
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
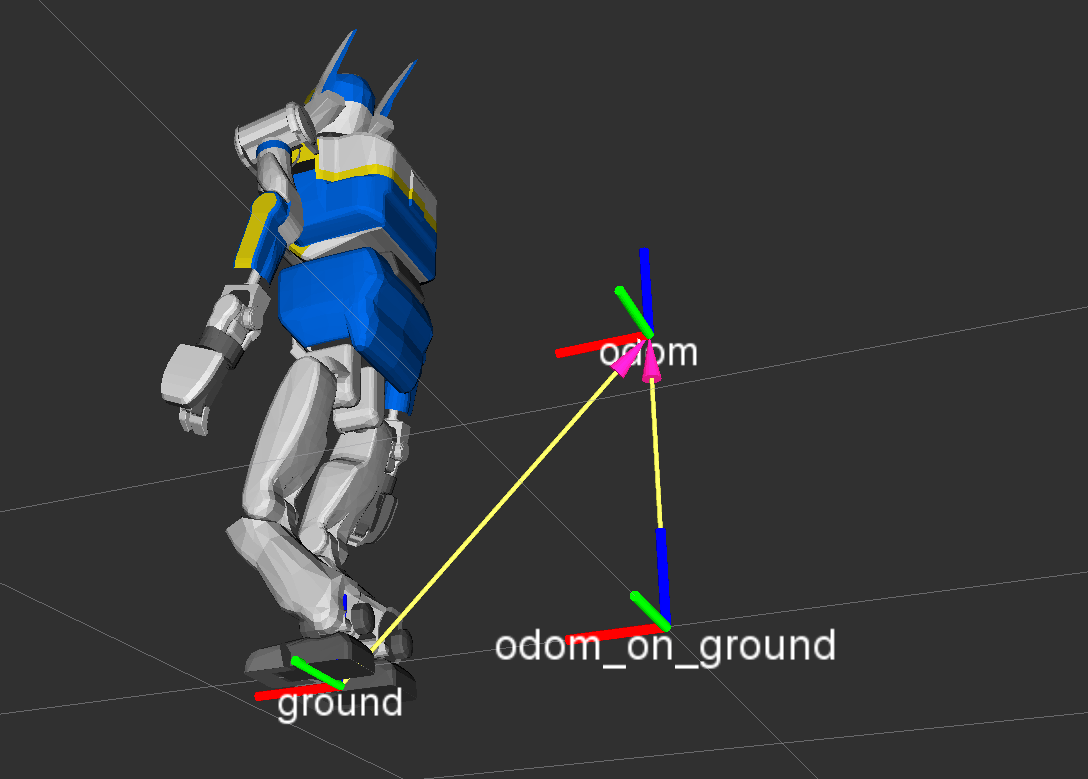
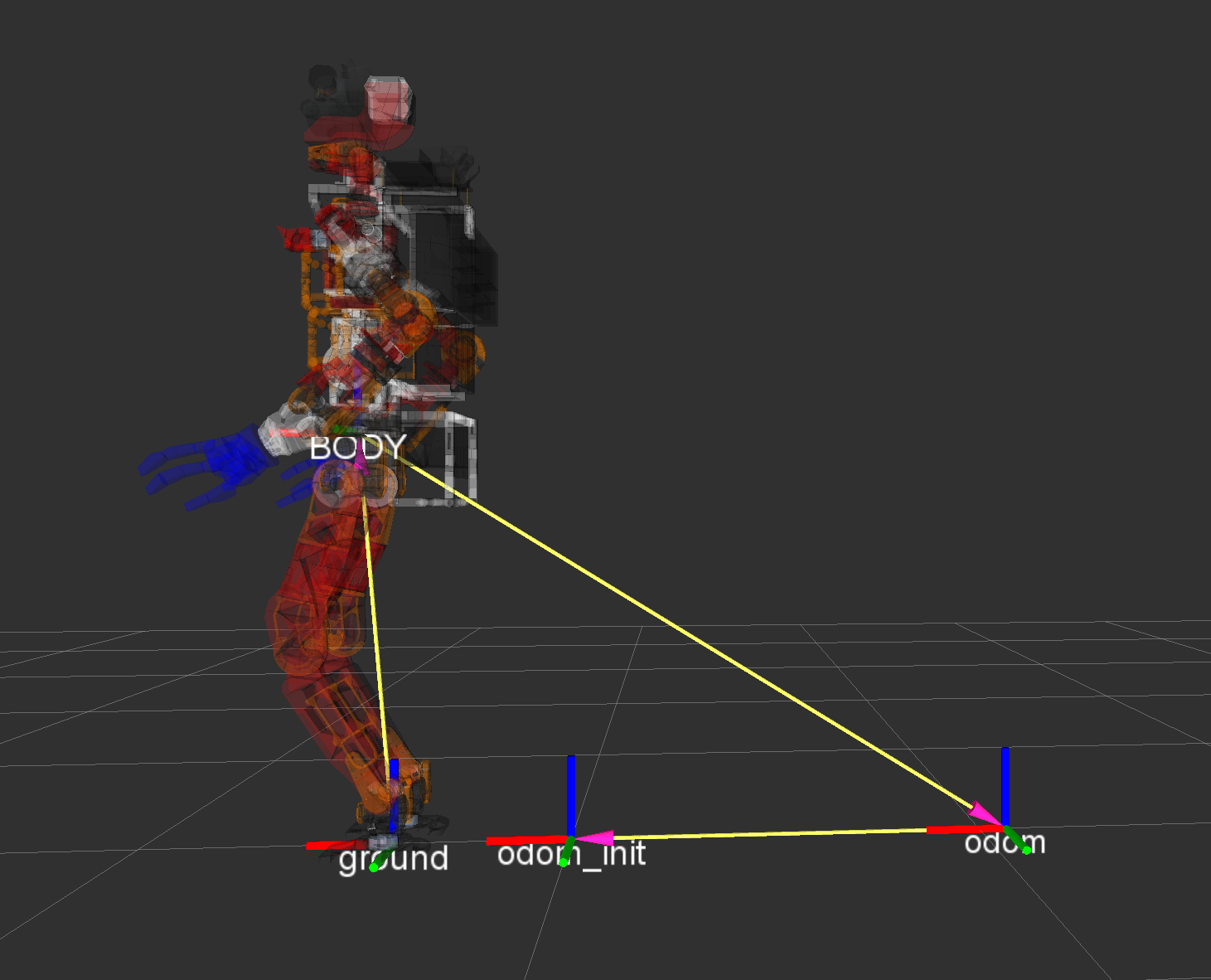
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| drc_task_common |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| rosjava_messages |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch
Plugins
Recent questions tagged jsk_footstep_controller at Robotics Stack Exchange
|
|
jsk_footstep_controller package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryohei Ueda
Authors
jsk_footstep_controller
footcoords
footcoords publishes three tf frames usefule for biped robots.
-
/ground: the middle coordinate of two legs. Two legs are specified by~lleg_end_coordsand~rleg_end_coords. -
/odom_on_ground: The coordinate computing by projecting/odomon the plane which is defined by/groundframe. The transformation is updated only if the robot on the floow by checking both oflfsensorandrfsensorprovides enough force (the threshold is~force_threshold). -
/odom_init: The coordinate of/odomwhen the robot lands on the ground most recent.
Subscribing Topics
-
lfsensosor(geometry_msgs/WrenchStamped) -
rfsensosor(geometry_msgs/WrenchStamped)footcoords computes transformation only if these two topic get the same timestamp.
Publishing Topics
-
/tf(tf2_msgs/TFMessage) -
~state(std_msgs/String):State of the robot and it is one of “air”, “ground”, “lfoot” and “rfoot”.
Parameters
-
~output_frame_id(String, default:odom_on_ground) -
~parent_frame_id(String, default:odom) -
~midcoords_frame_id(String, default:ground)Specifying frame_ids. See above description about these frame_ids.
-
~lfoot_frame_id(String, default:lleg_end_coords) -
~rfoot_frame_id(String, default:rleg_end_coords)frame_ids of end effectors of two legs.
-
~force_threshold(Double, default:10.0)Force threshold to judge which leg is on the ground
-
~lfoot_sensor_frame(String, default:lleg_end_coords) -
~rfoot_sensor_frame(String, default:lleg_end_coords)Transform force sensor rotation respected to these frame ids when evaluating force value. You need to choose reasonable frame_ids which gives positive z-force value when robot stands.
-
~invert_odom_init(Bool, default:true) Broadcast tf of odom_init as parent of odom if~invert_odom_initis true (odom_init -> odom).
Changelog for package jsk_footstep_controller
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_footstep_controller] add head-controller.l, add base-controller.l (#758)
- [jsk_footstep_controler/robot-boundingbox.l] remove dependency on jsk_demos/drc_task_common (#764)
- [jsk_control]add queue_size (#735)
- [jsk_footstep_controller] add sole conf for JAXON_BLUE (#690)
- 2to3 -w -fprint . (#763)
- Add melodic support [jsk_footstep_controller] fix a bug in footcoords.cpp due to a bug of boost::assign::list_of (#740)
- [jsk_footstep_controller] install config (#725)
- jsk_footstep_controller: check SoundRequest has volume attribute (#726, #724)
- add missing install directories (#699)
- Contributors: Kei Okada, Koki Shinjo, Masaki Murooka, Naoki Hiraoka, Yasuhiro Ishiguro, Kunio Kojima
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
- CMakeLists.txt : fix typo on install DESTINATION
- [jsk_footstep_controller] prevent too large footstep refine
- [jsk_footstep_controller] add utilitiy functions and update for footstep_planner
- [jsk_footstep_controller] add keyword for sample footstep client
- [jsk_footstep_contorller] Do not publish odom tf when publish_odom_tf param is false
- [jsk_footstep_contorller] Update footstep params for JAXON
- Contributors: Kei Okada, Yohei Kakiuchi, Iori Kumagai
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [jsk_footstep_controlelr/euslisp/util.l] Add function to gen pointcloud from face list
- [jsk_footstep_controller/euslisp/util.l] Set lfoot rfoot offset based on robot model.
- [jsk_footstep_controller/euslisp/util.l] Add function to get pointcloud included in bodies
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_controller] Use plane_projection in footstep_makrer
- [jsk_Footstep_controller] floor detection does not need x/y filter
- [jsk_footstep_controller] Use plane_projection when overwriting go-pos goal
- [jsk_footstep_planner] Add option to wait to subscribe plane topic
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_controller] Add use_snapshot option for detected floor coefficients topic
- [jsk_footstep_controller] Modified stabilizer_watcher's
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_controller] Rename old :is-walking method, which is used for overwrite decision
- [jsk_footstep_controller] Use feedback from go-pos-server to get go-pos-server status from client
- [jsk_footstep_controller] Publish feedback just after planning is failed
- [jsk_footstep_controller] add go-pos-server/client
- [jaxon-footstep-controller.l] move util functions to util.l and refactor functions
- [jsk_footstep_controller] remove temporary file
- [jsk_footstep_controller] Add height_offset param to consider crane and so on
- [jsk_footstep_controller] print name of foot
- [jsk_footstep_controller] print messages when collide footsteps
- [jsk_footstep_controller] Modify footstep collision avoidance in jaxon-footstep-controller.l
- [jsk_footstep_controller] Add instant collision avoidance for refined footsteps
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_controller, footcoords] fix for using waitForSensorFrameTransformation
- [jsk_footstep_planner] Add simple launch file to extract floor and estimate its parameters
- [jsk_footstep_controller] new jsk_recognition_utils::Plane() causes eigen alignment issues in 32bit environment
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/floor_detection.launch
-
- fixed_frame_id [default: odom]
- use_snapshot [default: true]
- input_cloud [default: robot_center_pointcloud/output]
- launch/hrp2jsk_footcoords.launch
-
- use_footcoords [default: true]
- launch/hrp2jsknt_real.launch
-
- USE_PLANE [default: false]
- INTERRUPTIBLE [default: false]
- RUN_CONTACT_MONITOR [default: false]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/ps3joy]
- launch/hrp2jsknt_real_full.launch
-
- INTERRUPTIBLE [default: true]
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/no_recog.launch
-
- REFINE_FOOTSTEP [default: true]
- USE_JOY [default: false]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/resetmanippose.launch
- launch/resetpose.launch
- launch/sample_hrp2jsknt.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js0]
- launch/sample_hrp2jsknt_random.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- launch/test_refinement.launch
- sample/sample_root_height.launch