
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
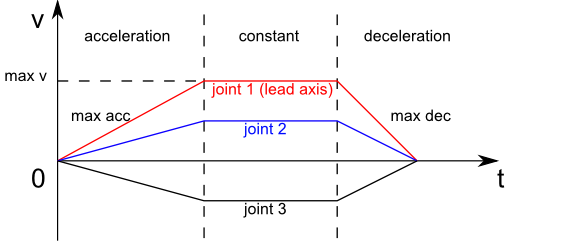
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_robot_programming pilz_store_positions pilz_trajectory_generation |
ROS Distro
|
Package Deprecated
This package has been integrated into MoveIt. Please consider using the new package pilz_industrial_motion_planner: https://moveit.ros.org/documentation/planners/Package Summary
| Version | 0.4.14 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | DEPRECATED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | melodic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
This package has been integrated into moveit and is deprecated here.
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
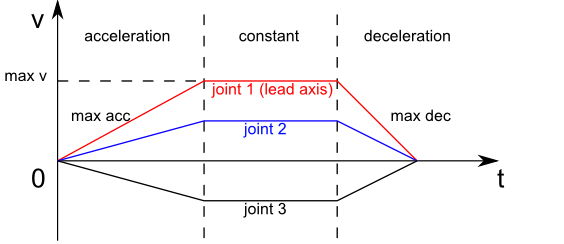
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.4.14 (2021-07-22)
- Deprecate this package since the planner has been integrated into [moveit](https://moveit.ros.org/documentation/planners/).
- Contributors: Pilz GmbH and Co. KG
0.4.13 (2021-07-12)
0.4.12 (2020-11-24)
0.4.11 (2020-07-16)
- Fix CodeCoverage warnings (Remove warnings on normal builds).
- Contributors: Pilz GmbH and Co. KG
0.4.10 (2019-12-04)
0.4.9 (2019-11-28)
0.4.8 (2019-11-22)
0.4.7 (2019-09-10)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.4.6 (2019-09-04)
0.4.5 (2019-09-03)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.4.4 (2019-06-19)
- fixed an error that led to trajectories not strictly increasing in time
- Contributors: Pilz GmbH and Co. KG
0.4.3 (2019-04-08)
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.4.2 (2019-03-13)
- re-adapt to new RobotState API: remove #attempts
- Contributors: Pilz GmbH and Co. KG
0.4.1 (2019-02-27)
0.3.6 (2019-02-26)
- refactor the testdataloader
- adapt to new RobotState API: remove #attempts
- Contributors: Pilz GmbH and Co. KG
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.4.0 (2018-12-18)
- Use Eigen::Isometry3d to keep up with the recent changes in moveit
- Contributors: Chris Lalancette
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]
Messages
Services
Recent questions tagged pilz_trajectory_generation at Robotics Stack Exchange
|
|
pilz_trajectory_generation package from pilz_industrial_motion repopilz_extensions pilz_industrial_motion pilz_industrial_motion_testutils pilz_msgs pilz_robot_programming pilz_trajectory_generation |
ROS Distro
|
Package Summary
| Version | 0.3.10 |
| License | LGPLv3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_industrial_motion.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Immanuel Martini
Authors
Overview
This package provides a trajectory generator to plan standard robot motions like PTP, LIN, CIRC in the form of a MoveIt! PlannerManager plugin.
MoveIt!
MoveIt! is state of the art software for mobile manipulation, incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation. For detailed information, please refer to the MoveIt! website.
ROS API
User Interface MoveGroup
This package implements the planning_interface::PlannerManager interface of MoveIt!. By loading the corresponding
planning pipeline (pilz_command_planner_planning_pipeline.launch.xml in prbt_moveit_config package), the trajectory
generation functionalities can be accessed through the user interface (c++, python or rviz) provided by
the move_group node, e.g. /plan_kinematics_path service and /move_group action. For detailed tutorials please
refer to MoveIt! Tutorials.
Joint Limits
For all commands the planner needs to know the limitations of each robot joint. The limits used are calculated from the limits set in the urdf as well as the limits set on the parameter server (usually put there by loading a *.yaml file such as prbt_moveit_config/config/joint_limits.yaml).
Note that while setting position limits and velocity limits is possible in both the urdf and the parameter server
setting acceleration limits is only possible via the parameter server. In extension to the common has_acceleration and
max_acceleration parameter we added the ability to also set has_deceleration and max_deceleration(<0!).
The limits are merged under the premise that the limits from the parameter server must be stricter or at least equal to the parameters set in the urdf.
Currently the calculated trajectory will respect the limits by using the strictest combination of all limits as a common limit for all joints.
Cartesian Limits
For cartesian trajectory generation (LIN/CIRC) the planner needs an information about the maximum speed in 3D cartesian space. Namely translational/rotational velocity/acceleration/deceleration need to be set on the parameter server like this:
cartesian_limits:
max_trans_vel: 1
max_trans_acc: 2.25
max_trans_dec: -5
max_rot_vel: 1.57
The planners assume the same acceleration ratio for translational and rotational trapezoidal shapes. So the rotational acceleration is calculated as max_trans_acc / max_trans_vel * max_rot_vel (and for deceleration accordingly).
Planning Interface
As defined by the user interface of MoveIt!, this package uses moveit_msgs::MotionPlanRequest and
moveit_msgs::MotionPlanResponse as input and output for motion planning. These message types are designed to be
comprehensive and general. The parameters needed by specific planning algorithm are explained below in detail.
For a general introduction how to fill a MotionPlanRequest see the
Move Group Interface Tutorial.
The planner is able to handle all the different commands. Just put “PTP”, “LIN” or “CIRC” as planner_id in the motion request.
The PTP motion command
This planner generates full synchronized point to point trajectories with trapezoidal joint velocity profile. All joints are assumed to have the same maximal joint velocity/acceleration/deceleration limits. If not, the strictest limits are adopted. The axis with the longest time to reach the goal is selected as the lead axis. Other axes are decelerated so that they share the same acceleration/constant velocity/deceleration phases as the lead axis.
Input parameters in moveit_msgs::MotionPlanRequest
-
planner_id: PTP -
group_name: name of the planning group -
max_velocity_scaling_factor: scaling factor of maximal joint velocity -
max_acceleration_scaling_factor: scaling factor of maximal joint acceleration/deceleration -
start_state/joint_state/(name, position and velocity: joint name/position/velocity(optional) of the start state. -
goal_constraints(goal can be given in joint space or Cartesian space)- for goal in joint space
-
goal_constraints/joint_constraints/joint_name: goal joint name -
goal_constraints/joint_constraints/position: goal joint position
-
- for goal in Cartesian space
-
goal_constraints/position_constraints/header/frame_id: frame this data is associated with -
goal_constraints/position_constraints/link_name: target link name -
goal_constraints/position_constraints/constraint_region: bounding volume of the target point -
goal_constraints/position_constraints/target_point_offset: offset (in the link frame) for the target point on the target link (optional)
-
- for goal in joint space
- max_velocity_scaling_factor: rescale the maximal velocity
- max_acceleration_scaling_factor: rescale the maximal acceleration/deceleration
planning results in moveit_msg::MotionPlanResponse
-
trajectory_start: bypass thestart_stateinmoveit_msgs::MotionPlanRequest -
trajectory/joint_trajectory/joint_names: a list of the joint names of the generated joint trajectory -
trajectory/joint_trajectory/points/(positions,velocities,accelerations,time_from_start): a list of generated way points. Each point has positions/velocities/accelerations of all joints (same order as the joint names) and time from start. The last point will have zero velocity and acceleration. -
group_name: name of the planning group -
error_code/val: error code of the motion planning
The LIN motion command
This planner generates linear Cartesian trajectory between goal and start poses. The planner uses the Cartesian limits to generate a trapezoidal velocity profile in Cartesian space. The translational motion is a linear interpolation between start and goal position vector. The rotational motion is quaternion slerp between start and goal orientation. The translational and rotational motion is synchronized in time. This planner only accepts start state with zero velocity. Planning result is a joint trajectory. The user needs to adapt the Cartesian velocity/acceleration scaling factor if
File truncated at 100 lines see the full file
Changelog for package pilz_trajectory_generation
0.3.10 (2019-09-11)
- Fix clang-tidy issues
- integrate clang-tidy via CMake flag
- Contributors: Pilz GmbH and Co. KG
0.3.9 (2019-09-05)
- Adapt to changes in pilz_robots
- add static code analyzing (clang-tidy)
- drop deprecated isRobotStateEqual()
- Contributors: Pilz GmbH and Co. KG
0.3.8 (2019-07-02)
- Commenting unstable test with franka emika panda
0.3.7 (2019-05-09)
- fixed an error that led to trajectories not strictly increasing in time
- update dependencies of trajectory_generation
- fix CIRC path generator and increase test coverage
- adopt strictest limits in ptp planner (refactor JointLimitsContainer and TrajectoryGeneratorPTP)
- Enable gripper commands inside a sequence
- Contributors: Pilz GmbH and Co. KG
0.3.6 (2019-02-26)
- refactor the testdataloader
0.3.5 (2019-02-06)
- Increase line coverage for blending to 100%
0.3.4 (2019-02-05)
- refactor determining the trajectory alignment in the blend implementation
- extend and refactor unittest of blender_transition_window
- add planning group check to blender_transition_window
0.3.3 (2019-01-25)
- add more details to blend algorithm description
- change handling of empty sequences in capabilities to be non-erroneous
- rename command_planner -> pilz_command_planner
0.3.2 (2019-01-18)
- use pilz_testutils package for blend test
- use collision-aware ik calculation
- Contributors: Pilz GmbH and Co. KG
0.3.1 (2018-12-17)
0.3.0 (2018-11-28)
- add append method for avoiding duplicate points in robot_trajectory trajectories
- Relax the precondition on trajectory generators from v_start==0 to < 1e-10 to gain robustness
- Set last point of generated trajectories to have vel=acc=0 to match the first point.
- add sequence action and service capabilities to concatenate multiple requests
- Contributors: Pilz GmbH and Co. KG
0.1.1 (2018-09-25)
- port to melodic
- drop unused dependencies
- Contributors: Pilz GmbH and Co. KG
0.1.0 (2018-09-14)
- Created trajectory generation package with ptp, lin, circ and blend planner
- Contributors: Pilz GmbH and Co. KG
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pilz_industrial_motion | |
| pilz_robot_programming |
Launch files
- test/test_robots/abb_irb2400/launch/move_group.launch
-
- pipeline [default: pilz_command_planner]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/abb_irb2400/launch/run_abb_irb2400.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- debug [default: false]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/frankaemika_panda/launch/move_group.launch
-
- load_gripper [default: true]
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- test/test_robots/frankaemika_panda/launch/moveit_planning_execution.launch
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
-
- pipeline [default: ompl]
- load_robot_description [default: true]
-
Copyright (c) 2018 Pilz GmbH & Co. KG
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see
- test/test_robots/prbt/launch/test_context.launch
-
- gripper [default: ]
- robot_description [default: robot_description]
- robot_description [default: robot_description_$(arg gripper)]