
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:

Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics

confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
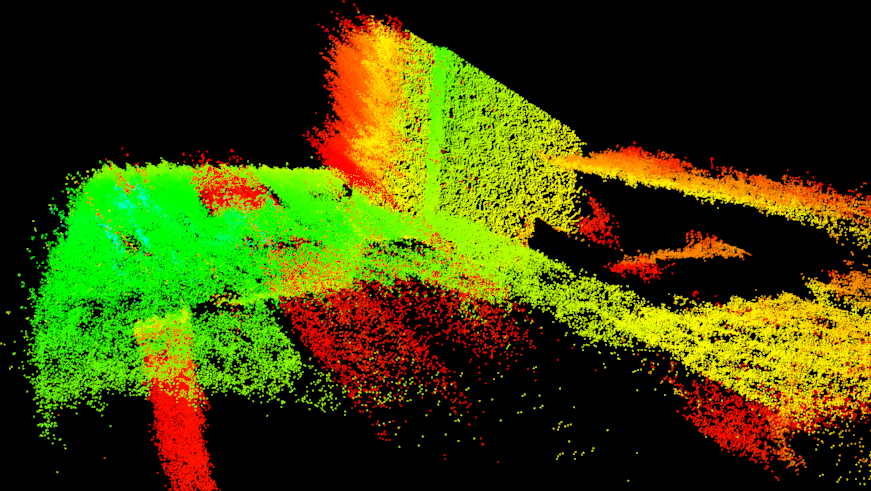
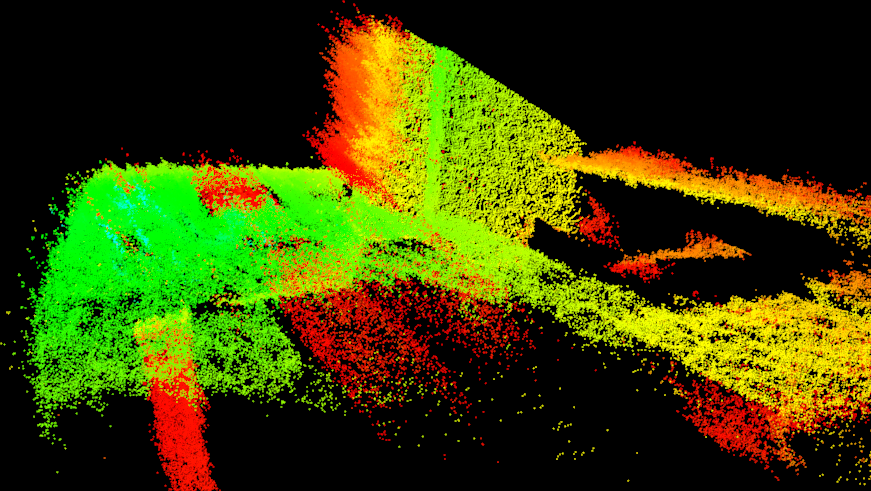
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
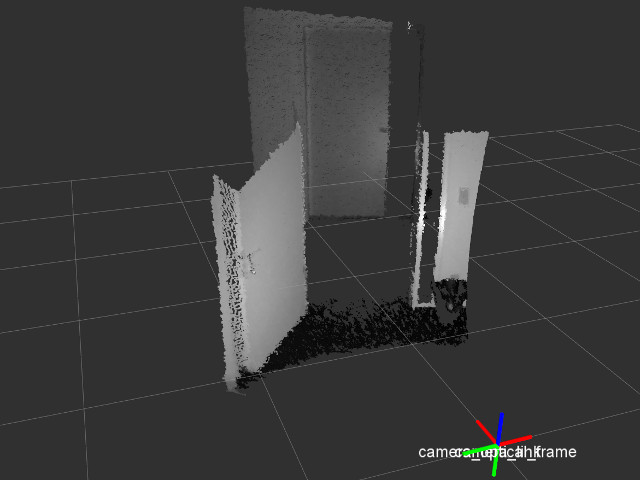
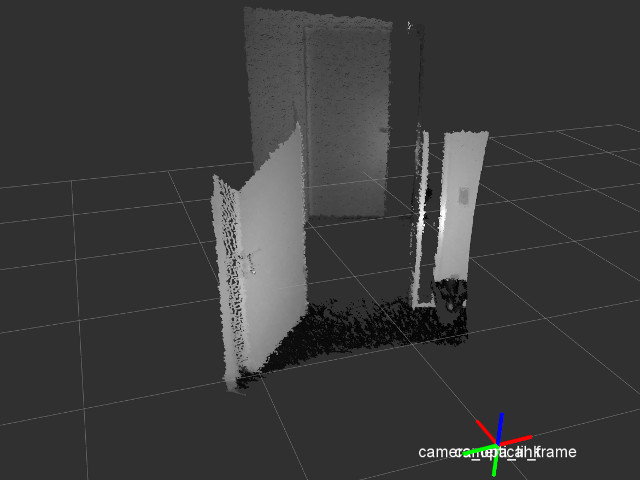
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:

Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
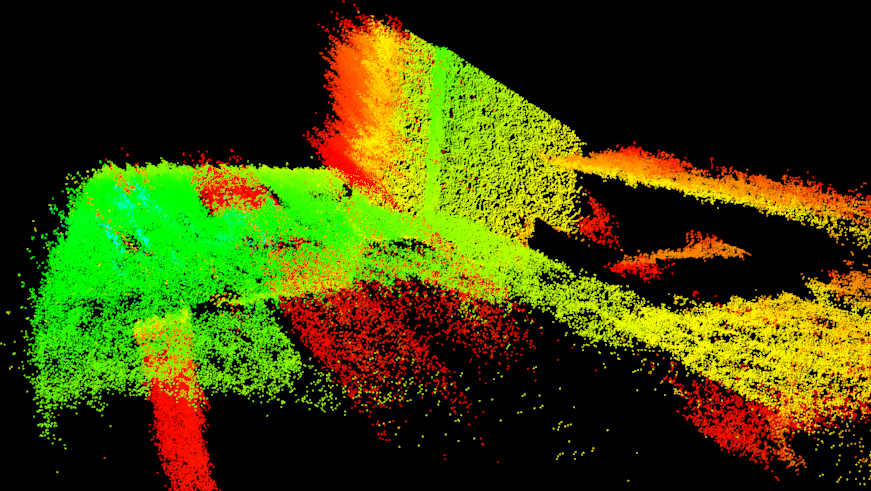
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
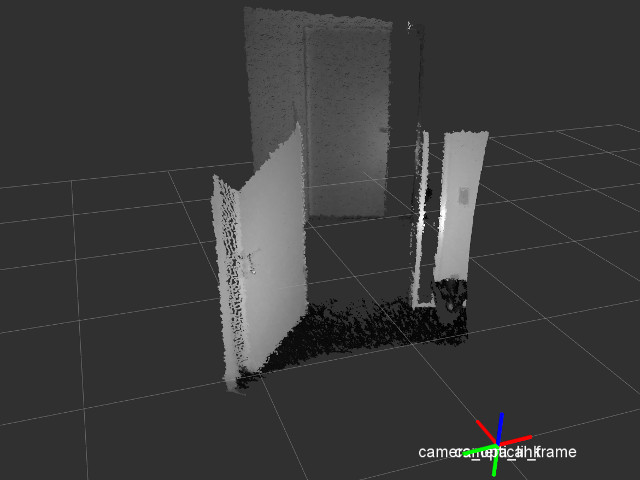
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | jade |
| Last Updated | 2018-01-31 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:

Installation
- Get the file
basler-tof-driver-1.3.2-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics

confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:

Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | indigo |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:

Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics

confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:

Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-03-05 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:
Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Running
roslaunch basler_tof basler_tof.launch
ROS API (basler_tof_node)
Published Topics
confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
depth/points (sensor_msgs/PointCloud2)
- Point cloud computed from the depth/image_raw and depth/camera_info topic. No
intensities, but takes into account user calibration. This topic is not
directly published by the node, but by the
depth_image_proc/point_cloud_xyznodelet in the launch file.
There are also several rectified topics published via image_proc in the
launch file, for example intensity/image_rect:
Parameters
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2020-11-16 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:

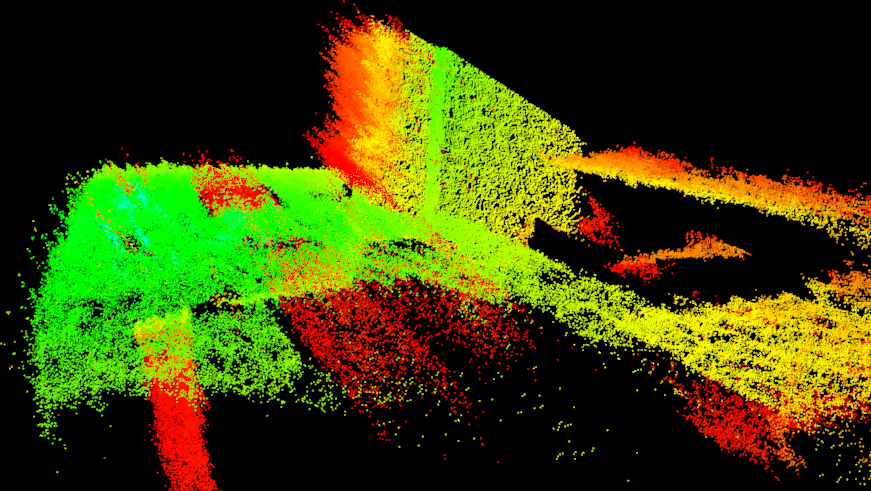
Linux Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Windows Installation
- Install the Basler ToF Windows driver from baslerweb.com
- Create a folder to be your catkin workspace
- Create a
srcsubdirectory, and clone this repository tobasler_tofunder thatsrcdirectory - Invoke
catkin_makefrom your catkin workspace, and then source the new package into ROS
c:\ws>catkin_make
c:\ws>.\devel\setup.bat
Running
Linux:
roslaunch basler_tof basler_tof.launch
Windows:
roslaunch basler_tof basler_tof_win.launch
ROS API (basler_tof_node)
Published Topics

confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
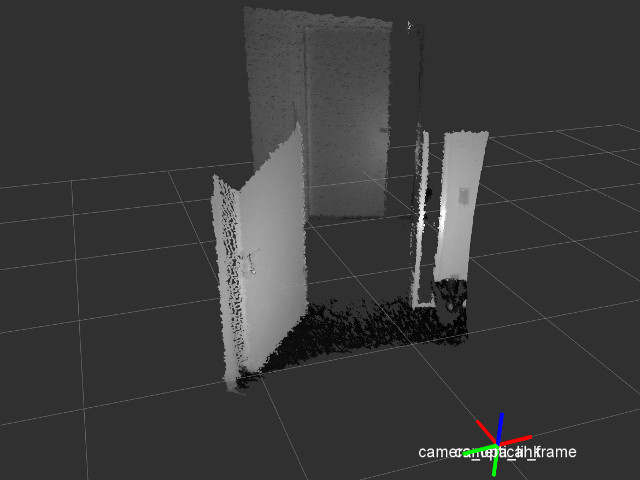
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- device_channel [default: 0]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- device_channel [default: $(arg device_channel)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/basler_tof_win.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: C:/Program Files/Basler/ToF/bin/x64]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.win.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: C:/Program Files/Basler/ToF/bin/x64]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- device_channel [default: 0]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2020-11-16 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:

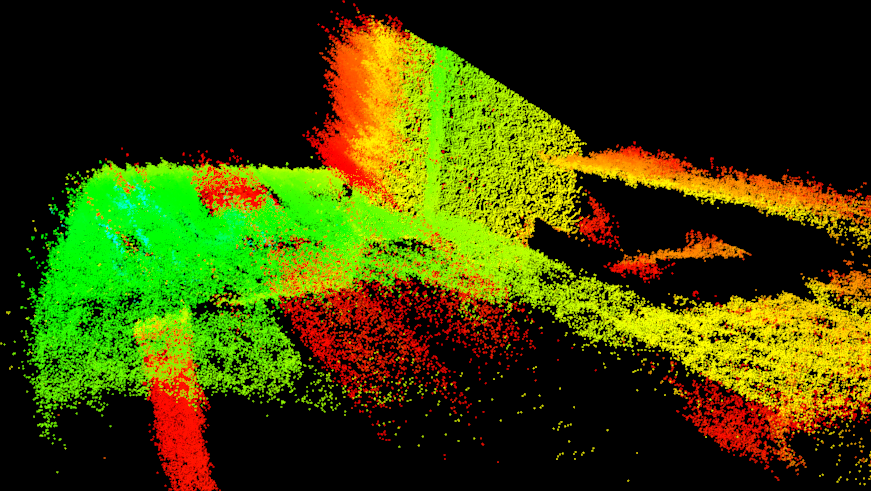
Linux Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Windows Installation
- Install the Basler ToF Windows driver from baslerweb.com
- Create a folder to be your catkin workspace
- Create a
srcsubdirectory, and clone this repository tobasler_tofunder thatsrcdirectory - Invoke
catkin_makefrom your catkin workspace, and then source the new package into ROS
c:\ws>catkin_make
c:\ws>.\devel\setup.bat
Running
Linux:
roslaunch basler_tof basler_tof.launch
Windows:
roslaunch basler_tof basler_tof_win.launch
ROS API (basler_tof_node)
Published Topics

confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
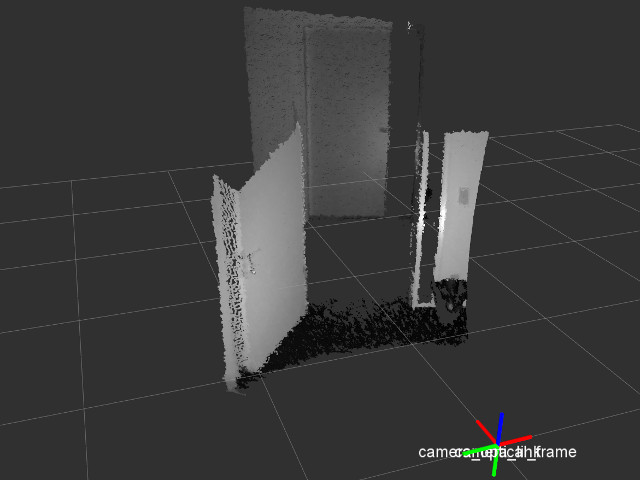
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- device_channel [default: 0]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- device_channel [default: $(arg device_channel)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/basler_tof_win.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: C:/Program Files/Basler/ToF/bin/x64]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.win.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: C:/Program Files/Basler/ToF/bin/x64]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- device_channel [default: 0]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]
Messages
Services
Plugins
Recent questions tagged basler_tof at Robotics Stack Exchange
|
|
basler_tof package from basler_tof repobasler_tof |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/uos/basler_tof.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2020-11-16 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Guenther
Authors
- Martin Guenther
Basler ToF camera ROS driver
This is a ROS driver for the Basler ToF ES (Engineering Sample) 3D camera:

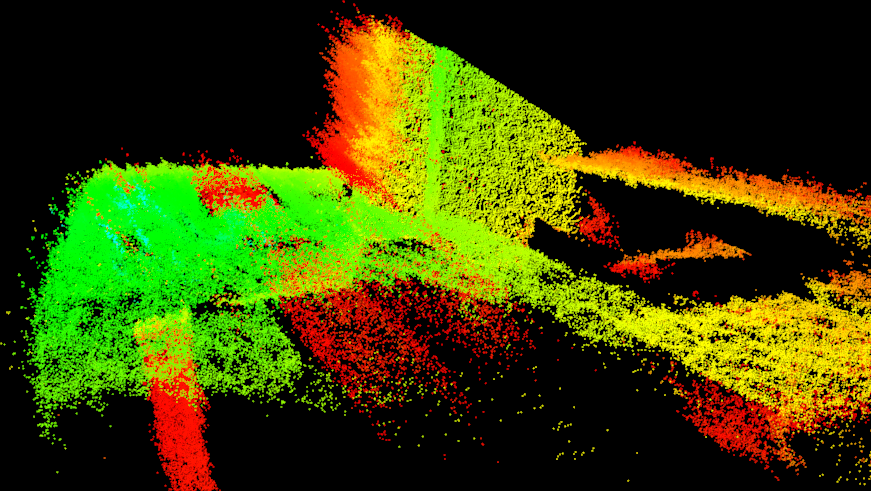
Linux Installation
- Get the file
basler-tof-driver-1.4.1.1450-x86_64.tar.gz(available from baslerweb.com) and unpack it. (This driver has been tested with versions 1.0.6, 1.1.0, 1.2.1, 1.3.1 and 1.3.2 ofbasler-tof-driver, but should work with any version >= 1.0.6 . Version 1.2.1 or later is recommended due to the improvements in the postprocessing filters. - When you upgrade from one BaslerToF library version to another, make sure to remove your build directory and rebuild. For some reason, cmake does not properly detect that the node has to be rebuilt.
- Move the directory
BaslerToFfrom that archive to/opt/BaslerToF. - Do not put this directory on your
LD_LIBRARY_PATH; it contains custom versions of Qt and other libraries that interfere with the system libraries. - Clone this repo into your Catkin workspace and install as usual. If unsure, refer to the commands in the .travis.yml file.
Windows Installation
- Install the Basler ToF Windows driver from baslerweb.com
- Create a folder to be your catkin workspace
- Create a
srcsubdirectory, and clone this repository tobasler_tofunder thatsrcdirectory - Invoke
catkin_makefrom your catkin workspace, and then source the new package into ROS
c:\ws>catkin_make
c:\ws>.\devel\setup.bat
Running
Linux:
roslaunch basler_tof basler_tof.launch
Windows:
roslaunch basler_tof basler_tof_win.launch
ROS API (basler_tof_node)
Published Topics

confidence/image_raw (sensor_msgs/Image)
- The confidence image (each pixel represents the confidence in the depth value). This is the same as the intensity image, but with too bright / dark pixels beyond a certain threshold replaced by NaN values.
confidence/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

depth/image_raw (sensor_msgs/Image)
- The depth image.
depth/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).

intensity/image_raw (sensor_msgs/Image)
- The intensity image.
intensity/camera_info (sensor_msgs/CameraInfo)
- The corresponding camera info (calibration values).
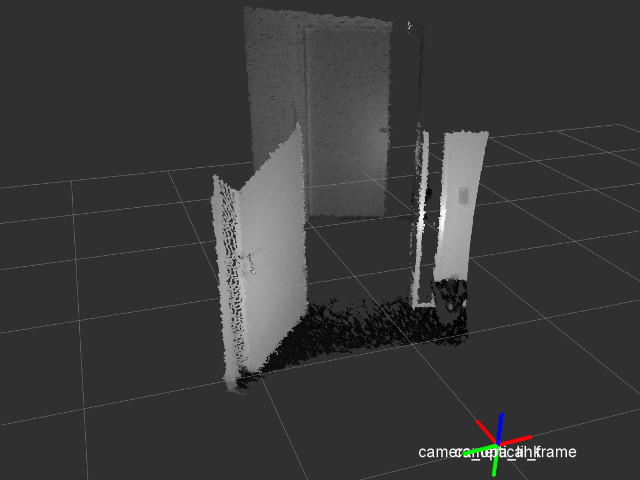
points (sensor_msgs/PointCloud2)
- Point cloud, directly from the device driver. Has intensities, but cannot be user-calibrated.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| camera_info_manager | |
| cv_bridge | |
| dynamic_reconfigure | |
| pcl_conversions | |
| pcl_ros | |
| roscpp | |
| sensor_msgs | |
| tf | |
| catkin |
System Dependencies
| Name |
|---|
| libpcl-all-dev |
| libpcl-all |
Dependant Packages
Launch files
- launch/basler_tof.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- device_channel [default: 0]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- device_channel [default: $(arg device_channel)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/basler_tof_win.launch
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: C:/Program Files/Basler/ToF/bin/x64]
- device_id [default: #1]
- camera_info_url [default: package://basler_tof/camera_info/TOF_ES_21781335.yaml]
- points_xyz [default: true]
- rectify_depth [default: true]
- camera [default: $(arg camera)]
- device_id [default: $(arg device_id)]
- frame_id [default: $(arg frame_id)]
- publish_tf [default: $(arg publish_tf)]
- basler_tof_path [default: $(arg basler_tof_path)]
- camera_info_url [default: $(arg camera_info_url)]
- camera [default: $(arg camera)]
- points_xyz [default: $(arg points_xyz)]
- rectify_depth [default: $(arg rectify_depth)]
- launch/includes/device.launch.win.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: C:/Program Files/Basler/ToF/bin/x64]
- device_id [default: #1]
- camera_info_url [default: ]
- launch/includes/device.launch.xml
-
- camera [default: camera]
- frame_id [default: $(arg camera)_optical_frame]
- publish_tf [default: true]
- basler_tof_path [default: /opt/BaslerToF]
- device_id [default: #1]
- device_channel [default: 0]
- camera_info_url [default: ]
- launch/includes/processing.launch.xml
-
- camera [default: camera]
- points_xyz [default: true]
- rectify_depth [default: true]