
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
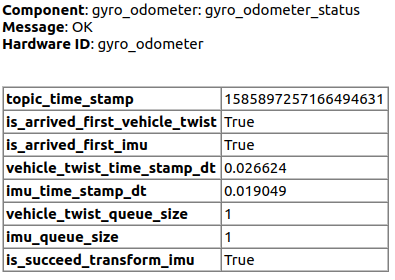
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_gyro_odometer at Robotics Stack Exchange
Package Summary
| Version | 1.9.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_core.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yamato Ando
- Masahiro Sakamoto
- NGUYEN Viet Anh
- Taiki Yamada
Authors
- Yamato Ando
autoware_gyro_odometer
Overview
autoware_gyro_odometer is the package to estimate twist by combining imu and vehicle speed.
Design
autoware_gyro_odometer is part of the perception or localization stack, providing reliable motion estimates for navigation and control. It is designed to estimate the robot’s motion by combining vehicle twist data (linear and angular velocities) with angular velocity measurements from an IMU (Inertial Measurement Unit).
Data Handling and Synchronization:
- Message Queues: Uses queues to store vehicle twist and gyro messages to ensure data synchronization.
-
Message Timeouts: Checks for message timeouts to discard stale data, preventing incorrect estimations.
Error Checks and Logging:
- Timeout Handling: Logs errors and clears queues if messages exceed a defined time threshold.
- Transformation Checks: Verifies that TF transforms between IMU and base frames are available; logs errors if not.
Data Processing:
- Transformation: Converts gyro data into the base frame using TF to ensure accurate angular velocity measurements.
- Mean and Covariance Calculation: Averages multiple measurements to reduce noise and calculates covariances to represent data reliability.
Output and Publishing:
- Twist Estimation: Constructs output messages with estimated twist values and covariances.
- Stationary Handling: Zeros out certain twist components when the robot is stationary to avoid noise.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
vehicle/twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
twist with covariance from vehicle |
imu |
sensor_msgs::msg::Imu |
imu from sensor |
Output
| Name | Type | Description |
|---|---|---|
twist_with_covariance |
geometry_msgs::msg::TwistWithCovarianceStamped |
estimated twist with covariance |
Parameters
{{ json_to_markdown(“localization/autoware_gyro_odometer/schema/gyro_odometer.schema.json”) }}
Assumptions / Known limits
-
[Assumption] The frame_id of input twist message must be set to base_link.
-
[Assumption] The covariance in the input messages must be properly assigned.
-
[Assumption] The angular velocity is set to zero if both the longitudinal vehicle velocity and the angular velocity around the yaw axis are sufficiently small. This is for suppression of the IMU angular velocity bias. Without this process, we misestimate the vehicle status when stationary.
-
[Limitation] The frequency of the output messages depends on the frequency of the input IMU message.
-
[Limitation] We cannot produce reliable values for the lateral and vertical velocities. Therefore we assign large values to the corresponding elements in the output covariance matrix.
Diagnostics
| Name | Description | Transition condition to Warning | Transition condition to Error |
|---|---|---|---|
topic_time_stamp |
the time stamp of service calling. [nano second] | none | none |
is_arrived_first_vehicle_twist |
whether the vehicle twist topic has been received even once. | not arrive yet | none |
is_arrived_first_imu |
whether the imu topic has been received even once. | not arrive yet | none |
vehicle_twist_time_stamp_dt |
the time difference between the current time and the latest vehicle twist topic. [second] | none | the time is longer than message_timeout_sec
|
imu_time_stamp_dt |
the time difference between the current time and the latest imu topic. [second] | none | the time is longer than message_timeout_sec
|
vehicle_twist_queue_size |
the size of vehicle_twist_queue. | none | none |
imu_queue_size |
the size of gyro_queue. | none | none |
is_succeed_transform_imu |
whether transform imu is succeed or not. | none | failed |
Changelog for package autoware_gyro_odometer
1.9.0 (2026-06-24)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_gyro_odometer): extract pure fusion logic and fix diagnostics level (#1112) Extract the sensor-fusion math out of the GyroOdometerNode private methods into pure, unit-testable free functions in a new internal header gyro_odometer_fusion.hpp:
- transform_covariance() (moved out of the .cpp so it is reachable from tests),
- fuse_twist() for the queue mean / covariance reduction and output-stamp selection,
- apply_stop_compensation() for the stopped-vehicle yaw-bias clearing, and
- determine_diagnostics() for the diagnostics level / message computation. The node methods now delegate to these functions and keep only I/O, TF and timeout handling. The refactor is behavior-preserving except for one latent bug fix: publish_diagnostics() previously left its local 'level' at OK, so the throttled WARN/ERROR console logs were unreachable and never fired. determine_diagnostics() now aggregates the maximum severity across triggered conditions, so the console WARN/ERROR logs fire as intended. The published DiagnosticStatus level and message text are unchanged (the TF-failure message still embeds output_frame). Add gtest coverage (test/test_gyro_odometer_fusion.cpp) for covariance handling, the stopped/moving/turning branches, the fusion mean/covariance/stamp output, and the diagnostics OK/WARN/ERROR/aggregation paths. Refs: autowarefoundation/autoware_core#1096
-
Contributors: Yutaka Kondo, github-actions
1.8.0 (2026-05-01)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
refactor(autoware_core): add USE_SCOPED_HEADER_INSTALL_DIR to localization packages (#984) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
feat(autoware_gyro_odometer): adopt cie (#961) Co-authored-by: Koichi Imai <<45482193+Koichi98@users.noreply.github.com>> Co-authored-by: atsushi421 <<atsushi.yano.2@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Copilot Autofix powered by AI <<175728472+Copilot@users.noreply.github.com>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>>
-
fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings (#934)
- fix(autoware_gyro_odometer): fix bugprone-narrowing-conversions warnings
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Junya Sasaki <<j2sasaki1990@gmail.com>>
-
Contributors: NorahXiong, Tetsuhiro Kawaguchi, Vishal Chauhan, github-actions
1.7.0 (2026-02-14)
1.6.0 (2025-12-30)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- perf(localization, sensing): reduce subscription queue size from 100 to 10 (#751)
- ci(pre-commit): autoupdate
(#723)
- pre-commit formatting changes
- Contributors: Mete Fatih Cırıt, Yutaka Kondo, github-actions
1.5.0 (2025-11-16)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat: replace [ament_auto_package]{.title-ref} to [autoware_ament_auto_package]{.title-ref} (#700)
- replace ament_auto_package to autoware_ament_auto_package
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/gyro_odometer.launch.xml
-
- input_vehicle_twist_with_covariance_topic [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input_imu_topic [default: /sensing/imu/imu_data]
- output_twist_raw_topic [default: gyro_twist_raw]
- output_twist_with_covariance_raw_topic [default: gyro_twist_with_covariance_raw]
- output_twist_topic [default: gyro_twist]
- output_twist_with_covariance_topic [default: gyro_twist_with_covariance]
- config_file [default: $(find-pkg-share autoware_gyro_odometer)/config/gyro_odometer.param.yaml]