
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-01 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Kei Okada
Authors
jsk_nao_startup
What’s this?
contains JSK’s launch file for startup NAO with ROS
Running startup program
rossetip
roslaunch jsk_nao_startup jsk_nao_startup.launch network_interface:=<your network interaface (ex. eth0, enp0s31f6...)>
% For network_interface variable, please check ifconfig for the interface name your PC uses.
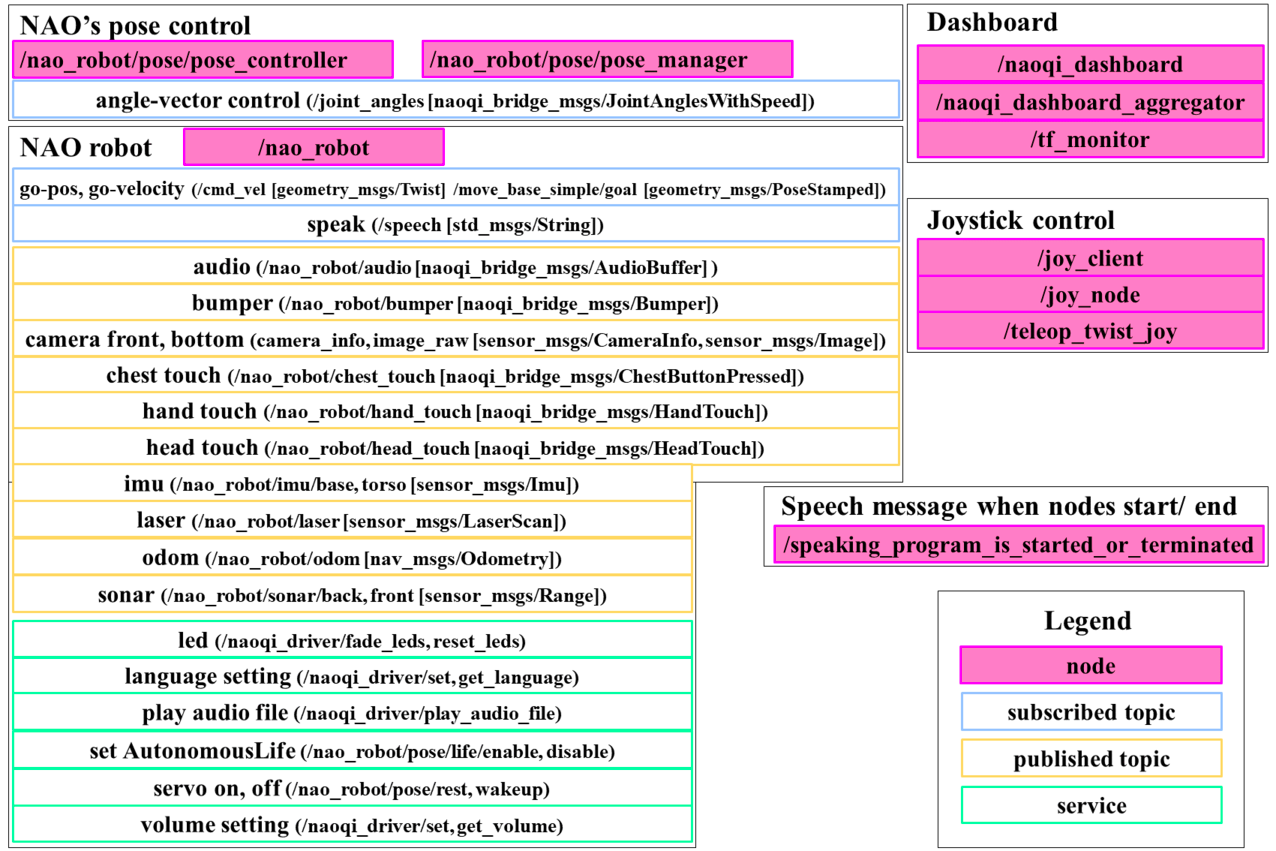
Nodes, topics and services
These are a list of nodes and some useful topics and services from jsk_nao_startup.launch.
nao_robot kochigami-develop branch is used to draw this figure.
Main modification is set namespace to nao_full.launch like pepper_full.launch.
NAO robot
Publications:
* /joint_states [sensor_msgs/JointState]
* /nao_robot/audio [naoqi_bridge_msgs/AudioBuffer]
* /nao_robot/bumper [naoqi_bridge_msgs/Bumper]
* /nao_robot/camera/bottom/camera_info [sensor_msgs/CameraInfo]
* /nao_robot/camera/bottom/image_raw [sensor_msgs/Image]
* /nao_robot/camera/front/camera_info [sensor_msgs/CameraInfo]
* /nao_robot/camera/front/image_raw [sensor_msgs/Image]
* /nao_robot/chest_touch [naoqi_bridge_msgs/ChestButtonPressed]
* /nao_robot/hand_touch [naoqi_bridge_msgs/HandTouch]
* /nao_robot/head_touch [naoqi_bridge_msgs/HeadTouch]
* /nao_robot/imu/base [sensor_msgs/Imu]
* /nao_robot/imu/torso [sensor_msgs/Imu]
* /nao_robot/info [naoqi_bridge_msgs/StringStamped]
* /nao_robot/laser [sensor_msgs/LaserScan]
* /nao_robot/odom [nav_msgs/Odometry]
* /nao_robot/sonar/back [sensor_msgs/Range]
* /nao_robot/sonar/front [sensor_msgs/Range]
* /tf [tf2_msgs/TFMessage]
Subscriptions:
* /cmd_vel [geometry_msgs/Twist]
* /joint_angles [naoqi_bridge_msgs/JointAnglesWithSpeed]
* /move_base_simple/goal [geometry_msgs/PoseStamped]
* /speech [std_msgs/String]
Services:
* /naoqi_driver/fade_leds
* /naoqi_driver/get_language
* /naoqi_driver/get_robot_config
* /naoqi_driver/get_volume
* /naoqi_driver/play_audio_file
* /naoqi_driver/reset_leds
* /naoqi_driver/set_language
* /naoqi_driver/set_volume
NAO’s pose control
Publications:
* /nao_robot/pose/get_life_state [std_msgs/String]
Action:
* /nao_robot/pose/joint_trajectory [naoqi_bridge_msgs/JointTrajectoryAction]
Services:
* /nao_robot/pose/life/disable
* /nao_robot/pose/life/enable
* /nao_robot/pose/life/get_state
* /nao_robot/pose/rest
* /nao_robot/pose/wakeup
Joystick

| Button | Function |
|---|---|
| 1 | Servo on/off |
| 2 | Interactive Life |
| 3 | Disable Life |
| 4+5 | Move head-p, head-y |
| 6+7 | Teleop Twist |
| 6+7+8 | Teleop Twist Turbo |
Related nodes: /joy_client, joy_node, /teleop_twist_joy
Dashboard
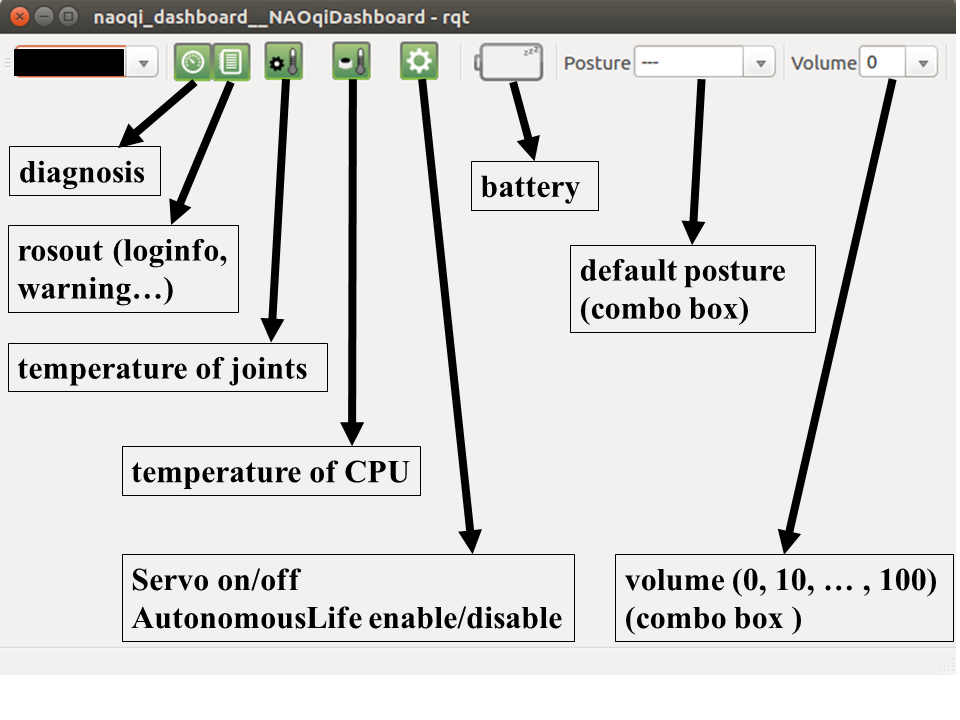
Related nodes: /naoqi_dashboard, /naoqi_dashboard_aggregator, /tf_monitor
ros_speech_recognition
When you want to use ros_speech_recognition with NAO microphone, please set launch_ros_sppech_recognition “true”
You can change audio_org(default=”/nao_robot/naoqi_driver/audio”), depth, sample_rate(please ssh your robot and check by "pactl list short sinks"), engine(default=”Google”), language(default=”ja-JP”), dynamic_energy_threshold and energy_threshold.
Example of usage
roslaunch jsk_nao_startup jsk_nao_startup.launch network_interface:=enp4s0 launch_ros_speech_recognition:=true audio_org:=/nao_robot/naoqi_driver/audio
Changelog for package jsk_nao_startup
1.1.0 (2017-07-16)
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- [jsk_nao_startup] same as #675
- add nao_bringup to run depend
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- Contributors: Kanae Kochigami
1.0.6 (2016-06-17)
1.0.5 (2016-04-18)
- add params for new naoqi_driver.launch
- Contributors: Kanae Kochigami
1.0.4 (2016-03-21)
1.0.3 (2016-03-05)
1.0.2 (2016-02-14)
1.0.1 (2015-11-19)
- move jsk_nao_startup under jsk_naoqi_robot
1.0.0 (2015-11-06)
0.0.13 (2015-11-06)
0.0.12 (2015-11-06)
0.0.11 (2015-09-01)
0.0.10 (2015-08-16)
- jsk_nao_startup/CMakeLists.txt : remove naoqi_driver from find_package
- Contributors: Kei Okada
0.0.9 (2015-08-03)
0.0.8 (2015-07-16)
0.0.7 (2015-06-11)
- change name of nao_speech.launch to speech.launch
- Contributors: Kanae Kochigami
0.0.6 (2015-04-10)
0.0.5 (2015-04-08)
0.0.4 (2015-01-30)
0.0.3 (2015-01-09)
0.0.2 (2015-01-08)
0.0.1 (2014-12-25)
- nao_vision and audio launch added
- update nao_driver -> naoqi_driver
- add jsk_nao_startup
- Contributors: Yuki Furuta, Kanae Kochigami
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| naoqi_driver | |
| roseus | |
| rostwitter | |
| catkin | |
| nao_interaction_msgs | |
| jsk_robot_startup | |
| nao_bringup | |
| ros_speech_recognition |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_robot |
Launch files
- launch/jsk_nao_startup.launch
-
- network_interface [default: eth0]
- launch_twitter [default: false]
- launch_joy [default: true]
- launch_ros_speech_recognition [default: false]
- audio_org [default: /nao_robot/naoqi_driver/audio]
- audio_topic [default: /audio]
- n_channel [default: 1]
- depth [default: 16]
- sample_rate [default: 48000]
- engine [default: Google]
- language [default: ja-JP]
- continuous [default: true]
- dynamic_energy_threshold [default: false]
- energy_threshold [default: 50]
Messages
Services
Plugins
Recent questions tagged jsk_nao_startup at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-01 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Kei Okada
Authors
jsk_nao_startup
What’s this?
contains JSK’s launch file for startup NAO with ROS
Running startup program
rossetip
roslaunch jsk_nao_startup jsk_nao_startup.launch network_interface:=<your network interaface (ex. eth0, enp0s31f6...)>
% For network_interface variable, please check ifconfig for the interface name your PC uses.
Nodes, topics and services
These are a list of nodes and some useful topics and services from jsk_nao_startup.launch.
nao_robot kochigami-develop branch is used to draw this figure.
Main modification is set namespace to nao_full.launch like pepper_full.launch.
NAO robot
Publications:
* /joint_states [sensor_msgs/JointState]
* /nao_robot/audio [naoqi_bridge_msgs/AudioBuffer]
* /nao_robot/bumper [naoqi_bridge_msgs/Bumper]
* /nao_robot/camera/bottom/camera_info [sensor_msgs/CameraInfo]
* /nao_robot/camera/bottom/image_raw [sensor_msgs/Image]
* /nao_robot/camera/front/camera_info [sensor_msgs/CameraInfo]
* /nao_robot/camera/front/image_raw [sensor_msgs/Image]
* /nao_robot/chest_touch [naoqi_bridge_msgs/ChestButtonPressed]
* /nao_robot/hand_touch [naoqi_bridge_msgs/HandTouch]
* /nao_robot/head_touch [naoqi_bridge_msgs/HeadTouch]
* /nao_robot/imu/base [sensor_msgs/Imu]
* /nao_robot/imu/torso [sensor_msgs/Imu]
* /nao_robot/info [naoqi_bridge_msgs/StringStamped]
* /nao_robot/laser [sensor_msgs/LaserScan]
* /nao_robot/odom [nav_msgs/Odometry]
* /nao_robot/sonar/back [sensor_msgs/Range]
* /nao_robot/sonar/front [sensor_msgs/Range]
* /tf [tf2_msgs/TFMessage]
Subscriptions:
* /cmd_vel [geometry_msgs/Twist]
* /joint_angles [naoqi_bridge_msgs/JointAnglesWithSpeed]
* /move_base_simple/goal [geometry_msgs/PoseStamped]
* /speech [std_msgs/String]
Services:
* /naoqi_driver/fade_leds
* /naoqi_driver/get_language
* /naoqi_driver/get_robot_config
* /naoqi_driver/get_volume
* /naoqi_driver/play_audio_file
* /naoqi_driver/reset_leds
* /naoqi_driver/set_language
* /naoqi_driver/set_volume
NAO’s pose control
Publications:
* /nao_robot/pose/get_life_state [std_msgs/String]
Action:
* /nao_robot/pose/joint_trajectory [naoqi_bridge_msgs/JointTrajectoryAction]
Services:
* /nao_robot/pose/life/disable
* /nao_robot/pose/life/enable
* /nao_robot/pose/life/get_state
* /nao_robot/pose/rest
* /nao_robot/pose/wakeup
Joystick
| Button | Function |
|---|---|
| 1 | Servo on/off |
| 2 | Interactive Life |
| 3 | Disable Life |
| 4+5 | Move head-p, head-y |
| 6+7 | Teleop Twist |
| 6+7+8 | Teleop Twist Turbo |
Related nodes: /joy_client, joy_node, /teleop_twist_joy
Dashboard
Related nodes: /naoqi_dashboard, /naoqi_dashboard_aggregator, /tf_monitor
ros_speech_recognition
When you want to use ros_speech_recognition with NAO microphone, please set launch_ros_sppech_recognition “true”
You can change audio_org(default=”/nao_robot/naoqi_driver/audio”), depth, sample_rate(please ssh your robot and check by "pactl list short sinks"), engine(default=”Google”), language(default=”ja-JP”), dynamic_energy_threshold and energy_threshold.
Example of usage
roslaunch jsk_nao_startup jsk_nao_startup.launch network_interface:=enp4s0 launch_ros_speech_recognition:=true audio_org:=/nao_robot/naoqi_driver/audio
Changelog for package jsk_nao_startup
1.1.0 (2017-07-16)
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- [jsk_nao_startup] same as #675
- add nao_bringup to run depend
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- Contributors: Kanae Kochigami
1.0.6 (2016-06-17)
1.0.5 (2016-04-18)
- add params for new naoqi_driver.launch
- Contributors: Kanae Kochigami
1.0.4 (2016-03-21)
1.0.3 (2016-03-05)
1.0.2 (2016-02-14)
1.0.1 (2015-11-19)
- move jsk_nao_startup under jsk_naoqi_robot
1.0.0 (2015-11-06)
0.0.13 (2015-11-06)
0.0.12 (2015-11-06)
0.0.11 (2015-09-01)
0.0.10 (2015-08-16)
- jsk_nao_startup/CMakeLists.txt : remove naoqi_driver from find_package
- Contributors: Kei Okada
0.0.9 (2015-08-03)
0.0.8 (2015-07-16)
0.0.7 (2015-06-11)
- change name of nao_speech.launch to speech.launch
- Contributors: Kanae Kochigami
0.0.6 (2015-04-10)
0.0.5 (2015-04-08)
0.0.4 (2015-01-30)
0.0.3 (2015-01-09)
0.0.2 (2015-01-08)
0.0.1 (2014-12-25)
- nao_vision and audio launch added
- update nao_driver -> naoqi_driver
- add jsk_nao_startup
- Contributors: Yuki Furuta, Kanae Kochigami
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| naoqi_driver | |
| roseus | |
| rostwitter | |
| catkin | |
| nao_interaction_msgs | |
| jsk_robot_startup | |
| nao_bringup | |
| ros_speech_recognition |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_robot |
Launch files
- launch/jsk_nao_startup.launch
-
- network_interface [default: eth0]
- launch_twitter [default: false]
- launch_joy [default: true]
- launch_ros_speech_recognition [default: false]
- audio_org [default: /nao_robot/naoqi_driver/audio]
- audio_topic [default: /audio]
- n_channel [default: 1]
- depth [default: 16]
- sample_rate [default: 48000]
- engine [default: Google]
- language [default: ja-JP]
- continuous [default: true]
- dynamic_energy_threshold [default: false]
- energy_threshold [default: 50]