
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-06-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
- Kazushi Kurasawa
raspimouse_description
![]()
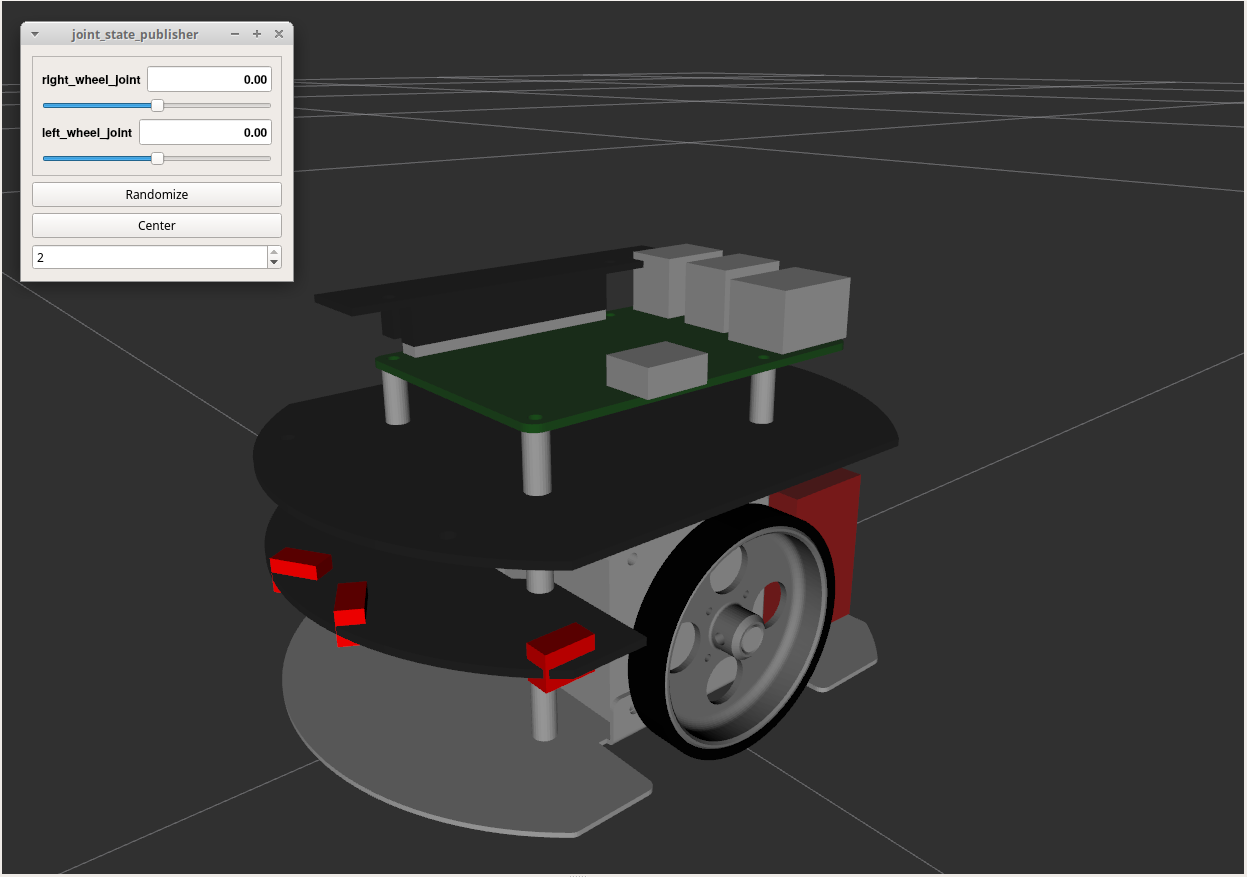
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim. See details from rt-net/raspimouse_sim#42.
Table of Contents
Supported ROS distributions
ROS 2
Requirements
- Raspberry Pi Mouse
- Linux OS
- Ubuntu Desktop 24.04
- ROS 2
Installation
Binary Installation
sudo apt install ros-$ROS_DISTRO-raspimouse-description
Source Build
# Create workspace directory
mkdir -p ~/ros2_ws/src && cd ~/ros2_ws/src
# Clone package
git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_description
# Install dependencies
rosdep install -r -y -i --from-paths .
# Build & Install
cd ~/ros2_ws
colcon build --symlink-install
source ~/ros2_ws/install/setup.bash
QuickStart
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
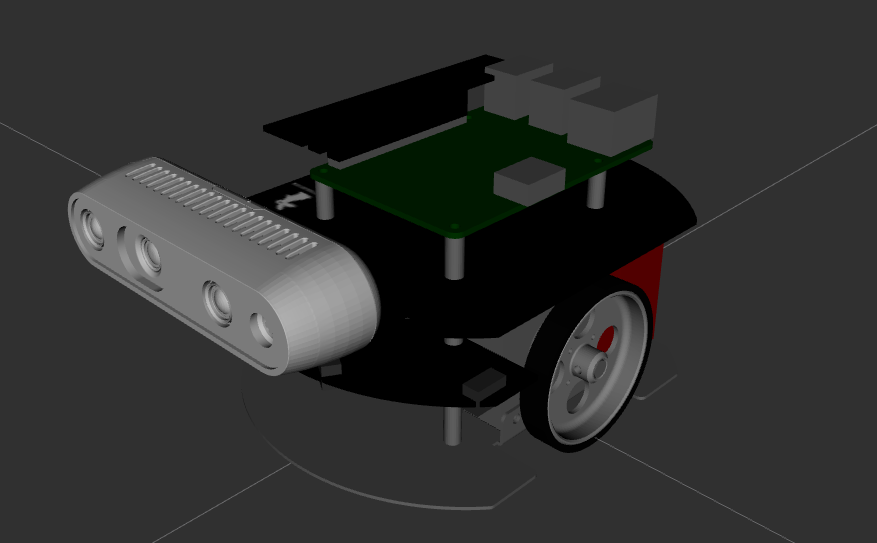
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
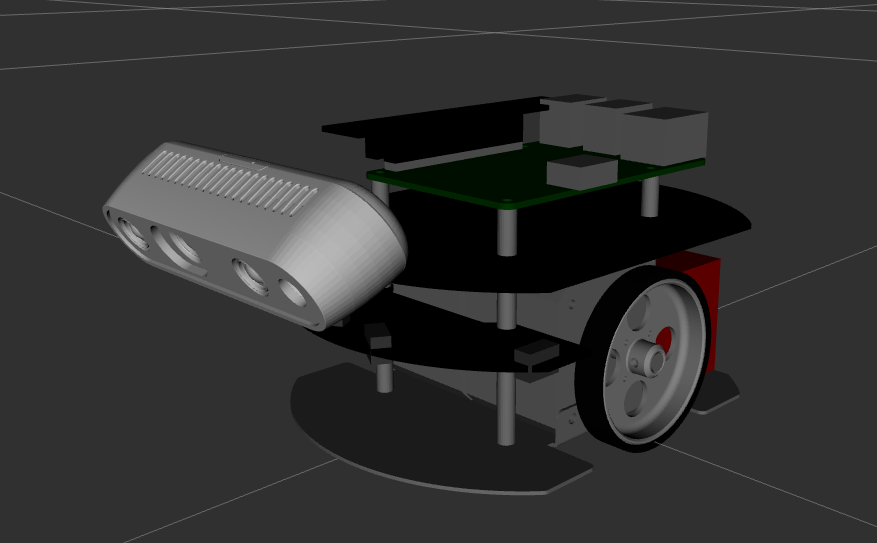
Similarly, display an RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
The RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
File truncated at 100 lines see the full file
Changelog for package raspimouse_description
2.0.0 (2024-11-08)
- Support ROS 2 Jazzy (#55) Co-authored-by: Kazushi Kurasawa <<Kurasawa@rt-net.jp>>
- Replace [ign]{.title-ref} to [gz]{.title-ref}
- Updated the remapping for subscription to reflect the removal of [unstamped]{.title-ref} from ros2_controllers
- Contributors: YusukeKato
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| gz_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2022-07-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Shuhei Kozasa
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
-
Kinetic (deprecatedkinetic-devel) - Melodic (
melodic-devel) - Foxy (
foxy-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
LICENSE
(C) 2016-2021 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_sim reporaspimouse_control raspimouse_description raspimouse_gazebo raspimouse_sim |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_sim.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2018-11-10 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Daisuke Sato
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_sim |
Launch files
- launch/display_urdf.launch
-
- model [default: $(find raspimouse_description)/urdf/raspimouse.urdf]
- rvizconfig [default: $(find raspimouse_description)/launch/config/urdf.rviz]
- gui [default: True]
- launch/display_xacro.launch
-
- model [default: $(find raspimouse_description)/robots/raspimouse.urdf.xacro]
- rvizconfig [default: $(find raspimouse_description)/launch/config/urdf.rviz]
- gui [default: true]
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | MIT |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Shota Aoki
- Yusuke Kato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
Changelog for package raspimouse_description
1.2.0 (2024-03-05)
- シミュレータ環境でscanトピックをpublish (#52)
- camera_downwardがtrueのときRGBカメラが斜め下を向くように変更 (#50) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.1.0 (2023-11-07)
- READMEにRGBカメラを表示するコマンドを追記 (#47)
- Gazebo上で画像トピックを配信できるように変更 (#46)
- RGBカメラのモデルを表示できるように変更 (#45) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- cmd_velとodomのトピック名をremapping (#44)
- controller managerが起動するように変更 (#43) Co-authored-by: Shota Aoki <<s.aoki@rt-net.jp>>
- robot_description_loaderを実装 (#42) Co-authored-by: Daisuke Sato <<daisuke.sato@rt-net.jp>>
- Contributors: YusukeKato
1.0.1 (2023-01-31)
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz2 | |
| urdf | |
| xacro | |
| launch | |
| ign_ros2_control | |
| realsense2_description |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-12-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Daisuke Sato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
-
Kinetic (deprecatedkinetic-devel) - Melodic (
melodic-devel) - Foxy (
foxy-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/catkin_ws/src
git clone https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/catkin_ws
catkin_make
source devel/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz with the following comand:
roslaunch raspimouse_description display_xacro.launch
LICENSE
(C) 2016-2020 RT Corporation <shop@rt-net.jp>
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
Changelog for package raspimouse_description
0.1.0 (2022-12-06)
- ROS 1 first release
- Contributors: Daisuke Sato, Shota Aoki
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz | |
| urdf | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo |
Launch files
- launch/display_urdf.launch
-
- model [default: $(find raspimouse_description)/urdf/raspimouse.urdf]
- rvizconfig [default: $(find raspimouse_description)/launch/config/urdf.rviz]
- gui [default: true]
- launch/display_xacro.launch
-
- model [default: $(find raspimouse_description)/urdf/raspimouse.urdf.xacro]
- rvizconfig [default: $(find raspimouse_description)/launch/config/urdf.rviz]
- use_rviz [default: true]
- gui [default: true]
- urg [default: false]
- lidar_frame [default: laser]
- xacro_option [default: ]
- namespace [default: /]
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-12-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Daisuke Sato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
-
Kinetic (deprecatedkinetic-devel) - Melodic (
melodic-devel) - Foxy (
foxy-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/catkin_ws/src
git clone https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/catkin_ws
catkin_make
source devel/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz with the following comand:
roslaunch raspimouse_description display_xacro.launch
LICENSE
(C) 2016-2020 RT Corporation <shop@rt-net.jp>
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
Changelog for package raspimouse_description
0.1.0 (2022-12-06)
- ROS 1 first release
- Contributors: Daisuke Sato, Shota Aoki
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz | |
| urdf | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_gazebo |
Launch files
- launch/display_urdf.launch
-
- model [default: $(find raspimouse_description)/urdf/raspimouse.urdf]
- rvizconfig [default: $(find raspimouse_description)/launch/config/urdf.rviz]
- gui [default: true]
- launch/display_xacro.launch
-
- model [default: $(find raspimouse_description)/urdf/raspimouse.urdf.xacro]
- rvizconfig [default: $(find raspimouse_description)/launch/config/urdf.rviz]
- use_rviz [default: true]
- gui [default: true]
- urg [default: false]
- lidar_frame [default: laser]
- xacro_option [default: ]
- namespace [default: /]
Messages
Services
Plugins
Recent questions tagged raspimouse_description at Robotics Stack Exchange
|
|
raspimouse_description package from raspimouse_description reporaspimouse_description |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2022-12-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Daisuke Sato
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
-
Kinetic (deprecatedkinetic-devel) - Melodic (
melodic-devel) - Foxy (
foxy-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/catkin_ws/src
git clone https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/catkin_ws
catkin_make
source devel/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz with the following comand:
roslaunch raspimouse_description display_xacro.launch
LICENSE
(C) 2016-2020 RT Corporation <shop@rt-net.jp>
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
Changelog for package raspimouse_description
0.1.0 (2022-12-06)
- ROS 1 first release
- Contributors: Daisuke Sato, Shota Aoki
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| joint_state_publisher_gui | |
| joint_state_publisher | |
| robot_state_publisher | |
| rviz | |
| urdf | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse | |
| raspimouse_bringup | |
| raspimouse_control |
Launch files
- launch/display_urdf.launch
-
- model [default: $(find raspimouse_description)/urdf/raspimouse.urdf]
- rvizconfig [default: $(find raspimouse_description)/launch/config/urdf.rviz]
- gui [default: true]
- launch/display_xacro.launch
-
- model [default: $(find raspimouse_description)/urdf/raspimouse.urdf.xacro]
- rvizconfig [default: $(find raspimouse_description)/launch/config/urdf.rviz]
- use_rviz [default: true]
- gui [default: true]
- urg [default: false]
- lidar_frame [default: laser]
- xacro_option [default: ]
- namespace [default: /]