
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
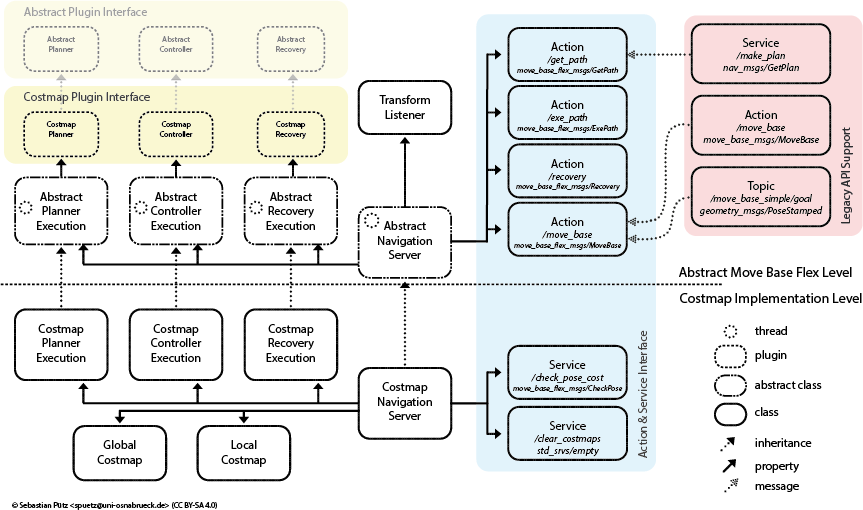
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
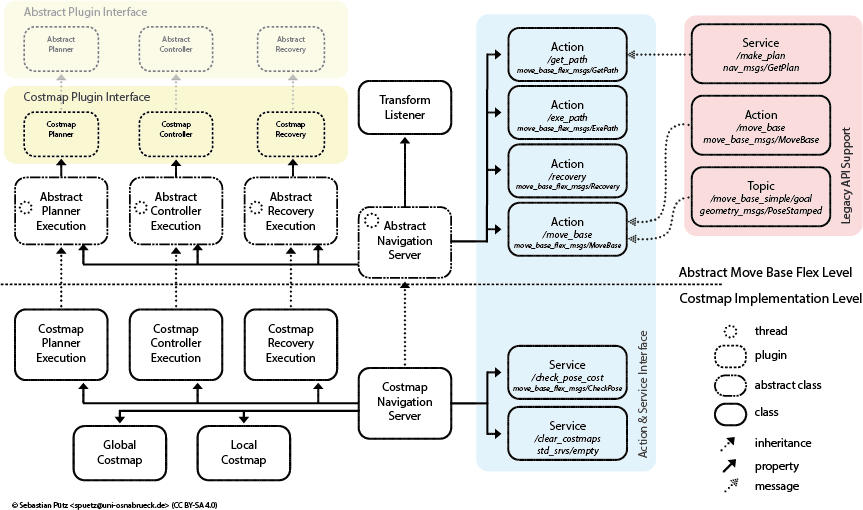
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
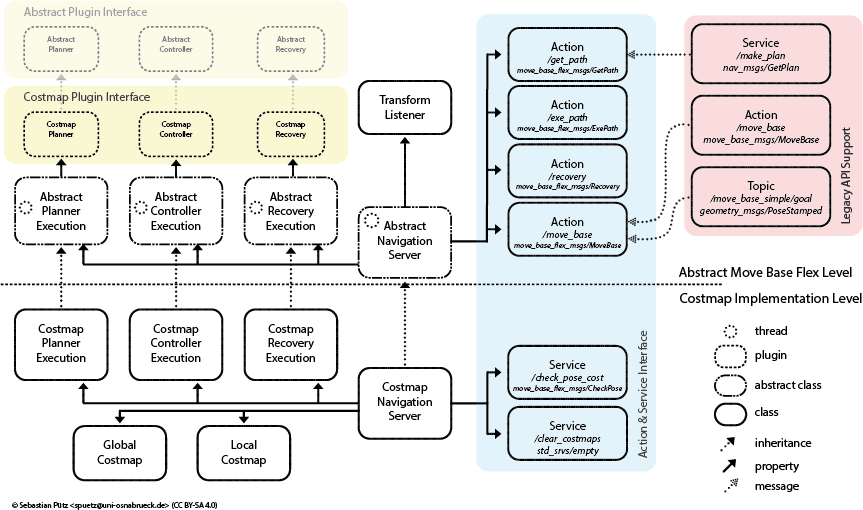
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.3.4 |
| License | BSD-3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2020-12-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.

Changelog for package mbf_costmap_nav
0.3.4 (2020-12-02)
- fix blind driving (#243)
0.3.3 (2020-11-05)
- Fix controller fails if robot pose gets older than tf_timeout, see #231
- clear the costmap before deactivating it, see #220
- Use [catkin_install_python]{.title-ref} to install legacy relay. see #219
- For move_base_legacy_relay, keep configured base local and global planners to send to MBF, see #209
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Make reference symbol position consistent across the project, see #198
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
- Prevent unrelated type casts for Cell, see #197
0.3.2 (2020-05-25)
- Remove dependency on base_local_planner and move FootprintHelper class to mbf_costmap_nav and make it static
0.3.1 (2020-04-07)
- Ensure that check_costmap_mutex is destroyed after timer.
- Avoid crash on shutdown by stop shutdown_costmap_timer on destructor and explicitly call the costmap_nav_srv destructor
0.3.0 (2020-03-31)
- add output for cancel method if nav_core plugin is wrapped
- unify license declaration to BSD-3
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | BSD-3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-10-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.4.0 (2021-10-26)
- make the costmaps used for planning and controlling configurable, see #278
- return empty footprint if partly outside of the map, see #272
- add tf_transform_ptr to the abstract planner execution, see #256
- transform pose to global frame before calling planner in costmap planner execution, see #256
0.3.4 (2020-12-02)
- fix blind driving, see #243
0.3.3 (2020-11-05)
- Fix controller fails if robot pose gets older than tf_timeout, see #231
- clear the costmap before deactivating it, see #220
- Use [catkin_install_python]{.title-ref} to install legacy relay. see #219
- For move_base_legacy_relay, keep configured base local and global planners to send to MBF, see #209
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Make reference symbol position consistent across the project, see #198
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
- Prevent unrelated type casts for Cell, see #197
0.3.2 (2020-05-25)
- Remove dependency on base_local_planner and move FootprintHelper class to mbf_costmap_nav and make it static
0.3.1 (2020-04-07)
- Ensure that check_costmap_mutex is destroyed after timer.
- Avoid crash on shutdown by stop shutdown_costmap_timer on destructor and explicitly call the costmap_nav_srv destructor
0.3.0 (2020-03-31)
- add output for cancel method if nav_core plugin is wrapped
- unify license declaration to BSD-3
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_costmap_nav at Robotics Stack Exchange
|
|
mbf_costmap_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | BSD-3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2021-10-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Costmap Navigation Server
The mbf_costmap_nav package contains the costmap navigation server implementation of Move Base Flex (MBF). The costmap navigation server is bound to the costmap_2d representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Additionally the mbf_costmap_nav package comes with a wrapper for the old navigation stack and the plugins which inherits from the nav_core base classes. Preferably it tries to load plugins for the new api, therefore plugins could even support both move_base and move_base_flex by inheriting both base classes.
Changelog for package mbf_costmap_nav
0.4.0 (2021-10-26)
- make the costmaps used for planning and controlling configurable, see #278
- return empty footprint if partly outside of the map, see #272
- add tf_transform_ptr to the abstract planner execution, see #256
- transform pose to global frame before calling planner in costmap planner execution, see #256
0.3.4 (2020-12-02)
- fix blind driving, see #243
0.3.3 (2020-11-05)
- Fix controller fails if robot pose gets older than tf_timeout, see #231
- clear the costmap before deactivating it, see #220
- Use [catkin_install_python]{.title-ref} to install legacy relay. see #219
- For move_base_legacy_relay, keep configured base local and global planners to send to MBF, see #209
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Make reference symbol position consistent across the project, see #198
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
- Prevent unrelated type casts for Cell, see #197
0.3.2 (2020-05-25)
- Remove dependency on base_local_planner and move FootprintHelper class to mbf_costmap_nav and make it static
0.3.1 (2020-04-07)
- Ensure that check_costmap_mutex is destroyed after timer.
- Avoid crash on shutdown by stop shutdown_costmap_timer on destructor and explicitly call the costmap_nav_srv destructor
0.3.0 (2020-03-31)
- add output for cancel method if nav_core plugin is wrapped
- unify license declaration to BSD-3
0.2.5 (2019-10-11)
- Add clear_on_shutdown functionality
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
0.2.4 (2019-06-16)
- Add check_point_cost service
- Lock costmaps on clear_costmaps service
- Replace recursive mutexes with normal ones when not needed
0.2.3 (2018-11-14)
- single publisher for controller execution objects
0.2.2 (2018-10-10)
- Do not use MultiThreadedSpinner, as costmap updates can crash when combining laser scans and point clouds
- Make start/stop costmaps mutexed, since concurrent calls to start can lead to segfaults
0.2.1 (2018-10-03)
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| gpp_plugin | |
| move_base_flex |