
- Optimize includes (#354) As suggested by include-what-you-use
- Fix Python linking on OSX (#331)
- Fix typo (#333)
- Contributors: Christian Rauch, Markus Vieth, Matthijs van der Burgh, Tobias Fischer
1.15.0 (2020-05-19)
- [Noetic] Use opencv3 on buster (#330)
- more portable fixes. (#328)
- Contributors: Sean Yen, Shane Loretz
1.14.0 (2020-04-06)
- Noetic release (#323)
- update CMakeLists.txt for Windows build environment (#265)
- remove path splash separator from 'package_dir' (#267)
- fix travis. (#269)
- Contributors: Alejandro Hernández Cordero, James Xu, Sean Yen
1.13.0 (2018-04-30)
- Use rosdep OpenCV and not ROS one. We defintely don't need the whole OpenCV. We need to clean the rosdep keys.
- Contributors: Vincent Rabaud
1.12.8 (2018-04-17)
- Merge pull request #191 from patrickelectric/kinetic cv2_to_imgmsg: step must be int
- cv2_to_imgmsg: step must be int Signed-off-by: Patrick José Pereira <<patrickelectric@gmail.com>>
- Contributors: Patrick José Pereira, Vincent Rabaud
1.12.7 (2017-11-12)
1.12.6 (2017-11-11)
- fix endianness issues
- Contributors: Vincent Rabaud
1.12.5 (2017-11-05)
- add version_gte for opencv3 \@vrabaud If you'll update opencv3 version as discussed in https://discourse.ros.org/t/opencv-3-3/2674/4, I think we'd better to add 'version_gte' tag so that apt-get install ros-kinetic-cv-bridge also pulls openv3.3 from repository, to avoid API breaking issue between opencv2 and opencv3.
- Simplify the dependency components of cv_bridge Fixes #183
- Fixes #177 The Python bridge was wrong on OpenCV2 with mono8 (and any Mat with only two dimensions btw). Took the official Python bridge from OpenCV.
- Add missing test file This fixes #171
- Properly deal with alpha in image compression. That fixes #169
- Silence warnings about un-used variables
- export OpenCV variables
- Contributors: Kei Okada, Victor Lamoine, Vincent Rabaud
1.12.4 (2017-01-29)
- properly find Boost Python 2 or 3 This fixes #158
- Contributors: Vincent Rabaud
File truncated at 100 lines see the full file