
|
serl_franka_controllers package from serl_franka_controllers reposerl_franka_controllers |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rail-berkeley/serl_franka_controllers.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-04-17 |
| Dev Status | MAINTAINED |
| CI status | Continuous Integration : 0 / 0 |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Charles Xu
Authors
- Jianlan Luo, Charles Xu
SERL Franka Controllers
Robot controller used in SERL (A Software Suite for Sample-Efficient Robotic Reinforcement Learning)
Serl Website and Paper: https://serl-robot.github.io/
serl_franka_controllers is a ROS package designed to control Franka Emika Robot through libfranka and franka_ros. This package provides a compliant yet accurate Cartesian Impedance Controller for safe online reinforcement learning algorithms, as well as a Joint Position Controller for resetting arm.
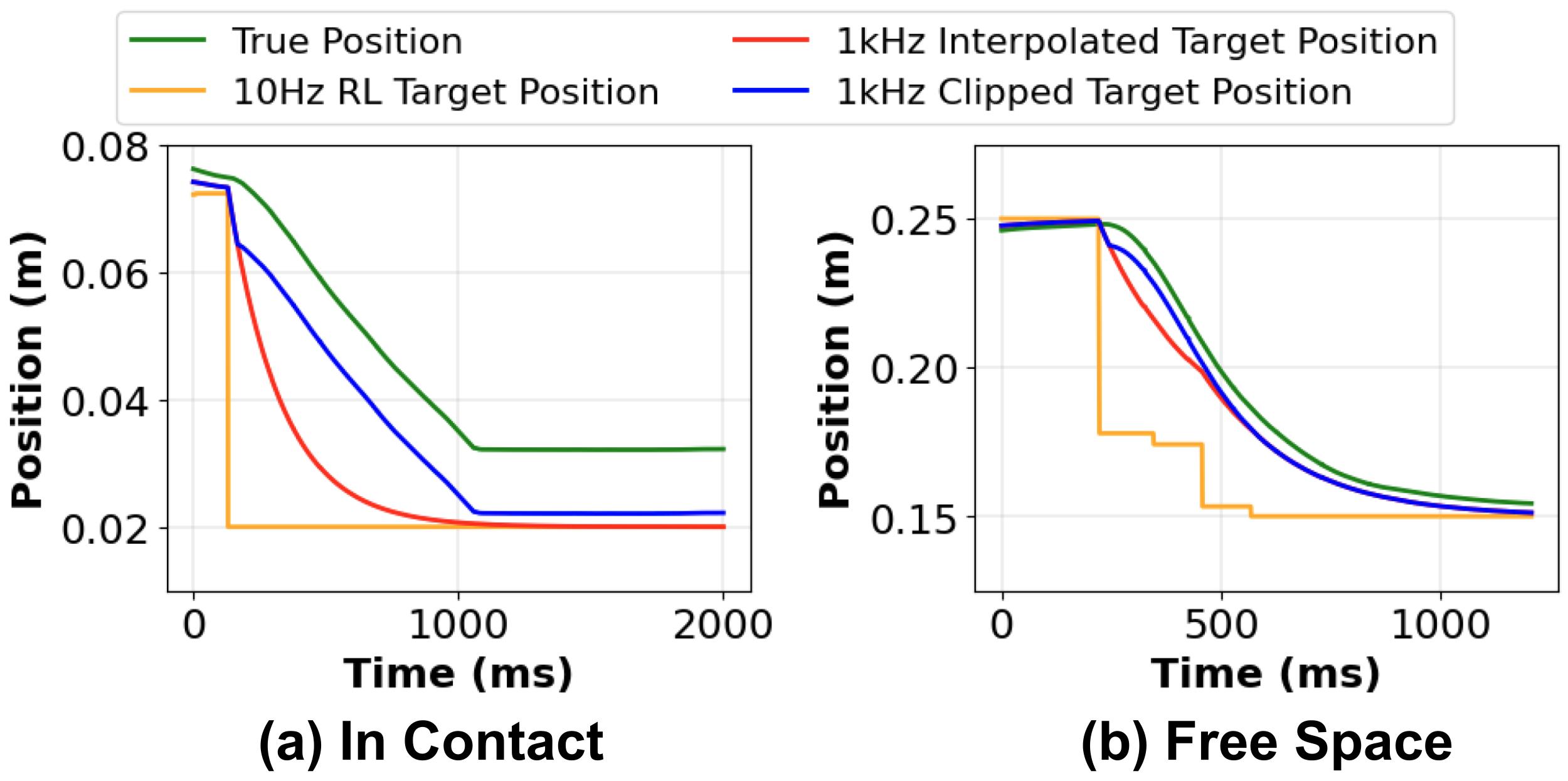
Compliance and accuracy is achieved at the same time by limiting the reference point of the Impedance controller to be within a certain distance from the current pose in the realtime loop. This way, a high gain can be used for accuracy without excess force when in contact.
Installation
Prerequisites
- ROS Noetic
- Installation of
libfranka>=0.8.0andfranka_ros>=0.8.0according to the Franka FCI Documentation
sudo apt install ros-noetic-libfranka ros-noetic-franka-ros
Installing via apt-get
sudo apt-get install ros-serl_franka_controllers
Installing from Source
cd ~/catkin_ws/src
git clone git@github.com:rail-berkeley/serl_franka_controllers.git
cd ~/catkin_ws
catkin_make --pkg serl_franka_controllers
source ~/catkin_ws/devel/setup.bash
Realtime Constraint
The franka_ros requires a realtime kernel by default. This is not possible if you want to install CUDA on the same machine. A workaround is to ignore the realtime constraint in catkin_ws/src/franka_ros/franka_control/config/franka_control_node.yaml
realtime_config: ignore
Usage
Cartesian Impedance Controller
To launch the Cartesian Impedance Controller, use:
roslaunch serl_franka_controllers impedance.launch robot_ip:=<RobotIP> load_gripper:=<true/false>
Replace
Compliance parameters for the controller can be adjusted in an interactive GUI by running rosrun rqt_reconfigure rqt_reconfigure. This can also be achieved in Python code as demonstrated in the example section.
Joint Position Controller
For resetting or moving the robot to a specific joint position, launch the joint position controller:
rosparam set /target_joint_positions '[q1, q2, q3, q4, q5, q6, q7]'
roslaunch serl_franka_controllers joint.launch robot_ip:=<RobotIP> load_gripper:=<true/false>
Here, you also need to replace [q1, q2, q3, q4, q5, q6, q7] with the desired joint positions.
rospy Example
We include a requirements.txt and python script to show one way of interacting with the controller. This script shows how to adjust the reference limiting values and how to send robot commands through ROS Topics and dynamic_reconfigure. To use this, run
conda create -n serl_controller python=3.8
conda activate serl_controller
pip install -r requirements.txt
python test/test.py --robot_ip=ROBOT_IP
Changelog for package serl_franka_controllers
0.1.1 (2024-02-06)
- add installation instruction
- Update package.xml license
- Merge pull request #3 from rail-berkeley/release-bloom bloom license and pkg name
- bloom license and pkg name
- Merge pull request #2 from rail-berkeley/clean-pkg Cleanup before pushing pkg to upstream
- more lint
- added rename launchfile
- fix bug, correct spelling to impedance
- pkg and impl cleanup
- Merge pull request #1 from rail-berkeley/dev New controller package
- update image
- add plot in readme
- Update README.md
- update readme
- add readme, edit package info, add jacobian message, add test
- changed default value
- add launch file and remove rviz
- new ros package with only carteasian impedance controller and joint position controller fo reset
- Initial commit
- Contributors: Charles Xu, Charles xu, Jianlan Luo, youliang
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
Launch files
- launch/joint.launch
-
- robot_ip
- load_gripper [default: true]
- launch/impedance.launch
-
- robot_ip
- load_gripper [default: true]