
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
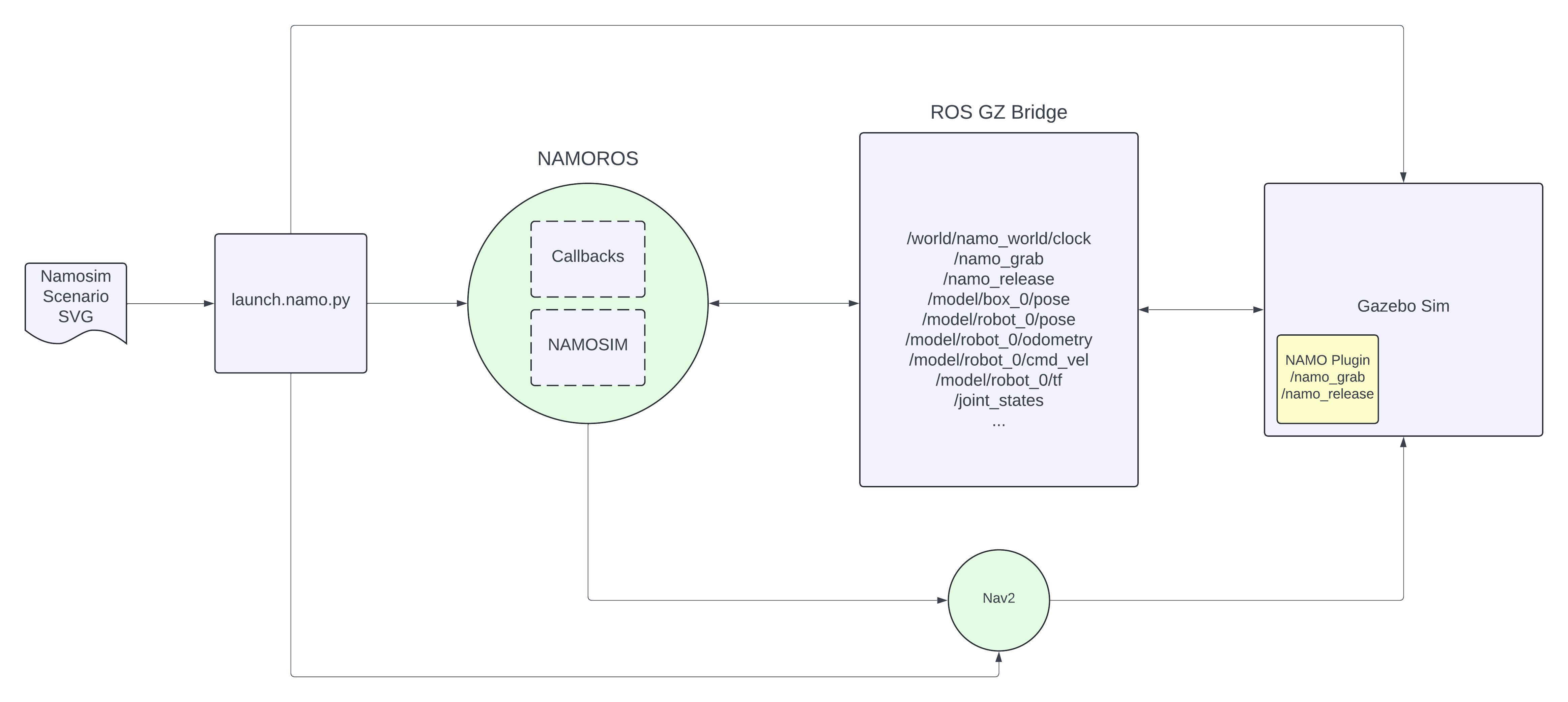
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
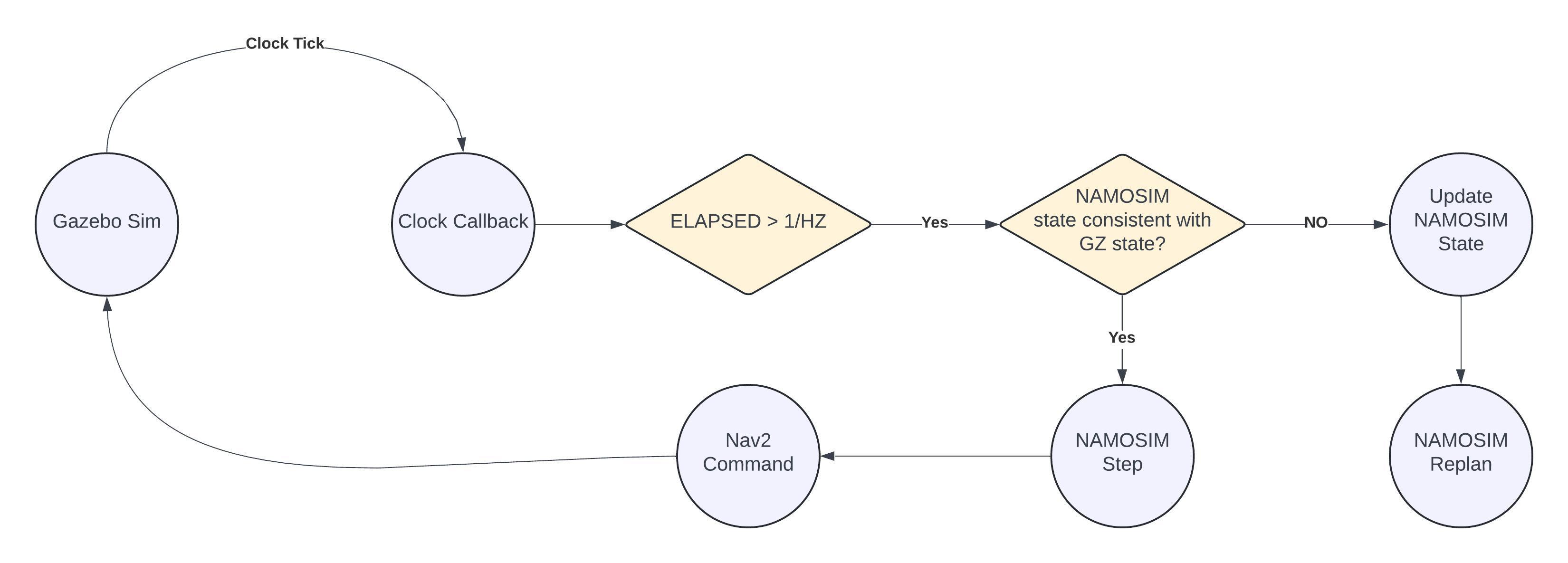
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged namoros at Robotics Stack Exchange
|
|
namoros package from namoros reponamoros namoros_gz namoros_msgs |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Chroma-CITI/namoros.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-10-09 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- David Brown
Authors
namoros
ROS2 nodes for executing namosim plans on real and Gazebo-simulated robots.
System Requirements
- Ubuntu 22.04
- ROS2 Humble
Demo
From the root of the repo run
colcon build
source install/setup.bash
Then launch the demo script.
./namoros/launch_demo.sh
Usage
Take a look at the demo script code for more details.
Usage on a Real Robot
The first step to run on a real robot is to prepare the map image and yaml files and the namo-config yaml file.
Note
The units of all namo_planner svg scenario files must be in centimeters!
High-Level Architecture
High-Level Internal Operation
Changelog for package namoros
0.0.1 (2025-09-26)
- update requirements
- docs
- clean up
- ci
- rosdep update
- fix tests
- add autostart param and fix demos
- Merge branch 'docs' into 'main' docs See merge request chroma/namo/namoros!2
- docs
- docs
- clean up
- clean up
- wait for gz sim to start
- Add goal succeeded behavior
- clean up
- clean up
- clean up
- fix subtle bugs
- make sure planner release obstacle when robot does
- set_current_action index on path
- refactor state management
- add three-robot scenario
- manually sync state before grab
- docs
- fix release node name
- stolen obstacle
- make compute_plan and update_plan async actions
- release
- release at start of each execution
- smooth path
- stolen obstacle
- fix backup behavior
- handle stolen obstacle conflicts
- add status markers
- progress on stolen obstacle conflict
- namoros
- Contributors: BROWN David, David Brown