
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.

Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A |  |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
Nav2
![]()
![]()

![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
⚠️ If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Nvidia develops GPU and AI technologies that power modern robotics, autonomous driving, data centers, gaming, and more.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use any of the algorithms in Nav2 or the analysis of the algorithms in your work, please cite this work in your papers!
- S. Macenski, T. Moore, DV Lu, A. Merzlyakov, M. Ferguson, From the desks of ROS maintainers: A survey of modern & capable mobile robotics algorithms in the robot operating system 2, Robotics and Autonomous Systems, 2023.
@article{macenski2023survey,
title={From the desks of ROS maintainers: A survey of modern & capable mobile robotics algorithms in the robot operating system 2},
author={S. Macenski, T. Moore, DV Lu, A. Merzlyakov, M. Ferguson},
year={2023},
journal = {Robotics and Autonomous Systems}
}
If you use the Smac Planner (Hybrid A*, State Lattice, 2D), please cite this work in your papers!
- S. Macenski, M. Booker, J. Wallace, Open-Source, Cost-Aware Kinematically Feasible Planning for Mobile and Surface Robotics. 2024.
@article{macenski2024smac,
title={Open-Source, Cost-Aware Kinematically Feasible Planning for Mobile and Surface Robotics},
author={Steve Macenski and Matthew Booker and Josh Wallace},
year={2024},
journal = {Arxiv}
}
If you use the Regulated Pure Pursuit Controller algorithm or software from this repository, please cite this work in your papers!
- S. Macenski, S. Singh, F. Martin, J. Gines, Regulated Pure Pursuit for Robot Path Tracking. Autonomous Robots, 2023.
@article{macenski2023regulated,
title={Regulated Pure Pursuit for Robot Path Tracking},
author={Steve Macenski and Shrijit Singh and Francisco Martin and Jonatan Gines},
year={2023},
journal = {Autonomous Robots}
}
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Contributors must sign-off each commit by adding a Signed-off-by: ...
line to commit messages to certify that they have the right to submit
the code they are contributing to the project according to the
Developer Certificate of Origin (DCO).
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | kilted |
| Last Updated | 2026-01-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- ROSCon Talks
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
⚠️ If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.

Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Nvidia develops GPU and AI technologies that power modern robotics, autonomous driving, data centers, gaming, and more.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@inproceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use any of the algorithms in Nav2 or the analysis of the algorithms in your work, please cite this work in your papers!
- S. Macenski, T. Moore, DV Lu, A. Merzlyakov, M. Ferguson, From the desks of ROS maintainers: A survey of modern & capable mobile robotics algorithms in the robot operating system 2, Robotics and Autonomous Systems, 2023.
@article{macenski2023survey,
title = {From the desks of ROS maintainers: A survey of modern & capable mobile robotics algorithms in the robot operating system 2},
author = {S. Macenski, T. Moore, DV Lu, A. Merzlyakov, M. Ferguson},
year = {2023},
journal = {Robotics and Autonomous Systems}
}
If you use the Smac Planner (Hybrid A*, State Lattice, 2D), please cite this work in your papers!
- S. Macenski, M. Booker, J. Wallace, Open-Source, Cost-Aware Kinematically Feasible Planning for Mobile and Surface Robotics. 2024.
@article{macenski2024smac,
title = {Open-Source, Cost-Aware Kinematically Feasible Planning for Mobile and Surface Robotics},
author = {Steve Macenski and Matthew Booker and Josh Wallace},
year = {2024},
journal = {Arxiv}
}
If you use the Regulated Pure Pursuit Controller algorithm or software from this repository, please cite this work in your papers!
- S. Macenski, S. Singh, F. Martin, J. Gines, Regulated Pure Pursuit for Robot Path Tracking. Autonomous Robots, 2023.
@article{macenski2023regulated,
title = {Regulated Pure Pursuit for Robot Path Tracking},
author = {Steve Macenski and Shrijit Singh and Francisco Martin and Jonatan Gines},
year = {2023},
journal = {Autonomous Robots}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Contributors must sign-off each commit by adding a Signed-off-by: ...
line to commit messages to certify that they have the right to submit
the code they are contributing to the project according to the
Developer Certificate of Origin (DCO).
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | crystal-devel |
| Last Updated | 2019-03-13 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 0.1.7 |
| nav2_bringup | 0.1.7 |
| nav2_bt_navigator | 0.1.7 |
| nav2_common | 0.1.7 |
| nav2_costmap_2d | 0.1.7 |
| costmap_queue | 0.1.7 |
| dwb_controller | 0.1.7 |
| dwb_core | 0.1.7 |
| dwb_critics | 0.1.7 |
| dwb_msgs | 0.1.7 |
| dwb_plugins | 0.1.7 |
| nav2_dwb_controller | 0.1.7 |
| nav_2d_msgs | 0.1.7 |
| nav_2d_utils | 0.1.7 |
| nav2_dynamic_params | 0.1.7 |
| nav2_map_server | 0.1.7 |
| nav2_mission_executor | 0.1.7 |
| nav2_motion_primitives | 0.1.7 |
| nav2_msgs | 0.1.7 |
| nav2_navfn_planner | 0.1.7 |
| nav2_robot | 0.1.7 |
| nav2_simple_navigator | 0.1.7 |
| nav2_tasks | 0.1.7 |
| nav2_util | 0.1.7 |
| nav2_voxel_grid | 0.1.7 |
| nav2_world_model | 0.1.7 |
| navigation2 | 0.1.7 |
README
Navigation2
ROS2 Navigation System
 CircleCI
CircleCI
 Travis
Travis
ROS Build Farm

Overview
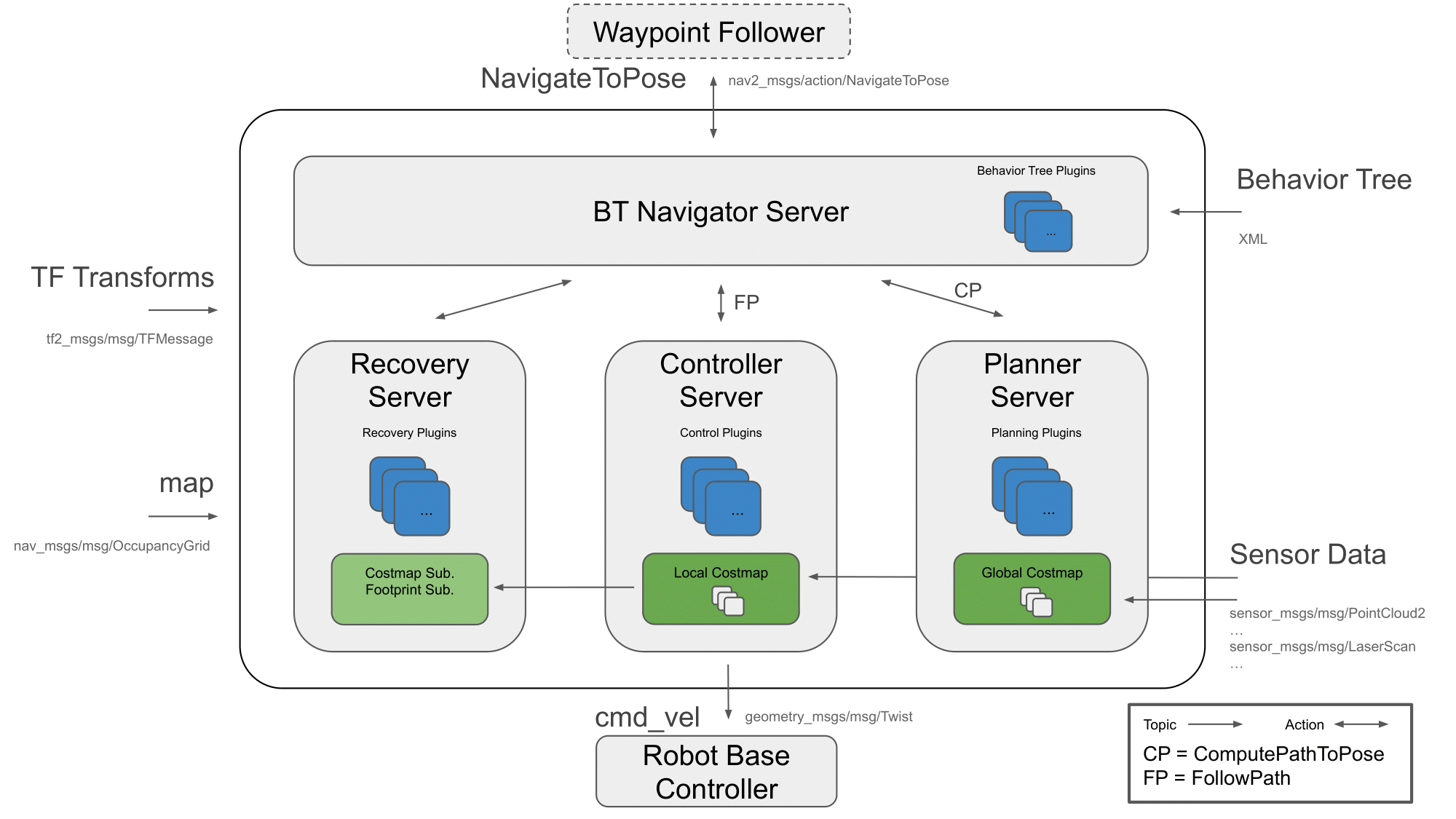
The ROS 2 Navigation System is the control system that enables a robot to autonomously reach a goal state, such as a specific position and orientation relative to a specific map. Given a current pose, a map, and a goal, such as a destination pose, the navigation system generates a plan to reach the goal, and outputs commands to autonomously drive the robot, respecting any safety constraints and avoiding obstacles encountered along the way.
Contributing
We are currently in the pre-release development phase, contributions are welcome. To contribute, see the documentation README.
Building the source
For instructions on how to download and build this repo, see the BUILD.md file.
Creating a docker image
To build an image from the Dockerfile in the navigation2 folder: First, clone the repo to your local system (or see Building the source above)
sudo docker build -t nav2/latest .
If proxies are needed:
sudo docker build -t nav2/latest --build-arg http_proxy=http://proxy.my.com:### --build-arg https_proxy=http://proxy.my.com:### .
Note: You may also need to configure your docker for DNS to work. See article here for details: https://development.robinwinslow.uk/2016/06/23/fix-docker-networking-dns/
Using CI build docker container
We allow for you to pull the latest docker image from the master branch at any time. As new releases and tags are made, docker containers on docker hub will be versioned as well to chose from.
sudo docker pull stevemacenski/navigation2:latest
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | eloquent-devel |
| Last Updated | 2021-01-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 0.3.5 |
| nav2_behavior_tree | 0.3.5 |
| nav2_bringup | 0.3.5 |
| nav2_gazebo_spawner | 0.3.5 |
| nav2_bt_navigator | 0.3.5 |
| nav2_common | 0.3.5 |
| nav2_controller | 0.3.5 |
| nav2_core | 0.3.5 |
| nav2_costmap_2d | 0.3.5 |
| costmap_queue | 0.3.5 |
| dwb_core | 0.3.5 |
| dwb_critics | 0.3.5 |
| dwb_msgs | 0.3.5 |
| dwb_plugins | 0.3.5 |
| nav2_dwb_controller | 0.3.5 |
| nav_2d_msgs | 0.3.5 |
| nav_2d_utils | 0.3.5 |
| nav2_lifecycle_manager | 0.3.5 |
| nav2_map_server | 0.3.5 |
| nav2_msgs | 0.3.5 |
| nav2_navfn_planner | 0.3.5 |
| nav2_planner | 0.3.5 |
| nav2_recoveries | 0.3.5 |
| nav2_rviz_plugins | 0.3.5 |
| nav2_system_tests | 0.3.5 |
| nav2_util | 0.3.5 |
| nav2_voxel_grid | 0.3.5 |
| nav2_waypoint_follower | 0.3.5 |
| navigation2 | 0.3.5 |
README
Navigation2
ROS2 Navigation System
CircleCI
 DockerHub
DockerHub
ROS Build Farm
![]()
Overview
The ROS 2 Navigation System is the control system that enables a robot to autonomously reach a goal state, such as a specific position and orientation relative to a specific map. Given a current pose, a map, and a goal, such as a destination pose, the navigation system generates a plan to reach the goal, and outputs commands to autonomously drive the robot, respecting any safety constraints and avoiding obstacles encountered along the way.
Documentation
For detailed instructions on how to install and run the examples, please visit our documentation site.
Contributing
Contributions are welcome!. For more information, please review our contribution guidelines.
Building the source
For instructions on how to download and build this repo, see the BUILD.md file.
Creating a docker image
To build an image from the Dockerfile in the navigation2 folder: First, clone the repo to your local system (or see Building the source above)
sudo docker build -t nav2/latest .
If proxies are needed:
sudo docker build -t nav2/latest --build-arg http_proxy=http://proxy.my.com:### --build-arg https_proxy=http://proxy.my.com:### .
Note: You may also need to configure your docker for DNS to work. See article here for details: https://development.robinwinslow.uk/2016/06/23/fix-docker-networking-dns/
Using CI build docker container
We allow for you to pull the latest docker image from the master branch at any time. As new releases and tags are made, docker containers on docker hub will be versioned as well to chose from.
sudo docker pull rosplanning/navigation2:latest
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | dashing-devel |
| Last Updated | 2020-12-28 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 0.2.6 |
| nav2_behavior_tree | 0.2.6 |
| nav2_bringup | 0.2.6 |
| nav2_bt_navigator | 0.2.6 |
| nav2_common | 0.2.6 |
| nav2_costmap_2d | 0.2.6 |
| costmap_queue | 0.2.6 |
| dwb_controller | 0.2.6 |
| dwb_core | 0.2.6 |
| dwb_critics | 0.2.6 |
| dwb_msgs | 0.2.6 |
| dwb_plugins | 0.2.6 |
| nav2_dwb_controller | 0.2.6 |
| nav_2d_msgs | 0.2.6 |
| nav_2d_utils | 0.2.6 |
| nav2_dynamic_params | 0.2.6 |
| nav2_lifecycle_manager | 0.2.6 |
| nav2_map_server | 0.2.6 |
| nav2_msgs | 0.2.6 |
| nav2_navfn_planner | 0.2.6 |
| nav2_recoveries | 0.2.6 |
| nav2_rviz_plugins | 0.2.6 |
| nav2_system_tests | 0.2.6 |
| nav2_util | 0.2.6 |
| nav2_voxel_grid | 0.2.6 |
| nav2_world_model | 0.2.6 |
| navigation2 | 0.2.6 |
README
Navigation2
ROS2 Navigation System
CircleCI
DockerHub
Travis
ROS Build Farm
![]()
Overview
The ROS 2 Navigation System is the control system that enables a robot to autonomously reach a goal state, such as a specific position and orientation relative to a specific map. Given a current pose, a map, and a goal, such as a destination pose, the navigation system generates a plan to reach the goal, and outputs commands to autonomously drive the robot, respecting any safety constraints and avoiding obstacles encountered along the way.
Contributing
We are currently in the pre-release development phase, contributions are welcome. To contribute, see the documentation README.
Building the source
For instructions on how to download and build this repo, see the BUILD.md file.
Creating a docker image
To build an image from the Dockerfile in the navigation2 folder: First, clone the repo to your local system (or see Building the source above)
sudo docker build -t nav2/latest .
If proxies are needed:
sudo docker build -t nav2/latest --build-arg http_proxy=http://proxy.my.com:### --build-arg https_proxy=http://proxy.my.com:### .
Note: You may also need to configure your docker for DNS to work. See article here for details: https://development.robinwinslow.uk/2016/06/23/fix-docker-networking-dns/
Using CI build docker container
We allow for you to pull the latest docker image from the master branch at any time. As new releases and tags are made, docker containers on docker hub will be versioned as well to chose from.
sudo docker pull stevemacenski/navigation2:latest
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2022-09-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.0.12 |
| nav2_behavior_tree | 1.0.12 |
| nav2_bringup | 1.0.12 |
| nav2_gazebo_spawner | 1.0.12 |
| nav2_bt_navigator | 1.0.12 |
| nav2_common | 1.0.12 |
| nav2_controller | 1.0.12 |
| nav2_core | 1.0.12 |
| nav2_costmap_2d | 1.0.12 |
| costmap_queue | 1.0.12 |
| dwb_core | 1.0.12 |
| dwb_critics | 1.0.12 |
| dwb_msgs | 1.0.12 |
| dwb_plugins | 1.0.12 |
| nav2_dwb_controller | 1.0.12 |
| nav_2d_msgs | 1.0.12 |
| nav_2d_utils | 1.0.12 |
| nav2_lifecycle_manager | 1.0.12 |
| nav2_map_server | 1.0.12 |
| nav2_msgs | 1.0.12 |
| nav2_navfn_planner | 1.0.12 |
| nav2_planner | 1.0.12 |
| nav2_recoveries | 1.0.12 |
| nav2_regulated_pure_pursuit_controller | 1.0.12 |
| nav2_rotation_shim_controller | 1.0.12 |
| nav2_rviz_plugins | 1.0.12 |
| nav2_simple_commander | 1.0.12 |
| nav2_smac_planner | 1.0.12 |
| nav2_system_tests | 1.0.12 |
| nav2_theta_star_planner | 1.0.12 |
| nav2_util | 1.0.12 |
| nav2_voxel_grid | 1.0.12 |
| nav2_waypoint_follower | 1.0.12 |
| navigation2 | 1.0.12 |
README
Nav2


![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
Build Status
| Service | Dashing | Foxy | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Dashing Source | Dashing Debian | Foxy Source | Foxy Debian |
|---|---|---|---|---|
| Navigation2 | ||||
| nav2_amcl | ||||
| nav2_behavior_tree | ||||
| nav2_bringup | ||||
| nav2_bt_navigator | ||||
| nav2_common | ||||
| nav2_controller | N/A | N/A | ||
| nav2_core | N/A | N/A | ||
| nav2_costmap_2d | ||||
| nav2_dwb_controller | ||||
| nav2_lifecycle_manager | ||||
| nav2_map_server | ||||
| nav2_msgs | ||||
| nav2_navfn_planner | ||||
| nav2_planner | N/A | N/A | ||
| nav2_recoveries | ||||
| nav2_regulated_pure_pursuit | N/A | N/A | ||
| nav2_rviz_plugins | ||||
| nav2_smac_planner | N/A | N/A | ||
| nav2_system_tests | ||||
| nav2_util | ||||
| nav2_waypoint_follower | N/A | N/A |
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 0.4.7 |
| nav2_behavior_tree | 0.4.7 |
| nav2_bringup | 0.4.7 |
| nav2_gazebo_spawner | 0.4.7 |
| nav2_bt_navigator | 0.4.7 |
| nav2_common | 0.4.7 |
| nav2_controller | 0.4.7 |
| nav2_core | 0.4.7 |
| nav2_costmap_2d | 0.4.7 |
| costmap_queue | 0.4.7 |
| dwb_core | 0.4.7 |
| dwb_critics | 0.4.7 |
| dwb_msgs | 0.4.7 |
| dwb_plugins | 0.4.7 |
| nav2_dwb_controller | 0.4.7 |
| nav_2d_msgs | 0.4.7 |
| nav_2d_utils | 0.4.7 |
| nav2_lifecycle_manager | 0.4.7 |
| nav2_map_server | 0.4.7 |
| nav2_msgs | 0.4.7 |
| nav2_navfn_planner | 0.4.7 |
| nav2_planner | 0.4.7 |
| nav2_recoveries | 0.4.7 |
| nav2_regulated_pure_pursuit_controller | 0.4.7 |
| nav2_rviz_plugins | 0.4.7 |
| nav2_system_tests | 0.4.7 |
| nav2_util | 0.4.7 |
| nav2_voxel_grid | 0.4.7 |
| nav2_waypoint_follower | 0.4.7 |
| navigation2 | 0.4.7 |
| smac_planner | 0.4.7 |
README
Navigation 2
![]()
For detailed instructions on how to:
Please visit our documentation site. Please visit our community Slack here.
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
Build Status
| Service | Dashing | Eloquent | Foxy | Master |
|---|---|---|---|---|
| ROS Build Farm | N/A | |||
| Circle CI | N/A | N/A | N/A | |
| Package | Dashing Source | Dashing Debian | Eloquent Source | Eloquent Debian | Foxy Source | Foxy Debian |
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_controller | N/A | N/A | ||||
| nav2_core | N/A | N/A | ||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner | N/A | N/A | ||||
| nav2_recoveries | ||||||
| nav2_rviz_plugins | ||||||
| nav2_system_tests | ||||||
| nav2_util | ||||||
| nav2_waypoint_follower | N/A | N/A |
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-10-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.2.10 |
| nav2_behavior_tree | 1.2.10 |
| nav2_behaviors | 1.2.10 |
| nav2_bringup | 1.2.10 |
| nav2_bt_navigator | 1.2.10 |
| nav2_collision_monitor | 1.2.10 |
| nav2_common | 1.2.10 |
| nav2_constrained_smoother | 1.2.10 |
| nav2_controller | 1.2.10 |
| nav2_core | 1.2.10 |
| nav2_costmap_2d | 1.2.10 |
| costmap_queue | 1.2.10 |
| dwb_core | 1.2.10 |
| dwb_critics | 1.2.10 |
| dwb_msgs | 1.2.10 |
| dwb_plugins | 1.2.10 |
| nav2_dwb_controller | 1.2.10 |
| nav_2d_msgs | 1.2.10 |
| nav_2d_utils | 1.2.10 |
| nav2_lifecycle_manager | 1.2.10 |
| nav2_map_server | 1.2.10 |
| nav2_mppi_controller | 1.2.10 |
| nav2_msgs | 1.2.10 |
| nav2_navfn_planner | 1.2.10 |
| nav2_planner | 1.2.10 |
| nav2_regulated_pure_pursuit_controller | 1.2.10 |
| nav2_rotation_shim_controller | 1.2.10 |
| nav2_rviz_plugins | 1.2.10 |
| nav2_simple_commander | 1.2.10 |
| nav2_smac_planner | 1.2.10 |
| nav2_smoother | 1.2.10 |
| nav2_system_tests | 1.2.10 |
| nav2_theta_star_planner | 1.2.10 |
| nav2_util | 1.2.10 |
| nav2_velocity_smoother | 1.2.10 |
| nav2_voxel_grid | 1.2.10 |
| nav2_waypoint_follower | 1.2.10 |
| navigation2 | 1.2.10 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.

Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use any of the algorithms in Nav2 or the analysis of the algorithms in your work, please cite this work in your papers!
- S. Macenski, T. Moore, DV Lu, A. Merzlyakov, M. Ferguson, From the desks of ROS maintainers: A survey of modern & capable mobile robotics algorithms in the robot operating system 2, Robotics and Autonomous Systems, 2023.
@article{macenski2023survey,
title={From the desks of ROS maintainers: A survey of modern & capable mobile robotics algorithms in the robot operating system 2},
author={S. Macenski, T. Moore, DV Lu, A. Merzlyakov, M. Ferguson},
year={2023},
journal = {Robotics and Autonomous Systems}
}
If you use the Regulated Pure Pursuit Controller algorithm or software from this repository, please cite this work in your papers!
- S. Macenski, S. Singh, F. Martin, J. Gines, Regulated Pure Pursuit for Robot Path Tracking. Autonomous Robots, 2023.
@article{macenski2023regulated,
title={Regulated Pure Pursuit for Robot Path Tracking},
author={Steve Macenski and Shrijit Singh and Francisco Martin and Jonatan Gines},
year={2023},
journal = {Autonomous Robots}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-06-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nav2_amcl | 1.1.20 |
| nav2_behavior_tree | 1.1.20 |
| nav2_behaviors | 1.1.20 |
| nav2_bringup | 1.1.20 |
| nav2_bt_navigator | 1.1.20 |
| nav2_collision_monitor | 1.1.20 |
| nav2_common | 1.1.20 |
| nav2_constrained_smoother | 1.1.20 |
| nav2_controller | 1.1.20 |
| nav2_core | 1.1.20 |
| nav2_costmap_2d | 1.1.20 |
| costmap_queue | 1.1.20 |
| dwb_core | 1.1.20 |
| dwb_critics | 1.1.20 |
| dwb_msgs | 1.1.20 |
| dwb_plugins | 1.1.20 |
| nav2_dwb_controller | 1.1.20 |
| nav_2d_msgs | 1.1.20 |
| nav_2d_utils | 1.1.20 |
| nav2_graceful_controller | 1.1.20 |
| nav2_lifecycle_manager | 1.1.20 |
| nav2_map_server | 1.1.20 |
| nav2_mppi_controller | 1.1.20 |
| nav2_msgs | 1.1.20 |
| nav2_navfn_planner | 1.1.20 |
| nav2_planner | 1.1.20 |
| nav2_regulated_pure_pursuit_controller | 1.1.20 |
| nav2_rotation_shim_controller | 1.1.20 |
| nav2_route | 1.1.20 |
| nav2_rviz_plugins | 1.1.20 |
| nav2_simple_commander | 1.1.20 |
| nav2_smac_planner | 1.1.20 |
| nav2_smoother | 1.1.20 |
| nav2_system_tests | 1.1.20 |
| nav2_theta_star_planner | 1.1.20 |
| nav2_util | 1.1.20 |
| nav2_velocity_smoother | 1.1.20 |
| nav2_voxel_grid | 1.1.20 |
| nav2_waypoint_follower | 1.1.20 |
| navigation2 | 1.1.20 |
README
Nav2
![]()
![]()
![]()
For detailed instructions on how to:
- Getting Started
- Concepts
- Build
- Install
- General Tutorials and Algorithm Developer Tutorials
- Configure
- Navigation Plugins
- Migration Guides
- Container Images for Building Nav2
- Contribute
Please visit our documentation site. Please visit our community Slack here (if this link does not work, please contact maintainers to reactivate).
If you need professional services related to Nav2, please contact Open Navigation at info@opennav.org.
Our Sponsors
Please thank our amazing sponsors for their generous support of Nav2 on behalf of the community to allow the project to continue to be professionally maintained, developed, and supported for the long-haul! Open Navigation LLC provides project leadership, maintenance, development, and support services to the Nav2 & ROS community.
Dexory develops robotics and AI logistics solutions to drive better business decisions using a digital twin of warehouses to provide inventory insights.
Polymath Robotics creates safety-critical navigation systems for industrial vehicles that are radically simple to enable and deploy.
Stereolabs produces the high-quality ZED stereo cameras with a complete vision pipeline from neural depth to SLAM, 3D object tracking, AI and more.
Confidential is just happy to support Nav2’s mission!
Citation
If you use the navigation framework, an algorithm from this repository, or ideas from it please cite this work in your papers!
- S. Macenski, F. Martín, R. White, J. Clavero. The Marathon 2: A Navigation System. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020.
@InProceedings{macenski2020marathon2,
title = {The Marathon 2: A Navigation System},
author = {Macenski, Steve and Martín, Francisco and White, Ruffin and Ginés Clavero, Jonatan},
year = {2020},
booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://github.com/ros-planning/navigation2},
pdf = {https://arxiv.org/abs/2003.00368}
}
If you use our work on VSLAM and formal comparisons for service robot needs, please cite the paper:
- A. Merzlyakov, S. Macenski. A Comparison of Modern General-Purpose Visual SLAM Approaches. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@InProceedings{vslamComparison2021,
title = {A Comparison of Modern General-Purpose Visual SLAM Approaches},
author = {Merzlyakov, Alexey and Macenski, Steven},
year = {2021},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pdf = {https://arxiv.org/abs/2107.07589}
}
Build Status
| Service | Foxy | Humble | Main |
|---|---|---|---|
| ROS Build Farm | N/A | ||
| Circle CI | N/A | N/A | |
| Package | Foxy Source | Foxy Debian | Humble Source | Humble Debian | ||
|---|---|---|---|---|---|---|
| Navigation2 | ||||||
| nav2_amcl | ||||||
| nav2_behavior_tree | ||||||
| nav2_{recoveries, behaviors} | ||||||
| nav2_bringup | ||||||
| nav2_bt_navigator | ||||||
| nav2_common | ||||||
| nav2_constrained_smoother | N/A | N/A | N/A | N/A | ||
| nav2_controller | ||||||
| nav2_core | ||||||
| nav2_costmap_2d | ||||||
| nav2_dwb_controller | ||||||
| nav2_lifecycle_manager | ||||||
| nav2_map_server | ||||||
| nav2_msgs | ||||||
| nav2_navfn_planner | ||||||
| nav2_planner |
File truncated at 100 lines see the full file