
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
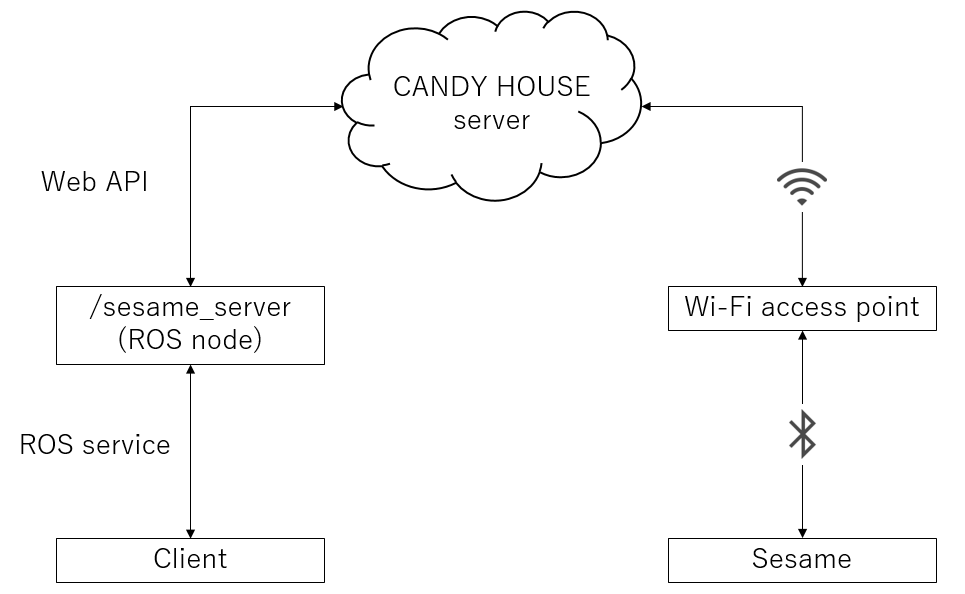
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |
Launch files
Messages
Services
Plugins
Recent questions tagged sesame_ros at Robotics Stack Exchange
Package Summary
| Version | 2.1.31 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_3rdparty.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Kei Okada
- Yuto Uchimi
Authors
- Yuto Uchimi
sesame_ros
ROS API for Sesame smart lock made by CANDY HOUSE, Inc.
API key
You have to create your authorization token by logging into the CANDY HOUSE Dashboard: https://my.candyhouse.co/
Note that you must be the owner of your Sesame in order to use Web API.
Please make sure you can see the list of Sesames on CANDY HOUSE Dashboard.
Python Package Requirements
This package supports catkin_virtualenv.
So pip dependencies written in requirements.txt will be automatically installed into virtualenv during build.
Scripts in this package
-
list_sesames.py
A script for listing your Sesames.
Arguments
-
auth_token(required): Your authorization token. Path to its file is also supported.
-
-
sesame_server.py
A node for controlling your Sesame.
Parameters
-
~auth_token(string, required): Your authorization token. Path to its file is also supported. -
~device_id(string, optional): UUID of your Sesame. -
~nickname(string, optional): Nickname of your Sesame.
~device_idand~nicknameare used for searching Sesame from your Sesame list.If neither of them matches or is specified, the first found Sesame will be used.
-
~command_timeout(intorfloat, optional): Timeout for executing commands. Default is 60 [sec].
Advertising services (See Usage section)
-
~get_status(sesame_ros/Status) -
~lock(sesame_ros/Command) -
~unlock(sesame_ros/Command) -
~force_sync(sesame_ros/Command)
-
Defined service list
- sesame_ros/Status
---
string nickname
string serial
string device_id
int32 battery
bool locked
bool responsive
- sesame_ros/Command
---
string status
bool successful
string error
Usage
To list your Sesames:
Just run below.
$ rosrun sesame_ros list_sesames.py YOUR_AUTH_TOKEN
To controll your Sesame:
- Start service server.
File truncated at 100 lines see the full file
Changelog for package sesame_ros
2.1.31 (2025-05-13)
2.1.30 (2025-05-10)
- CI: add ROS-O testing on arm
(#528),
fix sesame_ros on arm64
- CI: add ROS-O testing on arm
- CI: use ros-one-catkin-virtualenv
- sesami_ros: add requirements.in.python3.12, for arm64 22.04/24.04
- Contributors: Kei Okada, Yoshiki Obinata
2.1.29 (2025-01-05)
- Support ros-o / Ubuntu 22.04
(#512)
- [sesame_ros] relax venv check
- [sesame_ros] remove cffi which cannot be installed in Ubuntu 22.04 env & not used in sesame_ros
- Contributors: Yoshiki Obinata
2.1.28 (2023-07-24)
2.1.27 (2023-06-24)
- fix package.xml/CMakeLists.txt to supress catkin_lint errors (#479)
- Contributors: Kei Okada
2.1.26 (2023-06-14)
- add LICENSE files (#476)
- Contributors: Kei Okada
2.1.25 (2023-06-08)
- add test to check if ros node is loadable (#463)
- Explicit python interpreter in catkin_virtualenv (#367)
- Contributors: Kei Okada, Shingo Kitagawa, Yoshiki Obinata
2.1.24 (2021-07-26)
2.1.23 (2021-07-21)
2.1.22 (2021-06-10)
2.1.21 (2020-08-19)
2.1.20 (2020-08-07)
2.1.19 (2020-07-21)
2.1.18 (2020-07-20)
- Fix for noetic
(#200)
- update sesame_ros/requirements.txt to pass https://github.com/locusrobotics/catkin_virtualenv/blob/master/README.md#locking-dependencies
- Contributors: Kei Okada
2.1.17 (2020-04-16)
-
update pip modules for security reason (#196)
-
add idna==2.7 to cloes ERROR: requests 2.20.0 has requirement idna<2.8,>=2.5, but you'll have idna 2.9 which is incompatible.
-
Bump urllib3 from 1.22 to 1.24.2 in /sesame_ros Bumps [urllib3](https://github.com/urllib3/urllib3) from 1.22 to 1.24.2.
- [Release notes](https://github.com/urllib3/urllib3/releases)
- [Changelog](https://github.com/urllib3/urllib3/blob/master/CHANGES.rst)
- [Commits](https://github.com/urllib3/urllib3/compare/1.22...1.24.2) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump requests from 2.19.1 to 2.20.0 in /sesame_ros Bumps [requests](https://github.com/psf/requests) from 2.19.1 to 2.20.0.
- [Release notes](https://github.com/psf/requests/releases)
- [Changelog](https://github.com/psf/requests/blob/master/HISTORY.md)
- [Commits](https://github.com/psf/requests/compare/v2.19.1...v2.20.0) Signed-off-by: dependabot[bot] <<support@github.com>>
-
Bump pyopenssl from 16.2.0 to 17.5.0 in /sesame_ros Bumps [pyopenssl](https://github.com/pyca/pyopenssl) from 16.2.0 to 17.5.0.
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| jsk_3rdparty |