
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.4 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Wang DeYou
Authors
- Slamtec ROS Maintainer
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
Forthcoming
- Update README
- Add launch file for rplidar C1
- Update SDK.
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- RPLIDAR C1 support
- Contributors: deyou wang
2.1.4 (2023-08-15)
- Update SDK.
- UltraDense protocol support
- support for stoppping A1 motor
- Optimize lidar driver for switching S2E workingmode
- Bugfix:logical error
- Install udev rules via debian.
- Contributors: Tony Baltovski, deyou wang
2.1.3 (2023-07-20)
- Bugfix:auto standby mode not work
- Rename SLLidar* to RPLidar* in rplidar_node.cpp
- Renaming variable m_running to is_scanning
- Update README
- Use rplidar_ros.rviz instead of rplidar.rviz
- Update source files in src directory: Use the source files developed by Slamtec instead of the old ones, and add the functionality of the old code.
- Modify and add launch files
- Update rplidar-sdk to 2.0.0
- Update create_udev_rules.sh
- Update description in package.xml
- Update maintainer to Wang DeYou
- Contributors: Wang DeYou
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.4 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Wang DeYou
Authors
- Slamtec ROS Maintainer
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
Forthcoming
- Update README
- Add launch file for rplidar C1
- Update SDK.
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- RPLIDAR C1 support
- Contributors: deyou wang
2.1.4 (2023-08-15)
- Update SDK.
- UltraDense protocol support
- support for stoppping A1 motor
- Optimize lidar driver for switching S2E workingmode
- Bugfix:logical error
- Install udev rules via debian.
- Contributors: Tony Baltovski, deyou wang
2.1.3 (2023-07-20)
- Bugfix:auto standby mode not work
- Rename SLLidar* to RPLidar* in rplidar_node.cpp
- Renaming variable m_running to is_scanning
- Update README
- Use rplidar_ros.rviz instead of rplidar.rviz
- Update source files in src directory: Use the source files developed by Slamtec instead of the old ones, and add the functionality of the old code.
- Modify and add launch files
- Update rplidar-sdk to 2.0.0
- Update create_udev_rules.sh
- Update description in package.xml
- Update maintainer to Wang DeYou
- Contributors: Wang DeYou
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
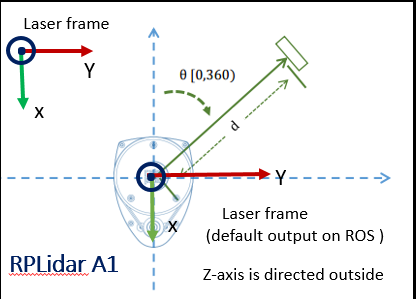
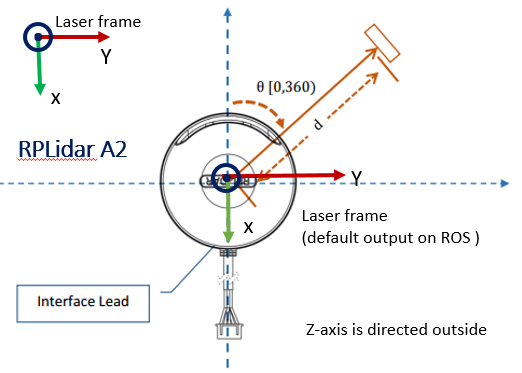
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
-
Fix compilation with eloquent (#6)
-
Use Composition node with launch files (#4)
-
Composable nodes (#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
-
Fix compilation with eloquent (#6)
-
Use Composition node with launch files (#4)
-
Composable nodes (#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
-
Fix compilation with eloquent (#6)
-
Use Composition node with launch files (#4)
-
Composable nodes (#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.4 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Wang DeYou
Authors
- Slamtec ROS Maintainer
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
Forthcoming
- Update README
- Add launch file for rplidar C1
- Update SDK.
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- RPLIDAR C1 support
- Contributors: deyou wang
2.1.4 (2023-08-15)
- Update SDK.
- UltraDense protocol support
- support for stoppping A1 motor
- Optimize lidar driver for switching S2E workingmode
- Bugfix:logical error
- Install udev rules via debian.
- Contributors: Tony Baltovski, deyou wang
2.1.3 (2023-07-20)
- Bugfix:auto standby mode not work
- Rename SLLidar* to RPLidar* in rplidar_node.cpp
- Renaming variable m_running to is_scanning
- Update README
- Use rplidar_ros.rviz instead of rplidar.rviz
- Update source files in src directory: Use the source files developed by Slamtec instead of the old ones, and add the functionality of the old code.
- Modify and add launch files
- Update rplidar-sdk to 2.0.0
- Update create_udev_rules.sh
- Update description in package.xml
- Update maintainer to Wang DeYou
- Contributors: Wang DeYou
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.4 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Wang DeYou
Authors
- Slamtec ROS Maintainer
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
Forthcoming
- Update README
- Add launch file for rplidar C1
- Update SDK.
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- RPLIDAR C1 support
- Contributors: deyou wang
2.1.4 (2023-08-15)
- Update SDK.
- UltraDense protocol support
- support for stoppping A1 motor
- Optimize lidar driver for switching S2E workingmode
- Bugfix:logical error
- Install udev rules via debian.
- Contributors: Tony Baltovski, deyou wang
2.1.3 (2023-07-20)
- Bugfix:auto standby mode not work
- Rename SLLidar* to RPLidar* in rplidar_node.cpp
- Renaming variable m_running to is_scanning
- Update README
- Use rplidar_ros.rviz instead of rplidar.rviz
- Update source files in src directory: Use the source files developed by Slamtec instead of the old ones, and add the functionality of the old code.
- Modify and add launch files
- Update rplidar-sdk to 2.0.0
- Update create_udev_rules.sh
- Update description in package.xml
- Update maintainer to Wang DeYou
- Contributors: Wang DeYou
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.4 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Wang DeYou
Authors
- Slamtec ROS Maintainer
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
Forthcoming
- Update README
- Add launch file for rplidar C1
- Update SDK.
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- RPLIDAR C1 support
- Contributors: deyou wang
2.1.4 (2023-08-15)
- Update SDK.
- UltraDense protocol support
- support for stoppping A1 motor
- Optimize lidar driver for switching S2E workingmode
- Bugfix:logical error
- Install udev rules via debian.
- Contributors: Tony Baltovski, deyou wang
2.1.3 (2023-07-20)
- Bugfix:auto standby mode not work
- Rename SLLidar* to RPLidar* in rplidar_node.cpp
- Renaming variable m_running to is_scanning
- Update README
- Use rplidar_ros.rviz instead of rplidar.rviz
- Update source files in src directory: Use the source files developed by Slamtec instead of the old ones, and add the functionality of the old code.
- Modify and add launch files
- Update rplidar-sdk to 2.0.0
- Update create_udev_rules.sh
- Update description in package.xml
- Update maintainer to Wang DeYou
- Contributors: Wang DeYou
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.4 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Wang DeYou
Authors
- Slamtec ROS Maintainer
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
Forthcoming
- Update README
- Add launch file for rplidar C1
- Update SDK.
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- RPLIDAR C1 support
- Contributors: deyou wang
2.1.4 (2023-08-15)
- Update SDK.
- UltraDense protocol support
- support for stoppping A1 motor
- Optimize lidar driver for switching S2E workingmode
- Bugfix:logical error
- Install udev rules via debian.
- Contributors: Tony Baltovski, deyou wang
2.1.3 (2023-07-20)
- Bugfix:auto standby mode not work
- Rename SLLidar* to RPLidar* in rplidar_node.cpp
- Renaming variable m_running to is_scanning
- Update README
- Use rplidar_ros.rviz instead of rplidar.rviz
- Update source files in src directory: Use the source files developed by Slamtec instead of the old ones, and add the functionality of the old code.
- Modify and add launch files
- Update rplidar-sdk to 2.0.0
- Update create_udev_rules.sh
- Update description in package.xml
- Update maintainer to Wang DeYou
- Contributors: Wang DeYou
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.4 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Wang DeYou
Authors
- Slamtec ROS Maintainer
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
Forthcoming
- Update README
- Add launch file for rplidar C1
- Update SDK.
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- RPLIDAR C1 support
- Contributors: deyou wang
2.1.4 (2023-08-15)
- Update SDK.
- UltraDense protocol support
- support for stoppping A1 motor
- Optimize lidar driver for switching S2E workingmode
- Bugfix:logical error
- Install udev rules via debian.
- Contributors: Tony Baltovski, deyou wang
2.1.3 (2023-07-20)
- Bugfix:auto standby mode not work
- Rename SLLidar* to RPLidar* in rplidar_node.cpp
- Renaming variable m_running to is_scanning
- Update README
- Use rplidar_ros.rviz instead of rplidar.rviz
- Update source files in src directory: Use the source files developed by Slamtec instead of the old ones, and add the functionality of the old code.
- Modify and add launch files
- Update rplidar-sdk to 2.0.0
- Update create_udev_rules.sh
- Update description in package.xml
- Update maintainer to Wang DeYou
- Contributors: Wang DeYou
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
-
Fix compilation with eloquent (#6)
-
Use Composition node with launch files (#4)
-
Composable nodes (#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| turtlebot4_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
-
Fix compilation with eloquent (#6)
-
Use Composition node with launch files (#4)
-
Composable nodes (#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_navigation | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
-
Update SDK to Version 0.12.0 (#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
-
Update ROS 2 parameters and use node's clock instance (#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
-
Fix compilation with eloquent (#6)
-
Use Composition node with launch files (#4)
-
Composable nodes (#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.5 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Slamtec ROS Maintainer
Authors
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
2.1.5 (2023-11-20)
- Update RPLIDAR SDK to 2.1.0
- Support RPLIDAR C1 (#142)
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- UltraDense protocol support
- support for stoppping A1 motor
- bugfix:start/stop_motor(service) cause lidar to stop scanning
- Fix build with C++14 && --march=native
- scan frequency configuration support
- Add launch file for RPLIDAR a2m*,C1
- Install udev rules via debian. (#126)
- Bugfix:create_udev_rules.sh dose not take effect immediately.
- When node starts to reset rplidar, if rplidar info is not obtained within 15 seconds, rplidar reset fails
- Add initial_reset option to reset rplidar on node start
- Compilation optimization
- Contributors: Babak-SSh, Tim Clephas, Tony Baltovski, Ubuntu248, Victor Belov, Wang DeYou, WubinXia, kint, yzx
2.0.0 (2021-10-8)
- Update RPLIDAR SDK to 2.0.0
- [new feature] 1.redesign the skelton of the sdk. 2.support Rplidar S2
- Contributors: tony,WubinXia
1.10.0 (2019-02-22)
- Update RPLIDAR SDK to 1.10.0
- [new feature] support Rplidar S1
- Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rosconsole | |
| sensor_msgs | |
| std_srvs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/rplidar_a1.launch
- launch/rplidar_a2m12.launch
- launch/rplidar_a2m7.launch
- launch/rplidar_a2m8.launch
- launch/rplidar_a3.launch
- launch/rplidar_c1.launch
- launch/rplidar_s1.launch
- launch/rplidar_s1_tcp.launch
- launch/rplidar_s2.launch
- launch/rplidar_s2e.launch
- launch/rplidar_s3.launch
- launch/rplidar_t1.launch
- launch/test_rplidar.launch
- launch/test_rplidar_a3.launch
- launch/view_rplidar_a1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m12.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m7.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m8.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_c1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1_tcp.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2e.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_t1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 1.9.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/robopeak/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-08-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Slamtec ROS Maintainer
Authors
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin's workspace src folder
2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
roslaunch rplidar_ros view_rplidar.launch (for RPLIDAR A1/A2) or roslaunch rplidar_ros view_rplidar_a3.launch (for RPLIDAR A3)
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
roslaunch rplidar_ros rplidar.launch (for RPLIDAR A1/A2) or roslaunch rplidar_ros rplidar_a3.launch (for RPLIDAR A3)
rosrun rplidar_ros rplidarNodeClient
You should see rplidar’s scan result in the console
Notice: the different is serial_baudrate between A1/A2 and A3
RPLidar frame
RPLidar frame must be broadcasted according to picture shown in rplidar-frame.png
Changelog for package rplidar_ros
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
- Contributors: Ling, RoboPeak Public Repos
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rosconsole | |
| sensor_msgs | |
| std_srvs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/rplidar.launch
- launch/rplidar_a3.launch
- launch/test_rplidar.launch
- launch/test_rplidar_a3.launch
- launch/view_rplidar.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.5 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Slamtec ROS Maintainer
Authors
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
2.1.5 (2023-11-20)
- Update RPLIDAR SDK to 2.1.0
- Support RPLIDAR C1 (#142)
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- UltraDense protocol support
- support for stoppping A1 motor
- bugfix:start/stop_motor(service) cause lidar to stop scanning
- Fix build with C++14 && --march=native
- scan frequency configuration support
- Add launch file for RPLIDAR a2m*,C1
- Install udev rules via debian. (#126)
- Bugfix:create_udev_rules.sh dose not take effect immediately.
- When node starts to reset rplidar, if rplidar info is not obtained within 15 seconds, rplidar reset fails
- Add initial_reset option to reset rplidar on node start
- Compilation optimization
- Contributors: Babak-SSh, Tim Clephas, Tony Baltovski, Ubuntu248, Victor Belov, Wang DeYou, WubinXia, kint, yzx
2.0.0 (2021-10-8)
- Update RPLIDAR SDK to 2.0.0
- [new feature] 1.redesign the skelton of the sdk. 2.support Rplidar S2
- Contributors: tony,WubinXia
1.10.0 (2019-02-22)
- Update RPLIDAR SDK to 1.10.0
- [new feature] support Rplidar S1
- Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rosconsole | |
| sensor_msgs | |
| std_srvs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/rplidar_a1.launch
- launch/rplidar_a2m12.launch
- launch/rplidar_a2m7.launch
- launch/rplidar_a2m8.launch
- launch/rplidar_a3.launch
- launch/rplidar_c1.launch
- launch/rplidar_s1.launch
- launch/rplidar_s1_tcp.launch
- launch/rplidar_s2.launch
- launch/rplidar_s2e.launch
- launch/rplidar_s3.launch
- launch/rplidar_t1.launch
- launch/test_rplidar.launch
- launch/test_rplidar_a3.launch
- launch/view_rplidar_a1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m12.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m7.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m8.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_c1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1_tcp.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2e.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_t1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 1.9.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/robopeak/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-08-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Slamtec ROS Maintainer
Authors
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin's workspace src folder
2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
roslaunch rplidar_ros view_rplidar.launch (for RPLIDAR A1/A2) or roslaunch rplidar_ros view_rplidar_a3.launch (for RPLIDAR A3)
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
roslaunch rplidar_ros rplidar.launch (for RPLIDAR A1/A2) or roslaunch rplidar_ros rplidar_a3.launch (for RPLIDAR A3)
rosrun rplidar_ros rplidarNodeClient
You should see rplidar’s scan result in the console
Notice: the different is serial_baudrate between A1/A2 and A3
RPLidar frame
RPLidar frame must be broadcasted according to picture shown in rplidar-frame.png
Changelog for package rplidar_ros
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
- Contributors: Ling, RoboPeak Public Repos
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rosconsole | |
| sensor_msgs | |
| std_srvs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/rplidar.launch
- launch/rplidar_a3.launch
- launch/test_rplidar.launch
- launch/test_rplidar_a3.launch
- launch/view_rplidar.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.5 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Slamtec ROS Maintainer
Authors
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
2.1.5 (2023-11-20)
- Update RPLIDAR SDK to 2.1.0
- Support RPLIDAR C1 (#142)
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- UltraDense protocol support
- support for stoppping A1 motor
- bugfix:start/stop_motor(service) cause lidar to stop scanning
- Fix build with C++14 && --march=native
- scan frequency configuration support
- Add launch file for RPLIDAR a2m*,C1
- Install udev rules via debian. (#126)
- Bugfix:create_udev_rules.sh dose not take effect immediately.
- When node starts to reset rplidar, if rplidar info is not obtained within 15 seconds, rplidar reset fails
- Add initial_reset option to reset rplidar on node start
- Compilation optimization
- Contributors: Babak-SSh, Tim Clephas, Tony Baltovski, Ubuntu248, Victor Belov, Wang DeYou, WubinXia, kint, yzx
2.0.0 (2021-10-8)
- Update RPLIDAR SDK to 2.0.0
- [new feature] 1.redesign the skelton of the sdk. 2.support Rplidar S2
- Contributors: tony,WubinXia
1.10.0 (2019-02-22)
- Update RPLIDAR SDK to 1.10.0
- [new feature] support Rplidar S1
- Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rosconsole | |
| sensor_msgs | |
| std_srvs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/rplidar_a1.launch
- launch/rplidar_a2m12.launch
- launch/rplidar_a2m7.launch
- launch/rplidar_a2m8.launch
- launch/rplidar_a3.launch
- launch/rplidar_c1.launch
- launch/rplidar_s1.launch
- launch/rplidar_s1_tcp.launch
- launch/rplidar_s2.launch
- launch/rplidar_s2e.launch
- launch/rplidar_s3.launch
- launch/rplidar_t1.launch
- launch/test_rplidar.launch
- launch/test_rplidar_a3.launch
- launch/view_rplidar_a1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m12.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m7.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m8.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_c1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1_tcp.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2e.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_t1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.5 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Slamtec ROS Maintainer
Authors
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
2.1.5 (2023-11-20)
- Update RPLIDAR SDK to 2.1.0
- Support RPLIDAR C1 (#142)
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- UltraDense protocol support
- support for stoppping A1 motor
- bugfix:start/stop_motor(service) cause lidar to stop scanning
- Fix build with C++14 && --march=native
- scan frequency configuration support
- Add launch file for RPLIDAR a2m*,C1
- Install udev rules via debian. (#126)
- Bugfix:create_udev_rules.sh dose not take effect immediately.
- When node starts to reset rplidar, if rplidar info is not obtained within 15 seconds, rplidar reset fails
- Add initial_reset option to reset rplidar on node start
- Compilation optimization
- Contributors: Babak-SSh, Tim Clephas, Tony Baltovski, Ubuntu248, Victor Belov, Wang DeYou, WubinXia, kint, yzx
2.0.0 (2021-10-8)
- Update RPLIDAR SDK to 2.0.0
- [new feature] 1.redesign the skelton of the sdk. 2.support Rplidar S2
- Contributors: tony,WubinXia
1.10.0 (2019-02-22)
- Update RPLIDAR SDK to 1.10.0
- [new feature] support Rplidar S1
- Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rosconsole | |
| sensor_msgs | |
| std_srvs | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| caster_base |
Launch files
- launch/rplidar_a1.launch
- launch/rplidar_a2m12.launch
- launch/rplidar_a2m7.launch
- launch/rplidar_a2m8.launch
- launch/rplidar_a3.launch
- launch/rplidar_c1.launch
- launch/rplidar_s1.launch
- launch/rplidar_s1_tcp.launch
- launch/rplidar_s2.launch
- launch/rplidar_s2e.launch
- launch/rplidar_s3.launch
- launch/rplidar_t1.launch
- launch/test_rplidar.launch
- launch/test_rplidar_a3.launch
- launch/view_rplidar_a1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m12.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m7.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m8.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_c1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1_tcp.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2e.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_t1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
ROS Distro
|
Package Summary
| Version | 2.1.5 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Slamtec ROS Maintainer
Authors
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file
Changelog for package rplidar_ros
2.1.5 (2023-11-20)
- Update RPLIDAR SDK to 2.1.0
- Support RPLIDAR C1 (#142)
- Re-implemented the data retrieving logic based on async fetching and decoding mechanism to improve performance
- UltraDense protocol support
- support for stoppping A1 motor
- bugfix:start/stop_motor(service) cause lidar to stop scanning
- Fix build with C++14 && --march=native
- scan frequency configuration support
- Add launch file for RPLIDAR a2m*,C1
- Install udev rules via debian. (#126)
- Bugfix:create_udev_rules.sh dose not take effect immediately.
- When node starts to reset rplidar, if rplidar info is not obtained within 15 seconds, rplidar reset fails
- Add initial_reset option to reset rplidar on node start
- Compilation optimization
- Contributors: Babak-SSh, Tim Clephas, Tony Baltovski, Ubuntu248, Victor Belov, Wang DeYou, WubinXia, kint, yzx
2.0.0 (2021-10-8)
- Update RPLIDAR SDK to 2.0.0
- [new feature] 1.redesign the skelton of the sdk. 2.support Rplidar S2
- Contributors: tony,WubinXia
1.10.0 (2019-02-22)
- Update RPLIDAR SDK to 1.10.0
- [new feature] support Rplidar S1
- Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rosconsole | |
| sensor_msgs | |
| std_srvs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/rplidar_a1.launch
- launch/rplidar_a2m12.launch
- launch/rplidar_a2m7.launch
- launch/rplidar_a2m8.launch
- launch/rplidar_a3.launch
- launch/rplidar_c1.launch
- launch/rplidar_s1.launch
- launch/rplidar_s1_tcp.launch
- launch/rplidar_s2.launch
- launch/rplidar_s2e.launch
- launch/rplidar_s3.launch
- launch/rplidar_t1.launch
- launch/test_rplidar.launch
- launch/test_rplidar_a3.launch
- launch/view_rplidar_a1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m12.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m7.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a2m8.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_a3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_c1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s1_tcp.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s2e.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_s3.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-
- launch/view_rplidar_t1.launch
- Used for visualising rplidar in action. It requires rplidar.launch.
-