
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
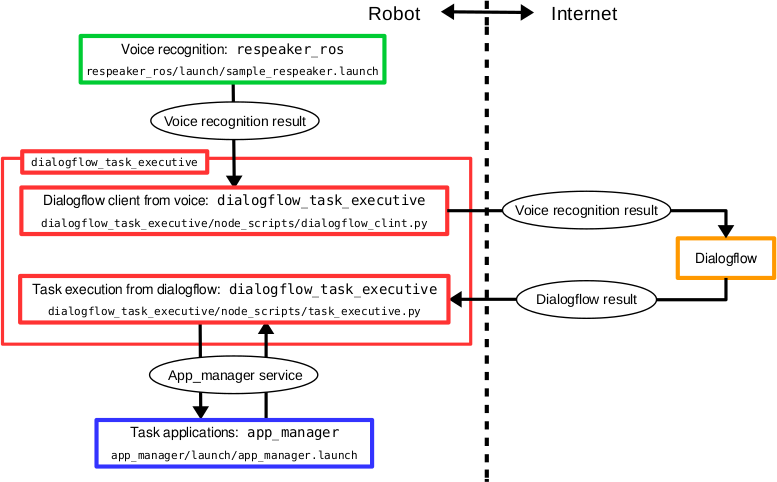
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
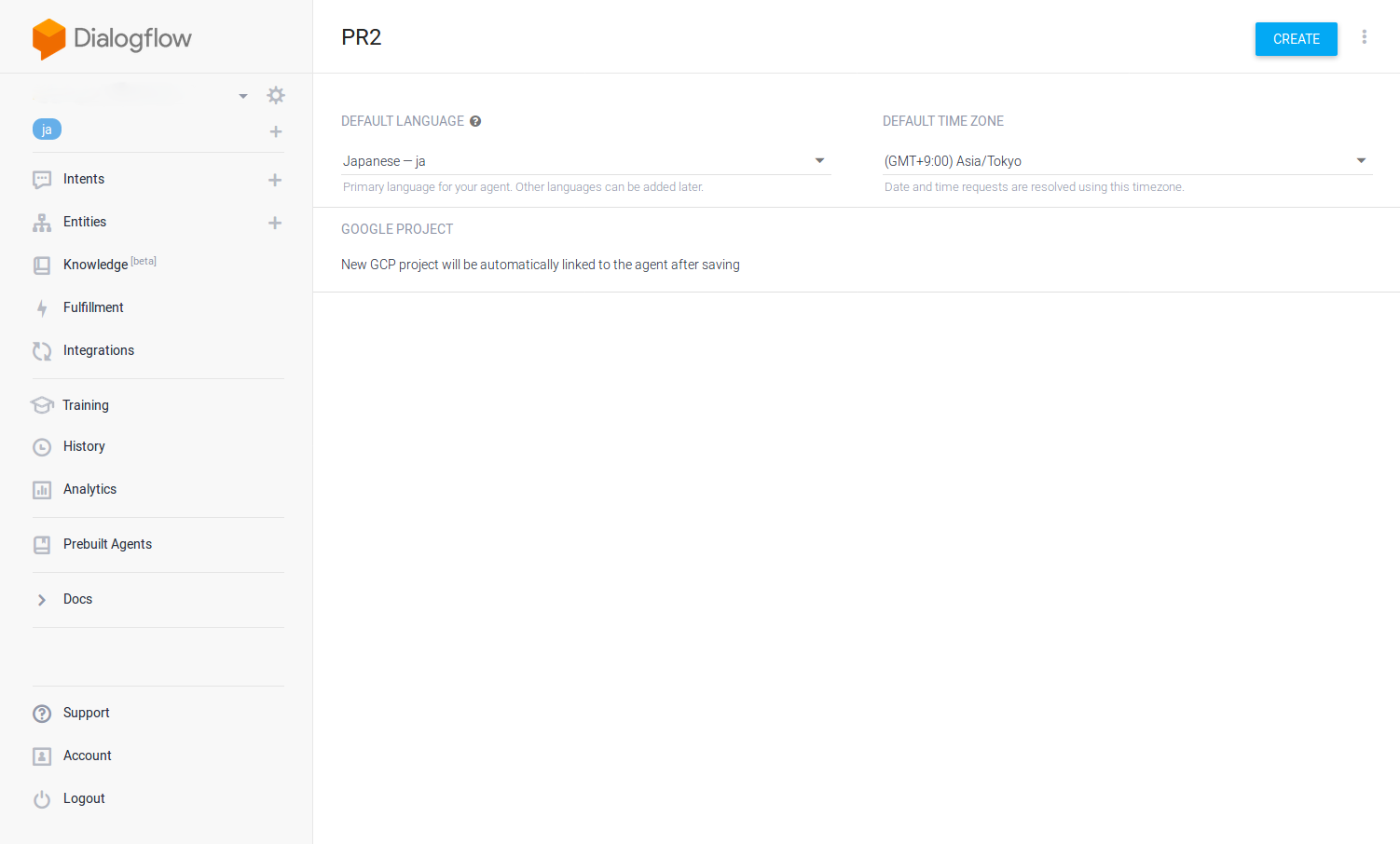
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
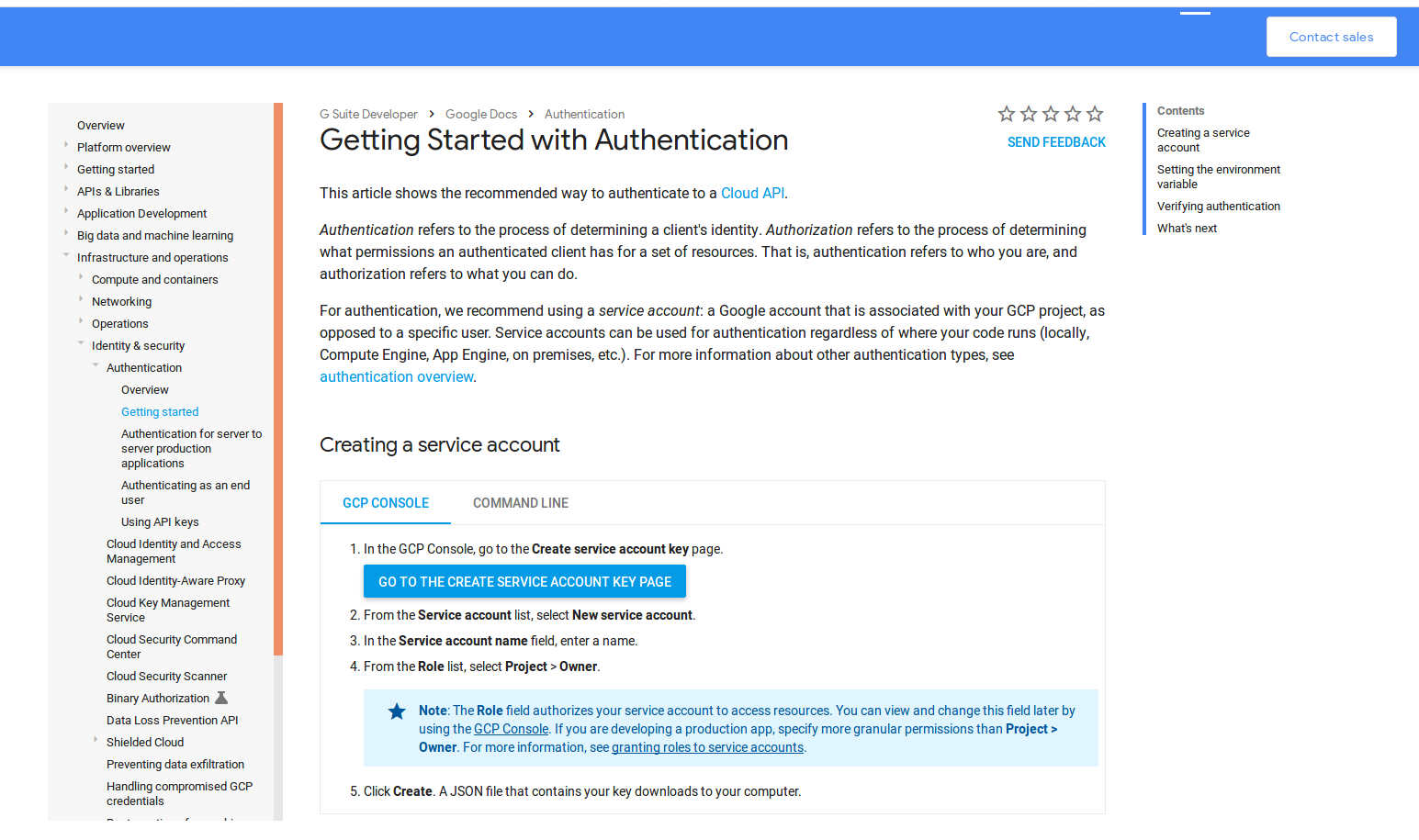
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
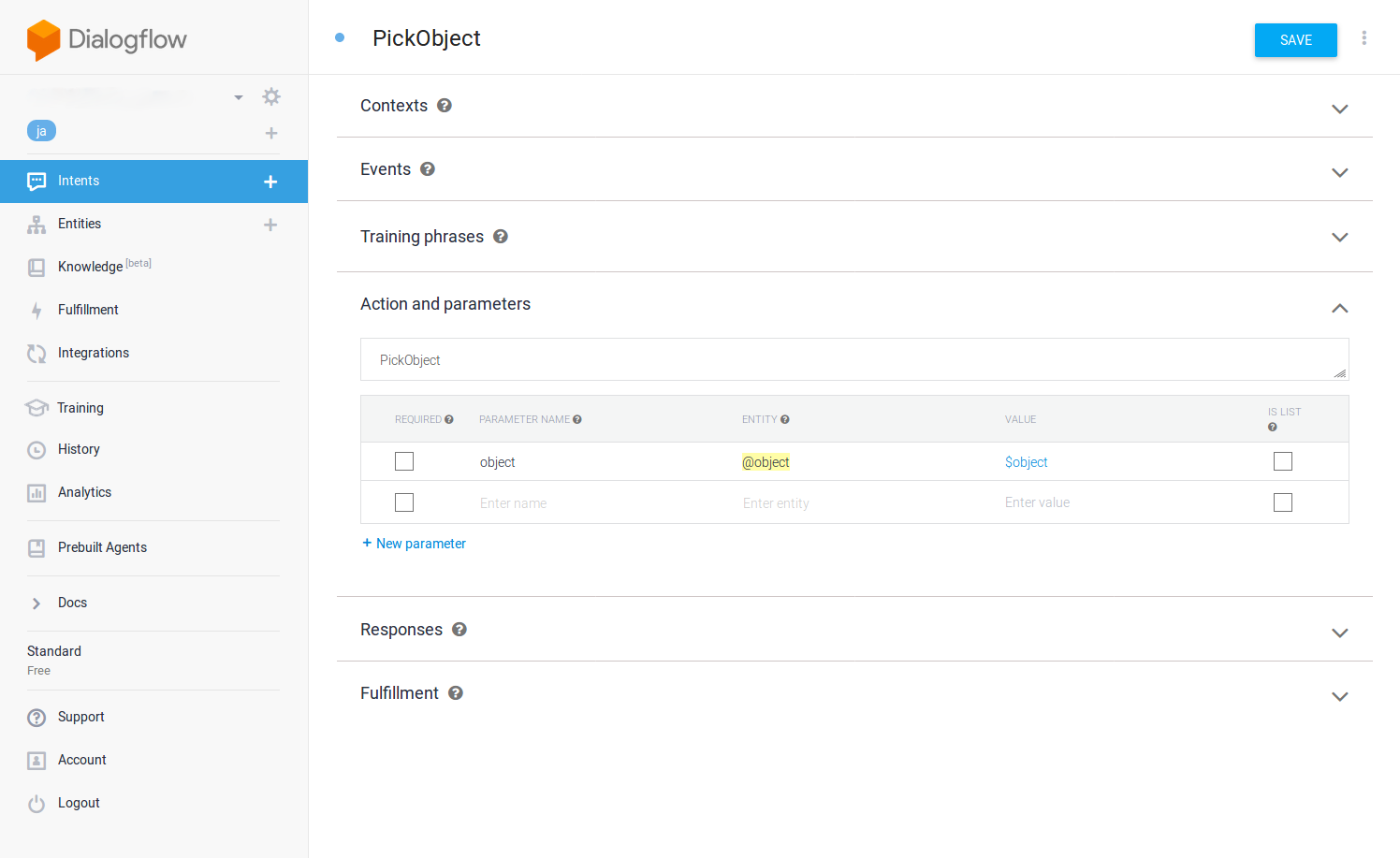
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]
Messages
Services
Plugins
Recent questions tagged dialogflow_task_executive at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Shingo Kitagawa
- Kei Okada
Authors
- Yoshiki Obinata
- Shingo Kitagawa
- Yuki Furuta
dialogflow_task_executive
A ROS package for Task execution with Dialogflow
System structure
Installation to your new robot
Create a Dialogflow account
Go to Dialogflow website and create an account.
If you are a JSK lab member, ask s-kitagawa or k-okada about JSK dialogflow account.
Create new Agent on Dialogflow
Go to console on Dialogflow Dialogflow and create new agent.
Create new Service account key
Go to this page and create service account key.
The page is as shown below and press blue button to create the key.
You can download the key as JSON file in the age and save the JSON file in your robot.
Set configuration
Use environmental variables
We need to set two environment variables: GOOGLE_APPLICATION_CREDENTIALS and DIALOGFLOW_PROJECT_ID.
-
GOOGLE_APPLICATION_CREDENTIALS- Path to Service account key JSON file (i.e.
/etc/ros/hogehoge.json)
- Path to Service account key JSON file (i.e.
-
DIALOGFLOW_PROJECT_ID- Dialogflow project ID (i.e.
pr2-hogehoge)
- Dialogflow project ID (i.e.
Use launch file arguments
Or we can use credential and project_id arguments of ` dialogflow_task_executive.launch` file
roslaunch dialogflow_task_executive dialogflow_task_executive.launch credential:=/etc/ros/hogehoge.json project_id:=pr2-hogehoge
If you have project_id in both your credential file and rospram (or argument of dialogflow_task_executive.launch), the project_id in both your credential file becomes effective. To use project_id in rosparam, use ~override_project_id option.
How to register new task in Dialogflow
Create new app_manager app
First, you need to create your task program to app_manager app.
Your app is registered and controled with tag <package name>/<app name> (i.e. your_package/your_demo).
Please read app_manager for more detailed information.
Create new Intent in Dialogflow
For your new task, create new Intent as below.
Action section, you can set full name (<package name>/<app name>), app name or camel-cased name of your app_manager app.
The Full name (<package name>/<app name>) is recommended to avoid name confliction.
If your app is registered as your_package/your_demo, you need to set your_package/your_demo, your_demo or YourDemo in Action section.
(i.e. App name: detect_cans_in_fridge201202/pick_object -> Dialogflow Action: detect_cans_in_fridge201202/pick_object, pick_object or PickObject)
In order to fulfill other forms, please read dialogflow doc for more detailed information abount Intent.
Usage
Launch jsk_robot_startup/lifelog/app_manager.launch
roslaunch jsk_robot_startup app_manager.launch
Note: You should skip this If you are using PR2 and Fetch in JSK lab because this launch is running by default.
Launch dialogflow_task_executive/launch/dialogflow_task_executive.launch
roslaunch dialogflow_task_executive dialogflow_task_executive.launch
Note: You can run this launch by sudo initctl jsk-dialog start on PR2 and Fetch in JSK lab.
Ask your robot to do the task
File truncated at 100 lines see the full file
Changelog for package dialogflow_task_executive
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- Add ROS-O 24.04 test (#521)
- Contributors: Kei Okada
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [respeaker_ros][diamondback] [ros-o] only use STREQUAL to compare ROS_DISTRO in cmake
- fix CMake: install apps/samples/config (#504)
- GA: relax failed test dialogflow_task_executive, julius_ros (#497)
- Contributors: Kei Okada
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- Add option to use project_id from json, instead of credentials (#460)
- add test to check if ros node is loadable
(#463)
- install python files under CATKIN_PACKAGE_BIN_DESTINATION
- dialogflow_task_executive: add missing dependencies to package.xml
- dialogflow_task_executive: pip -i only works with 64 bit (x86_64 and aarch64), other archtecture skips rospy_node.test
- dialogflow_task_executive/CMakeLists.txt: test/test_rospy_node.test depends on generate_messages
- dialogflow_task_executive/requirements.txt.indigo: specify grpcio for indigo
- add catkin_install_python for test, it is also change installed directory from BIN to SHARE, because we want to have same directory structure between devel and install
- add test to check if ros node is loadable If we use python2 PYTHON_INTERPRETER on 20.04, python2 fails to load rospy in /opt/ros/noetic, because rospy moduels are alraedy updated. If we use python3 PYTHON_INTERPRETER on 18.04, python3 can load rospy in /opt/ros/melodic by chance. c.f. https://github.com/jsk-ros-pkg/jsk_3rdparty/pull/367
- [dialogflow_task_executive] chmod -x because of catkin_virtualenv (#449)
- [dialogflow_task_executive] not use map for python3 in task_executive (#447)
- [dialogflow_task_executive] fix typo in dialogflow_client.py
(#445)
- chmod -x because of catkin_virtualenv
- not use map for python3 in task_executive
- fix typo in dialogflow_client.py
- [dialogflow_task_executive] add sample apps (#293)
- [dialogflow_task_executive] add speech_to_text_other topic name in speech_to_text_mux (#302)
- [CI] build catkin_virtualenv packages in indigo. (#419)
- [dialogflow_task_executive] check if ROS_PYTHON_VERSION is set to support indigo in dialogflow_client (#408)
- [#405 and #410] Fix CI (#415)
- [dialogflow_task_executive] Support noetic (#362)
- Fix GithubAction (#386)
- [dialogflow_task_executive] Enable aarch64 (#364)
- GithubAction: add test for aarch64(melodic) / indigo (arm64) (#365)
- [dialogflow_task_executive] set optenv as default false (#368)
- Explicit python interpreter in catkin_virtualenv (#367)
- [dialogflow_task_executive] add comments in DialogResponse.msg (#366)
- [dialogflow_task_executive] adding some args in dialogflow_ros.launch (#361)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin_virtualenv | |
| message_generation | |
| actionlib_msgs | |
| roslaunch | |
| catkin | |
| app_manager | |
| message_runtime | |
| std_msgs | |
| speech_recognition_msgs | |
| topic_tools | |
| rostest |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| google_chat_ros | |
| jsk_3rdparty |
Launch files
- launch/dialogflow_ros.launch
-
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch/dialogflow_task_executive.launch
-
- run_app_manager [default: false]
- applist [default: $(find dialogflow_task_executive)/apps]
- credential [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: $(optenv DIALOGFLOW_PROJECT_ID false)]
- override_project_id [default: false] — Specify true if the project_id argument takes priority over the project_id section of the credential file.
- enable_hotword [default: true]
- always_publish_result [default: false] — Always publish dialog_response topic even the node gets actionlib request.
- launch_dialogflow [default: true]
- use_audio [default: false]
- use_tts [default: true]
- language [default: ja-JP]
- soundplay_action_name [default: robotsound_jp]
- volume [default: 1.0]
- samples/demo.launch
-
- google_cloud_credentials_json [default: $(optenv GOOGLE_APPLICATION_CREDENTIALS false)] — Read credentials JSON from this value when use_yaml is false.
- project_id [default: eternal-byte-236613]
- run_app_manager [default: true] — Run app_manager or not
- enable_hotword [default: false]
- apps/sample_app/sample_app.xml
-
- place [default: Tokyo]