
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.
Repository Summary
| Checkout URI | https://github.com/Fields2Cover/fields2cover_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-02-06 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| fields2cover_ros | 1.2.0 |
README
Fields2Cover ROS
![]()
This package is an interface to ROS of the Fields2Cover library
![]()
Installation
This code has been tested with ROS1 noetic and melodic, and ROS2 galatic, humble and rolling.
ROS 1
First, install ROS noetic and create a workspace (from now: catkin_ws/ ).
From catkin_ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
catkin_make_isolated
ROS 2
Install ROS2 and create your workspace as mkdir ws.
From ws/ clone and compile the package as:
git clone https://github.com/Fields2Cover/Fields2Cover src/fields2cover
git clone https://github.com/Fields2Cover/fields2cover_ros src/fields2cover_ros
rosdep install -r --ignore-src -y --from-paths .
colcon build
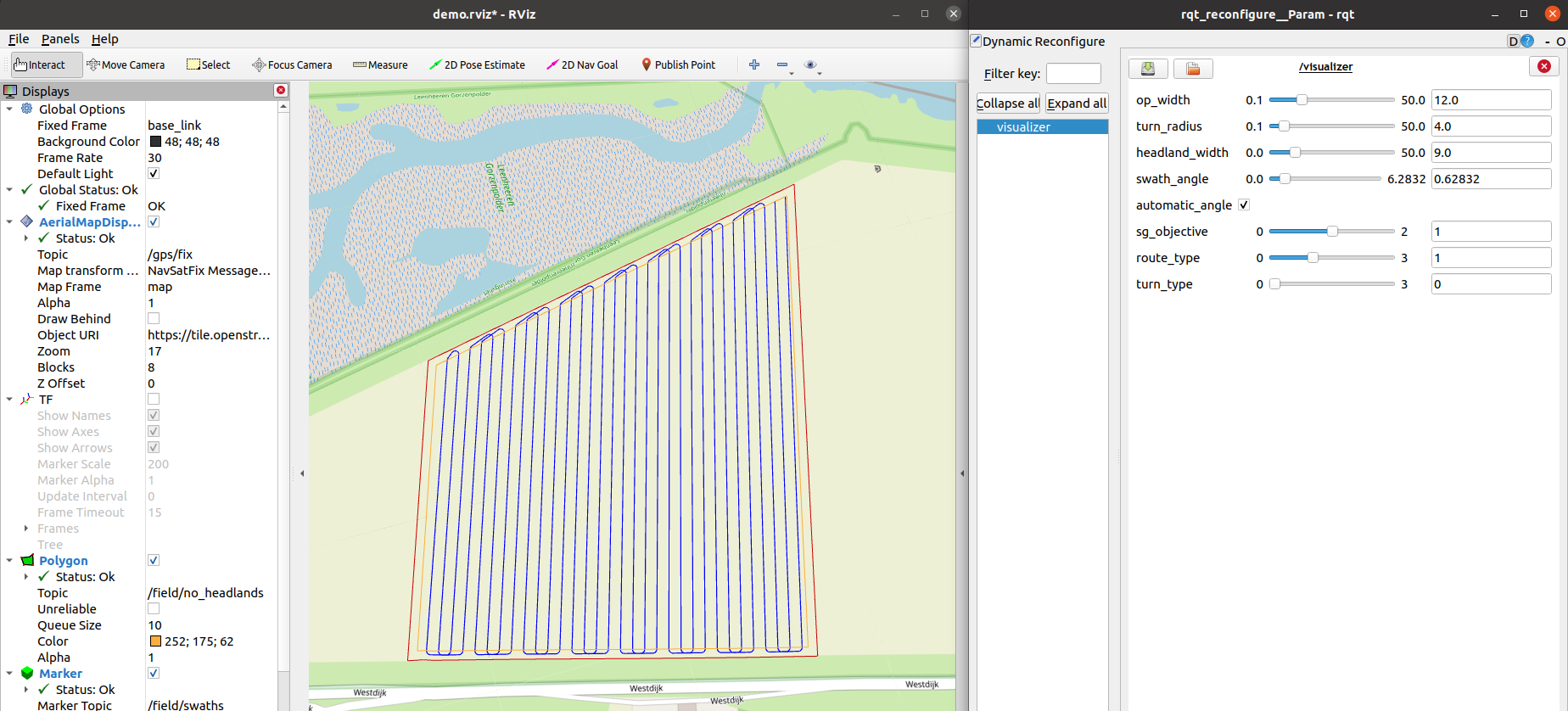
Running a demo (Only on ROS1)
To run an interactive demo, run:
roslaunch fields2cover_ros view_field.launch
A rviz and a rqt_reconfigure windows will appear, so you can interactively modify the path created:
Citing
Please cite the following paper when using Fields2Cover for your research:
@article{Mier_Fields2Cover_An_open-source_2022,
author = {Mier, Gonzalo and Valente, João and de Bruin, Sytze},
doi = {https://doi.org/10.48550/arXiv.2210.07838},
journal = {arXiv},
title = {{Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles}},
year = {2022}
}
Credits and more info
This code repository is part of the project Fields2Cover which is (partly) financed by the Dutch Research Council (NWO).