
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
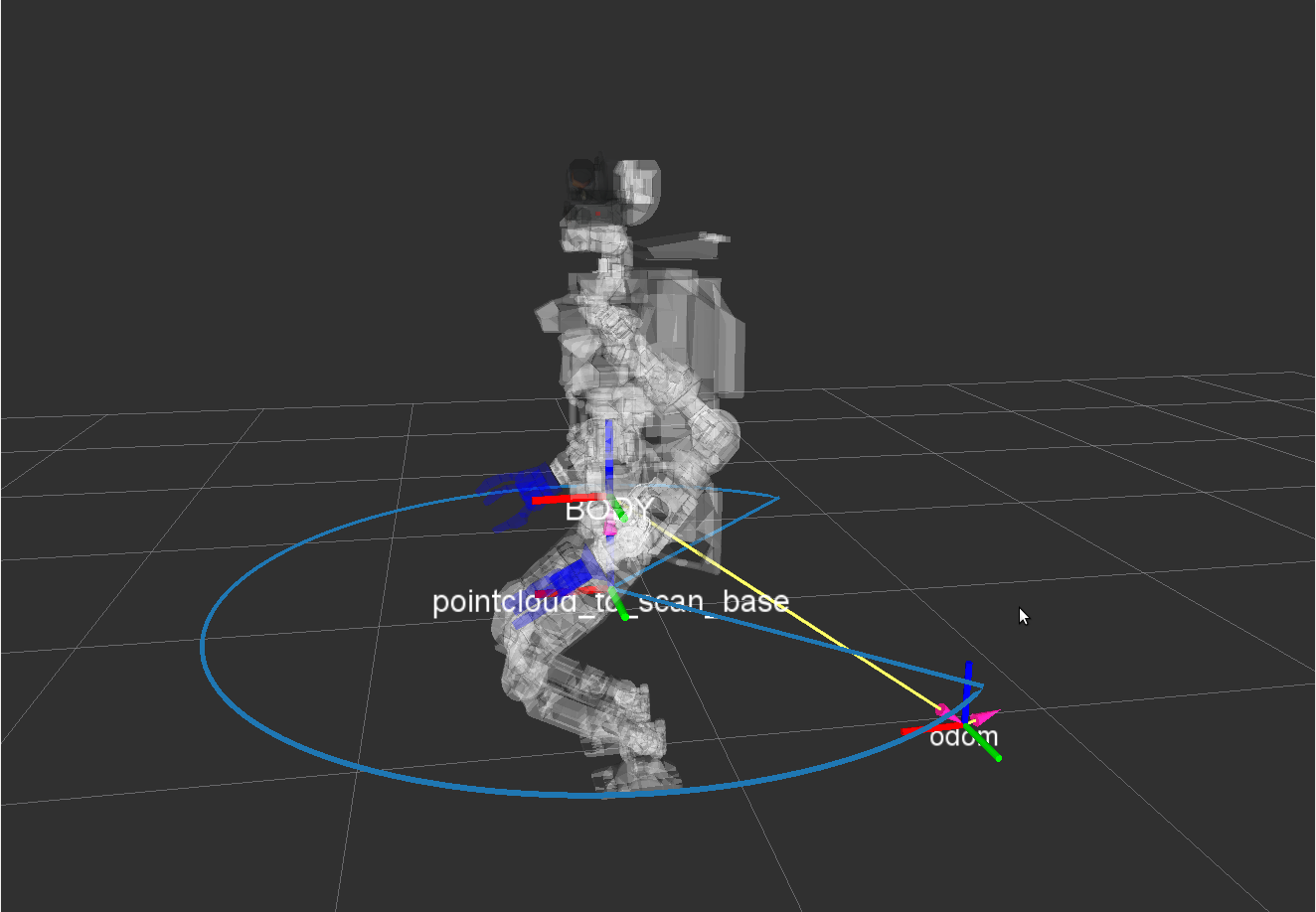
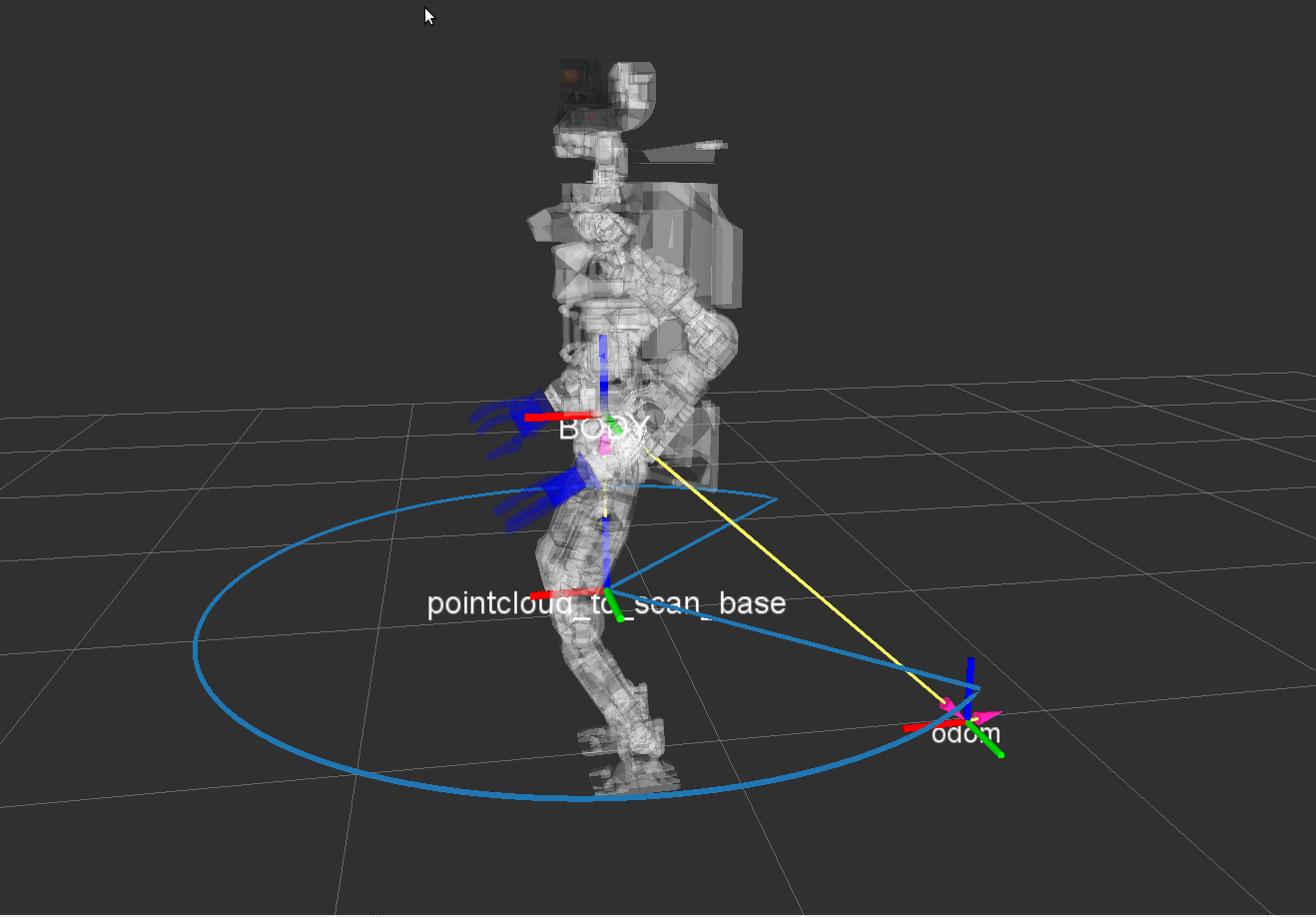
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
Package Summary
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
File truncated at 100 lines see the full file
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Launch files
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/mongodb_local.launch
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/test/simulate_lazy.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- apps/check_use_sim_time/check_use_sim_time.xml
- apps/personal_use/personal_use.xml