
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
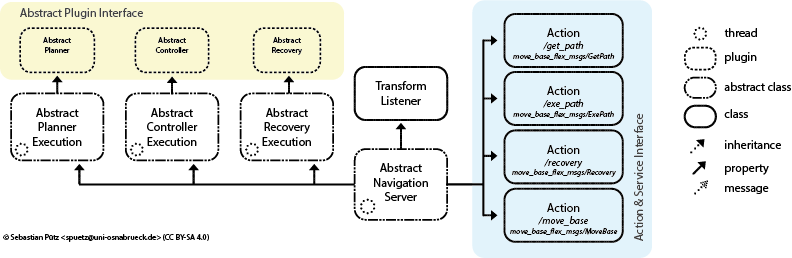
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
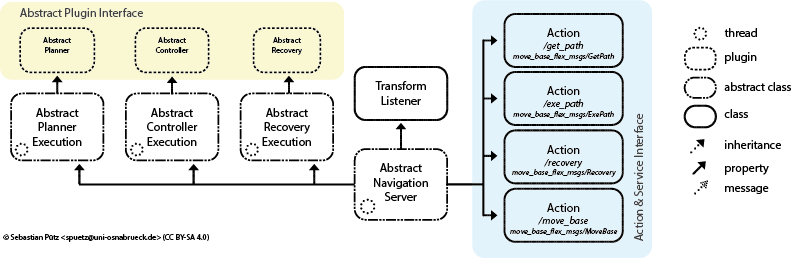
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.2.5 |
| License | 3-Clause BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
0.2.5 (2019-10-11)
- Update goal pose on replanning, so the feedback remains consistent
- Fix: Reset oscillation timer after executing a recovery behavior
- Remove debug log messages
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
- On move_base action, use MoveBaseResult constant to fill outcome in case of oscilation
0.2.4 (2019-06-16)
- Reduce log verbosity by combining lines and using more DEBUG
- Concurrency container refactoring
- Prevent LOST goals when replanning
- Set as canceled, when goals are preempted by a new plan
- move setAccepted to abstract action
- moved listener notification down after setVelocity
- fix: Correctly fill in the ExePathResult fields
- Fix controller_patience when controller_max_retries is -1
- Change current_twist for last_cmd_vel on exe_path/feedback
- Replace recursive mutexes with normal ones when not needed
- Give feedback with outcome and message for success and error cases from the plugin.
0.2.3 (2018-11-14)
- Do not publish path from MBF
- Single publisher for controller execution objects
- Ignore max_retries if value is negative and patience if 0
- Avoid annoying INFO log msg on recovery
0.2.2 (2018-10-10)
- Add outcome and message to the action's feedback in ExePath and MoveBase
0.2.1 (2018-10-03)
- Fix memory leak
- Fix uninitialized value for cost
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
- Concurrency for planners, controllers and recovery behaviors
- New class structure, allowing multiple executoin instances
- Fixes minor bugs
0.1.0 (2018-03-22)
- First release of move_base_flex for kinetic and lunar
Package Dependencies
| Deps | Name |
|---|---|
| tf | |
| roscpp | |
| actionlib | |
| actionlib_msgs | |
| dynamic_reconfigure | |
| std_msgs | |
| std_srvs | |
| nav_msgs | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| xmlrpcpp | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_costmap_nav | |
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Package Summary
| Version | 1.2.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Alexander Mock
- Georg John
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
Changelog for package mbf_abstract_nav
1.2.1 (2026-07-23)
- Remove ament_cmake_ros dependency
1.2.0 (2026-07-09)
- ROS 2 Lyrical Compatibility
- Non-blocking RobotInfo for faster control cycles
1.1.0 (2026-06-18)
- Added PlanRefiner interface, see #353
1.0.5 (2026-03-06)
1.0.4 (2026-03-05)
1.0.3 (2026-03-05)
1.0.2 (2026-02-10)
- Removed unused dependencies, see #368
1.0.1 (2026-02-10)
- Fixes tests, see #362
1.0.0 (2025-06-03)
- ROS 2 migration, see #346
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_cmake_gmock | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| nav_msgs | |
| rclcpp_action | |
| rclcpp | |
| std_msgs | |
| std_srvs |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.3.4 |
| License | BSD-3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2020-12-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
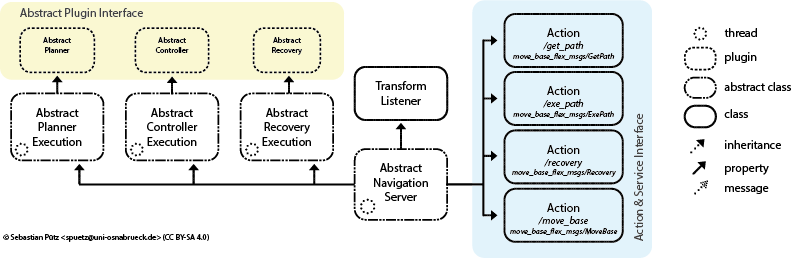
Changelog for package mbf_abstract_nav
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
- Remane robot_Information.cpp as robot_information.cpp
- Unify headers definitions and namespace intentation
- Add parameter to actively stop once the goal is reached
- Exit immediately from action done callbacks when action_state is CANCELED
0.2.5 (2019-10-11)
- Update goal pose on replanning, so the feedback remains consistent
- Fix: Reset oscillation timer after executing a recovery behavior
- Remove debug log messages
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
- On move_base action, use MoveBaseResult constant to fill outcome in case of oscilation
0.2.4 (2019-06-16)
- Reduce log verbosity by combining lines and using more DEBUG
- Concurrency container refactoring
- Prevent LOST goals when replanning
- Set as canceled, when goals are preempted by a new plan
- move setAccepted to abstract action
- moved listener notification down after setVelocity
- fix: Correctly fill in the ExePathResult fields
- Fix controller_patience when controller_max_retries is -1
- Change current_twist for last_cmd_vel on exe_path/feedback
- Replace recursive mutexes with normal ones when not needed
- Give feedback with outcome and message for success and error cases from the plugin.
0.2.3 (2018-11-14)
- Do not publish path from MBF
- Single publisher for controller execution objects
- Ignore max_retries if value is negative and patience if 0
- Avoid annoying INFO log msg on recovery
0.2.2 (2018-10-10)
- Add outcome and message to the action's feedback in ExePath and MoveBase
0.2.1 (2018-10-03)
- Fix memory leak
- Fix uninitialized value for cost
- Make MBF melodic and indigo compatible
- Fix GoalHandle references bug in callbacks
0.2.0 (2018-09-11)
- Update copyright and 3-clause-BSD license
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| tf | |
| roscpp | |
| actionlib | |
| actionlib_msgs | |
| dynamic_reconfigure | |
| std_msgs | |
| std_srvs | |
| nav_msgs | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| xmlrpcpp | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_costmap_nav | |
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | BSD-3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-10-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
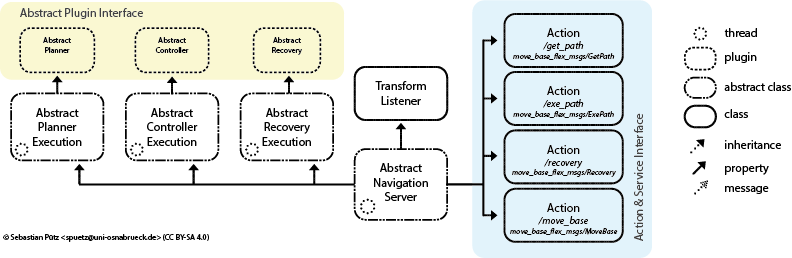
Changelog for package mbf_abstract_nav
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
- Remane robot_Information.cpp as robot_information.cpp
- Unify headers definitions and namespace intentation
- Add parameter to actively stop once the goal is reached
- Exit immediately from action done callbacks when action_state is CANCELED
0.2.5 (2019-10-11)
- Update goal pose on replanning, so the feedback remains consistent
- Fix: Reset oscillation timer after executing a recovery behavior
- Remove debug log messages
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
- On move_base action, use MoveBaseResult constant to fill outcome in case of oscilation
0.2.4 (2019-06-16)
- Reduce log verbosity by combining lines and using more DEBUG
- Concurrency container refactoring
- Prevent LOST goals when replanning
- Set as canceled, when goals are preempted by a new plan
- move setAccepted to abstract action
- moved listener notification down after setVelocity
- fix: Correctly fill in the ExePathResult fields
- Fix controller_patience when controller_max_retries is -1
- Change current_twist for last_cmd_vel on exe_path/feedback
- Replace recursive mutexes with normal ones when not needed
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| tf | |
| roscpp | |
| actionlib | |
| actionlib_msgs | |
| dynamic_reconfigure | |
| std_msgs | |
| std_srvs | |
| nav_msgs | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| xmlrpcpp | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_costmap_nav | |
| mbf_simple_nav | |
| move_base_flex |
Launch files
Messages
Services
Plugins
Recent questions tagged mbf_abstract_nav at Robotics Stack Exchange
|
|
mbf_abstract_nav package from move_base_flex repombf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | BSD-3 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2021-10-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sebastian Pütz
- Jorge Santos
Authors
- Sebastian Pütz
Move Base Flex Abstract Navigation Server
The mbf_abstract_nav package contains the abstract navigation server implementation of Move Base Flex (MBF). The abstract navigation server is not bound to any map representation. It provides the Actions for planning, controlling and recovering. At the time of start MBF loads all defined plugins. Therefor, it loads all plugins which are defined in the lists planners, controllers and recovery_behaviors. Each list holds a pair of a name and a type. The type defines which kind of plugin to load. The name defines under which name the plugin should be callable by the actions.
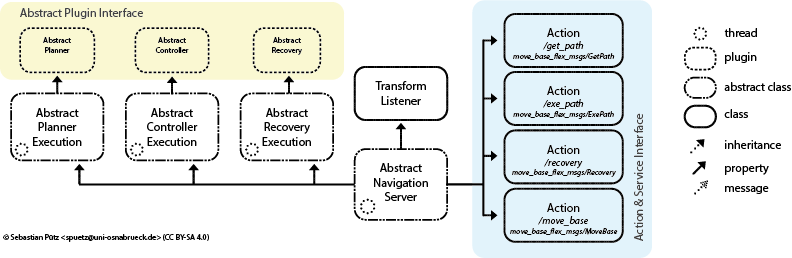
Changelog for package mbf_abstract_nav
0.4.0 (2021-10-26)
- Fixes planner execution API compatibility, see #279 and https://github.com/uos/mesh_navigation/issues/18
- return empty footprint if partly outside of the map, see #272
- Allow the controller to handle cancel if properly implemented, see #274
- Do not reset cancel_, as that will invalidate ongoing canceling
- Run replanning in its own thread, fixes #223, see #267
- enable max retries logic for controller execution test, see #264
- fix controller termination, see #263
- abstract controller execution unit tests, see #261
- planner action unit tests, see #244
- Fix number of retries check, see #262
- transform pose to global frame before calling planner in costmap planner execution, see #256
- Use ROS rates for sleeping to support simulation time, see #257
- wait for timeout in abstract eecution base, since cancel call could be missed, see #255
- add unit test for the abstract execution base, see #249
- fix race-condition in the test, see #254
- AbstractPlannerExecution refactoring and unit tests, see #237
- add documentation, missing includes, joinable check, and fixup and test the abstract_action_base
0.3.4 (2020-12-02)
0.3.3 (2020-11-05)
- On move_base action, handle properly RECALLED, REJECTED and LOST status, see #228
- Fill recovery result field used_plugin, see #229
- Signal from setState function, see #236
- Controller fails if robot pose gets older than tf_timeout, see #231
- Send move_base result when canceled during exe_path and recovery, see #218
- On controller cancel, wait for the control loop to stop, see #215
- Ensure MBF does not crash upon receiving an empty path, see #214
- Make robot_info a reference to keep one single instance, see #204
- mbf_abstract_nav action event logging from INFO to DEBUG, see #203
- Fix deallocation on shutdown by discarding all plugins and resetting action server pointers, see #199
- Move RobotInformation to mbf_utility, as it can be used generaly, see #196
0.3.2 (2020-05-25)
- Avoid duplicated warn logging output when we cannot cancel a plugin
- Remove unused methods and attributes from AbstractNavigationServer, which are already present at other places
- Reuse execution slots; cleanup only at destruction
- Enable different goal tolerance values for each action
0.3.1 (2020-04-07)
0.3.0 (2020-03-31)
- Clean up patience exceeded method
- Add last valid cmd time as class variable
- Add started state and improve output messages
- Unify license declaration to BSD-3
- Add parameter force_stop_on_cancel to send a zero-speed command on cancelation (default: true)
- remove explicit boost-exception dependency, Boost >= 1.69 provides exception by default.
- Allow the user time-consuming cancel implementations
- Rename abstract_action.h as abstract_action_base.hpp
- Remane robot_Information.cpp as robot_information.cpp
- Unify headers definitions and namespace intentation
- Add parameter to actively stop once the goal is reached
- Exit immediately from action done callbacks when action_state is CANCELED
0.2.5 (2019-10-11)
- Update goal pose on replanning, so the feedback remains consistent
- Fix: Reset oscillation timer after executing a recovery behavior
- Remove debug log messages
- Do not pass boost functions to abstract server to (de)activate costmaps. Run instead abstract methods (possibly) overridden in the costmap server, all costmap-related handling refactored to a new CostmapWrapper class
- On controller execution, check that local costmap is current
- On move_base action, use MoveBaseResult constant to fill outcome in case of oscilation
0.2.4 (2019-06-16)
- Reduce log verbosity by combining lines and using more DEBUG
- Concurrency container refactoring
- Prevent LOST goals when replanning
- Set as canceled, when goals are preempted by a new plan
- move setAccepted to abstract action
- moved listener notification down after setVelocity
- fix: Correctly fill in the ExePathResult fields
- Fix controller_patience when controller_max_retries is -1
- Change current_twist for last_cmd_vel on exe_path/feedback
- Replace recursive mutexes with normal ones when not needed
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| tf | |
| roscpp | |
| actionlib | |
| actionlib_msgs | |
| dynamic_reconfigure | |
| std_msgs | |
| std_srvs | |
| nav_msgs | |
| geometry_msgs | |
| mbf_abstract_core | |
| mbf_msgs | |
| mbf_utility | |
| xmlrpcpp | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mbf_costmap_nav | |
| mbf_simple_nav | |
| move_base_flex |