
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.18 |
| License | Apache License, Version 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PlanSys2/ros2_planning_system.git |
| VCS Type | git |
| VCS Version | jazzy-devel |
| Last Updated | 2025-01-07 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Francisco Martin Rico
Authors
Executor
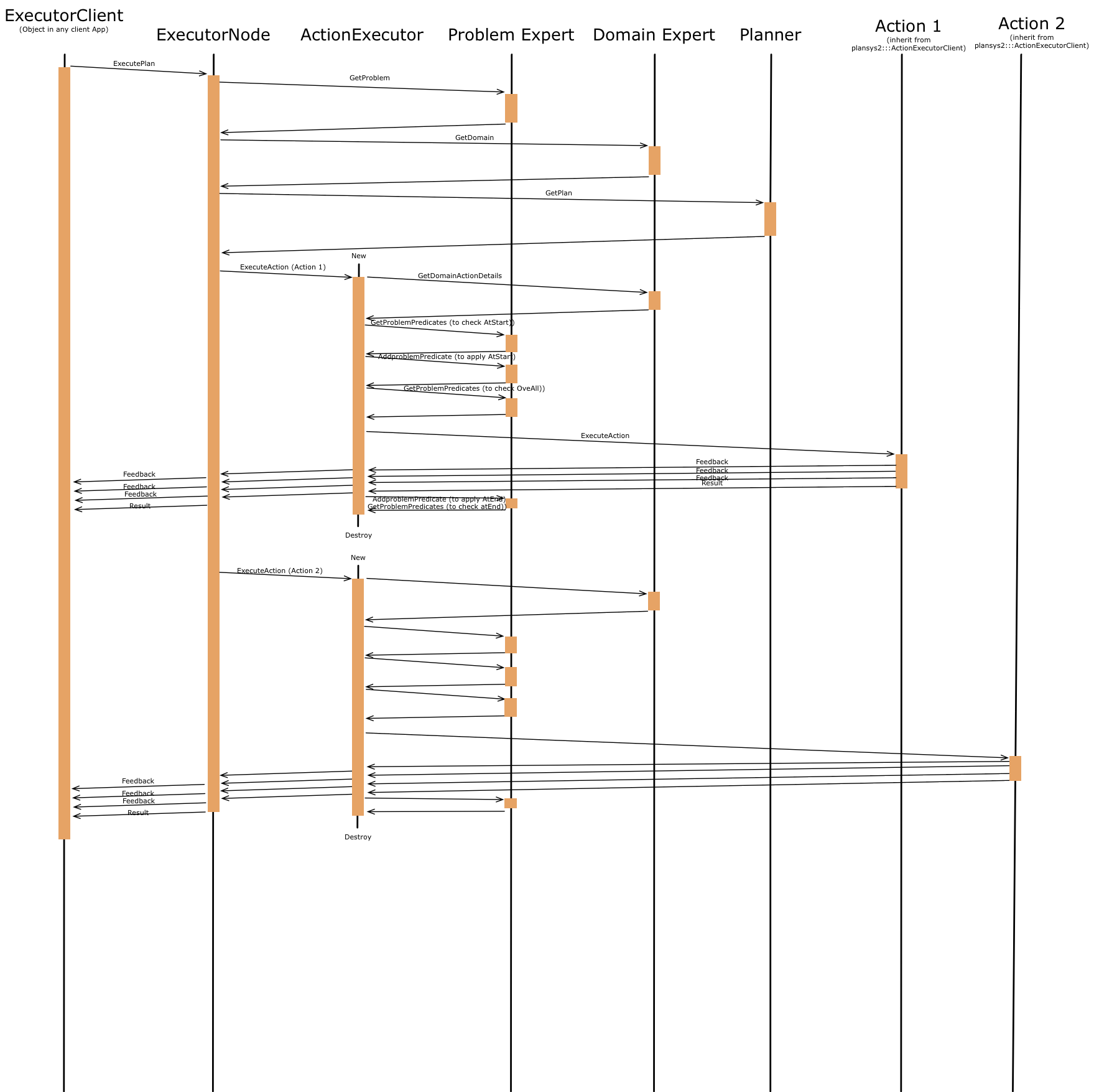
The Executor module is responsible for requesting a plan to the Planner, and carry it out, calling to the nodes in the client application that implements the actions. While executing each action, it checks the requisites (At Start, At End and Over all, in case of durative Actions). If the requirements are not meet, it cancels the plan execution. It also is responsible for applying the effects of the actions, requesting updates to the Problem Expert.
The main class of Executor is plansys2::ExecutorNode, which is instantiated from executor_node.cpp.
The executions of plans are carried out using ROS2 actions, in particular, plansys2_msgs::action::ExecutePlan. Take note that the goal must be already in the Domain Expert.
ExecutorNode ask for the domain and problem, and ask for a plan to the Planner. For each action in the plan, ExecuterNode creates a plansys2::ActionExecutor. The lifetime of this object is only one action. This object calls the actions implemented in the client appliciation using the ROS2 actions plansys2_msgs::action::ExecuteAction. Each client action implementation can use the class plansys2::ActionExecutorClient to avoid the complexity of managing ROS2 actions.
Using the feedback information from plansys2_msgs::action::ExecuteAction, feedback for plansys2::ExecutorNode is composed and returned to plansys2::ExecutorClient. It contains the current action in the plan and the progress in the currently executing action.
Next graph shows an example of the execution flow:
Actions:
-
/execute_plan[plansys2_msgs::action::ExecutePlan]
(in ActionExecutorClient)
-
/${ACTION_NAME}[plansys2_msgs::action::ExecuteAction]
Services:
-
/executor/get_ordered_sub_goals[plansys2_msgs::srv::GetOrderedSubGoals]
Subscribed topics:
(in ActionExecutor)
-
/problem_expert/update_notify[std_msgs::msg::Empty]
Parameters:
(in ExecutorNode)
-
~/action_timeouts/actions[list of strings]- List of actions which have duration overrun percentages specified.
-
~/action_timeouts/[ACTION_NAME]/duration_overrun_percentage[double]- Defines the allowable time overrun of an action based on a percentage of the predicted plan duration. For example, if the plan predicts that an action should take 1000 secs and a duration overrun percentage of 20% is specified, then the action should be halted if the actual duration exceeds 1200 secs.
executor:
ros__parameters:
action_timeouts:
actions: ["move"]
move:
duration_overrun_percentage: 20.0
Changelog for package plansys2_executor
2.0.18 (2024-12-30)
- Fix get plan services
- Contributors: Francisco Martín Rico
2.0.17 (2024-12-30)
- Fixing Eigen deps
- Contributors: Francisco Martín Rico
2.0.16 (2024-12-30)
- Fixing Eigen deps
- Contributors: Francisco Martín Rico
2.0.15 (2024-12-03)
- Fixing Eigen dep
- Contributors: Francisco Martín Rico
2.0.14 (2024-11-14)
- Add Eigen depends in package.xml
- Contributors: Francisco Martín Rico
2.0.13 (2024-11-06)
- Change to EventsExecutor
- Contributors: Francisco Martín Rico
2.0.12 (2024-10-16)
- add ActionVariant
- execute regular actions
- Remove cmake warning
- Fix ccplinti and uncrustify
- fail execute_plan action if initial conditions changed We terminate the program is many senarios instead of just returning an explict value. We used to terminate if the initial conditions changed before the plan is started. Now just send a result that the action server failed to execute the plan
- Send Cancelation response to ActionClient
- ExecutorNode, remove unused ros node
- Removed some small references still related to the old version of BehaviorTree
- Bump Behaviortree.CPP v3 to v4 - fix executor test
- Fix Timeout BT Node
- Adding imports to stn builder
- Fixing line-length
- Adding duration to dotgraphs.
- Restore tests and enable warnings
- Revert STN changes in Executor BT
- Removing unused or commented out code.
- Updating ComputeBT.cpp.
- Fix Terminal and executor bugs
- Fixing bug in propagation step.
- Adding dependency on eigen3_cmake_module to plansys2_executor.
- Fixing min time bounds in STN to adhere to plan times.
- Adding some print statements to help with debugging.
- Saving progress.
- Removing unused code. Debuggin get_threat function.
- Simplifying bound checkin logic.
- Update and propagate time constraints after applying effects.
- Adding action graph to blackboard.
- Moving STNBTBuilder node and graph structures to parent class.
- Ensure that every start node has direct link to end node in BT.
- Change MultiThreaded for SingleThreaded in CI failing tests
- Change double quotes for simple ones (linter)
- Insert in blackboard the action ROS 2 Node
- Adding Eigen3 dependency to plansys2_executor.
- Removing redundant get_current_time function.
- Fixing RCLCPP_ERROR message bug.
- Fixing colcon build warning.
- Fixing colcon build warnings.
- Cleaning up code for merge request.
- Cleaning up changes.
- Match example is now working!
- Modified BT by hand to get plan to succeed.
- BT not finishing.
- Fixing bug with updating STN time bounds.
- Adding time propagation step.
- Don't check time limits on start-end connections.
- Supporting time-triggered execution.
- Checking for self-referencing edges in STNBTBuilder. Adding standalone compute_bt service.
- bt-builder-plugins: Setting default BT builder plugin to SimpleBTBuilder.
- bt-builder-plugins: Creating BT builder plugin interface. Moving current BT builder to plugin named SimpleBTBuilder. Adding new and improved STN-based BT builder plugin named STNBTBuilder.
- Check at end reqs in bt builder
- Change MultiThreaded for SingleThreaded in CI failing tests
- Insert in blackboard the action ROS 2 Node
- Checking for self-referencing edges in STNBTBuilder. Adding standalone compute_bt service.
- bt-builder-plugins: Setting default BT builder plugin to SimpleBTBuilder.
- bt-builder-plugins: Creating BT builder plugin interface. Moving current BT builder to plugin named SimpleBTBuilder. Adding new and improved STN-based BT builder plugin named STNBTBuilder.
- Contributors: Alexander Xydes, Andrianov Roman, Francisco Martín Rico, Gustavo, Josh Zapf, Marco Roveri, Mostafa Gomaa, Samuele Sandrini, Splinter1984, robodrome
2.0.9 (2022-07-10)
- Humble Upgrade
- Fix possible bug https://github.com/ros2/rclcpp/issues/1968
- Expose lifecyclemanager timeout as a parameter, other misc fixes/features
- Linters are explicit
- Add ctor to ExecutorClient for varying node name
- Fix uninitialized variable in ExecutorClient
- Contributors: Francisco Martín Rico, Jake Keller
2.0.8 (2022-05-04)
2.0.7 (2022-05-04)
2.0.6 (2022-05-03)
2.0.5 (2022-05-03)
2.0.4 (2022-05-03)
- Fix version
- Merge pull request #223 from IntelligentRoboticsLabs/fix_threads_buildfarm Fix threads buildfarm
- Fix ROS2 Buildfarm error due to Threads
- Merge pull request #217 from jjzapf/check-action-finished Check action finished
- check-action-finished: Putting leftover requirement check after state update in get_graph function.
- check-action-finished: Use distinct names for temporary predicate/function variables inside of while loop.
- check-action-finished: Reverting previous changes. Adding checks to WaitAction node to verify that action has finished.
- check-action-finished: Fixing problem_expert.wait_overall_req_test in plansys2_executor/bt_node_test.cpp.
- check-action-finished: Do not declare failure in check_overall_req_node if action has already finished.
- Merge pull request #209 from sarcasticnature/master Improvements on recent BtActionNode changes
- Merge pull request #216 from jjzapf/action-graph-bug-fix Plan-to-Action Graph Bug Fix
- action-graph-bug-fix: Not applying at end effects when testing if actions can be run in parallel. Fixing bug in prune_backwards function.
- Update unit tests to match changes
- Remove extra do_work() call in on_activate() do_work() may call the function finish(), which will fail to deactivate the node if it is still in the on_activate callback.
- Merge branch 'IntelligentRoboticsLabs:master' into master
- Merge pull request #208 from xydesa/plan-dotgraph-bug Plan dotgraph color bug
- Merge branch 'IntelligentRoboticsLabs:master' into master
- Removing unused variable.
- More accurately getting the status of an action by including the action's start time in the index for coloring the dotgraph.
- Contributors: Alexander Xydes, Francisco Martín Rico, Jake Keller, Josh Zapf
2.0.3 (2022-04-03)
2.0.2 (2022-04-03)
- Use apply and check method to create action graph
- plan-to-action-graph-mod: Using apply and check method to search for causal links.
- generalize-is-parallelizable: Cleaning up comments a bit.
- generalize-is-parallelizable: Checking for contradictions at any point in time in the is_parallelizable function.
- generalize-is-parallelizable: Improving human readability.
- generalize-is-parallelizable: Applying ament uncrustify.
- generalize-is-parallelizable: Generalizing the is_parallelizable function in BTBuilder so that the functions will also be checked.
- action-graph-test: Adding unit test to verify action graph generation.
- action-graph-fix: Using std::list to create action graph rather than …
- action-graph-fix: Shortening line lengths to <100 characters. Applying ament uncrustify.
- action-graph-fix: Checking for existing link before adding one when creating action graph.
- Check all reqs and effect for roots
- action-graph-fix: Setting executor_test TIMEOUT value to 300.
- Add options to run command in plansys2 Terminal
- Change runtime failures to BT::NodeStatus::FAILURE, add logging info to ExecutorClient
- Add options to run command
- action-graph-fix: Using std::list to create action graph rather than std::set. A std::set does not maintain insertion order, whereas a std::list does. Maintaining insertion order guarantees that graph traversal follows the same path as graph creation.
- action-graph-test: Adding unit test to verify action graph generation.
- Add Status recency in performers
- Remove unnecessary node pointer
- Merge branch 'IntelligentRoboticsLabs:master' into master
- Logger tool - performers and plan
- Logger tool - knowledge, info and action hub
- Elevate failure logging from INFO to WARN/ERROR
- Add action failure details to ExecutorClient
- Contributors: Francisco Martín Rico, Jake Keller, Josh Zapf
2.0.1 (2022-02-03)
- Update deprecated APIs in launchers and parameters
- Update launcher param names
- Improve debug info
- remove-invalid-goals: Removing invalid goals when instances are removed. Keep track of update time in problem expert.
- Merge galactic-devel
- Contributors: Francisco Martín Rico, Josh Zapf
2.0.0 (2021-07-04)
- Fix default param
- Solve statically parameter error
- Fix compile issues for galactic
- Compile for ROS2 Galactic
- Contributors: Francisco Martín Rico, Jonatan Olofsson, bjnjo
1.0.10 (2021-07-03)
- Minor update
- Fix tests
- Fix rate conversions
- Add rate parameter
- Remove node parameter in client constructors
- ros2-plan-msg: Passing plan to executor to add further separation between plan creation and plan execution.
- Suggestion for #118
- pddl-tree-messages: Performing some minor cleanup.
- pddl-tree-messages: Using explicit specifier for single parameter constructors in plansys2_core/Types.hpp.
- pddl-tree-messages: Replacing user access function calls with shorter versions where possible.
- pddl-tree-messages: Adding predicate user access functions to problem expert client.
- pddl-tree-messages: Adding predicate user access functions to problem expert client.
- pddl-tree-messages: Applying ament uncrustify.
- pddl-tree-messages: Updating addInstance and removeInstance calls to use helper classes.
- pddl-tree-messages: Reverting change to log statement severity.
- pddl-tree-messages: Removing a couple unnecessary includes.
- pddl-tree-messages: Merging master and resolving conflicts.
- action-timeout-clean: Renaming test behavior tree.
- Using custom behavior tree to enable action timeouts.
- pddl-tree-messages: Merging upstream master and resolving conflicts.
- pddl-tree-messages: Using ROS messages to define the PDDL construct trees.
- Adding action execution status (as color changes) to the plan dotgraph. Adding legend to plan dotgraph, adding node params for dotgraph legend and printing plan graph to terminal.
- Fix tests and linting
- linting
- Configurable action BT
- Configurable BT Action
- Reducing log message severity because lack of a plan isn't necessarily an error.
- Reduce debug output
- Plansys2_tests package
- Adding unit test for getOrderedSubGoals.
- Add GetOrderedSubGoals service to Executor, allowing executor clients to get the order in which sub-goals will be completed by the current plan.
- Update version
- Contributors: Alexander Xydes, Francisco Martín Rico, Greg Kogut, Josh Zapf
1.0.9 (2021-03-15)
- Disable boost in tests
* Contributors: Francisco Martín Rico 1.0.8 (2021-03-12) ------------------* Change default ZMQ ports * Removing whitespace. * Simplified logic. * Update API for FutureReturnCode * Handling edge cases of action failure and preventing overriding completion percentage on action completion. * Publishing generated plan as a dotgraph on a string topic. * Fix BT creation; parallel deps actions * Fixing feedback control * Action execution refactoring * Moving Utils file to plansys2_problem_expert since all the functions are checking information in the problem or modifying the problem. * utils-bug: Fixing bug in OR case of evaluate function in plansys2_executor/Utils.cpp. * Making zmq error message more generic to reflect that there are multiple possible reasons for a BT::LogicError to be thrown. * Add support to plansys2_executor/ExecutorNode for visualizing the behavior trees in Groot. * Moving publisher on_activate call to the ExecutorNode::on_activate callback. * Add support for numeric conditions and effects. * Monitorization info * Remove an unreshable return * Adding actor checker in terminal * Improving BTActions * Fix repeated nodes * New Graph creation Algorithm * Debugging * Added negative predicates support * Namespaced action_hub * Contributors: Alexander Xydes, Fabrice Larribe, Francisco Martin Rico, Greg Kogut, Josh Zapf
1.0.7 (2021-01-04)
- Making explicit dependencies
* Contributors: Francisco Martín Rico 1.0.6 (2020-12-29) ------------------* Disable boost functions * Contributors: Francisco Martín Rico 1.0.5 (2020-12-28) ------------------* Migration to c++17 * Contributors: Francisco Martín Rico
1.0.4 (2020-12-24)
1.0.3 (2020-12-23)
1.0.2 (2020-12-23)
- Plan solvers as plugins
- Contributors: Fabrice Larribe, Francisco Martin Rico, f269858
1.0.1 (2020-07-19)
1.0.0 (2020-07-19)
- Foxy initial version
- Boost:optional
- Support for BT actions
- Contributors: Francisco Martin Rico
0.0.8 (2020-07-18)
- Add BT support
- Contributors: Francisco Martin Rico
0.0.7 (2020-03-26)
- ActionExecutorClient is cascade_lifecycle Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>>
- Contributors: Francisco Martin Rico
0.0.6 (2020-03-23)
- Run in separate namespaces. Monolothic node Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>>
- Contributors: Francisco Martin Rico
0.0.5 (2020-01-12)
0.0.4 (2020-01-09)
- Adding missing action dependencies Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>>
* Contributors: Francisco Martín Rico 0.0.3 (2020-01-09) ------------------* Add popf dependency Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Contributors: Francisco Martín Rico 0.0.2 (2020-01-08) ------------------* Merge pull request #16 from IntelligentRoboticsLabs/pddl_parser_rename Rename pddl_parser * Rename pddl_parser Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Merge pull request #15 from IntelligentRoboticsLabs/example_rename Rename example. Small bug in timeouts * Linting Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Rename example. Small bug in timeouts Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Merge pull request #12 from IntelligentRoboticsLabs/actions_composition Define rate dynamically * Define rate dynamically Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Packages.xml description Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Adding documentation Signed-off-by: Francisco Martin Rico <<fmartin@gsyc.urjc.es>> * Setting CI Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Setting CI Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Setting CI Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Setting CI Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * onActivate and onFinished methods for Action Clients Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * First functional version complete Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Execute actions independiently. Example Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Change to lowercasegit Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Executor initial version Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Contributors: Francisco Martin Rico
Wiki Tutorials
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged plansys2_executor at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.11 |
| License | Apache License, Version 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/PlanSys2/ros2_planning_system.git |
| VCS Type | git |
| VCS Version | iron-devel |
| Last Updated | 2023-08-02 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Francisco Martin Rico
Authors
Executor
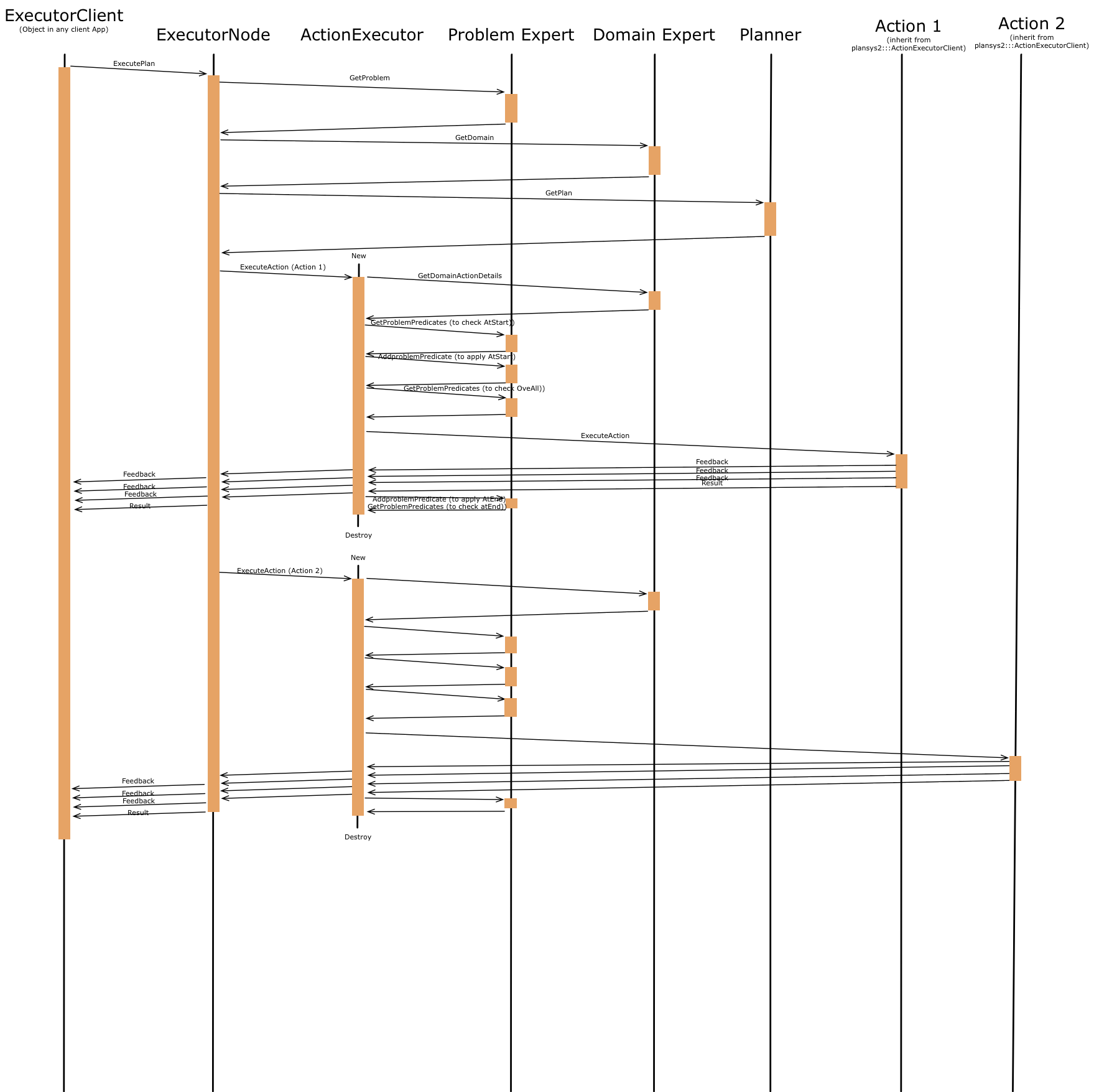
The Executor module is responsible for requesting a plan to the Planner, and carry it out, calling to the nodes in the client application that implements the actions. While executing each action, it checks the requisites (At Start, At End and Over all, in case of durative Actions). If the requirements are not meet, it cancels the plan execution. It also is responsible for applying the effects of the actions, requesting updates to the Problem Expert.
The main class of Executor is plansys2::ExecutorNode, which is instantiated from executor_node.cpp.
The executions of plans are carried out using ROS2 actions, in particular, plansys2_msgs::action::ExecutePlan. Take note that the goal must be already in the Domain Expert.
ExecutorNode ask for the domain and problem, and ask for a plan to the Planner. For each action in the plan, ExecuterNode creates a plansys2::ActionExecutor. The lifetime of this object is only one action. This object calls the actions implemented in the client appliciation using the ROS2 actions plansys2_msgs::action::ExecuteAction. Each client action implementation can use the class plansys2::ActionExecutorClient to avoid the complexity of managing ROS2 actions.
Using the feedback information from plansys2_msgs::action::ExecuteAction, feedback for plansys2::ExecutorNode is composed and returned to plansys2::ExecutorClient. It contains the current action in the plan and the progress in the currently executing action.
Next graph shows an example of the execution flow:
Actions:
-
/execute_plan[plansys2_msgs::action::ExecutePlan]
(in ActionExecutorClient)
-
/${ACTION_NAME}[plansys2_msgs::action::ExecuteAction]
Services:
-
/executor/get_ordered_sub_goals[plansys2_msgs::srv::GetOrderedSubGoals]
Subscribed topics:
(in ActionExecutor)
-
/problem_expert/update_notify[std_msgs::msg::Empty]
Parameters:
(in ExecutorNode)
-
~/action_timeouts/actions[list of strings]- List of actions which have duration overrun percentages specified.
-
~/action_timeouts/[ACTION_NAME]/duration_overrun_percentage[double]- Defines the allowable time overrun of an action based on a percentage of the predicted plan duration. For example, if the plan predicts that an action should take 1000 secs and a duration overrun percentage of 20% is specified, then the action should be halted if the actual duration exceeds 1200 secs.
executor:
ros__parameters:
action_timeouts:
actions: ["move"]
move:
duration_overrun_percentage: 20.0
Changelog for package plansys2_executor
2.0.11 (2023-08-02)
2.0.10 (2023-07-17)
- Merge remote-tracking branch 'origin/humble-devel'
- Merge pull request #252 from PlanSys2/check_at_end Check at end reqs in bt builder
- Check at end reqs in bt builder
- Merge pull request #251 from PlanSys2/fix_bt_node Fix bt node
- Change MultiThreaded for SingleThreaded in CI failing tests
- Change double quotes for simple ones (linter)
- Insert in blackboard the action ROS 2 Node
- Merge pull request #247 from jjzapf/standalone-bt-builder Standalone BT Builder Service
- Fixing cpplint warning.
- Fixing cpplint warnings.
- Checking for self-referencing edges in STNBTBuilder. Adding standalone compute_bt service.
- Merge remote-tracking branch 'origin/master' into fix_goal_structure_issue_205
- Merge pull request #240 from jjzapf/bt-builder-plugins New BT Builder and Plugin Interface
- bt-builder-plugins: Setting default BT builder plugin to SimpleBTBuilder.
- bt-builder-plugins: Creating BT builder plugin interface. Moving current BT builder to plugin named SimpleBTBuilder. Adding new and improved STN-based BT builder plugin named STNBTBuilder.
- Merge remote-tracking branch 'origin/master' into fix_goal_structure_issue_205
- Merge remote-tracking branch 'upstream/master'
- Merge branch 'IntelligentRoboticsLabs:master' into master
- Contributors: Andrianov Roman, Francisco Martín Rico, Josh Zapf, Marco Roveri, Splinter1984
2.0.9 (2022-07-10)
- Humble Upgrade
- Fix possible bug https://github.com/ros2/rclcpp/issues/1968
- Expose lifecyclemanager timeout as a parameter, other misc fixes/features
- Linters are explicit
- Add ctor to ExecutorClient for varying node name
- Fix uninitialized variable in ExecutorClient
- Contributors: Francisco Martín Rico, Jake Keller
2.0.8 (2022-05-04)
2.0.7 (2022-05-04)
2.0.6 (2022-05-03)
2.0.5 (2022-05-03)
2.0.4 (2022-05-03)
- Fix version
- Merge pull request #223 from IntelligentRoboticsLabs/fix_threads_buildfarm Fix threads buildfarm
- Fix ROS2 Buildfarm error due to Threads
- Merge pull request #217 from jjzapf/check-action-finished Check action finished
- check-action-finished: Putting leftover requirement check after state update in get_graph function.
- check-action-finished: Use distinct names for temporary predicate/function variables inside of while loop.
- check-action-finished: Reverting previous changes. Adding checks to WaitAction node to verify that action has finished.
- check-action-finished: Fixing problem_expert.wait_overall_req_test in plansys2_executor/bt_node_test.cpp.
- check-action-finished: Do not declare failure in check_overall_req_node if action has already finished.
- Merge pull request #209 from sarcasticnature/master Improvements on recent BtActionNode changes
- Merge pull request #216 from jjzapf/action-graph-bug-fix Plan-to-Action Graph Bug Fix
- action-graph-bug-fix: Not applying at end effects when testing if actions can be run in parallel. Fixing bug in prune_backwards function.
- Update unit tests to match changes
- Remove extra do_work() call in on_activate() do_work() may call the function finish(), which will fail to deactivate the node if it is still in the on_activate callback.
- Merge branch 'IntelligentRoboticsLabs:master' into master
- Merge pull request #208 from xydesa/plan-dotgraph-bug Plan dotgraph color bug
- Merge branch 'IntelligentRoboticsLabs:master' into master
- Removing unused variable.
- More accurately getting the status of an action by including the action's start time in the index for coloring the dotgraph.
- Contributors: Alexander Xydes, Francisco Martín Rico, Jake Keller, Josh Zapf
2.0.3 (2022-04-03)
2.0.2 (2022-04-03)
- Use apply and check method to create action graph
- plan-to-action-graph-mod: Using apply and check method to search for causal links.
- generalize-is-parallelizable: Cleaning up comments a bit.
- generalize-is-parallelizable: Checking for contradictions at any point in time in the is_parallelizable function.
- generalize-is-parallelizable: Improving human readability.
- generalize-is-parallelizable: Applying ament uncrustify.
- generalize-is-parallelizable: Generalizing the is_parallelizable function in BTBuilder so that the functions will also be checked.
- action-graph-test: Adding unit test to verify action graph generation.
- action-graph-fix: Using std::list to create action graph rather than …
- action-graph-fix: Shortening line lengths to <100 characters. Applying ament uncrustify.
- action-graph-fix: Checking for existing link before adding one when creating action graph.
- Check all reqs and effect for roots
- action-graph-fix: Setting executor_test TIMEOUT value to 300.
- Add options to run command in plansys2 Terminal
- Change runtime failures to BT::NodeStatus::FAILURE, add logging info to ExecutorClient
- Add options to run command
- action-graph-fix: Using std::list to create action graph rather than std::set. A std::set does not maintain insertion order, whereas a std::list does. Maintaining insertion order guarantees that graph traversal follows the same path as graph creation.
- action-graph-test: Adding unit test to verify action graph generation.
- Add Status recency in performers
- Remove unnecessary node pointer
- Merge branch 'IntelligentRoboticsLabs:master' into master
- Logger tool - performers and plan
- Logger tool - knowledge, info and action hub
- Elevate failure logging from INFO to WARN/ERROR
- Add action failure details to ExecutorClient
- Contributors: Francisco Martín Rico, Jake Keller, Josh Zapf
2.0.1 (2022-02-03)
- Update deprecated APIs in launchers and parameters
- Update launcher param names
- Improve debug info
- remove-invalid-goals: Removing invalid goals when instances are removed. Keep track of update time in problem expert.
- Merge galactic-devel
- Contributors: Francisco Martín Rico, Josh Zapf
2.0.0 (2021-07-04)
- Fix default param
- Solve statically parameter error
- Fix compile issues for galactic
- Compile for ROS2 Galactic
- Contributors: Francisco Martín Rico, Jonatan Olofsson, bjnjo
1.0.10 (2021-07-03)
- Minor update
- Fix tests
- Fix rate conversions
- Add rate parameter
- Remove node parameter in client constructors
- ros2-plan-msg: Passing plan to executor to add further separation between plan creation and plan execution.
- Suggestion for #118
- pddl-tree-messages: Performing some minor cleanup.
- pddl-tree-messages: Using explicit specifier for single parameter constructors in plansys2_core/Types.hpp.
- pddl-tree-messages: Replacing user access function calls with shorter versions where possible.
- pddl-tree-messages: Adding predicate user access functions to problem expert client.
- pddl-tree-messages: Adding predicate user access functions to problem expert client.
- pddl-tree-messages: Applying ament uncrustify.
- pddl-tree-messages: Updating addInstance and removeInstance calls to use helper classes.
- pddl-tree-messages: Reverting change to log statement severity.
- pddl-tree-messages: Removing a couple unnecessary includes.
- pddl-tree-messages: Merging master and resolving conflicts.
- action-timeout-clean: Renaming test behavior tree.
- Using custom behavior tree to enable action timeouts.
- pddl-tree-messages: Merging upstream master and resolving conflicts.
- pddl-tree-messages: Using ROS messages to define the PDDL construct trees.
- Adding action execution status (as color changes) to the plan dotgraph. Adding legend to plan dotgraph, adding node params for dotgraph legend and printing plan graph to terminal.
- Fix tests and linting
- linting
- Configurable action BT
- Configurable BT Action
- Reducing log message severity because lack of a plan isn't necessarily an error.
- Reduce debug output
- Plansys2_tests package
- Adding unit test for getOrderedSubGoals.
- Add GetOrderedSubGoals service to Executor, allowing executor clients to get the order in which sub-goals will be completed by the current plan.
- Update version
- Contributors: Alexander Xydes, Francisco Martín Rico, Greg Kogut, Josh Zapf
1.0.9 (2021-03-15)
- Disable boost in tests
* Contributors: Francisco Martín Rico 1.0.8 (2021-03-12) ------------------* Change default ZMQ ports * Removing whitespace. * Simplified logic. * Update API for FutureReturnCode * Handling edge cases of action failure and preventing overriding completion percentage on action completion. * Publishing generated plan as a dotgraph on a string topic. * Fix BT creation; parallel deps actions * Fixing feedback control * Action execution refactoring * Moving Utils file to plansys2_problem_expert since all the functions are checking information in the problem or modifying the problem. * utils-bug: Fixing bug in OR case of evaluate function in plansys2_executor/Utils.cpp. * Making zmq error message more generic to reflect that there are multiple possible reasons for a BT::LogicError to be thrown. * Add support to plansys2_executor/ExecutorNode for visualizing the behavior trees in Groot. * Moving publisher on_activate call to the ExecutorNode::on_activate callback. * Add support for numeric conditions and effects. * Monitorization info * Remove an unreshable return * Adding actor checker in terminal * Improving BTActions * Fix repeated nodes * New Graph creation Algorithm * Debugging * Added negative predicates support * Namespaced action_hub * Contributors: Alexander Xydes, Fabrice Larribe, Francisco Martin Rico, Greg Kogut, Josh Zapf
1.0.7 (2021-01-04)
- Making explicit dependencies
* Contributors: Francisco Martín Rico 1.0.6 (2020-12-29) ------------------* Disable boost functions * Contributors: Francisco Martín Rico 1.0.5 (2020-12-28) ------------------* Migration to c++17 * Contributors: Francisco Martín Rico
1.0.4 (2020-12-24)
1.0.3 (2020-12-23)
1.0.2 (2020-12-23)
- Plan solvers as plugins
- Contributors: Fabrice Larribe, Francisco Martin Rico, f269858
1.0.1 (2020-07-19)
1.0.0 (2020-07-19)
- Foxy initial version
- Boost:optional
- Support for BT actions
- Contributors: Francisco Martin Rico
0.0.8 (2020-07-18)
- Add BT support
- Contributors: Francisco Martin Rico
0.0.7 (2020-03-26)
- ActionExecutorClient is cascade_lifecycle Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>>
- Contributors: Francisco Martin Rico
0.0.6 (2020-03-23)
- Run in separate namespaces. Monolothic node Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>>
- Contributors: Francisco Martin Rico
0.0.5 (2020-01-12)
0.0.4 (2020-01-09)
- Adding missing action dependencies Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>>
* Contributors: Francisco Martín Rico 0.0.3 (2020-01-09) ------------------* Add popf dependency Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Contributors: Francisco Martín Rico 0.0.2 (2020-01-08) ------------------* Merge pull request #16 from IntelligentRoboticsLabs/pddl_parser_rename Rename pddl_parser * Rename pddl_parser Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Merge pull request #15 from IntelligentRoboticsLabs/example_rename Rename example. Small bug in timeouts * Linting Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Rename example. Small bug in timeouts Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Merge pull request #12 from IntelligentRoboticsLabs/actions_composition Define rate dynamically * Define rate dynamically Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Packages.xml description Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Adding documentation Signed-off-by: Francisco Martin Rico <<fmartin@gsyc.urjc.es>> * Setting CI Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Setting CI Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Setting CI Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Setting CI Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * onActivate and onFinished methods for Action Clients Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * First functional version complete Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Execute actions independiently. Example Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Change to lowercasegit Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Executor initial version Signed-off-by: Francisco Martin Rico <<fmrico@gmail.com>> * Contributors: Francisco Martin Rico
Wiki Tutorials
Package Dependencies
System Dependencies
| Name |
|---|
| libzmq3-dev |