
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
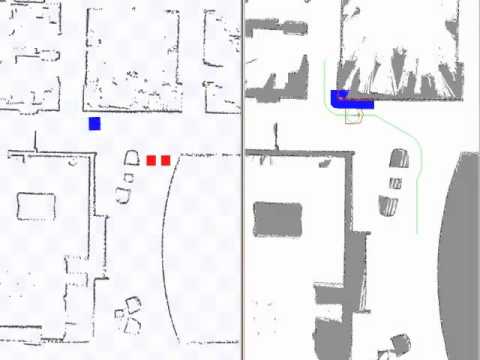
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | lunar-devel |
| Last Updated | 2019-03-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-06-19 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
- The path to a motion primitive file. This MUST be specified by the user for
the planner to work. There is an example motion primitive file that can be
used in
matlab/mprim/pr2.mprimin the SBPL package. If you want to generate your own motion primitive file to match the kinematics of your robot or your
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.2.2 (2019-10-15)
- Add READMEs
- Contributors: Martin Günther
0.2.1 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Ignore SBPL compile warning (#31)
- Fix example config for TF2 (#30)
- Update to tf2, add dependency
- Contributors: Jonathan Meyer, Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.3.6 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | melodic-devel |
| Last Updated | 2022-08-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
~/SBPLLatticePlanner/footprint_markers (visualization_msgs/Marker)
- The footprint markers along the planned path (for visualization in RViz).
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.3.6 (2022-08-24)
- Implement allow_unknown feature (#60)
- debug move_base launch files: Fix warnings, track unknown space
- Contributors: Martin Günther, Martin Peris
0.3.5 (2022-03-07)
- Add option to publish the sbpl footprint plan (#58)
- Contributors: Lotfi Zeghmi, Martin Günther
0.3.4 (2020-06-19)
- Initial release into noetic
- Set cmake_policy CMP0048 to fix warning
- Contributors: Martin Günther
0.3.3 (2019-10-15)
- Add READMEs
- Contributors: Martin Günther
0.3.2 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Fix example config for TF2 (#30)
- sbpl_lattice_planner: Add missing DEPENDS SBPL
- Contributors: Jonathan Meyer, Martin Günther
0.3.1 (2018-09-05)
0.3.0 (2018-09-04)
- sbpl_lattice_planner: Update to tf2, add dependency
- Use non deprecated pluginlib macro + headers
- Contributors: Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf | |
| tf2 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sbpl_lattice_planner at Robotics Stack Exchange
|
|
sbpl_lattice_planner package from navigation_experimental repoassisted_teleop goal_passer navigation_experimental pose_base_controller pose_follower sbpl_lattice_planner sbpl_recovery twist_recovery |
ROS Distro
|
Package Summary
| Version | 0.4.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation_experimental.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2022-08-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Martin Günther
Authors
- Michael Phillips
sbpl_lattice_planner
The sbpl_lattice_planner is a global planner plugin for
move_base and wraps the
SBPL search-based planning library.
Paths are generated by combining a series of “motion primitives” which are
short, kinematically feasible motions. Planning is therefore done in x, y, and
theta dimensions, resulting in smooth paths that take robot orientation into
account, which is especially important if the robot is not assumed to be
circular or has nonholonomic constraints (e.g., the robot cannot move
sideways). Plans can be found using the ARA* planner or AD* planner from the
SBPL library.
Video
How to use
This global planner can be used with move_base simply by setting the
base_global_planner parameter to SBPLLatticePlanner. Additionally, at the
very least the path to a motion primitive file must be specified shown below in
the list of parameters.
Example in Stage
The package contains a launch file for testing the sbpl_lattice_planner as
the global planner for move_base using stage for 2D simulation:
roslaunch sbpl_lattice_planner move_base_sbpl_fake_localization_2.5cm.launch
ROS API
Published Topics
~/SBPLLatticePlanner/plan (nav_msgs/Path)
- The last plan computed by SBPL, published every time the planner computes a new path, and used primarily for visualization purposes.
~/SBPLLatticePlanner/sbpl_lattice_planner_stats (sbpl_lattice_planner/SBPLLatticePlannerStats)
- Statistics from the last planning request. Stats include: time taken to get to the first and final solutions, number of state expansions taken to get the first and final solutions, the epsilon (bound on the sub-optimality of the solution) of the first and final solutions, and the size of the final solution.
~/SBPLLatticePlanner/footprint_markers (visualization_msgs/Marker)
- The footprint markers along the planned path (for visualization in RViz).
Subscribed Topics
None
Services
None
Parameters
~/SBPLLatticePlanner/planner_type (string, default: “ARAPlanner”)
- Specifies which planner to use. It can either be “ARAPlanner” for
ARA*or “ADPlanner” forAD*.
~/SBPLLatticePlanner/allocated_time (double, default: 10.0)
- The amount of time given to the planner to find a solution. If there is still time remaining after the planner finds its sub-optimal initial solution (specified by “initial_epsilon”), the planner will use up remaining time improving the solution until it is optimal or until time runs out (whichever comes first).
~/SBPLLatticePlanner/initial_epsilon (double, default: 3.0)
- The value the heuristic is scaled by for the first search. This value must be greater or equal to 1. The larger this value is, the faster the search tends to find a solution (likely sub-optimal if epsilon is larger than 1). After the first search, the planner will continue to reduce the epsilon value until it is 1 (optimal search).
~/SBPLLatticePlanner/environment_type (string, default: “XYThetaLattice”))
- The type of environment being searched. Currently, XYThetaLattice is the only supported environment.
~/SBPLLatticePlanner/forward_search (bool, default: false)
- The direction the search is done in. If you are using
AD*, you should use backward search for fast replanning times. ForARA*it doesn’t matter too much which direction you use.
~/SBPLLatticePlanner/primitive_filename (string, default: “”)
File truncated at 100 lines see the full file
Changelog for package sbpl_lattice_planner
0.4.1 (2022-08-24)
- Implement allow_unknown feature (#60)
- debug move_base launch files: Fix warnings, track unknown space
- Contributors: Martin Günther, Martin Peris
0.4.0 (2022-03-07)
- Add option to publish the sbpl footprint plan (#58)
- Contributors: Lotfi Zeghmi, Martin Günther
0.3.4 (2020-06-19)
- Initial release into noetic
- Set cmake_policy CMP0048 to fix warning
- Contributors: Martin Günther
0.3.3 (2019-10-15)
- Add READMEs
- Contributors: Martin Günther
0.3.2 (2019-01-16)
- Reinit on map size, footprint and costmap changes
- Add warning when cost_scaling_factor is too large Also see #33.
- Fix example config for TF2 (#30)
- sbpl_lattice_planner: Add missing DEPENDS SBPL
- Contributors: Jonathan Meyer, Martin Günther
0.3.1 (2018-09-05)
0.3.0 (2018-09-04)
- sbpl_lattice_planner: Update to tf2, add dependency
- Use non deprecated pluginlib macro + headers
- Contributors: Martin Günther
0.2.0 (2018-09-03)
- Initial release into indigo, kinetic, lunar and melodic
- Contributors: Martin Günther, David V. Lu!!, Dave Hershberger, E. Gil Jones, Eitan Marder-Eppstein, Felix Widmaier, Johannes Meyer, Jon Binney, Vincent Rabaud, Austin Hendrix
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| catkin | |
| message_runtime | |
| costmap_2d | |
| geometry_msgs | |
| nav_core | |
| nav_msgs | |
| pluginlib | |
| roscpp | |
| sbpl | |
| tf | |
| tf2 |