
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
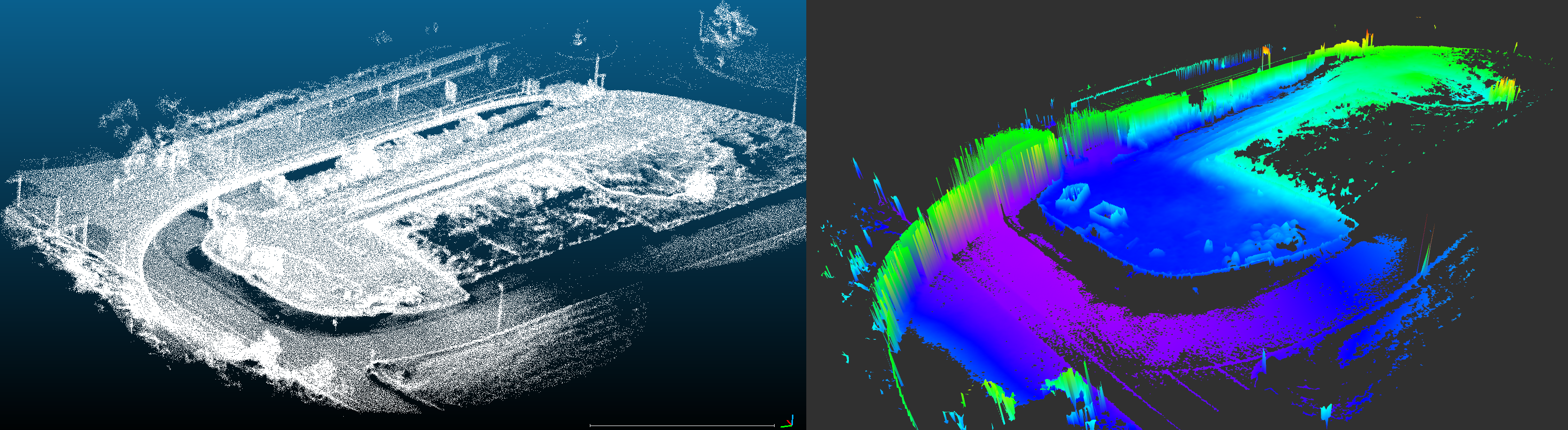
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
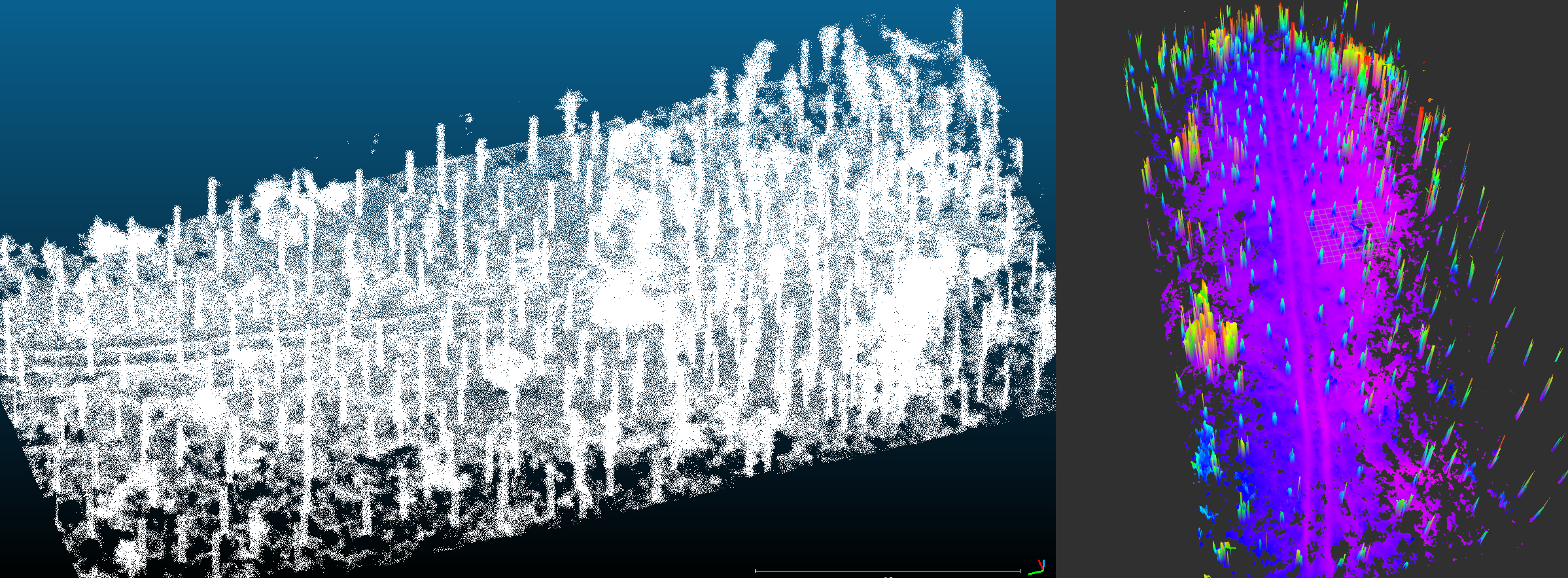
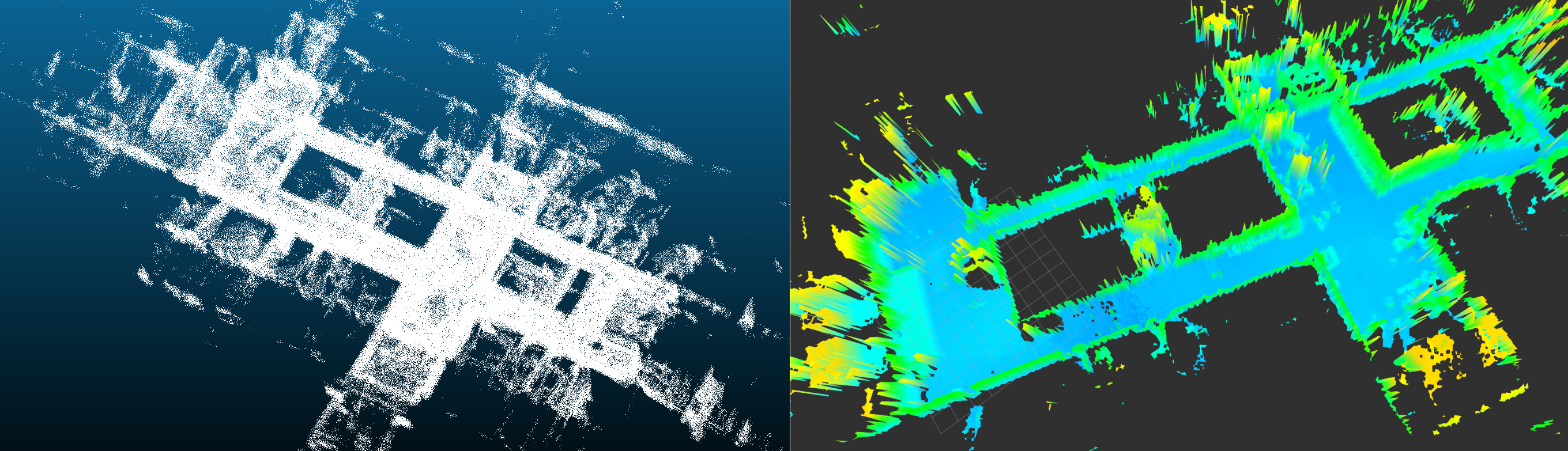
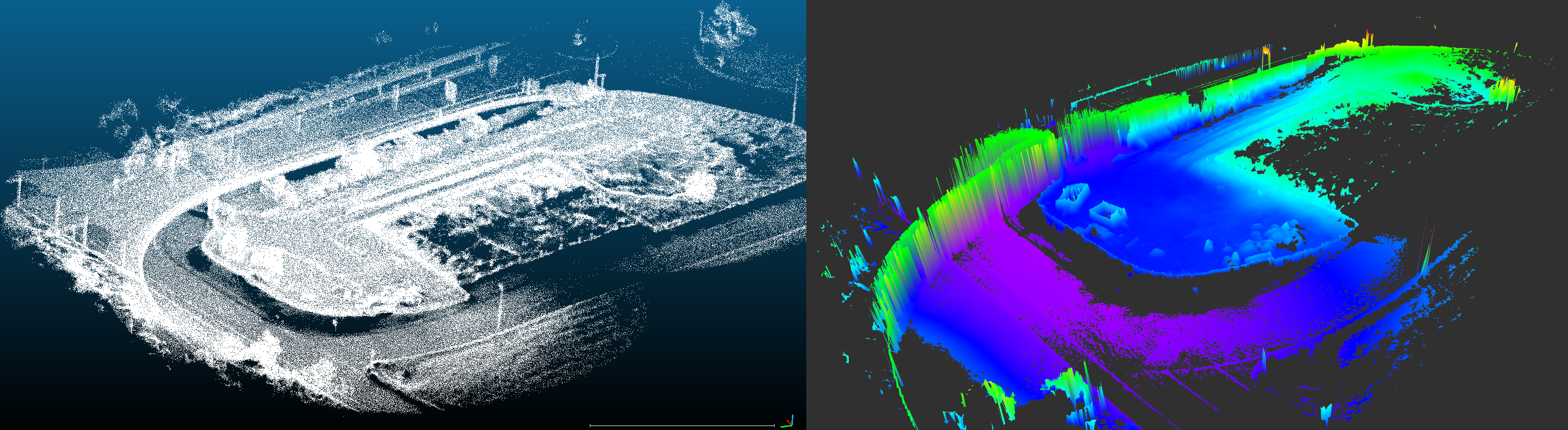
Examples of elevation maps computed from point clouds using this package:
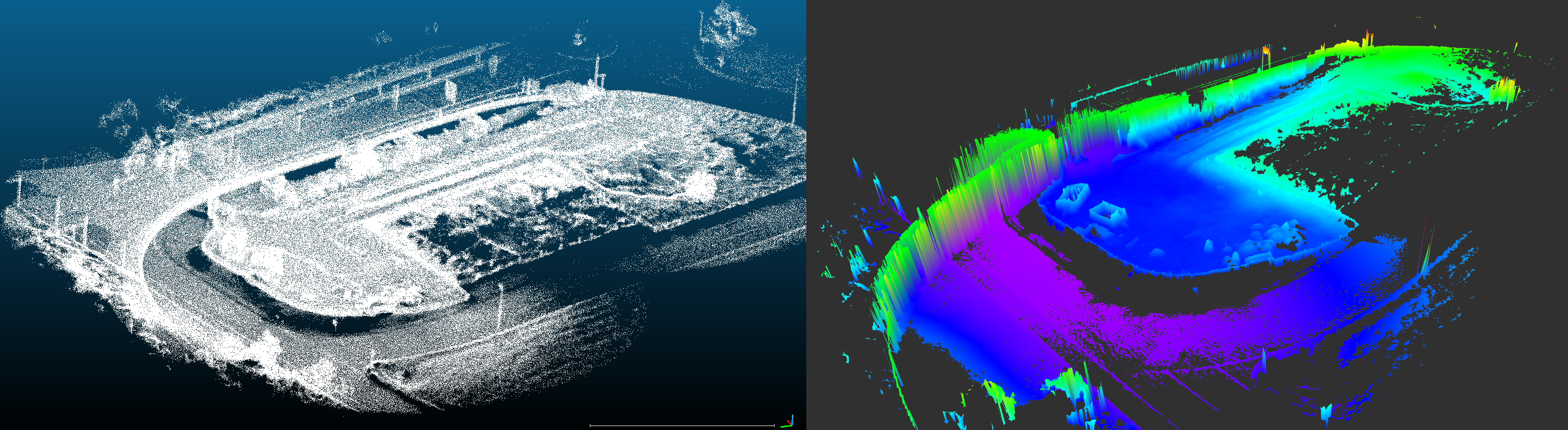
Outdoor dataset example
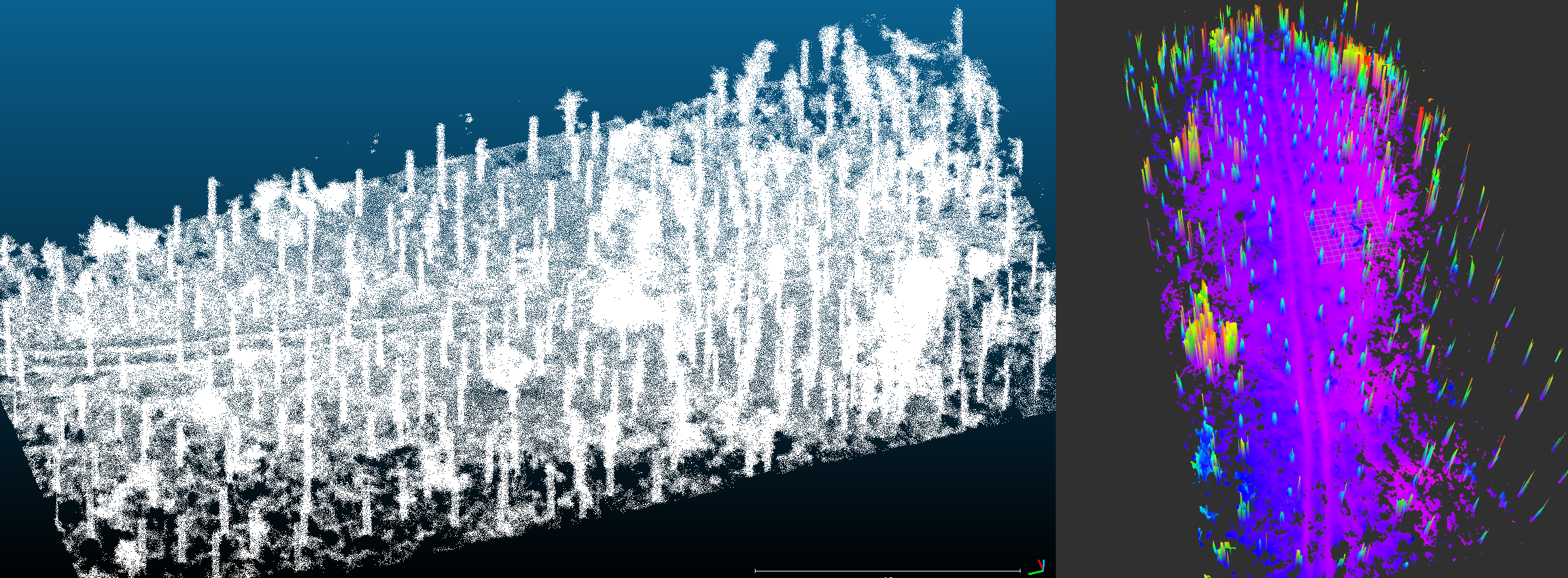
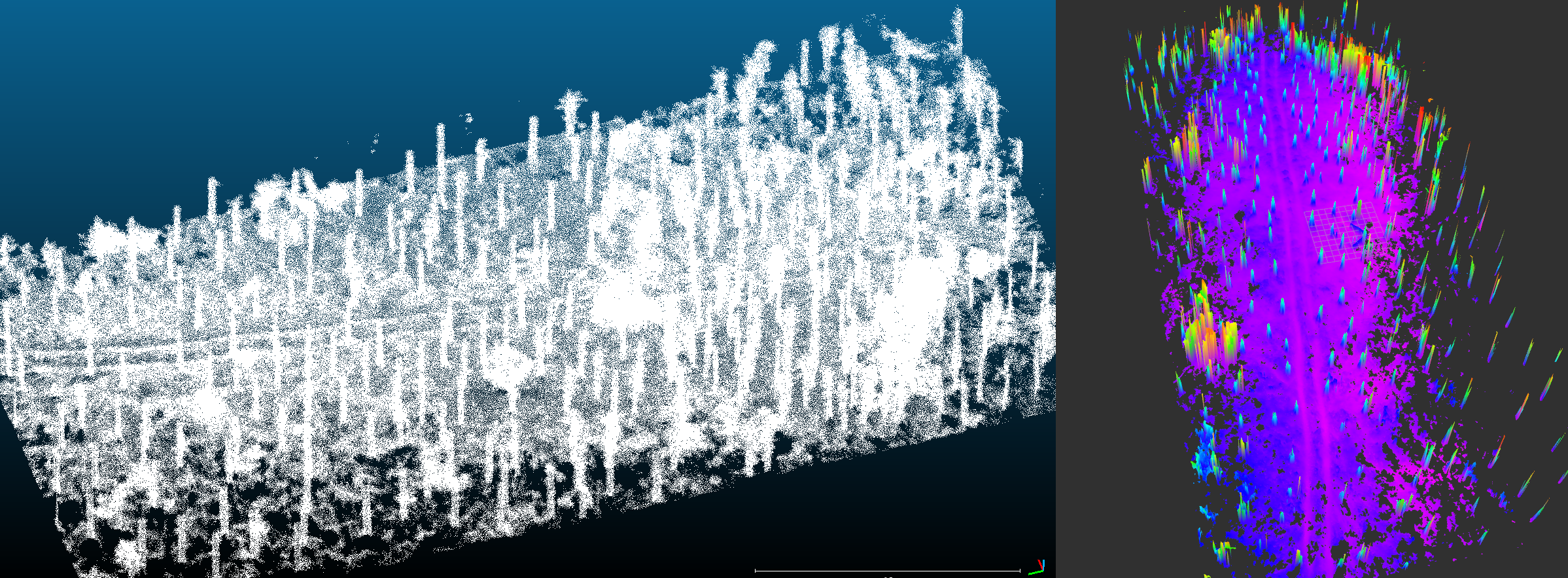
Forest dataset example
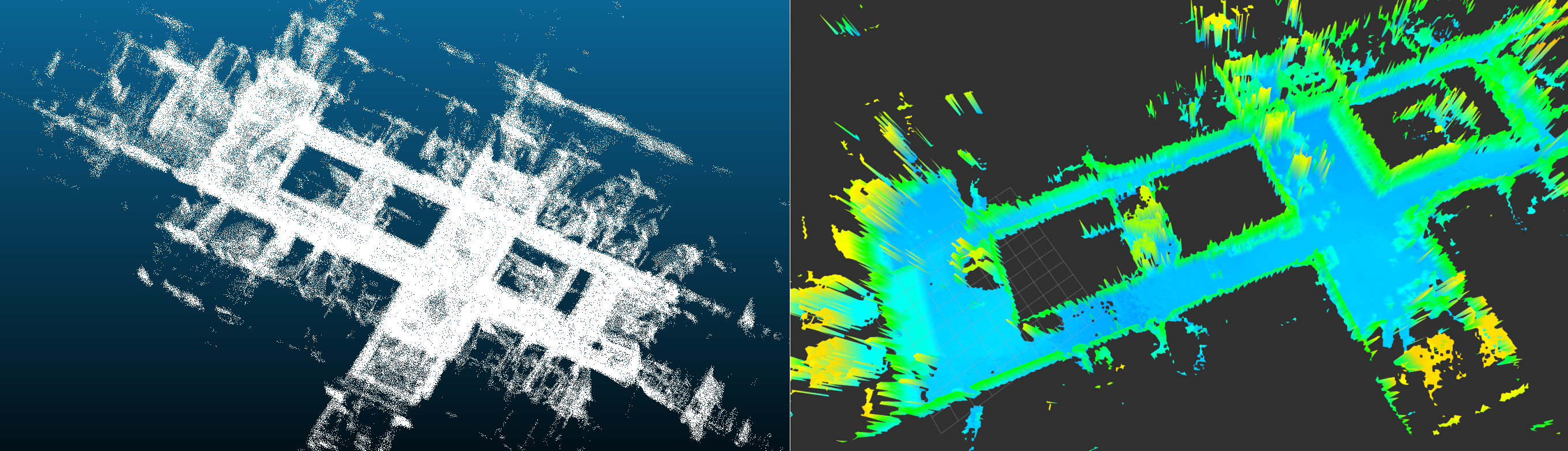
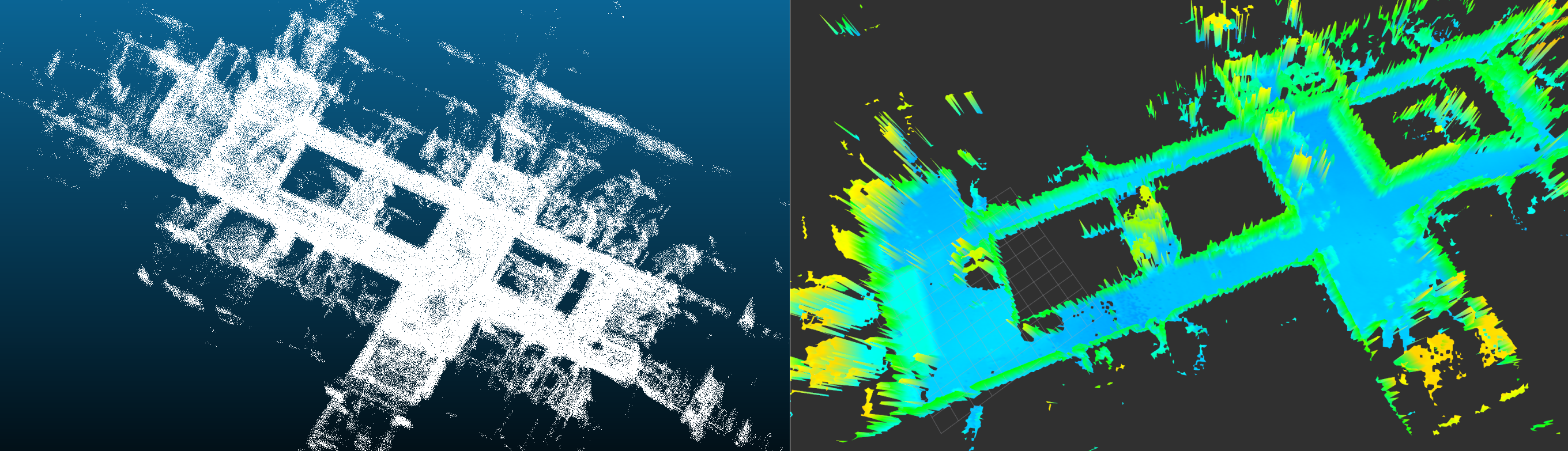
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.2.2 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-09-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.2.2 (2025-09-23)
2.2.1 (2025-01-18)
2.2.0 (2024-07-23)
- Merge pull request #443 from Ryanf55/update-maintainers Add Ryan as maintainer, remove Steve
- Add Ryan as maintainer, remove Steve
- Merge pull request #423 from Ryanf55/export-pcl-deps-correctly Split PCL deps for dev and runtime
- Split PCL deps to dev and runtime
- Contributors: Ryan, Ryan Friedman
2.1.0 (2022-11-08)
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.4.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | kilted |
| Last Updated | 2025-09-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.4.0 (2025-09-14)
2.3.0 (2024-07-29)
2.2.0 (2024-07-23)
- Merge pull request #443 from Ryanf55/update-maintainers Add Ryan as maintainer, remove Steve
- Add Ryan as maintainer, remove Steve
- Merge pull request #423 from Ryanf55/export-pcl-deps-correctly Split PCL deps for dev and runtime
- Split PCL deps to dev and runtime
- Contributors: Ryan, Ryan Friedman
2.1.0 (2022-11-08)
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.1.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2025-01-18 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
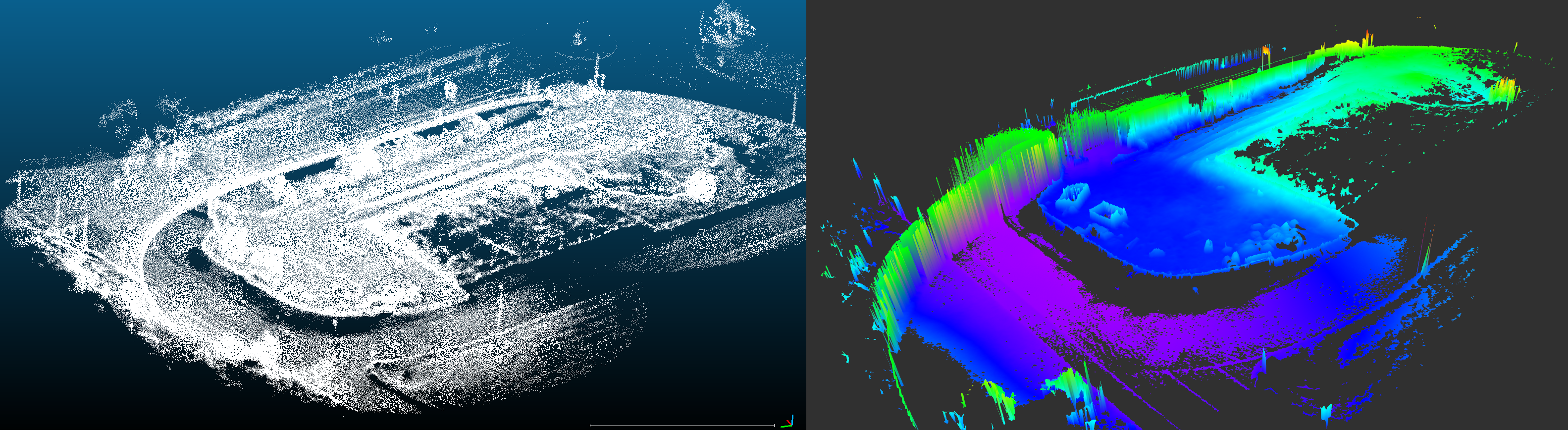
Forest dataset example
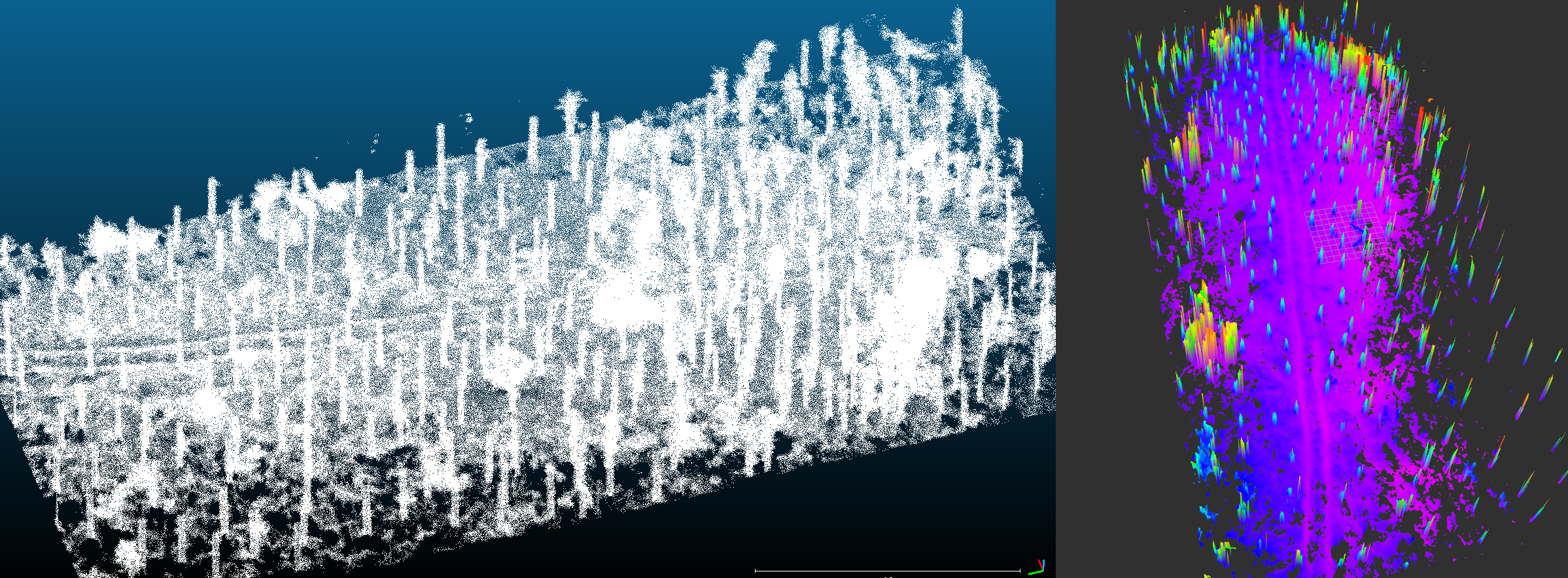
Indoor dataset example
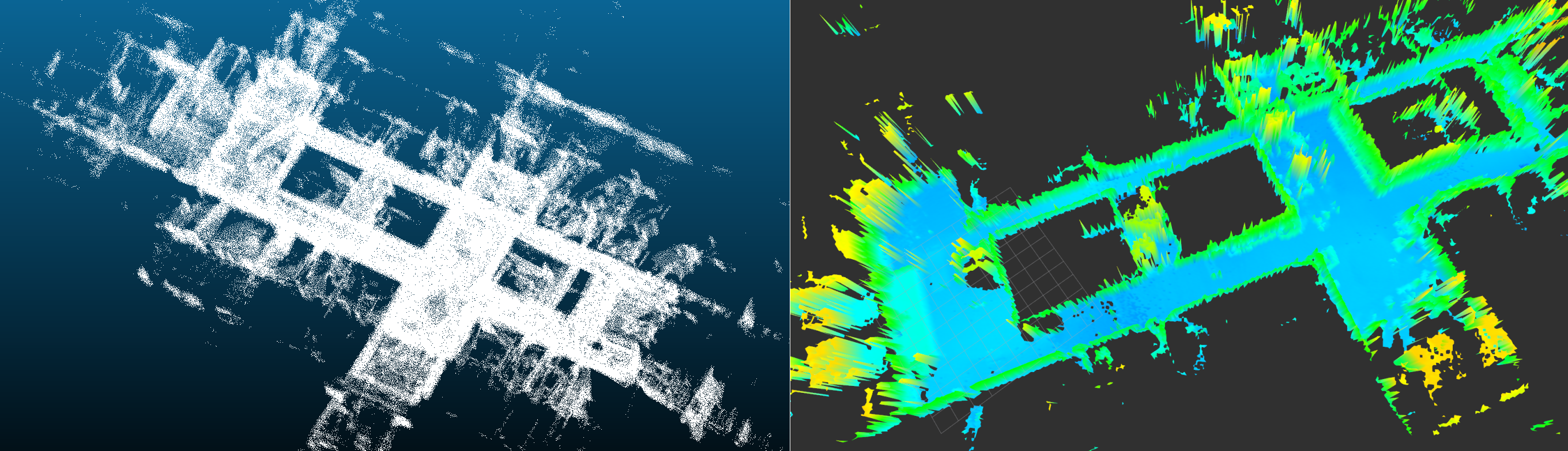
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.1.1 (2025-01-18)
- Merge pull request #444 from ANYbotics/mergify/bp/iron/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #436 from ANYbotics/mergify/bp/iron/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.1.0 (2022-11-08)
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 1.7.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/anybotics/grid_map.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-13 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Guoxiang Zhou
- Mathieu Agostinucci
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest or highest cluster (min/max z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Publications
The code for point cloud to grid map conversion has been developed as a part of research on autonomous precision harvesting. If you are using the point cloud to grid map conversion, please add the following citation to your publication:
Jelavic, E., Jud, D., Egli, P. and Hutter, M., 2021. Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester.
@article{jelavic2021towards,
title={Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester},
author={Jelavic, Edo and Jud, Dominic and Egli, Pascal and Hutter, Marco},
journal={Field Robotics},
year={2021},
publisher={Wiley}
}
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
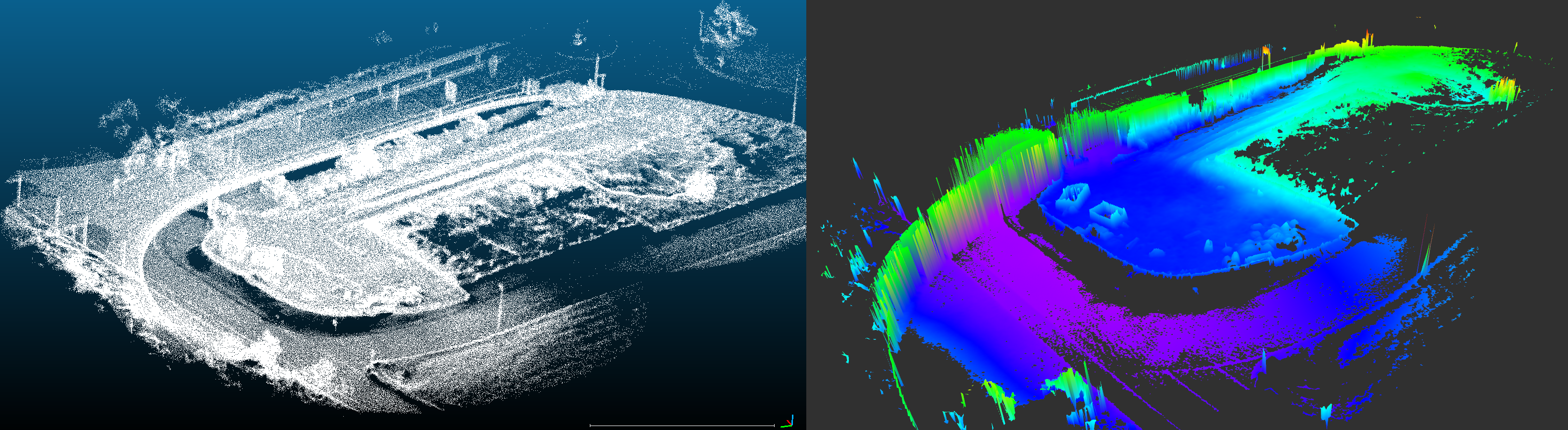
Forest dataset example
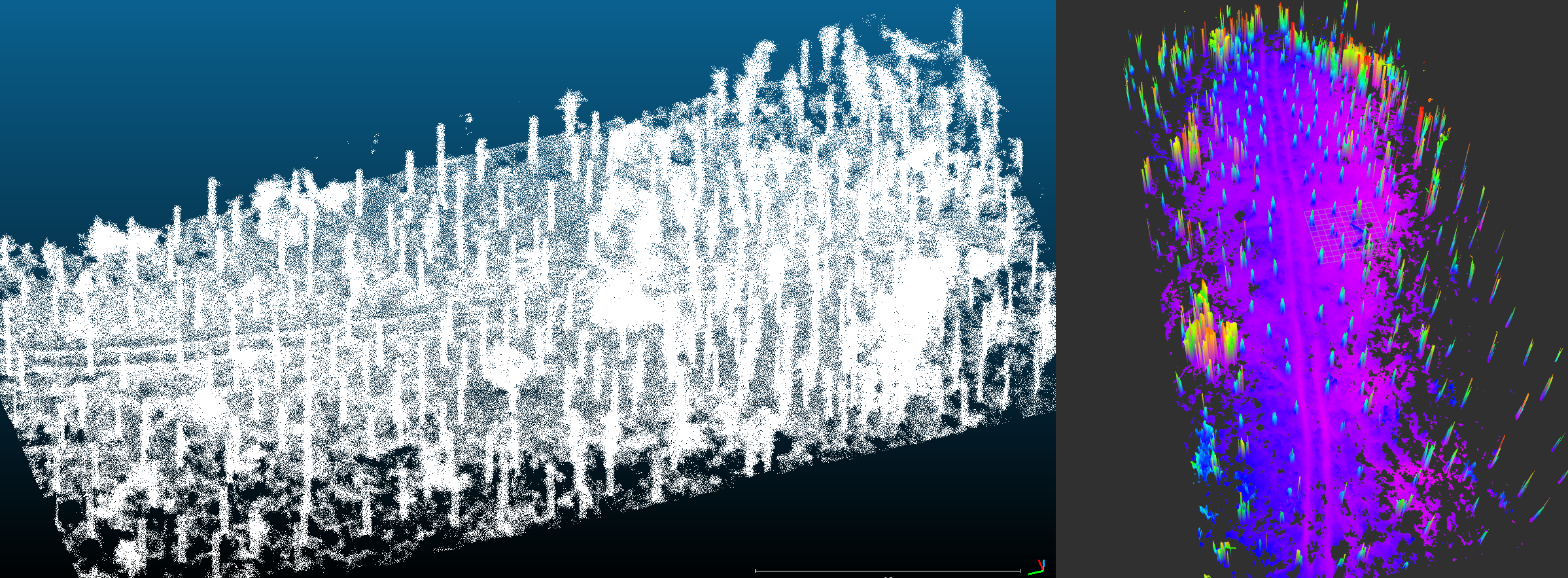
Indoor dataset example
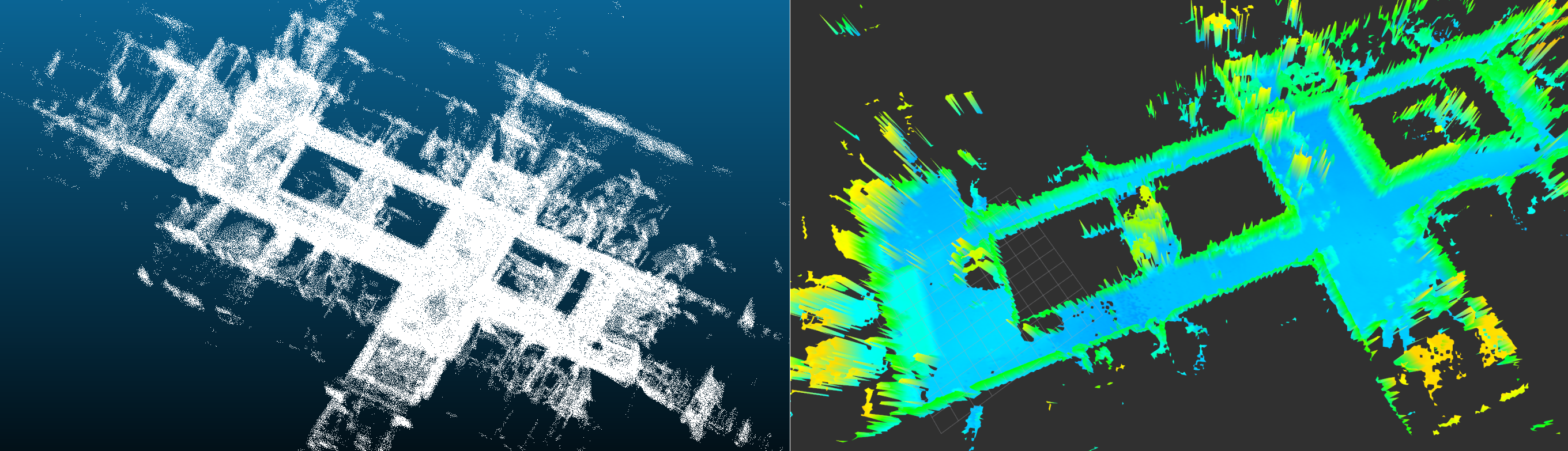
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place your
.pcdfile in the package folder or anywhere on the system (e.g./.../grid_map_pcl/data/example.pcd). - Modify the
pcd_filenameinside the launch file such that it points to the.pcdfile you would like to process (e.g./.../grid_map_pcl/data/example.pcd). Set theoutput_grid_mapvariable to point to the location where you wish to save the resulting grid map (e.g./.../grid_map_pcl/data/example_grid_map.bag) - Change the
configFilePath_variable in the launch file to point to the.yamlfile with configuration parameters (e.g./.../grid_map_pcl/config/parameters.yaml) - You can run the algorithm with:
roslaunch grid_map_pcl grid_map_pcl_loader_node.launch - Once the algorithm is done you will see the output in the console, and it should visualize the point cloud and the grid map in rviz. If that does not happen, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where
grid_map_pcl_loader_nodeis running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in to the location pointed by output_grid_map variable in the launch file. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/max_num_points_per_cell Maximum number of points in the point cloud that are allowed to fall within any of the grid map cells. If there is more points, the value will be set to NaN. This number can be used to ignore cells with a lot of points which speeds up the processing (but results with some holes in the map).
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengths are computed automatically.
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/use_max_height_as_cell_elevation Use the maximum cluster to extract the cell height. If false (default), the lowest cluster is taken.
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
1.7.0 (2022-03-17)
1.6.4 (2020-12-04)
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rviz | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| pcl_ros | |
| roscpp |
System Dependencies
| Name |
|---|
| gtest |
| libpcl-all-dev |
| yaml-cpp |
Dependant Packages
Launch files
- launch/grid_map_pcl_loader_node.launch
-
- folder_path [default: $(find grid_map_pcl)/data]
- pcd_filename [default: input_cloud.pcd]
- configFilePath_ [default: $(find grid_map_pcl)/config/parameters.yaml]
- map_rosbag_topic [default: grid_map]
- output_grid_map [default: $(find grid_map_pcl)/data/input_cloud.bag]
- map_frame [default: map]
- map_layer_name [default: elevation]
- prefix [default: ]
- set_verbosity_to_debug [default: false]
- publish_point_cloud [default: true]
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 1.7.10 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ethz-asl/grid_map.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-11-17 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest or highest cluster (min/max z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Publications
The code for point cloud to grid map conversion has been developed as a part of research on autonomous precision harvesting. If you are using the point cloud to grid map conversion, please add the following citation to your publication:
Jelavic, E., Jud, D., Egli, P. and Hutter, M., 2021. Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester.
@article{jelavic2021towards,
title={Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester},
author={Jelavic, Edo and Jud, Dominic and Egli, Pascal and Hutter, Marco},
journal={Field Robotics},
year={2021},
publisher={Wiley}
}
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
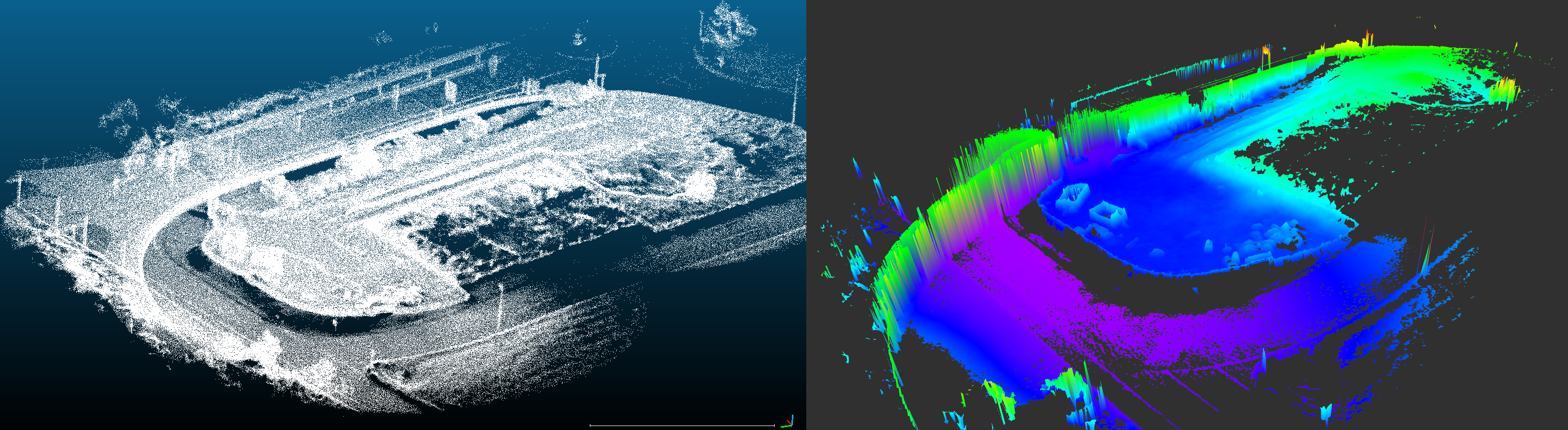
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place your
.pcdfile in the package folder or anywhere on the system (e.g./.../grid_map_pcl/data/example.pcd). - Modify the
pcd_filenameinside the launch file such that it points to the.pcdfile you would like to process (e.g./.../grid_map_pcl/data/example.pcd). Set theoutput_grid_mapvariable to point to the location where you wish to save the resulting grid map (e.g./.../grid_map_pcl/data/example_grid_map.bag) - Change the
configFilePath_variable in the launch file to point to the.yamlfile with configuration parameters (e.g./.../grid_map_pcl/config/parameters.yaml) - You can run the algorithm with:
roslaunch grid_map_pcl grid_map_pcl_loader_node.launch - Once the algorithm is done you will see the output in the console, and it should visualize the point cloud and the grid map in rviz. If that does not happen, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where
grid_map_pcl_loader_nodeis running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in to the location pointed by output_grid_map variable in the launch file. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/max_num_points_per_cell Maximum number of points in the point cloud that are allowed to fall within any of the grid map cells. If there is more points, the value will be set to NaN. This number can be used to ignore cells with a lot of points which speeds up the processing (but results with some holes in the map).
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengths are computed automatically.
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/use_max_height_as_cell_elevation Use the maximum cluster to extract the cell height. If false (default), the lowest cluster is taken.
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
1.7.0 (2022-03-17)
1.6.4 (2020-12-04)
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rviz | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| pcl_ros | |
| roscpp |
System Dependencies
| Name |
|---|
| gtest |
| libpcl-all-dev |
| yaml-cpp |
Dependant Packages
Launch files
- launch/grid_map_pcl_loader_node.launch
-
- folder_path [default: $(find grid_map_pcl)/data]
- pcd_filename [default: input_cloud.pcd]
- configFilePath_ [default: $(find grid_map_pcl)/config/parameters.yaml]
- map_rosbag_topic [default: grid_map]
- output_grid_map [default: $(find grid_map_pcl)/data/input_cloud.bag]
- map_frame [default: map]
- map_layer_name [default: elevation]
- prefix [default: ]
- set_verbosity_to_debug [default: false]
- publish_point_cloud [default: true]
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 1.7.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/anybotics/grid_map.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-13 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Guoxiang Zhou
- Mathieu Agostinucci
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest or highest cluster (min/max z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Publications
The code for point cloud to grid map conversion has been developed as a part of research on autonomous precision harvesting. If you are using the point cloud to grid map conversion, please add the following citation to your publication:
Jelavic, E., Jud, D., Egli, P. and Hutter, M., 2021. Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester.
@article{jelavic2021towards,
title={Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester},
author={Jelavic, Edo and Jud, Dominic and Egli, Pascal and Hutter, Marco},
journal={Field Robotics},
year={2021},
publisher={Wiley}
}
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place your
.pcdfile in the package folder or anywhere on the system (e.g./.../grid_map_pcl/data/example.pcd). - Modify the
pcd_filenameinside the launch file such that it points to the.pcdfile you would like to process (e.g./.../grid_map_pcl/data/example.pcd). Set theoutput_grid_mapvariable to point to the location where you wish to save the resulting grid map (e.g./.../grid_map_pcl/data/example_grid_map.bag) - Change the
configFilePath_variable in the launch file to point to the.yamlfile with configuration parameters (e.g./.../grid_map_pcl/config/parameters.yaml) - You can run the algorithm with:
roslaunch grid_map_pcl grid_map_pcl_loader_node.launch - Once the algorithm is done you will see the output in the console, and it should visualize the point cloud and the grid map in rviz. If that does not happen, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where
grid_map_pcl_loader_nodeis running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in to the location pointed by output_grid_map variable in the launch file. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/max_num_points_per_cell Maximum number of points in the point cloud that are allowed to fall within any of the grid map cells. If there is more points, the value will be set to NaN. This number can be used to ignore cells with a lot of points which speeds up the processing (but results with some holes in the map).
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengths are computed automatically.
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/use_max_height_as_cell_elevation Use the maximum cluster to extract the cell height. If false (default), the lowest cluster is taken.
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
1.7.0 (2022-03-17)
1.6.4 (2020-12-04)
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rviz | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| pcl_ros | |
| roscpp |
System Dependencies
| Name |
|---|
| gtest |
| libpcl-all-dev |
| yaml-cpp |
Dependant Packages
Launch files
- launch/grid_map_pcl_loader_node.launch
-
- folder_path [default: $(find grid_map_pcl)/data]
- pcd_filename [default: input_cloud.pcd]
- configFilePath_ [default: $(find grid_map_pcl)/config/parameters.yaml]
- map_rosbag_topic [default: grid_map]
- output_grid_map [default: $(find grid_map_pcl)/data/input_cloud.bag]
- map_frame [default: map]
- map_layer_name [default: elevation]
- prefix [default: ]
- set_verbosity_to_debug [default: false]
- publish_point_cloud [default: true]
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_cmake_helpers grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 2.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ANYbotics/grid_map.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Maximilian Wulf
- Yoshua Nava
- Ryan Friedman
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest cluster (min z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place .pcd files in the package folder or anywhere on the system (e.g. grid_map_pcl/data/example.pcd).
- Modify the folder_path inside the launch file such that the folder file points to the folder containing .pcd files (e.g. /“path to the grid_map_pcl folder”/data).
- Change the pcd_filename to the point cloud file that you want to process
- You can run the algorithm with: roslaunch grid_map_pcl grid_map_pcl_loader_node.launch
- Once the algorithm is done you will see the output in the console, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where grid_map_pcl_loader_node is running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in the folder given by folder_path variable in the launch file and will be named with a string contained inside the output_grid_map variable. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengts are computed automatically.
- pcl_grid_map_extraction/grid_map/height_type How to calculate elevation value. 0: Smallest value among the average values of each cluster 1: Mean value of the cluster with the most points
- pcl_grid_map_extraction/grid_map/height_thresh Height range from the smallest cluster.(Only for height_type 1)
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
unreleased (2021-06-24) ------------------* Replaced pcl_ros dependency with PCL * Contributors: Matthew Young (Trimble Inc)
2.0.1 (2025-01-18)
- Merge pull request #445 from ANYbotics/mergify/bp/humble/pr-443 Add Ryan as maintainer, remove Steve (backport #443)
- Add Ryan as maintainer, remove Steve (cherry picked from commit 852f67694637612e624e4c683a01ab589408b8e7)
- Merge pull request #437 from ANYbotics/mergify/bp/humble/pr-423 Split PCL deps for dev and runtime (backport #423)
- Split PCL deps to dev and runtime (cherry picked from commit 220def8b3a3f941b3f2f4f5280012326a89007ed)
- Contributors: Ryan, Ryan Friedman
2.0.0 (2022-09-13)
- ci: fix tests in grid map pcl
- fix: mark Eigen library as SYSTEM
- fix: build error on jammy
- Add height of cluster with the most points method
- Initial ROS2 port
- Contributors: Maximilian Wulf, Steve Macenski
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| grid_map_cmake_helpers | |
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| rclcpp | |
| rcutils |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| grid_map |
Launch files
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 1.7.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/anybotics/grid_map.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-13 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Guoxiang Zhou
- Mathieu Agostinucci
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest or highest cluster (min/max z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Publications
The code for point cloud to grid map conversion has been developed as a part of research on autonomous precision harvesting. If you are using the point cloud to grid map conversion, please add the following citation to your publication:
Jelavic, E., Jud, D., Egli, P. and Hutter, M., 2021. Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester.
@article{jelavic2021towards,
title={Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester},
author={Jelavic, Edo and Jud, Dominic and Egli, Pascal and Hutter, Marco},
journal={Field Robotics},
year={2021},
publisher={Wiley}
}
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place your
.pcdfile in the package folder or anywhere on the system (e.g./.../grid_map_pcl/data/example.pcd). - Modify the
pcd_filenameinside the launch file such that it points to the.pcdfile you would like to process (e.g./.../grid_map_pcl/data/example.pcd). Set theoutput_grid_mapvariable to point to the location where you wish to save the resulting grid map (e.g./.../grid_map_pcl/data/example_grid_map.bag) - Change the
configFilePath_variable in the launch file to point to the.yamlfile with configuration parameters (e.g./.../grid_map_pcl/config/parameters.yaml) - You can run the algorithm with:
roslaunch grid_map_pcl grid_map_pcl_loader_node.launch - Once the algorithm is done you will see the output in the console, and it should visualize the point cloud and the grid map in rviz. If that does not happen, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where
grid_map_pcl_loader_nodeis running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in to the location pointed by output_grid_map variable in the launch file. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/max_num_points_per_cell Maximum number of points in the point cloud that are allowed to fall within any of the grid map cells. If there is more points, the value will be set to NaN. This number can be used to ignore cells with a lot of points which speeds up the processing (but results with some holes in the map).
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengths are computed automatically.
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/use_max_height_as_cell_elevation Use the maximum cluster to extract the cell height. If false (default), the lowest cluster is taken.
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
1.7.0 (2022-03-17)
1.6.4 (2020-12-04)
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rviz | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| pcl_ros | |
| roscpp |
System Dependencies
| Name |
|---|
| gtest |
| libpcl-all-dev |
| yaml-cpp |
Dependant Packages
Launch files
- launch/grid_map_pcl_loader_node.launch
-
- folder_path [default: $(find grid_map_pcl)/data]
- pcd_filename [default: input_cloud.pcd]
- configFilePath_ [default: $(find grid_map_pcl)/config/parameters.yaml]
- map_rosbag_topic [default: grid_map]
- output_grid_map [default: $(find grid_map_pcl)/data/input_cloud.bag]
- map_frame [default: map]
- map_layer_name [default: elevation]
- prefix [default: ]
- set_verbosity_to_debug [default: false]
- publish_point_cloud [default: true]
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 1.7.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/anybotics/grid_map.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-13 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Guoxiang Zhou
- Mathieu Agostinucci
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest or highest cluster (min/max z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Publications
The code for point cloud to grid map conversion has been developed as a part of research on autonomous precision harvesting. If you are using the point cloud to grid map conversion, please add the following citation to your publication:
Jelavic, E., Jud, D., Egli, P. and Hutter, M., 2021. Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester.
@article{jelavic2021towards,
title={Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester},
author={Jelavic, Edo and Jud, Dominic and Egli, Pascal and Hutter, Marco},
journal={Field Robotics},
year={2021},
publisher={Wiley}
}
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place your
.pcdfile in the package folder or anywhere on the system (e.g./.../grid_map_pcl/data/example.pcd). - Modify the
pcd_filenameinside the launch file such that it points to the.pcdfile you would like to process (e.g./.../grid_map_pcl/data/example.pcd). Set theoutput_grid_mapvariable to point to the location where you wish to save the resulting grid map (e.g./.../grid_map_pcl/data/example_grid_map.bag) - Change the
configFilePath_variable in the launch file to point to the.yamlfile with configuration parameters (e.g./.../grid_map_pcl/config/parameters.yaml) - You can run the algorithm with:
roslaunch grid_map_pcl grid_map_pcl_loader_node.launch - Once the algorithm is done you will see the output in the console, and it should visualize the point cloud and the grid map in rviz. If that does not happen, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where
grid_map_pcl_loader_nodeis running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in to the location pointed by output_grid_map variable in the launch file. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/max_num_points_per_cell Maximum number of points in the point cloud that are allowed to fall within any of the grid map cells. If there is more points, the value will be set to NaN. This number can be used to ignore cells with a lot of points which speeds up the processing (but results with some holes in the map).
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengths are computed automatically.
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/use_max_height_as_cell_elevation Use the maximum cluster to extract the cell height. If false (default), the lowest cluster is taken.
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
1.7.0 (2022-03-17)
1.6.4 (2020-12-04)
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rviz | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| pcl_ros | |
| roscpp |
System Dependencies
| Name |
|---|
| gtest |
| libpcl-all-dev |
| yaml-cpp |
Dependant Packages
Launch files
- launch/grid_map_pcl_loader_node.launch
-
- folder_path [default: $(find grid_map_pcl)/data]
- pcd_filename [default: input_cloud.pcd]
- configFilePath_ [default: $(find grid_map_pcl)/config/parameters.yaml]
- map_rosbag_topic [default: grid_map]
- output_grid_map [default: $(find grid_map_pcl)/data/input_cloud.bag]
- map_frame [default: map]
- map_layer_name [default: elevation]
- prefix [default: ]
- set_verbosity_to_debug [default: false]
- publish_point_cloud [default: true]
Messages
Services
Plugins
Recent questions tagged grid_map_pcl at Robotics Stack Exchange
|
|
grid_map_pcl package from grid_map repogrid_map grid_map_core grid_map_costmap_2d grid_map_cv grid_map_demos grid_map_filters grid_map_loader grid_map_msgs grid_map_octomap grid_map_pcl grid_map_ros grid_map_rviz_plugin grid_map_sdf grid_map_visualization |
ROS Distro
|
Package Summary
| Version | 1.7.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/anybotics/grid_map.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-01-13 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Guoxiang Zhou
- Mathieu Agostinucci
Authors
- Dominic Jud
- Edo Jelavic
Grid Map Pcl
Overview
This is a C++ package integrated with ROS for computing 2.5D elevation maps from pcl types. Currently, supported types are point clouds and meshes.
Converting a mesh to a grid map
The elevation is computed by raytracing lines coming from the grid map cells and computing their intersection with the mesh.
Converting a raw pointcloud to a grid map
The elevation is computed by slicing the point cloud in the x-y plane into columns. Column location and size correspond to the location and size of grid map cells in the point cloud coordinate frame. Subsequently, the clustering of points inside each column is performed and the elevation of the lowest or highest cluster (min/max z coordinate) is assumed to be the terrain elevation. The elevation of the cluster is computed as a mean of all positions from the points that belong to a cluster. All calculations are performed in the pointcloud frame.
Authors: Edo Jelavic, Dominic Jud
Affiliation: ETH Zurich, Robotics Systems Lab
Publications
The code for point cloud to grid map conversion has been developed as a part of research on autonomous precision harvesting. If you are using the point cloud to grid map conversion, please add the following citation to your publication:
Jelavic, E., Jud, D., Egli, P. and Hutter, M., 2021. Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester.
@article{jelavic2021towards,
title={Towards Autonomous Robotic Precision Harvesting: Mapping, Localization, Planning and Control for a Legged Tree Harvester},
author={Jelavic, Edo and Jud, Dominic and Egli, Pascal and Hutter, Marco},
journal={Field Robotics},
year={2021},
publisher={Wiley}
}
Examples
Examples of elevation maps computed from point clouds using this package:
Outdoor dataset example
Forest dataset example
Indoor dataset example
Usage
The algorithm will open the .pcd file, convert the point cloud to a grid map and save the grid map as a rosbag into the folder specified by the user.
- Place your
.pcdfile in the package folder or anywhere on the system (e.g./.../grid_map_pcl/data/example.pcd). - Modify the
pcd_filenameinside the launch file such that it points to the.pcdfile you would like to process (e.g./.../grid_map_pcl/data/example.pcd). Set theoutput_grid_mapvariable to point to the location where you wish to save the resulting grid map (e.g./.../grid_map_pcl/data/example_grid_map.bag) - Change the
configFilePath_variable in the launch file to point to the.yamlfile with configuration parameters (e.g./.../grid_map_pcl/config/parameters.yaml) - You can run the algorithm with:
roslaunch grid_map_pcl grid_map_pcl_loader_node.launch - Once the algorithm is done you will see the output in the console, and it should visualize the point cloud and the grid map in rviz. If that does not happen, then you can run rviz in a separate terminal (make sure that you have sourced your workspace, DO NOT CLOSE the terminal where
grid_map_pcl_loader_nodeis running ) and visualize the resulting grid map. Instructions on how to visualize a grid map are in the grid map README.
The resulting grid map will be saved in to the location pointed by output_grid_map variable in the launch file. For large point clouds (100M-140M points) the algorithm takes about 30-60 min to finish (with 6 threads). For sizes that are in the range of 40M to 60M points, the runtime varies between 5 and 15 min, depending on the number of points. Point cloud with around 10M points or less can be processed in a minute or two.
Parameters
Algorithm Parameters (conversion from raw point clouds)
General parameters
- pcl_grid_map_extraction/num_processing_threads Number of threads for processing grid map cells. Filtering of the raw input point cloud is not parallelized.
Grid map parameters
Resulting grid map parameters.
- pcl_grid_map_extraction/grid_map/min_num_points_per_cell Minimum number of points in the point cloud that have to fall within any of the grid map cells. Otherwise the cell elevation will be set to NaN.
- pcl_grid_map_extraction/grid_map/max_num_points_per_cell Maximum number of points in the point cloud that are allowed to fall within any of the grid map cells. If there is more points, the value will be set to NaN. This number can be used to ignore cells with a lot of points which speeds up the processing (but results with some holes in the map).
- pcl_grid_map_extraction/grid_map/resolution Resolution of the grid map. Width and lengths are computed automatically.
Point Cloud Pre-processing Parameters
Rigid body transform parameters
Rigid body transorm that is applied to the point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/translation Translation (xyz) that is applied to the input point cloud before computing elevation.
- pcl_grid_map_extraction/cloud_transform/rotation Rotation (intrinsic rotation, convention X-Y’-Z’’) that is applied to the input point cloud before computing elevation.
Cluster extraction parameters
Cluster extraction is based on pcl algorithms. See: http://pointclouds.org/documentation/tutorials/cluster_extraction.php for more details.
- pcl_grid_map_extraction/cluster_extraction/cluster_tolerance Distance between points below which they will still be considered part of one cluster.
- pcl_grid_map_extraction/cluster_extraction/min_num_points Min number of points that a cluster needs to have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/max_num_points Max number of points that a cluster can have (otherwise it will be discarded).
- pcl_grid_map_extraction/cluster_extraction/use_max_height_as_cell_elevation Use the maximum cluster to extract the cell height. If false (default), the lowest cluster is taken.
Outlier removal parameters
See http://pointclouds.org/documentation/tutorials/statistical_outlier.php for more explanation on outlier removal.
- pcl_grid_map_extraction/outlier_removal/is_remove_outliers* Whether to perform statisctical outlier removal.
- pcl_grid_map_extraction/outlier_removal/mean_K* Number of neighbours to analyze for estimating statistics of a point.
- pcl_grid_map_extraction/outlier_removal/stddev_threshold* Number of standard deviations under which points are considered to be inliers.
Subsampling parameters
See http://pointclouds.org/documentation/tutorials/voxel_grid.php for more explanation on point cloud downsampling
- pcl_grid_map_extraction/downsampling/is_downsample_cloud Whether to perform downsampling or not.
- pcl_grid_map_extraction/downsampling/voxel_size Voxel sizes (xyz) in meters.
Changelog for package grid_map_pcl
1.7.0 (2022-03-17)
1.6.4 (2020-12-04)
1.6.2 (2019-10-14)
1.6.1 (2019-02-27)
- Updated host changes.
- Updated author e-mail address.
- Contributors: Peter Fankhauser, Péter Fankhauser
1.6.0 (2017-11-24)
1.5.2 (2017-07-25)
1.5.1 (2017-07-25)
1.5.0 (2017-07-18)
- Improved efficiency of mesh conversion.
- Contributors: Alex Millane
1.4.2 (2017-01-24)
- Addressing C++ compiler warnings.
- Contributors: Peter Fankhauser
1.4.1 (2016-10-23)
- Added new grid_map_pcl package to convert from PCL mesh to grid map.
- Contributors: Dominic Jud
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| rviz | |
| grid_map_core | |
| grid_map_msgs | |
| grid_map_ros | |
| pcl_ros | |
| roscpp |
System Dependencies
| Name |
|---|
| gtest |
| libpcl-all-dev |
| yaml-cpp |
Dependant Packages
Launch files
- launch/grid_map_pcl_loader_node.launch
-
- folder_path [default: $(find grid_map_pcl)/data]
- pcd_filename [default: input_cloud.pcd]
- configFilePath_ [default: $(find grid_map_pcl)/config/parameters.yaml]
- map_rosbag_topic [default: grid_map]
- output_grid_map [default: $(find grid_map_pcl)/data/input_cloud.bag]
- map_frame [default: map]
- map_layer_name [default: elevation]
- prefix [default: ]
- set_verbosity_to_debug [default: false]
- publish_point_cloud [default: true]