
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-01 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
-
~initial_pose_yaw(Double, default: 0.0)Relative pose yaw
Subscribing Topics
-
/amcl_pose(geometry_msgs/PoseWithcovariancestamped)
util/mux_selector.py
This node check and select mux input topic on condition of the specified topic.
This node takes three arguments for one topic.
The first one is the topic to be monitored.
When a message from this topic is received, it is assigned as a variable m.
If a condition specified as the second argument,
this node calls a service to select the topic specified as the third argument.
Usage
rosrun jsk_robot_startup mux_selector.py /joy1 'm.buttons[9]==1' /cmd_vel1 /joy2 'm.buttons[9]==1' /cmd_vel2
Parameters
-
~patient(Double, default: 0.5)Indicates the allowable range of the difference between the received topic time and the current time.
-
~frequency(Double, default: 20.0)Frequency of processing loop.
-
~default_select(String, default:None)Default topic name.
-
~wait(Bool, default:False)If wait is
True, this node waits for the topic to be received.
Subscribing Topics
The topic specified in the argument is subscribed.
scripts/check_room_light.py
This node publish the luminance calculated from input image and room light status.
Subscribing Topics
-
~input(sensor_msgs/Imageorsensor_msgs/CompressedImage)Input topic image
Publishing Topics
-
~output(jsk_robot_startup/RoomLight)Room light status and room luminance
Parameters
-
~luminance_threshold(Float, default: 50)Luminance threshold to deteremine whether room light is on or off
-
~image_transport(String, default: raw)Image transport hint.
scripts/shutdown.py
This node shuts down or reboots the robot itself according to the rostopic. Note that this node needs to be run with sudo privileges.
Subscribing Topics
-
shutdown(std_msgs/Empty)Input topic that trigger shutdown.
If
~input_conditionis set, evaluated~input_conditionisTrueand this node received this topic, shutdown will be executed.If you want to force a shutdown in any case, set
~input_conditiontoNoneand sendshutdowntopic. -
reboot(std_msgs/Empty)Input topic that trigger reboot
-
~input(AnyMsg)Input ros message for
~input_condition.
Parameters
-
~shutdown_command(String, default: “/sbin/shutdown -h now”)Command to shutdown the system. You can specify the shutdown command according to your system.
-
~reboot_command(String, default: “/sbin/shutdown -r now”)Command to reboot the system. You can specify the reboot command according to your system.
-
~input_condition(String, default:None)Specify condition to run
~shutdown_commandeven if shutdown topic is received. Use a Python expression that returns a bool value. In addition to a Python builtin functions, you can usetopic(the topic of the message),m(the message) andt(time of message).For example,
~inputtopic isstd_msgs/Stringand if you want to check whether a sentence is ahello, you can do the following.
input_condition: m.data == 'hello'
If you want to check the frame id of the header, you can do the following.
input1_condition: m.header.frame_id in ['base', 'base_link']
For example, to prevent shutdown while the real Fetch is charging, write as follows.
input_condition: 'm.is_charging is False'
In this case, the ~input is the /battery_state (power_msgs/BatteryState) topic.
power_msgs/BatteryState has the following values and is_charging is True if charging, False otherwise.
$ rosmsg show power_msgs/BatteryState
string name
float32 charge_level
bool is_charging
duration remaining_time
float32 total_capacity
float32 current_capacity
float32 battery_voltage
float32 supply_voltage
float32 charger_voltage
Note that, use escape sequence when using the following symbols <(<), >(>), &(&), '(') and "(").
Usage
# Launch node
$ su [sudo user] -c ". [setup.bash]; rosrun jsk_robot_startup shutdown.py"
# To shutdown robot
rostopic pub /shutdown std_msgs/Empty
# To restart robot
rostopic pub /reboot std_msgs/Empty
scripts/smach_to_mail.py
This node sends smach messages to /email, /tweet, etc… to notify robot state transition.
flowchart TB
subgraph S[Demo Code Running on SMACH]
START --> State_1
State_1 --> State_2
State_2 --> END
end
subgraph E[SMACH To Notification]
id1[(state list<br>DESCRIPTION / IMAGE<br>DESCRIPTION / IMAGE<br>...)]
id1 --> email[[pub /email jsk_robot_startup::Email]]
id1 --> tweet[[pub /tweet std_msgs::String]]
id1 --> chat[[pub /google_chat_ros/send/goal<br>google_chat_ros::SendMessageAction]]
end
S -->|"[{'DESCRIPTION': string, 'IMAGE': base64}]"| E
email --> email_body(["DESCRIPTION[0]<br>DESCRIPTION[1]<br>IMAGE[1]<br>DESCRIPTION[1]<br>IMAGE[1]<br>..."])
tweet --> tweet_body1(["DESCRIPTION[0]"])
tweet_body1 --> tweet_body2(["DESCRIPTION[1]<br>IMAGE[1]"])
tweet_body2 --> tweet_body3(["DESCRIPTION[2]<br>IMAGE[2]"])
chat --> chat_body1(["DESCRIPTION[0]"])
chat_body1 --> chat_body2(["DESCRIPTION[1]<br>IMAGE[1]"])
chat_body2 --> chat_body3(["DESCRIPTION[2]<br>IMAGE[2]"])
Subscribing Topics
-
~smach/container_status(smach_msgs/SmachContainerStatus)Input topic smach status
Publishing Topics
-
/email(jsk_robot_startup/Email)Email message with description and image
-
/tweet(std_msgs/String)Tweet message with description and image
-
/google_chat_ros/send/goal(google_chat_ros/SendMessageActionGoal)Send google chat message with description and image.
Parameters
-
~sender_address(String)Sender address
-
~receiver_address(String)Receiver address
-
~google_chat_space(String)Receiver Google Chat space name
-
~google_chat_tmp_image_dir(String)Directory where images are temporarily stored for google_chat_ros
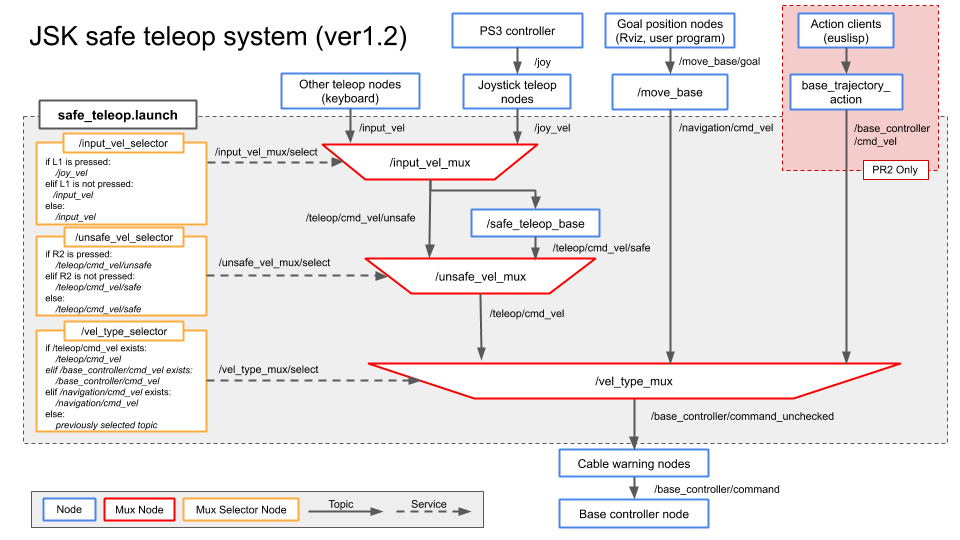
launch/safe_teleop.launch
This launch file provides a set of nodes for safe teleoperation common to mobile robots. Robot-specific nodes such as /joy, /teleop or /cable_warning must be included in the teleop launch file for each robot, such as safe_teleop.xml for PR2 or safe_teleop.xml for fetch.
launch/rfcomm_bind.launch
This script binds rfcomm device to remote bluetooth device. By binding rfcomm device, we can connect bluetooth device via device file (e.g. /dev/rfcomm1). For example, rosserial with this PR can be used over bluetooth connection.
Usage
Save the bluetooth device MAC address to file like /var/lib/robot/rfcomm_devices.yaml.
- name: device1
address: XX:XX:XX:XX:XX:XX
- name: device2
address: YY:YY:YY:YY:YY:YY
Then, bind rfcomm devices.
roslaunch jsk_robot_startup rfcomm_bind.launch
To check how many devices are bound to rfcomm, use rfcomm command.
rfcomm
Tips
Configuring a smtp server with Gmail
- Setting postfix
Add following codes to /etc/postfix/main.cf
relayhost = smtp.gmail.com:587
smtp_sasl_auth_enable = yes
smtp_sasl_password_maps = hash:/etc/postfix/gmail_passwd
smtp_sasl_security_options = noanonymous
smtp_sasl_mechanism_filter = plain
smtp_use_tls = yes
- Create and register a password file
Create /etc/postfix/gmail_passwd
# /etc/postfix/gmail_passwd
smtp.gmail.com:587 <example>@gmail.com:<login password or application password>
Register /etc/postfix/gmail_passwd
$ sudo postmap /etc/postfix/gmail_passwd
If you find /etc/postfix/gmail_passwd.db, it works well.
- Reload postfix
$ sudo postfix reload
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
- Contributors: Yuki Furuta, Iori Kumagai, Kanae Kochigami, Kei Okada, Kohei Kimura, Masahiro Bando, leus, Satoshi Otsubo
1.0.6 (2016-06-17)
- [jsk_robot_startup] Define publisher before callback definition (#615)
- Combine EKF and GPF for more constant odometry output
(#617)
- [jsk_robot_startup] Add script for odometry calculation with combination of EKF and GPF
- [jsk_robot_startup] Fix some misses
- [jsk_robot_startup] Use ekf+gpf odometry instead of particle odometry and thus iir filter is no longer used
- [jsk_robot_startup] Tune jaxon_red odometry param
- [jsk_robot_startup] add multisense_local.launch
- Use only important partilces when estimating output distribution of
particle odom
(#601)
- [jsk_robot_startup] Use only important particles to guess output distribution
- [jsk_robot_startup] Rename parameter name for valid particles
- [jsk_robot_startup] Use 1/3 particles for estimate normal distribution and make initial distribution narrower
- [jsk_robot_startup] Rename value name to match with rosparam name
- [jsk_robot_startup] Add comments
- activate_user.l : fix for non pr2 robot, see #589 (#590)
- [jsk_robot_startup] Add jsk_recognition_msgs to dependency because of histgram msgs
- [jsk_robot_startup] Fix typo
- [jsk_robot_startup] Add publish_histogram option to visualize particles
- [jsk_robot_startup] Use parameter_yaml arg instead of ROBOT environmental value for odometry params
- [jsk_robot_startup] Tune z direction parameter for JAXON_RED odometry
- Contributors: Iori Kumagai, Kei Okada, Yohei Kakiuchi
1.0.5 (2016-04-18)
- [jsk_robot_startup] Use robot_center_pointcloud_bbox_clipped as input for octomap server
- Contributors: leus
1.0.4 (2016-03-21)
- [jsk_robot_startup] Overwrite pdf threshould was too small: 1e-6->1e-3
- Contributors: Iori Kumagai
1.0.3 (2016-03-05)
- jsk_robot_startup/lifelog: fix #259 rename mongod_watcher.py -> mongod_kill_watcher.py
- [jsk_robot_startup] Tune cutoff freq for iir filter in JAXON_RED
- [jsk_robot_startup] Adjust filter rate to 40Hz, which is same as raw particle_odometry rate
- [jsk_robot_startup] Rename node of IIRFilter
- [jsk_robot_startup] Fix some bags in IIRFilter
- [jsk_robot_startup] Apply iir filter to particle odometry to improve stability of map
- Contributors: Kei Okada, Iori Kumagai
1.0.2 (2016-02-14)
- [jsk_robot_startup] Make distribution more larger in x and y in JAXON_RED
- [jsk_robot_startup] Use prev_rpy to prevent orientation jump at around 180[deg]. This approach may not work at singular points because it only consider arctan/arcsin uncertainty
- [jsk_robot_startup] theta + pi is not same pose as theta
- [jsk_robot_startup] Consider previous euler angle in transform_quaternion_to_euler, but this solution is temporal
- [jsk_robot_startup] Automatically clear octomap when robot stands on the ground
- [jsk_robot_startup] Add octomap launch using slam Added:
- jsk_robot_common/jsk_robot_startup/launch/slam_octomap.launch
- [jsk_robot_startup] Update yaw rotation sigma for ignoring stopping state model
- [jsk_robot_startup] Remove / from tf frame name which is not supported by tf2
- [jsk_robot_startup] Make distribution larger to make estimation more robust to pose
- [jsk_robot_startup] Also fix old version odometry param definitions in defaut_odometry_params.yaml
- [jsk_robot_startup] Tune HRP2JSKNT odometry params
- [jsk_robot_startup] Fix default and min/max values in OdometryOffsetReconfigure
- [jsk_robot_startup] Fix odometry param definitions for HRP2JSKNT which was a old version
- [jsk_robot_startup] Use odom_init_transform from footcoords instead of HrpsysSeqStateROSBridge
- [jsk_robot_startup] Fix frame_id of imu_rootlink to base_link
- [jsk_robot_startup] Add ImuRootlinkCalculator, calculate base_link relative imu orientation for ParticleOdometry to be compatible with HrpsysSeqStateROSBridge
- [jsk_robot_startup] It seems that transformations in tfMessage needs to be sorted by timestamp
- [jsk_robot_startup] Use original publisher for tfMessage because tf.broadcaster cannot receive transformation msg list
- [jsk_robot_startup] Put broadcast_tf function together in execute function to reduce tf rate
- [jsk_robot_startup] Configure odometry parameters for JAXON_RED
- [jsk_robot_startup] Publish slam_odom topic because transformations of odometry topics are already separated into /localization/tf
- [jsk_robot_startup] Fix bag in stop condicion check when overwrite pdf
- [jsk_robot_startup] Output base_link->pointcloud_scan transform to /tf for simualted scan
- [jsk_robot_startup] Remap /tf to /tf_null to reduce unnecessary tf
- [jsk_robot_startup] Fix topic name bugs and remap bags
- [jsk_robot_startup] Separate odometry transform and make only one broadcaster
- [jsk_robot_startup] Use odom_init_transform from HrpsysSeqStateROSBridge
- [jsk_robot_startup] Use imu_rootlink, base_link_frame relative imu orientation
- [jsk_robot_startup] Use calculate_init_to_base_link_transform as initial transform of odometry_offset and particle odometry
- [jsk_robot_startup] Add node to calculate odom_init->base_link transform using odom->base_link and odom->odom_init topics without tf
- [jsk_robot_startup] publish slam_odom only when use_slam_feedback is true
- [jsk_robot_startup] Fix launch remaps and params for new offset calculation
- [jsk_robot_startup] Remove tf listener and use odometry and transformation topics in offset calculation
- [jsk_robot_startup] Remove unnecessary groups in biped_localization.launch
- [jsk_robot_startup] Remove transform listener in feedback wrapper which is no longer needed
- [jsk_robot_startup] forgot import broadcast_transform in ParticleOdometry
- [jsk_robot_startup] Twist proportional sigma option should be processed by individual class, not common utils
- [jsk_robot_startup] Remove twist_proportional_sigma from OdometryFeedbackWrapper
- [jsk_robot_startup] Trust stopping status when mean offset is accumulated to twist in OdometryOffset
- [jsk_robot_startup] Fix import bug of CameraToBaseOffset
- [jsk_robot_startup] Set default publish_tf as False in unnecessary tfs and do not make broadcast when publish_tf is false
- [jsk_robot_startup] Update default odometry paremeter set to overwrite viso covariance in OdometryOffset
- [jsk_robot_startup] Use common odometry utilities in ParticleOdometry
- [jsk_robot_startup] Put odometry calculation together in OdometryOffset and OdometryFeedbackWrapper is only calculate feedback
- [jsk_robot_startup] Fix bags related to feedback wrapper and odoemtry utils
- [jsk_robot_startup] Remove lookup transforms using odometry topic information
- [jsk_robot_startup] Separate commonly used utilities for odometry calculation
- [jsk_robot_startup] Remove use_imu option from launch files and describe in config file
- [jsk_robot_startup] Fix calculation for initial offset of viso camera offset to reduce linalg.inv
- [jsk_robot_startup] Fix calculation for imu rotation and modify base coordinate from base_link to odom
- [jsk_robot_startup] Calculate imu rotation when imu coordinate is not same as global
- [jsk_robot_startup] Initialize imu buffer in __init_ for ParticleOdometry
- [jsk_robot_startup] Tune odometry parameters for JAXON using calculate_covariance option
- [jsk_robot_startup] Trust stop state in covariance calculation in OdometryOffset when twist_proportional_sigma is false
- [jsk_robot_startup] Preserve odometry information when calculate_covarinace is True
- [jsk_robot_startup] Add options to overwrite covariance in odometry_offset
- [jsk_robot_startup] Adjust timestamp for viso offset calculation in camera_to_base_offset
- [jsk_robot_startup] Fix camera offset calculation
- [jsk_robot_startup] Add offset script to compensate camera motion relative to base_link in viso
- [jsk_robot_startup] Add jaxon odometry parameter files
- [jsk_robot_startup/lifelog/mongodb_local.launch] add launch file for local mongodb
- [jsk_robot_startup] Tune filter and viso parameters for HRP2JSKNT
- [jsk_robot_startup] Enable twist filter in HRP2JSKNT
- [jsk_robot_startup] fix fogotten Vector3 import
- [jsk_robot_startup] Remove source_skip_dt of ParticleOdometry and implement median filter in OdometryOffset
- [jsk_robot_startup] Add source_skip_dt for HRP2JSKNT
- [jsk_robot_startup] Tune robot specific params for HRP2JSKNT
- [jsk_robot_startup] Separate parameter config file from launch to tune robot specific params
- [jsk_robot_startup] Pass soruce_odom without dt check when source_odom is not initialized
- [jsk_robot_startup] Add source_skip_dt to detect and skip stacked odometry
- [jsk_robot_startup] Update twist covariance in calculate odometry for feedback wrapper
- {jsk_pr2_robot, jsk_robot_startup}/README.md: fix section/subsection
- [jsk_robot_startup] Rewrite weighted gaussian covariance estimation using numpy to speed up
- README.md: fix section/subsection
- [jsk_robot_startup] numpy was more efficient in average and covairance calculation, but weighted cov is supported from numpy 1.10
- [jsk_robot_startup] Calculate weighted mean and covariance directly, not through numpy
- [jsk_robot_startup] Calculate inverse matrix for norm_pdf_multivariate before weighting
- Merge branch 'speed-up-particle-odometry' of http://github.com/orikuma/jsk_robot into speed-up-particle-odometry
- [jsk_robot_startup] Replace tf.transformations.euler_from_quaternion to transform_quaternion_to_euler
- [jsk_robot_startup] sampling number of multivariate_normal should be integer
- [jsk_robot_startup] Call multivariate_normal once in sampling
- [jsk_robot_startup] stereo_namespace is no longer used in particle_odometry because viso is separated
- [jsk_robot_startup] Pass update when global twist cannot be calcluated because of tf problem
- [jsk_robot_startup] Separate viso from particle_odometry.launch
- [jsk_robot_startup] Modify constant height for slam through rqt_reconfigure
- [jsk_robot_startup] Add height options for slam_laser_scan
- [jsk_robot_startup] Fix forgotten subst_value in rosparam of slam_odom_scan_distance_filtered
- [jsk_robot_startup] Add stereo_namespace for viso to set multisense prefix
- [jsk_robot_startup] Separate laser nodelets for slam to reuse in other system
- Merge pull request #490 from orikuma/closed-loop-slam-odom-system [jsk_robot_startup] Add launch file to launch full SLAM and odometry system for biped robot
- [jsk_robot_startup] Add option to toggle setting multisense_laser options and using slam feedback
- [jsk_robot_startup] Add use_salm_feedback option to particle_odometry.launch to select standalone odometry or slam combination
- [jsk_robot_startup] Add full launch file for localization, which has integrate slam laser pointcloud parameters from multisense_local.launch of robots
- [jsk_robot_startup] Fix source_odom of viso feedbackwrapper: viso_odom->viso_odom_offset and make update rate from 50 to 100 instead of particles 50 to 20.
- [jsk_robot_startup] Add options for gmapping: iterations, lsigma, temporal_update and map_update_interval. defaults are same as gmapping default.
- [jsk_robot_startup] Add range_max option to determine simulated laser_scan range
- [jsk_robot_startup] Move viso_gaussian_point_cloud to use_ekf block
- [jsk_robot_startup] Broadcast /biped_odom_particle as parent of init_odom
- [jsk_robot_startup] Add OdomDiffTransformPublisher to broadcast tf as difference of target and intermediate frame
- [jsk_robot_startup] Enable map infromation feedback and modify some parameters for particle odometry
- [jsk_robot_startup] Add script to convert map information from slam to odometry msg
- [jsk_robot_startup] Time feedback is prevented when max_feedback_time <= 0
- [jsk_robot_startup] Normalize quaternion and fix matrix for quaternion integration
- [jsk_robot_startup] Use direct diviasion as same as particle odometry in odometry feedback wrapper
- [jsk_robot_startup] Use quaternion diviasion directly instead of using euler angle
- [jsk_robot_startup] Add some comments
- [jsk_robot_startup] Add odometry_offset to odometry_integration.launch
- [jsk_robot_startup] Update rate of particle odometries
- [jsk_robot_startup] Add queue_size option
- [jsk_robot_startup] Fix parameters for particle odometry
- [jsk_robot_startup] Add distribution_feedback_minimum_sigma, limit minimum sigma for check distribution error and do not execute feedback when feedback_odom has too small distribution
- [jsk_robot_startup] Fix offset calculation: wrong multipling homogeneous matrix order
- [jsk_robot_startup] Add use_imu_yaw option
- [jsk_robot_startup] Add comment
- [jsk_robot_startup] delegate offset calculation to OdometryOffset.py
- [jsk_robot_startup] Calculate transformation instead of integrate velocity in feedback wrapper
- [jsk_robot_startup] Use odometry feedback to prevent drift of viso
- [jsk_robot_startup] Integrate odometry when odometry feedback is enabled
- [jsk_robot_startup] Resume trapezoidal odometry integration and add init_sigma param
- Contributors: Yuki Furuta, Kei Okada, Kohei Kimura, Ryohei Ueda, Iori Kumagai
1.0.1 (2015-11-19)
- [jsk_robot_startup] Fix namespace of param for pointcloud_to_laserscan
- Contributors: Eisoku Kuroiwa
1.0.0 (2015-11-06)
0.0.13 (2015-11-06)
- [jsk_robot_startup] Add scripts to caclulate odometry with particle filter to integrate odometries (from pattern generator or visual odometry etc) and imu
- [jsk_robot_startup] Add script to set offset from a frame (like init_odom) to odometry source
- Contributors: Iori Kumagai
0.0.12 (2015-11-06)
- [jsk_robot_startup/lifelog/mongodb.launch] use machine attribute for mongodb server/client ref: https://github.com/strands-project/mongodb_store/pull/151
- [jsk_robot_startup] Modify pose difference threshould from sigma to 3*sigma
- [jsk_robot_startup] Rename twist_proportional_covariance to twist_proportional_sigma for accuracy
- [jsk_robot_startup] Add twist proportional sigma option to odometry feedback wrapper
- [db_client] add machine option for mongodb client
- [jsk_robot_startup] Fix timestamp problem of transform and odom in feedback process
- [jsk_robot_startup] use deepcopy instead of copy because coipy method copies reference of object members
- [jsk_robot_startup] Reset odometry buffer when initialize_odometry
- [jsk_robot_startup] Remove unnecessary lock in initialize
- [jsk_robot_startup] Prevent dead lock in initialize_odometry
- [jsk_robot_startup] Initialize odometry using odom_init_frame in tf instead of init_odom topic
- [jsk_robot_startup] Add init_signal subscriber to catch contact signal to ground and reset odometry wrapper
- [jsk_robot_startup] Revert calculation of orientation, which is probably deleted by mistake
- [jsk_robot_startup] Modify parameters for real robot
- [jsk_robot_startup] Fix description of integration
- [jsk_robot_startup] Modify integration method from rectangular to trapezoidal, and add prev_global_twist as argument of update_pose
- [jsk_robot_startup] Extend queue_size from 1 to 100
- [jsk_robot_startup] Modify ref_frame_change_method parameter from 0 to 1 to prevent drift in viso
- [jsk_robot_startup] Add init_odom to indicate initialize soruce of odom
- [jsk_robot_startup] Update documents for ConstantHeightFramePublisher
- [jsk_robot_startup] Add arguments to select odom frame name of ConstantHeightFramePublisher
- [jsk_robot_startup] Fix typo in error warning
- [jsk_robot_startup] Print warning when faield to solve tf
- [jsk_robot_startup] Pass odom frame name as rosparam in ConstantHeightFramePublisher
- [jsk_robot_startup] Add script to integrate odometry soruce
- [jsk_robot_startup] Add wrapper script to odometry feedback
- [jsk_robot_startup/lifelog/periodic_replicator_client.py] cancel replication when no wired network connection
- [jsk_robot_startup] Add args to determine frame name of odom and map to gmapping
- [jsk_robot_startup] Add invert_viso_tf option to use invert_tf of viso, which is invert parent and child of viso_odom transformation
- [jsk_robot_startup/lifelog/periodic_replicator_client.py] fix fetching argument
- [jsk_robot_startup] Respawn viso to restart by rosnode kill
- [jsk_robot_startup] Add args to remap image topic name for viso
- [jsk_robot_startup/lifelog/tweet.launch] use image_saver instead of extract_images for tweeting with image
- [jsk_robot_startup] add jenkins/musca to database replication node
- Contributors: Yuki Furuta, Iori Kumagai
0.0.11 (2015-09-01)
- [jsk_robot_startup] Add visualization node for viso odom_combined
- [jsk_robot_startup] Add viso.launch for visual odometry
- Contributors: Iori Kumagai
0.0.10 (2015-08-16)
- [jsk_robot_startup] fix camera namespace openni -> kinect_head
- [jsk_robot_startup] Add odometry accuracy parameters for gmapping
- [jsk_robot_startup] Add scripts to reset slam and heightmap according to /odom_init_trigger topic
- [jsk_robot_startup] Add gmapping.rviz for gmapping.launch
- [jsk_robot_startup] Add delta/particle/minimum_score parameters for gmapping
- [jsk_robot_startup] use param "robot/name" [jsk_pr2_startup] use daemon mongod
- [jsk_robot_startup] Add rate param to modify tf publish rate and set 10.0 as defalut
- add run depend for mapping
- [jsk_robot_startup] Enable inf value in pointcloud_to_laserscan to prevent robot from obtaining wrong obstacles
- Contributors: Yuki Furuta, Ryohei Ueda, Yu Ohara, Iori Kumagai
0.0.9 (2015-08-03)
- [jsk_robot_startup] Modify node name of gmapping and pointcloud_to_laserscan
- [jsk_robot_startup] Add respawn to gmapping
- [jsk_robot_startup] Add angle_max and angle_min arguments to determine horizontal scan range
- [jsk_robot_startup] Fix x, y and yaw of pointcloud_toscan_base to parent, roll and pitch to /odom
- [jsk_robot_startup] Fix roll and pitch angle of cosntant height frame same as /odom
- [jsk_robot_startup] Add gmapping to run_depend
- [jsk_robot_startup] Add scripts and launch files for gmapping
- [jsk_robot_startup] support daemon mode mongod; enable replication to jsk robot-database
- Contributors: Iori Kumagai, Yuki Furuta
0.0.8 (2015-07-16)
0.0.7 (2015-06-11)
0.0.6 (2015-04-10)
0.0.5 (2015-04-08)
- [jsk_baxter_startup] update to add position diff paramter for tweet
- [jsk_baxter_startup] modify to prevent baxter.launch fail
- [jsk_robot_startup/package.xml: add diagnostic_msgs, pr2_mechanism_controllers, sensor_msgs to build dependencies
- [sk_robot_startup/CMakeLists.txt] update to set permission for installed script files
- [jsk_robot_startup] modfiy CMakeLists.txt to install jsk_robot_startup correctly
- [jsk_robot_startup/lifelog/active_user.l] repair tweet lifelog
- [jsk_robot_startup/lifelog/mongodb.launch] fix typo of option in launch
- [jsk_robot_startup/lifelog/mongodb.launch: add mongodb launch; mongod kill watcher
- Contributors: Yuki Furuta, Yuto Inagaki
0.0.4 (2015-01-30)
0.0.3 (2015-01-09)
0.0.2 (2015-01-08)
0.0.1 (2014-12-25)
- check joint state and set movep for odom disable robot
- Add sound when launching pr2.launch
- Say something at the end of pr2.launch
- move twitter related program to robot_common from jsk_pr2_startup
- add ros-info
- robot time signal
- add tweet.l, see jsk_nao_startup.launch for example
- repiar mongodb.launch
- repair mongodb.launch and add param
- add jsk_robot_common/jsk_robot_startup
- Contributors: Kanae Kochigami, Ryohei Ueda, Yuto Inagaki, Yusuke Furuta
Wiki Tutorials
Package Dependencies
System Dependencies
Launch files
- lifelog/test/simulate_lazy.launch
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/mongodb_local.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- apps/personal_use/personal_use.xml
- apps/check_use_sim_time/check_use_sim_time.xml
Services
Plugins
Recent questions tagged jsk_robot_startup at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-01 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Yuki Furuta
Authors
jsk_robot_startup
lifelog
scripts/email_topic.py
This node sends email based on received rostopic (jsk_robot_startup/Email).
Default values can be set by using ~email_info
There is a client library and sample program.
If you want to see a demo. Please configure a smtp server and setup your email_info yaml at /var/lib/robot/email_info.yaml and run.
roslaunch jsk_robot_startup sample_email_topic.launch receiver_address:=<a mail address to send a mail to>
Parameters
-
~email_info(type:String, default:/var/lib/robot/email_info.yaml)
Default values of email configuration. Example of a yaml file is below.
subject: hello
body: world
sender_address: hoge@test.com
receiver_address: fuga@test.com
smtp_server: test.com
smtp_port: 25
attached_files:
- /home/user/Pictures/test.png
Subscriber
-
email(type:jsk_robot_startup/Email)
Subscriber of email command.
scripts/ConstantHeightFramePublisher.py
This script provides a constant height frame from the ground to get a imagenary laser scan for pointcloud_to_laserscan package. Biped robots need to use this constant frame to get constant laser scan for 2D SLAM package for wheeled ones like gmapping, because the pose of biped robots including height of the base link changes during a task in contrast to wheeled ones. In this frame, x, y and yaw is same as base frame of the robot body, z is constant and roll and pitch is same as the ground.
Parameters
-
~parent_frame(String, default: “BODY”)This parameter indicates the parent frame of the constant height frame, which is expected to be a base frame of the robot body.
-
~odom_frame(String, default: “odom”)This parameter indicates the odometry frame on the ground.
-
~frame_name(String, default: “pointcloud_to_scan_base”)This parameter indicates the name of the constant frame.
-
~rate(Double, default: 10.0)This parameter indicates publish rate [Hz] of the constant frame.
-
~height(Double, default: 1.0)This parameter indicates initial height [m] of the constant frame.
Subscribing Topics
-
~height(std_msgs/Float64)This topic modifies height [m] of the constant frame.
util/initialpose_publisher.l
This script sets initial pose with relative pose from specified TF frame by publishing /initialpose.
Parameters
-
~transform_base(String, default: “map”)TF frame of publishing topic
/initialpose. -
~transform_frame(String, default: “eng2/7f/73B2”)Base TF frame to calcurate relative initial pose
-
~initial_pose_x(Double, default: 0.0)Relative pose x
-
~initial_pose_y(Double, default: 0.0)Relative pose y
-
~initial_pose_yaw(Double, default: 0.0)Relative pose yaw
Subscribing Topics
-
/amcl_pose(geometry_msgs/PoseWithcovariancestamped)
util/mux_selector.py
This node check and select mux input topic on condition of the specified topic.
This node takes three arguments for one topic.
The first one is the topic to be monitored.
When a message from this topic is received, it is assigned as a variable m.
If a condition specified as the second argument,
this node calls a service to select the topic specified as the third argument.
Usage
rosrun jsk_robot_startup mux_selector.py /joy1 'm.buttons[9]==1' /cmd_vel1 /joy2 'm.buttons[9]==1' /cmd_vel2
Parameters
-
~patient(Double, default: 0.5)Indicates the allowable range of the difference between the received topic time and the current time.
-
~frequency(Double, default: 20.0)Frequency of processing loop.
-
~default_select(String, default:None)Default topic name.
-
~wait(Bool, default:False)If wait is
True, this node waits for the topic to be received.
Subscribing Topics
The topic specified in the argument is subscribed.
scripts/check_room_light.py
This node publish the luminance calculated from input image and room light status.
Subscribing Topics
-
~input(sensor_msgs/Imageorsensor_msgs/CompressedImage)Input topic image
Publishing Topics
-
~output(jsk_robot_startup/RoomLight)Room light status and room luminance
Parameters
-
~luminance_threshold(Float, default: 50)Luminance threshold to deteremine whether room light is on or off
-
~image_transport(String, default: raw)Image transport hint.
scripts/shutdown.py
This node shuts down or reboots the robot itself according to the rostopic. Note that this node needs to be run with sudo privileges.
Subscribing Topics
-
shutdown(std_msgs/Empty)Input topic that trigger shutdown.
If
~input_conditionis set, evaluated~input_conditionisTrueand this node received this topic, shutdown will be executed.If you want to force a shutdown in any case, set
~input_conditiontoNoneand sendshutdowntopic. -
reboot(std_msgs/Empty)Input topic that trigger reboot
-
~input(AnyMsg)Input ros message for
~input_condition.
Parameters
-
~shutdown_command(String, default: “/sbin/shutdown -h now”)Command to shutdown the system. You can specify the shutdown command according to your system.
-
~reboot_command(String, default: “/sbin/shutdown -r now”)Command to reboot the system. You can specify the reboot command according to your system.
-
~input_condition(String, default:None)Specify condition to run
~shutdown_commandeven if shutdown topic is received. Use a Python expression that returns a bool value. In addition to a Python builtin functions, you can usetopic(the topic of the message),m(the message) andt(time of message).For example,
~inputtopic isstd_msgs/Stringand if you want to check whether a sentence is ahello, you can do the following.
input_condition: m.data == 'hello'
If you want to check the frame id of the header, you can do the following.
input1_condition: m.header.frame_id in ['base', 'base_link']
For example, to prevent shutdown while the real Fetch is charging, write as follows.
input_condition: 'm.is_charging is False'
In this case, the ~input is the /battery_state (power_msgs/BatteryState) topic.
power_msgs/BatteryState has the following values and is_charging is True if charging, False otherwise.
$ rosmsg show power_msgs/BatteryState
string name
float32 charge_level
bool is_charging
duration remaining_time
float32 total_capacity
float32 current_capacity
float32 battery_voltage
float32 supply_voltage
float32 charger_voltage
Note that, use escape sequence when using the following symbols <(<), >(>), &(&), '(') and "(").
Usage
# Launch node
$ su [sudo user] -c ". [setup.bash]; rosrun jsk_robot_startup shutdown.py"
# To shutdown robot
rostopic pub /shutdown std_msgs/Empty
# To restart robot
rostopic pub /reboot std_msgs/Empty
scripts/smach_to_mail.py
This node sends smach messages to /email, /tweet, etc… to notify robot state transition.
flowchart TB
subgraph S[Demo Code Running on SMACH]
START --> State_1
State_1 --> State_2
State_2 --> END
end
subgraph E[SMACH To Notification]
id1[(state list<br>DESCRIPTION / IMAGE<br>DESCRIPTION / IMAGE<br>...)]
id1 --> email[[pub /email jsk_robot_startup::Email]]
id1 --> tweet[[pub /tweet std_msgs::String]]
id1 --> chat[[pub /google_chat_ros/send/goal<br>google_chat_ros::SendMessageAction]]
end
S -->|"[{'DESCRIPTION': string, 'IMAGE': base64}]"| E
email --> email_body(["DESCRIPTION[0]<br>DESCRIPTION[1]<br>IMAGE[1]<br>DESCRIPTION[1]<br>IMAGE[1]<br>..."])
tweet --> tweet_body1(["DESCRIPTION[0]"])
tweet_body1 --> tweet_body2(["DESCRIPTION[1]<br>IMAGE[1]"])
tweet_body2 --> tweet_body3(["DESCRIPTION[2]<br>IMAGE[2]"])
chat --> chat_body1(["DESCRIPTION[0]"])
chat_body1 --> chat_body2(["DESCRIPTION[1]<br>IMAGE[1]"])
chat_body2 --> chat_body3(["DESCRIPTION[2]<br>IMAGE[2]"])
Subscribing Topics
-
~smach/container_status(smach_msgs/SmachContainerStatus)Input topic smach status
Publishing Topics
-
/email(jsk_robot_startup/Email)Email message with description and image
-
/tweet(std_msgs/String)Tweet message with description and image
-
/google_chat_ros/send/goal(google_chat_ros/SendMessageActionGoal)Send google chat message with description and image.
Parameters
-
~sender_address(String)Sender address
-
~receiver_address(String)Receiver address
-
~google_chat_space(String)Receiver Google Chat space name
-
~google_chat_tmp_image_dir(String)Directory where images are temporarily stored for google_chat_ros
launch/safe_teleop.launch
This launch file provides a set of nodes for safe teleoperation common to mobile robots. Robot-specific nodes such as /joy, /teleop or /cable_warning must be included in the teleop launch file for each robot, such as safe_teleop.xml for PR2 or safe_teleop.xml for fetch.
launch/rfcomm_bind.launch
This script binds rfcomm device to remote bluetooth device. By binding rfcomm device, we can connect bluetooth device via device file (e.g. /dev/rfcomm1). For example, rosserial with this PR can be used over bluetooth connection.
Usage
Save the bluetooth device MAC address to file like /var/lib/robot/rfcomm_devices.yaml.
- name: device1
address: XX:XX:XX:XX:XX:XX
- name: device2
address: YY:YY:YY:YY:YY:YY
Then, bind rfcomm devices.
roslaunch jsk_robot_startup rfcomm_bind.launch
To check how many devices are bound to rfcomm, use rfcomm command.
rfcomm
Tips
Configuring a smtp server with Gmail
- Setting postfix
Add following codes to /etc/postfix/main.cf
relayhost = smtp.gmail.com:587
smtp_sasl_auth_enable = yes
smtp_sasl_password_maps = hash:/etc/postfix/gmail_passwd
smtp_sasl_security_options = noanonymous
smtp_sasl_mechanism_filter = plain
smtp_use_tls = yes
- Create and register a password file
Create /etc/postfix/gmail_passwd
# /etc/postfix/gmail_passwd
smtp.gmail.com:587 <example>@gmail.com:<login password or application password>
Register /etc/postfix/gmail_passwd
$ sudo postmap /etc/postfix/gmail_passwd
If you find /etc/postfix/gmail_passwd.db, it works well.
- Reload postfix
$ sudo postfix reload
Changelog for package jsk_robot_startup
1.1.0 (2017-07-16)
- Enable safe teleop for fetch
(#801 )
- [jsk_fetch_startup] move unsafe_warning.l to jsk_robot_startup / enable unsafe_warning on fetch
- [jsk_pr2_startup] move mux_selector.py to jsk_robot_startup
- run active_user.l with 1hz (#787 )
- [jsk_robot_startup, multisense_local.launch] add USE_HEIGHTMAP parameter (#783 )
- [jsk_robot_startup] add record launch files for SLAM (#760)
- [jsk_robot_startup][mongodb.launch] pass through arg test_mode (#755)
- [jsk_robot_startup] Tuned odometry params for jaxon (#732)
- Contributors: Kei Okada, Yohei Kakiuchi, Yuki Furuta, Iori Kumagai
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- Merge pull request #672 from furushchev/move-logapp [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- [jsk_robot_startup] Fix imu_rootlink calculation bug
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_robot_startup] move initialpose_publisher.l from jsk_pr2_startup/jsk_pr2_move_base
- [jsk_robot_lifelog] move logging program from jsk_pr2_startup/jsk_pr2_lifelog to jsk_robot_startup/lifelog
- removed unnecessary packages from find_package in CMakeLists.txt
- [jsk_robot_startup] Rewrite ImuRootlinkCalculator using tf api functions to remove transformation bag
- [jsk_robot_startup] Add imu topic argument to localization launch files
- [jsk_robot_startup] Preserve compatibility in heightmap accumulation when USE_BIPED_LOCALIZATION is false
- Fix slam pointcloud accumulation
(#649)
- [jsk_robot_startup] Publish slam_odom continuously
- [jsk_robot_startup] Enable use_slam_feedback option
- [jsk_robot_startup] Fix slam_laser_nodelets name and use slam based pointcloud for heightmap
- [jsk_robot_startup] Use map as assemble_base_frame
- [jsk_robot_startup] Use standard normal distribution in yaw error weights
- [jsk_robot_startup] Use standard normal distribution for error weighting function to prevent too large weights when small sigma is given
- Apply ekf update in source odom callback
(#643)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Apply ekf_update in source_odom_callback and update twist and header in ekf_update
- Publish diagnostics in odometry
(#642)
- [jsk_robot_startup] Publish diagnostics for debug when publish odometry
- [jsk_robot_startup] Add node name to diagnostics status
- [jsk_robot_startup] Remap diagnostics topic to global
- [jsk_robot_startup] Make cov smaller when robot is stopping to trust stopping state (#641)
- [jsk_robot_startup] Add launch files for rtabmap
(#639)
- [jsk_robot_startup] Add launch files for rtabmap
- [jsk_robot_startup] Add respawn option to rtabmap
- [jsk_robot_common/jsk_robot_startup/util/start_launch_sound.py] PLAY_START -> PLAY_ONCE (#631)
- [jsk_robot_startup] Fix transformation from odom to map in slam_odom topic
- Prevent particle degeneration
(#629)
- [jsk_robot_startup] Run ekf_update only when dt > 0 (= source_odom is updated)
- [jsk_robot_startup] Move GPF process to measuremnt callback and add min_sampling_rate option
- [jsk_robot_startup] Tune JAXON_RED odometry params to prevent particle degeneration
- [jsk_robot_startup] Run sampling every time when min_sampling_rate is not larger than 0
- [jsk_robot_startup] Tune min_sampling_rate for JAXON_RED
- [jsk_robot_startup] Fix oodm_frame of biped_odom_particle when use_odometry_iir_filter is false (#626)
- [jsk_robot_startup/multisense_local.launch] Add biped_localization flag
- Contributors: Yuki Furuta, Iori Kumagai, Kanae Kochigami, Kei Okada, Kohei Kimura, Masahiro Bando, leus, Satoshi Otsubo
1.0.6 (2016-06-17)
- [jsk_robot_startup] Define publisher before callback definition (#615)
- Combine EKF and GPF for more constant odometry output
(#617)
- [jsk_robot_startup] Add script for odometry calculation with combination of EKF and GPF
- [jsk_robot_startup] Fix some misses
- [jsk_robot_startup] Use ekf+gpf odometry instead of particle odometry and thus iir filter is no longer used
- [jsk_robot_startup] Tune jaxon_red odometry param
- [jsk_robot_startup] add multisense_local.launch
- Use only important partilces when estimating output distribution of
particle odom
(#601)
- [jsk_robot_startup] Use only important particles to guess output distribution
- [jsk_robot_startup] Rename parameter name for valid particles
- [jsk_robot_startup] Use 1/3 particles for estimate normal distribution and make initial distribution narrower
- [jsk_robot_startup] Rename value name to match with rosparam name
- [jsk_robot_startup] Add comments
- activate_user.l : fix for non pr2 robot, see #589 (#590)
- [jsk_robot_startup] Add jsk_recognition_msgs to dependency because of histgram msgs
- [jsk_robot_startup] Fix typo
- [jsk_robot_startup] Add publish_histogram option to visualize particles
- [jsk_robot_startup] Use parameter_yaml arg instead of ROBOT environmental value for odometry params
- [jsk_robot_startup] Tune z direction parameter for JAXON_RED odometry
- Contributors: Iori Kumagai, Kei Okada, Yohei Kakiuchi
1.0.5 (2016-04-18)
- [jsk_robot_startup] Use robot_center_pointcloud_bbox_clipped as input for octomap server
- Contributors: leus
1.0.4 (2016-03-21)
- [jsk_robot_startup] Overwrite pdf threshould was too small: 1e-6->1e-3
- Contributors: Iori Kumagai
1.0.3 (2016-03-05)
- jsk_robot_startup/lifelog: fix #259 rename mongod_watcher.py -> mongod_kill_watcher.py
- [jsk_robot_startup] Tune cutoff freq for iir filter in JAXON_RED
- [jsk_robot_startup] Adjust filter rate to 40Hz, which is same as raw particle_odometry rate
- [jsk_robot_startup] Rename node of IIRFilter
- [jsk_robot_startup] Fix some bags in IIRFilter
- [jsk_robot_startup] Apply iir filter to particle odometry to improve stability of map
- Contributors: Kei Okada, Iori Kumagai
1.0.2 (2016-02-14)
- [jsk_robot_startup] Make distribution more larger in x and y in JAXON_RED
- [jsk_robot_startup] Use prev_rpy to prevent orientation jump at around 180[deg]. This approach may not work at singular points because it only consider arctan/arcsin uncertainty
- [jsk_robot_startup] theta + pi is not same pose as theta
- [jsk_robot_startup] Consider previous euler angle in transform_quaternion_to_euler, but this solution is temporal
- [jsk_robot_startup] Automatically clear octomap when robot stands on the ground
- [jsk_robot_startup] Add octomap launch using slam Added:
- jsk_robot_common/jsk_robot_startup/launch/slam_octomap.launch
- [jsk_robot_startup] Update yaw rotation sigma for ignoring stopping state model
- [jsk_robot_startup] Remove / from tf frame name which is not supported by tf2
- [jsk_robot_startup] Make distribution larger to make estimation more robust to pose
- [jsk_robot_startup] Also fix old version odometry param definitions in defaut_odometry_params.yaml
- [jsk_robot_startup] Tune HRP2JSKNT odometry params
- [jsk_robot_startup] Fix default and min/max values in OdometryOffsetReconfigure
- [jsk_robot_startup] Fix odometry param definitions for HRP2JSKNT which was a old version
- [jsk_robot_startup] Use odom_init_transform from footcoords instead of HrpsysSeqStateROSBridge
- [jsk_robot_startup] Fix frame_id of imu_rootlink to base_link
- [jsk_robot_startup] Add ImuRootlinkCalculator, calculate base_link relative imu orientation for ParticleOdometry to be compatible with HrpsysSeqStateROSBridge
- [jsk_robot_startup] It seems that transformations in tfMessage needs to be sorted by timestamp
- [jsk_robot_startup] Use original publisher for tfMessage because tf.broadcaster cannot receive transformation msg list
- [jsk_robot_startup] Put broadcast_tf function together in execute function to reduce tf rate
- [jsk_robot_startup] Configure odometry parameters for JAXON_RED
- [jsk_robot_startup] Publish slam_odom topic because transformations of odometry topics are already separated into /localization/tf
- [jsk_robot_startup] Fix bag in stop condicion check when overwrite pdf
- [jsk_robot_startup] Output base_link->pointcloud_scan transform to /tf for simualted scan
- [jsk_robot_startup] Remap /tf to /tf_null to reduce unnecessary tf
- [jsk_robot_startup] Fix topic name bugs and remap bags
- [jsk_robot_startup] Separate odometry transform and make only one broadcaster
- [jsk_robot_startup] Use odom_init_transform from HrpsysSeqStateROSBridge
- [jsk_robot_startup] Use imu_rootlink, base_link_frame relative imu orientation
- [jsk_robot_startup] Use calculate_init_to_base_link_transform as initial transform of odometry_offset and particle odometry
- [jsk_robot_startup] Add node to calculate odom_init->base_link transform using odom->base_link and odom->odom_init topics without tf
- [jsk_robot_startup] publish slam_odom only when use_slam_feedback is true
- [jsk_robot_startup] Fix launch remaps and params for new offset calculation
- [jsk_robot_startup] Remove tf listener and use odometry and transformation topics in offset calculation
- [jsk_robot_startup] Remove unnecessary groups in biped_localization.launch
- [jsk_robot_startup] Remove transform listener in feedback wrapper which is no longer needed
- [jsk_robot_startup] forgot import broadcast_transform in ParticleOdometry
- [jsk_robot_startup] Twist proportional sigma option should be processed by individual class, not common utils
- [jsk_robot_startup] Remove twist_proportional_sigma from OdometryFeedbackWrapper
- [jsk_robot_startup] Trust stopping status when mean offset is accumulated to twist in OdometryOffset
- [jsk_robot_startup] Fix import bug of CameraToBaseOffset
- [jsk_robot_startup] Set default publish_tf as False in unnecessary tfs and do not make broadcast when publish_tf is false
- [jsk_robot_startup] Update default odometry paremeter set to overwrite viso covariance in OdometryOffset
- [jsk_robot_startup] Use common odometry utilities in ParticleOdometry
- [jsk_robot_startup] Put odometry calculation together in OdometryOffset and OdometryFeedbackWrapper is only calculate feedback
- [jsk_robot_startup] Fix bags related to feedback wrapper and odoemtry utils
- [jsk_robot_startup] Remove lookup transforms using odometry topic information
- [jsk_robot_startup] Separate commonly used utilities for odometry calculation
- [jsk_robot_startup] Remove use_imu option from launch files and describe in config file
- [jsk_robot_startup] Fix calculation for initial offset of viso camera offset to reduce linalg.inv
- [jsk_robot_startup] Fix calculation for imu rotation and modify base coordinate from base_link to odom
- [jsk_robot_startup] Calculate imu rotation when imu coordinate is not same as global
- [jsk_robot_startup] Initialize imu buffer in __init_ for ParticleOdometry
- [jsk_robot_startup] Tune odometry parameters for JAXON using calculate_covariance option
- [jsk_robot_startup] Trust stop state in covariance calculation in OdometryOffset when twist_proportional_sigma is false
- [jsk_robot_startup] Preserve odometry information when calculate_covarinace is True
- [jsk_robot_startup] Add options to overwrite covariance in odometry_offset
- [jsk_robot_startup] Adjust timestamp for viso offset calculation in camera_to_base_offset
- [jsk_robot_startup] Fix camera offset calculation
- [jsk_robot_startup] Add offset script to compensate camera motion relative to base_link in viso
- [jsk_robot_startup] Add jaxon odometry parameter files
- [jsk_robot_startup/lifelog/mongodb_local.launch] add launch file for local mongodb
- [jsk_robot_startup] Tune filter and viso parameters for HRP2JSKNT
- [jsk_robot_startup] Enable twist filter in HRP2JSKNT
- [jsk_robot_startup] fix fogotten Vector3 import
- [jsk_robot_startup] Remove source_skip_dt of ParticleOdometry and implement median filter in OdometryOffset
- [jsk_robot_startup] Add source_skip_dt for HRP2JSKNT
- [jsk_robot_startup] Tune robot specific params for HRP2JSKNT
- [jsk_robot_startup] Separate parameter config file from launch to tune robot specific params
- [jsk_robot_startup] Pass soruce_odom without dt check when source_odom is not initialized
- [jsk_robot_startup] Add source_skip_dt to detect and skip stacked odometry
- [jsk_robot_startup] Update twist covariance in calculate odometry for feedback wrapper
- {jsk_pr2_robot, jsk_robot_startup}/README.md: fix section/subsection
- [jsk_robot_startup] Rewrite weighted gaussian covariance estimation using numpy to speed up
- README.md: fix section/subsection
- [jsk_robot_startup] numpy was more efficient in average and covairance calculation, but weighted cov is supported from numpy 1.10
- [jsk_robot_startup] Calculate weighted mean and covariance directly, not through numpy
- [jsk_robot_startup] Calculate inverse matrix for norm_pdf_multivariate before weighting
- Merge branch 'speed-up-particle-odometry' of http://github.com/orikuma/jsk_robot into speed-up-particle-odometry
- [jsk_robot_startup] Replace tf.transformations.euler_from_quaternion to transform_quaternion_to_euler
- [jsk_robot_startup] sampling number of multivariate_normal should be integer
- [jsk_robot_startup] Call multivariate_normal once in sampling
- [jsk_robot_startup] stereo_namespace is no longer used in particle_odometry because viso is separated
- [jsk_robot_startup] Pass update when global twist cannot be calcluated because of tf problem
- [jsk_robot_startup] Separate viso from particle_odometry.launch
- [jsk_robot_startup] Modify constant height for slam through rqt_reconfigure
- [jsk_robot_startup] Add height options for slam_laser_scan
- [jsk_robot_startup] Fix forgotten subst_value in rosparam of slam_odom_scan_distance_filtered
- [jsk_robot_startup] Add stereo_namespace for viso to set multisense prefix
- [jsk_robot_startup] Separate laser nodelets for slam to reuse in other system
- Merge pull request #490 from orikuma/closed-loop-slam-odom-system [jsk_robot_startup] Add launch file to launch full SLAM and odometry system for biped robot
- [jsk_robot_startup] Add option to toggle setting multisense_laser options and using slam feedback
- [jsk_robot_startup] Add use_salm_feedback option to particle_odometry.launch to select standalone odometry or slam combination
- [jsk_robot_startup] Add full launch file for localization, which has integrate slam laser pointcloud parameters from multisense_local.launch of robots
- [jsk_robot_startup] Fix source_odom of viso feedbackwrapper: viso_odom->viso_odom_offset and make update rate from 50 to 100 instead of particles 50 to 20.
- [jsk_robot_startup] Add options for gmapping: iterations, lsigma, temporal_update and map_update_interval. defaults are same as gmapping default.
- [jsk_robot_startup] Add range_max option to determine simulated laser_scan range
- [jsk_robot_startup] Move viso_gaussian_point_cloud to use_ekf block
- [jsk_robot_startup] Broadcast /biped_odom_particle as parent of init_odom
- [jsk_robot_startup] Add OdomDiffTransformPublisher to broadcast tf as difference of target and intermediate frame
- [jsk_robot_startup] Enable map infromation feedback and modify some parameters for particle odometry
- [jsk_robot_startup] Add script to convert map information from slam to odometry msg
- [jsk_robot_startup] Time feedback is prevented when max_feedback_time <= 0
- [jsk_robot_startup] Normalize quaternion and fix matrix for quaternion integration
- [jsk_robot_startup] Use direct diviasion as same as particle odometry in odometry feedback wrapper
- [jsk_robot_startup] Use quaternion diviasion directly instead of using euler angle
- [jsk_robot_startup] Add some comments
- [jsk_robot_startup] Add odometry_offset to odometry_integration.launch
- [jsk_robot_startup] Update rate of particle odometries
- [jsk_robot_startup] Add queue_size option
- [jsk_robot_startup] Fix parameters for particle odometry
- [jsk_robot_startup] Add distribution_feedback_minimum_sigma, limit minimum sigma for check distribution error and do not execute feedback when feedback_odom has too small distribution
- [jsk_robot_startup] Fix offset calculation: wrong multipling homogeneous matrix order
- [jsk_robot_startup] Add use_imu_yaw option
- [jsk_robot_startup] Add comment
- [jsk_robot_startup] delegate offset calculation to OdometryOffset.py
- [jsk_robot_startup] Calculate transformation instead of integrate velocity in feedback wrapper
- [jsk_robot_startup] Use odometry feedback to prevent drift of viso
- [jsk_robot_startup] Integrate odometry when odometry feedback is enabled
- [jsk_robot_startup] Resume trapezoidal odometry integration and add init_sigma param
- Contributors: Yuki Furuta, Kei Okada, Kohei Kimura, Ryohei Ueda, Iori Kumagai
1.0.1 (2015-11-19)
- [jsk_robot_startup] Fix namespace of param for pointcloud_to_laserscan
- Contributors: Eisoku Kuroiwa
1.0.0 (2015-11-06)
0.0.13 (2015-11-06)
- [jsk_robot_startup] Add scripts to caclulate odometry with particle filter to integrate odometries (from pattern generator or visual odometry etc) and imu
- [jsk_robot_startup] Add script to set offset from a frame (like init_odom) to odometry source
- Contributors: Iori Kumagai
0.0.12 (2015-11-06)
- [jsk_robot_startup/lifelog/mongodb.launch] use machine attribute for mongodb server/client ref: https://github.com/strands-project/mongodb_store/pull/151
- [jsk_robot_startup] Modify pose difference threshould from sigma to 3*sigma
- [jsk_robot_startup] Rename twist_proportional_covariance to twist_proportional_sigma for accuracy
- [jsk_robot_startup] Add twist proportional sigma option to odometry feedback wrapper
- [db_client] add machine option for mongodb client
- [jsk_robot_startup] Fix timestamp problem of transform and odom in feedback process
- [jsk_robot_startup] use deepcopy instead of copy because coipy method copies reference of object members
- [jsk_robot_startup] Reset odometry buffer when initialize_odometry
- [jsk_robot_startup] Remove unnecessary lock in initialize
- [jsk_robot_startup] Prevent dead lock in initialize_odometry
- [jsk_robot_startup] Initialize odometry using odom_init_frame in tf instead of init_odom topic
- [jsk_robot_startup] Add init_signal subscriber to catch contact signal to ground and reset odometry wrapper
- [jsk_robot_startup] Revert calculation of orientation, which is probably deleted by mistake
- [jsk_robot_startup] Modify parameters for real robot
- [jsk_robot_startup] Fix description of integration
- [jsk_robot_startup] Modify integration method from rectangular to trapezoidal, and add prev_global_twist as argument of update_pose
- [jsk_robot_startup] Extend queue_size from 1 to 100
- [jsk_robot_startup] Modify ref_frame_change_method parameter from 0 to 1 to prevent drift in viso
- [jsk_robot_startup] Add init_odom to indicate initialize soruce of odom
- [jsk_robot_startup] Update documents for ConstantHeightFramePublisher
- [jsk_robot_startup] Add arguments to select odom frame name of ConstantHeightFramePublisher
- [jsk_robot_startup] Fix typo in error warning
- [jsk_robot_startup] Print warning when faield to solve tf
- [jsk_robot_startup] Pass odom frame name as rosparam in ConstantHeightFramePublisher
- [jsk_robot_startup] Add script to integrate odometry soruce
- [jsk_robot_startup] Add wrapper script to odometry feedback
- [jsk_robot_startup/lifelog/periodic_replicator_client.py] cancel replication when no wired network connection
- [jsk_robot_startup] Add args to determine frame name of odom and map to gmapping
- [jsk_robot_startup] Add invert_viso_tf option to use invert_tf of viso, which is invert parent and child of viso_odom transformation
- [jsk_robot_startup/lifelog/periodic_replicator_client.py] fix fetching argument
- [jsk_robot_startup] Respawn viso to restart by rosnode kill
- [jsk_robot_startup] Add args to remap image topic name for viso
- [jsk_robot_startup/lifelog/tweet.launch] use image_saver instead of extract_images for tweeting with image
- [jsk_robot_startup] add jenkins/musca to database replication node
- Contributors: Yuki Furuta, Iori Kumagai
0.0.11 (2015-09-01)
- [jsk_robot_startup] Add visualization node for viso odom_combined
- [jsk_robot_startup] Add viso.launch for visual odometry
- Contributors: Iori Kumagai
0.0.10 (2015-08-16)
- [jsk_robot_startup] fix camera namespace openni -> kinect_head
- [jsk_robot_startup] Add odometry accuracy parameters for gmapping
- [jsk_robot_startup] Add scripts to reset slam and heightmap according to /odom_init_trigger topic
- [jsk_robot_startup] Add gmapping.rviz for gmapping.launch
- [jsk_robot_startup] Add delta/particle/minimum_score parameters for gmapping
- [jsk_robot_startup] use param "robot/name" [jsk_pr2_startup] use daemon mongod
- [jsk_robot_startup] Add rate param to modify tf publish rate and set 10.0 as defalut
- add run depend for mapping
- [jsk_robot_startup] Enable inf value in pointcloud_to_laserscan to prevent robot from obtaining wrong obstacles
- Contributors: Yuki Furuta, Ryohei Ueda, Yu Ohara, Iori Kumagai
0.0.9 (2015-08-03)
- [jsk_robot_startup] Modify node name of gmapping and pointcloud_to_laserscan
- [jsk_robot_startup] Add respawn to gmapping
- [jsk_robot_startup] Add angle_max and angle_min arguments to determine horizontal scan range
- [jsk_robot_startup] Fix x, y and yaw of pointcloud_toscan_base to parent, roll and pitch to /odom
- [jsk_robot_startup] Fix roll and pitch angle of cosntant height frame same as /odom
- [jsk_robot_startup] Add gmapping to run_depend
- [jsk_robot_startup] Add scripts and launch files for gmapping
- [jsk_robot_startup] support daemon mode mongod; enable replication to jsk robot-database
- Contributors: Iori Kumagai, Yuki Furuta
0.0.8 (2015-07-16)
0.0.7 (2015-06-11)
0.0.6 (2015-04-10)
0.0.5 (2015-04-08)
- [jsk_baxter_startup] update to add position diff paramter for tweet
- [jsk_baxter_startup] modify to prevent baxter.launch fail
- [jsk_robot_startup/package.xml: add diagnostic_msgs, pr2_mechanism_controllers, sensor_msgs to build dependencies
- [sk_robot_startup/CMakeLists.txt] update to set permission for installed script files
- [jsk_robot_startup] modfiy CMakeLists.txt to install jsk_robot_startup correctly
- [jsk_robot_startup/lifelog/active_user.l] repair tweet lifelog
- [jsk_robot_startup/lifelog/mongodb.launch] fix typo of option in launch
- [jsk_robot_startup/lifelog/mongodb.launch: add mongodb launch; mongod kill watcher
- Contributors: Yuki Furuta, Yuto Inagaki
0.0.4 (2015-01-30)
0.0.3 (2015-01-09)
0.0.2 (2015-01-08)
0.0.1 (2014-12-25)
- check joint state and set movep for odom disable robot
- Add sound when launching pr2.launch
- Say something at the end of pr2.launch
- move twitter related program to robot_common from jsk_pr2_startup
- add ros-info
- robot time signal
- add tweet.l, see jsk_nao_startup.launch for example
- repiar mongodb.launch
- repair mongodb.launch and add param
- add jsk_robot_common/jsk_robot_startup
- Contributors: Kanae Kochigami, Ryohei Ueda, Yuto Inagaki, Yusuke Furuta
Wiki Tutorials
Package Dependencies
System Dependencies
Launch files
- lifelog/test/simulate_lazy.launch
- lifelog/sample_image_logger.launch
-
- logging_rate [default: 1.0]
- launch_manager [default: false]
- image [default: /camera/rgb/image_rect_color]
- manager [default: image_logger_nodelet_manager]
- manager [default: /camera/camera_nodelet_manager]
- launch_mongodb [default: true]
- lifelog/mongodb_local.launch
- lifelog/tweet.launch
-
- robot_name [default: PR2]
- worktime_enable [default: true]
- uptime_enable [default: true]
- tablet_enable [default: true]
- warning_enable [default: true]
- motor_subscribe [default: true]
- odom_subscribe [default: true]
- joint_state_subscribe [default: true]
- position_diff_threshold [default: 0.05]
- remap_motor_state [default: /pr2_ethercat/motors_halted]
- remap_odom_state [default: /base_odometry/odometer]
- remap_joint_states [default: /joint_states]
- remap_diagnostics [default: /diagnostics]
- image_topics [default: /kinect_head/rgb/image_rect_color /wide_stereo/left/image_rect_color]
- machine [default: localhost]
- output [default: screen]
- account_info [default: /var/lib/robot/twitter_account_pr2jsk.yaml]
- lifelog/rwt_image_view.launch
-
- launch_roswww [default: false] — launch roswww server if true
- launch_websocket [default: false] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- roswww_port [default: 8000] — port number for roswww server
- machine [default: localhost]
- lifelog/common_logger.launch
-
- save_rgb [default: true]
- save_depth [default: true]
- save_tf [default: true]
- save_joint_states [default: true]
- save_speech [default: true]
- save_faces [default: true]
- save_dialogflow [default: true]
- save_google_chat [default: true]
- save_smach [default: true]
- save_base_trajectory [default: false]
- save_object_detection [default: false]
- save_action [default: false]
- save_app [default: true]
- camera_ns [default: kinect_head]
- rgb_ns [default: rgb]
- rgb_suffix [default: /compressed]
- depth_ns [default: depth_registered]
- depth_suffix [default: /compressedDepth]
- camera_info_topic [default: camera_info]
- rgb_topic [default: image_rect_color]
- depth_topic [default: image_rect]
- joint_states_topic [default: joint_states]
- base_frame_id [default: base_link]
- map_frame_id [default: eng2]
- localhost [default: true]
- machine
- machine [default: localhost]
- launch_manager [default: true]
- manager [default: mongodb_record_nodelet_manager]
- manager
- approximate_sync [default: true]
- enable_monitor [default: false]
- log_rate [default: 1.0]
- respawn [default: false]
- vital_check [default: true]
- vital_rate [default: 0.1]
- debug [default: false]
- launch-prefix [default: gdb -ex run --args]
- launch-prefix [default: ]
- lifelog/mongodb.launch
-
- db_path [default: /var/lib/robot/mongodb_store]
- port [default: 62345]
- repl_set_mode [default: false]
- use_daemon [default: false]
- db_name [default: jsk_robot_lifelog]
- machine [default: localhost]
- replicate [default: true]
- replicator_dump_path [default: /tmp/replicator_dumps]
- replicator_param_path [default: $(find jsk_robot_startup)/lifelog/mongodb_replication_params.yaml]
- test_mode [default: false]
- lifelog/app_manager.launch
-
- master [default: true] — launch master if enabled
- master_address [default: localhost] — address for app_manager master
- master_port [default: 11313] — port for app_manager master
- use_applist [default: false] — load apps from applist argument
- applist [default: ] — app dirs (space separated)
- launch_websocket [default: true] — launch rosbridge_websocket if true
- websocket_port [default: 9090] — port number for rosbridge_websocket server
- launch_roswww [default: true] — launch roswww server if true
- roswww_port [default: 8000] — port number for roswww server
- basic [default: false] — enable basic authentication
- basic_yaml [default: /var/lib/robot/roswww_basic_keys.yaml] — basic yaml file path
- remote [default: false] — set true with valid 'machine' argument
- machine [default: localhost]
- respawn [default: true]
- launch/rtabmap.launch
-
- use_rviz [default: false]
- use_stereo_odometry [default: true]
- use_rtabmap [default: true]
- odom_topic [default: /odom]
- base_frame_id [default: BODY]
- odom_frame_id [default: odom_init]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/quadruped_joystick_teleop.launch
-
- launch_joy_node [default: true]
- pad_type [default: dualshock3]
- joy_name_space [default: /]
- joy_dev [default: /dev/input/js0]
- joy_topic [default: /joy_$(arg pad_type)]
- cmd_vel_topic [default: $(arg joy_name_space)cmd_vel]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/$(arg pad_type)_joystick_teleop.yaml]
- dock_service [default: dock]
- tuck_service [default: tuck]
- untuck_service [default: untuck]
- launch/rfcomm_bind.launch
-
- machine [default: localhost]
- rfcomm_devices [default: /var/lib/robot/rfcomm_devices.yaml]
- launch/multisense_local.launch
-
- ip_address [default: ]
- mtu [default: 1500]
- imu_topic [default: /imu]
- SELF_FILTER_PARAM [default: ]
- ODOMETRY_PARAM [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- RUN_DRIVER [default: true]
- USE_RESIZE [default: true]
- HEIGHTMAP_FILTER_Z [default: 1.3]
- USE_HEIGHTMAP [default: true]
- USE_BIPED_LOCALIZATION [default: true]
- BASE_LINK_FRAME [default: BODY]
- BASE_ODOM_TOPIC [default: /odom]
- use_particle_odom [default: true]
- parameter_yaml [default: $(arg ODOMETRY_PARAM)]
- STATIC_FRAME [default: odom]
- STAND_FRAME [default: odom_init]
- launch/record_rosbag_slam_footstep.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/biped_localization.launch
-
- set_slam_laser_params [default: true]
- use_particle_odom [default: true]
- use_slam_feedback [default: false]
- nodelet_index [default: 2]
- stereo_namespace [default: multisense]
- slam_laser_scan_height [default: 0.5]
- slam_laser_max_height [default: 0.2]
- slam_laser_min_height [default: -0.2]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- use_gmapping [default: true]
- use_rtabmap [default: false]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- stereo [default: $(arg stereo_namespace)]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: false]
- invert_viso_tf [default: true]
- use_rviz [default: false]
- use_stereo_odometry [default: false]
- use_rtabmap [default: true]
- odom_topic [default: /biped_odom_particle]
- base_frame_id [default: $(arg base_link_frame)]
- odom_frame_id [default: biped_odom_particle]
- map_frame_id [default: map]
- publish_tf [default: true]
- left_image [default: /multisense_local/left/image_rect]
- right_image [default: /multisense_local/right/image_rect]
- left_camera_info [default: /multisense_local/left/camera_info]
- right_camera_info [default: /multisense_local/right/camera_info]
- launch/head_teleop.launch
-
- launch_joy_node [default: true]
- joy_dev [default: /dev/input/js0]
- joy_topic_raw [default: /joy_head/joy_raw]
- joy_topic_complemented [default: /joy_head/joy_complemented]
- cmd_vel_topic [default: joy_head/cmd_vel]
- deadzone [default: 0.3]
- autorepeat_rate [default: 20]
- joy_name_space [default: /]
- teleop_twist_joy_param_file [default: $(find jsk_robot_startup)/config/head_teleop_twist_joy.yaml]
- joystick_teleop_param_file [default: $(find jsk_robot_startup)/config/head_joystick_teleop.yaml]
- pass_through [default: false] — pass through joy data, set true to enable dog-like interface
- launch_joy_node [default: false]
- joy_topic [default: $(arg joy_topic_complemented)]
- joy_name_space [default: $(arg joy_name_space)]
- teleop_twist_joy_param_file [default: $(arg teleop_twist_joy_param_file)]
- joystick_teleop_param_file [default: $(arg joystick_teleop_param_file)]
- launch/smach_to_mail.launch
-
- use_mail [default: true]
- use_twitter [default: true]
- use_google_chat [default: true]
- email_sender_address [default: ]
- email_receiver_address [default: ]
- google_chat_space [default: ]
- namespace [default: smach_to_mail]
- launch/odometry_integration.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- use_robot_pose_ekf [default: false]
- publish_viso_tf [default: true]
- invert_viso_tf [default: true]
- launch/record_rosbag_slam.launch
-
- save_dir [default: $(env HOME)/.ros/slam_rosbag]
- save_robot_model [default: true]
- save_openni [default: false]
- save_multisense [default: false]
- save_all_image [default: false]
- camera_namespace [default: multisense]
- other_topics [default: ]
- other_regex_topics [default: ]
- launch/pointcloud_to_laserscan.launch
- original : navigation_global/move_base.xml (electric)
-
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_frame [default: pointcloud_to_scan_base]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 50.0]
- scan_height [default: 1.0]
- scan_frame_parent [default: BODY]
- scan_frame_odom [default: odom]
- use_fixed_frame [default: true]
- launch/viso.launch
-
- stereo [default: multisense]
- image [default: image_rect]
- odom_frame_id [default: viso_odom]
- base_link_frame_id [default: BODY]
- sensor_frame_id [default: left_camera_optical_frame]
- output_odom_topic [default: viso_odom]
- publish_viso_tf [default: false]
- invert_viso_tf [default: false]
- use_robot_pose_ekf [default: true]
- odom_used [default: true]
- odom_data [default: /odom]
- imu_used [default: false]
- imu_data [default: /imu]
- launch/sample_email_topic.launch
-
- receiver_address
- attached_file [default: $(find jsk_robot_startup)/images/jsk_safe_teleop_system.png]
- email_info_yaml [default: /var/lib/robot/email_info.yaml]
- use_eus [default: true]
- launch/respeaker.launch
-
- publish_tf [default: false]
- launch_soundplay [default: false]
- audio [default: speech_audio]
- speech_to_text [default: speech_to_text]
- language [default: en-US]
- launch_soundplay [default: $(arg launch_soundplay)]
- audio [default: $(arg audio)]
- speech_to_text [default: $(arg speech_to_text)]
- language [default: $(arg language)]
- launch/slam_laser_nodelets.launch
-
- nodelet_index [default: 2]
- laser_input [default: /multisense/cloud_self_filtered]
- assemble_base_frame [default: map]
- launch/gmapping.launch
- original : navigation_global/move_base.xml (electric)
-
- scan_frame_parent [default: BODY]
- scan_frame [default: pointcloud_to_scan_base]
- map_frame [default: map]
- odom_frame [default: odom]
- cloud_in [default: /multisense/organized_image_points2_color]
- scan_height [default: 1.0]
- max_height [default: 0.5]
- min_height [default: -0.5]
- angle_max [default: 2.35619]
- angle_min [default: -2.35619]
- range_max [default: 30.0]
- use_fixed_frame [default: true]
- particles [default: 30]
- iterations [default: 5]
- lsigma [default: 0.075]
- temporal_update [default: -1.0]
- map_update_interval [default: 5.0]
- minimum_score [default: 0.0]
- delta [default: 0.025]
- srr [default: 0.025]
- srt [default: 0.05]
- str [default: 0.025]
- stt [default: 0.05]
- launch/particle_odometry.launch
-
- use_slam_feedback [default: false]
- use_odometry_iir_filter [default: false]
- parameter_yaml [default: $(find jsk_robot_startup)/config/default_odometry_params.yaml]
- map_topic [default: /map]
- imu_topic [default: /imu]
- base_odom_topic [default: /odom]
- base_link_frame [default: BODY]
- launch/robot_database_mongo_server.launch
-
- host [default: musca.jsk.imi.i.u-tokyo.ac.jp]
- port [default: 27017]
- use_daemon [default: true]
- db_path [default: /var/lib/robot/mongodb_store]
- defaults_path [default: ]
- replicator_dump_path [default: /tmp/replicator_dumps]
- queue_size [default: 100]
- use_localdatacenter [default: true]
- launch/safe_teleop.launch
-
- machine [default: localhost]
- use_safe_teleop [default: true]
- odom_topic [default: /odom_teleop]
- joy_topic [default: /joy_vel]
- navigation_topic [default: /navigation/cmd_vel]
- input_topic [default: /input_vel]
- base_controller_topic [default: /base_controller/cmd_vel]
- launch/slam_octomap.launch
-
- input_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- apps/personal_use/personal_use.xml
- apps/check_use_sim_time/check_use_sim_time.xml