
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-03-06 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| raspimouse_description | 1.2.0 |
README
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
- Melodic (
melodic-devel) - Foxy (
foxy-devel) - Humble (
humble-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
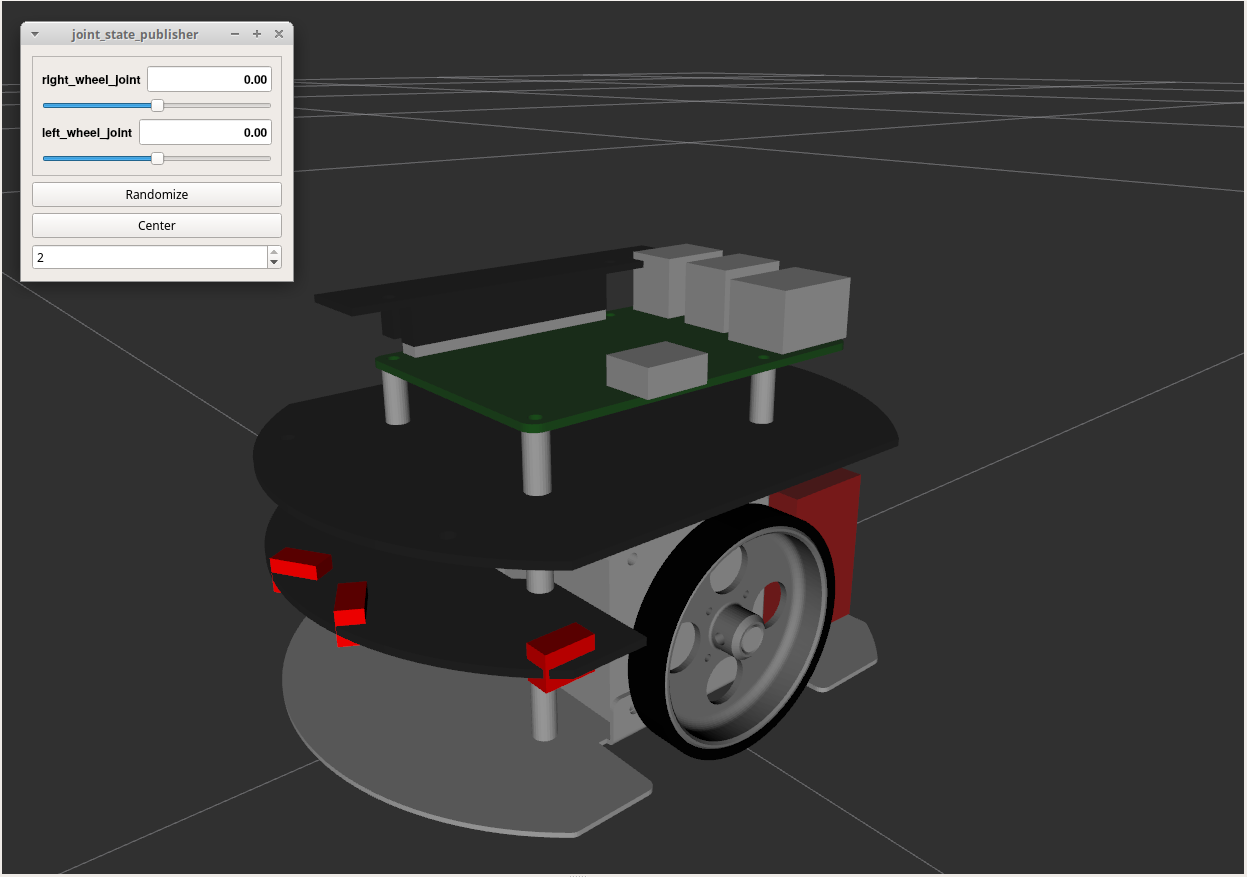
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
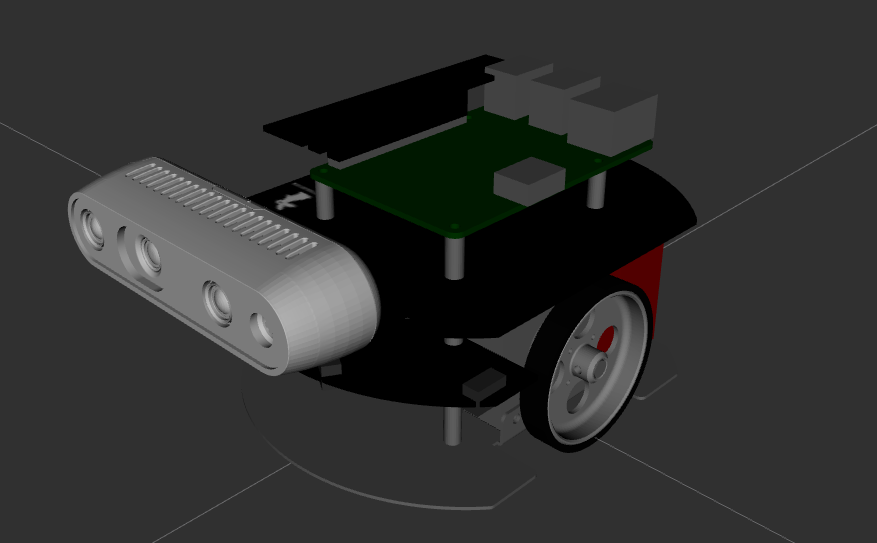
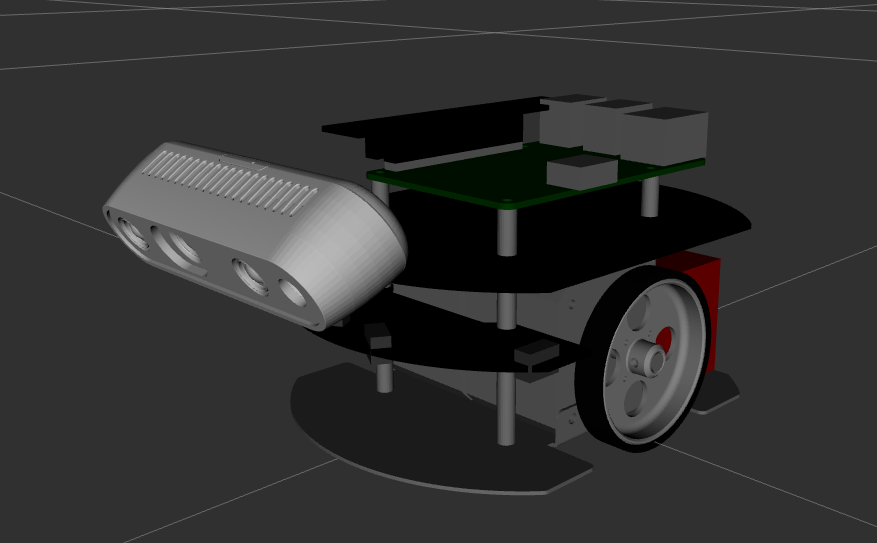
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
CONTRIBUTING
Contribution Guide
本リポジトリへのコントリビュート方法について記載しています。
Issues
リポジトリの品質向上にご協力頂きありがとうございます。
Issueの作成を簡単にするテンプレートを用意しているので活用してください。
Pull Requests
Pull Requestの作成ありがとうございます。 提出したPull Request(PR)には次のルールが適用されます。
- PRの内容には本リポジトリのライセンス(LICENSEとREADME.mdに記載されています)が適用されます
- PRは
rt-netのメンバーによるレビューを経てからマージされます- すべてのPRがマージされるわけではなく、希望に添えない場合もありますのでご容赦ください
- リポジトリにテストが設定されている場合はできるだけテストを通してください
- 何かしらの理由(テストに間違いがある場合など)でテストを通さずPRを出す場合はその旨をPRに記載してください
- マージする際にはPR内の全コミットが1つのコミットに
squashされます-
[コミットをスカッシュしてマージする GitHub Docs](https://docs.github.com/ja/pull-requests/collaborating-with-pull-requests/incorporating-changes-from-a-pull-request/about-pull-request-merges#squash-and-merge-your-commits)
-
- 1つのPRでリクエストする変更はできるだけシンプルにしてください
- 異なる内容の変更を含む場合はPRを分割してください
- 例えば、複数の機能追加したり、機能追加とリファクタリングを同時にする場合はそれぞれ別々のPRとしてください
- squashマージしても履歴を辿りやすくするためです
- 異なる内容の変更を含む場合はPRを分割してください
LICENSE
Any contribution that you make to this repository will be under the MIT license, as dictated by that license.
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2024-11-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| raspimouse_description | 2.0.0 |
README
raspimouse_description
![]()
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim. See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
Similarly, display a RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true
RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true
LICENSE
(C) 2016-2022 RT Corporation
This repository is licensed under the MIT license, see LICENSE. Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
CONTRIBUTING
Contribution Guide
本リポジトリへのコントリビュート方法について記載しています。
Issues
リポジトリの品質向上にご協力頂きありがとうございます。
Issueの作成を簡単にするテンプレートを用意しているので活用してください。
Pull Requests
Pull Requestの作成ありがとうございます。 提出したPull Request(PR)には次のルールが適用されます。
- PRの内容には本リポジトリのライセンス(LICENSEとREADME.mdに記載されています)が適用されます
- PRは
rt-netのメンバーによるレビューを経てからマージされます- すべてのPRがマージされるわけではなく、希望に添えない場合もありますのでご容赦ください
- リポジトリにテストが設定されている場合はできるだけテストを通してください
- 何かしらの理由(テストに間違いがある場合など)でテストを通さずPRを出す場合はその旨をPRに記載してください
- マージする際にはPR内の全コミットが1つのコミットに
squashされます-
[コミットをスカッシュしてマージする GitHub Docs](https://docs.github.com/ja/pull-requests/collaborating-with-pull-requests/incorporating-changes-from-a-pull-request/about-pull-request-merges#squash-and-merge-your-commits)
-
- 1つのPRでリクエストする変更はできるだけシンプルにしてください
- 異なる内容の変更を含む場合はPRを分割してください
- 例えば、複数の機能追加したり、機能追加とリファクタリングを同時にする場合はそれぞれ別々のPRとしてください
- squashマージしても履歴を辿りやすくするためです
- 異なる内容の変更を含む場合はPRを分割してください
LICENSE
Any contribution that you make to this repository will be under the MIT license, as dictated by that license.
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2022-07-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| raspimouse_description | 1.0.0 |
README
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
-
Kinetic (deprecatedkinetic-devel) - Melodic (
melodic-devel) - Foxy (
foxy-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/ros2_ws/src
git clone -b $ROS_DISTRO-devel https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.py
You can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidar
The lidar option supports urg, lds, and rplidar.
LICENSE
(C) 2016-2021 RT Corporation
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-12-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| raspimouse_description | 0.1.0 |
README
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
-
Kinetic (deprecatedkinetic-devel) - Melodic (
melodic-devel) - Foxy (
foxy-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/catkin_ws/src
git clone https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/catkin_ws
catkin_make
source devel/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz with the following comand:
roslaunch raspimouse_description display_xacro.launch
LICENSE
(C) 2016-2020 RT Corporation <shop@rt-net.jp>
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-12-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| raspimouse_description | 0.1.0 |
README
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
-
Kinetic (deprecatedkinetic-devel) - Melodic (
melodic-devel) - Foxy (
foxy-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/catkin_ws/src
git clone https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/catkin_ws
catkin_make
source devel/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz with the following comand:
roslaunch raspimouse_description display_xacro.launch
LICENSE
(C) 2016-2020 RT Corporation <shop@rt-net.jp>
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/rt-net/raspimouse_description.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2022-12-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| raspimouse_description | 0.1.0 |
README
raspimouse_description
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim.
See details from rt-net/raspimouse_sim#42.
The main development branch for ROS 1 is master.
The main development branch for ROS 2 is ros2.
Supported ROS distributions
-
Kinetic (deprecatedkinetic-devel) - Melodic (
melodic-devel) - Foxy (
foxy-devel)
Installation
# Clone raspimouse_description and install dependencies
cd ~/catkin_ws/src
git clone https://github.com/rt-net/raspimouse_description
rosdep install -r -y -i --from-paths .
# Build the package
cd ~/catkin_ws
catkin_make
source devel/setup.bash
How to Use
Display a Raspberry Pi Mouse robot model on RViz with the following comand:
roslaunch raspimouse_description display_xacro.launch
LICENSE
(C) 2016-2020 RT Corporation <shop@rt-net.jp>
This repository is licensed under the MIT license, see LICENSE.
Unless attributed otherwise, everything in this repository is under the MIT license.
Acknowledgements
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html