
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
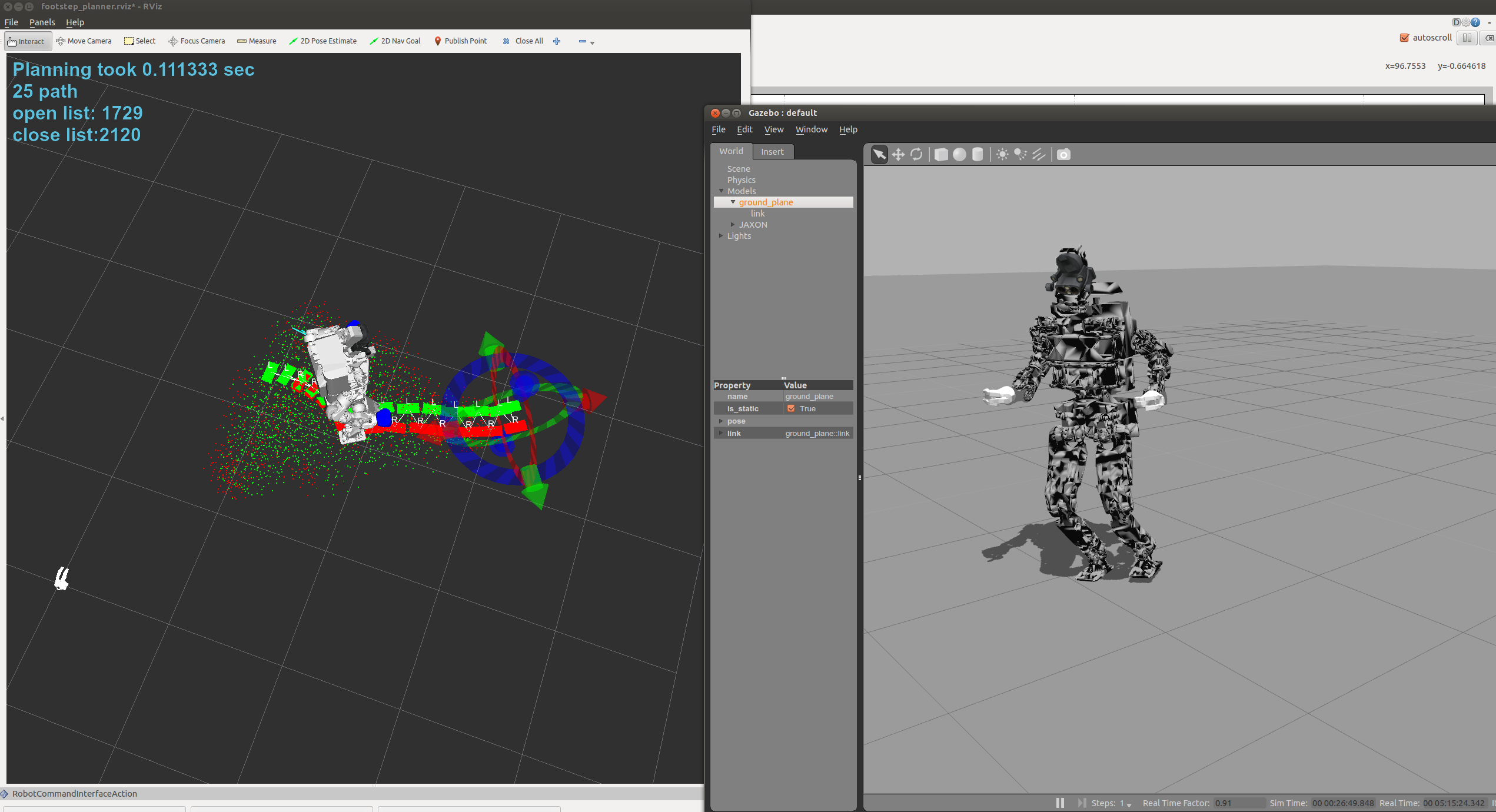
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/eusplanner/example.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/footstep_successors_visualization.launch
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/footstep_successors_visualization.launch
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch