
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
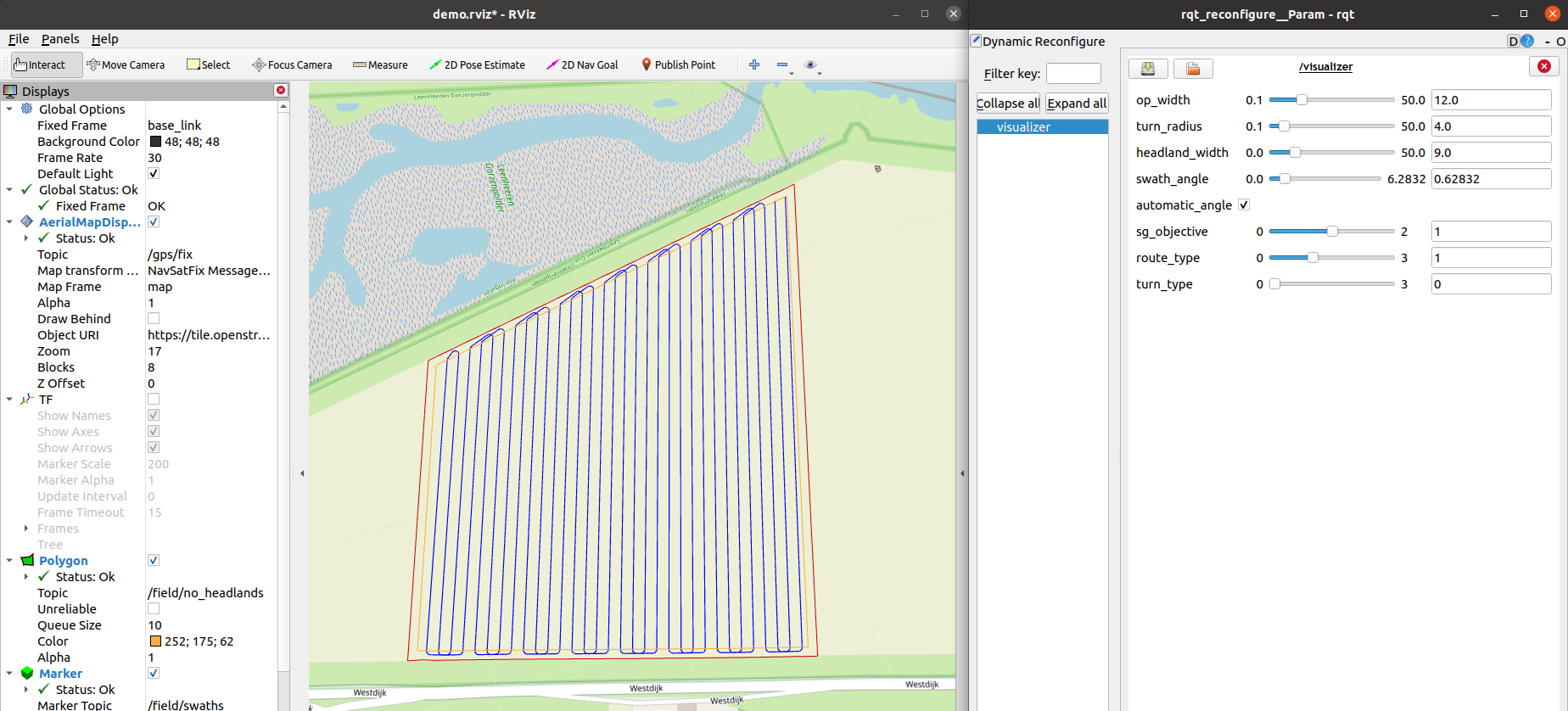
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged fields2cover_ros at Robotics Stack Exchange
|
|
fields2cover_ros package from fields2cover_ros repofields2cover_ros |
ROS Distro
|
Package Summary
| Version | 1.2.0 |
| License | BSD 3-Clause license |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Gonzalo Mier
Authors
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| rclcpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| nav_msgs | |
| message_generation | |
| fields2cover | |
| catkin | |
| ament_cmake | |
| message_runtime | |
| rosunit | |
| ament_cmake_gtest |