
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti

![]()
![]()
![]()
![]()


BehaviorTree.CPP
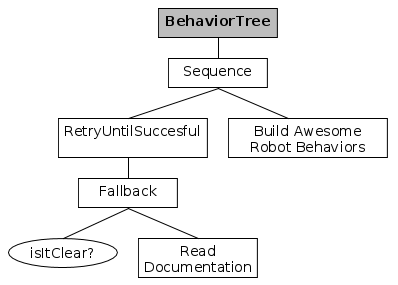
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
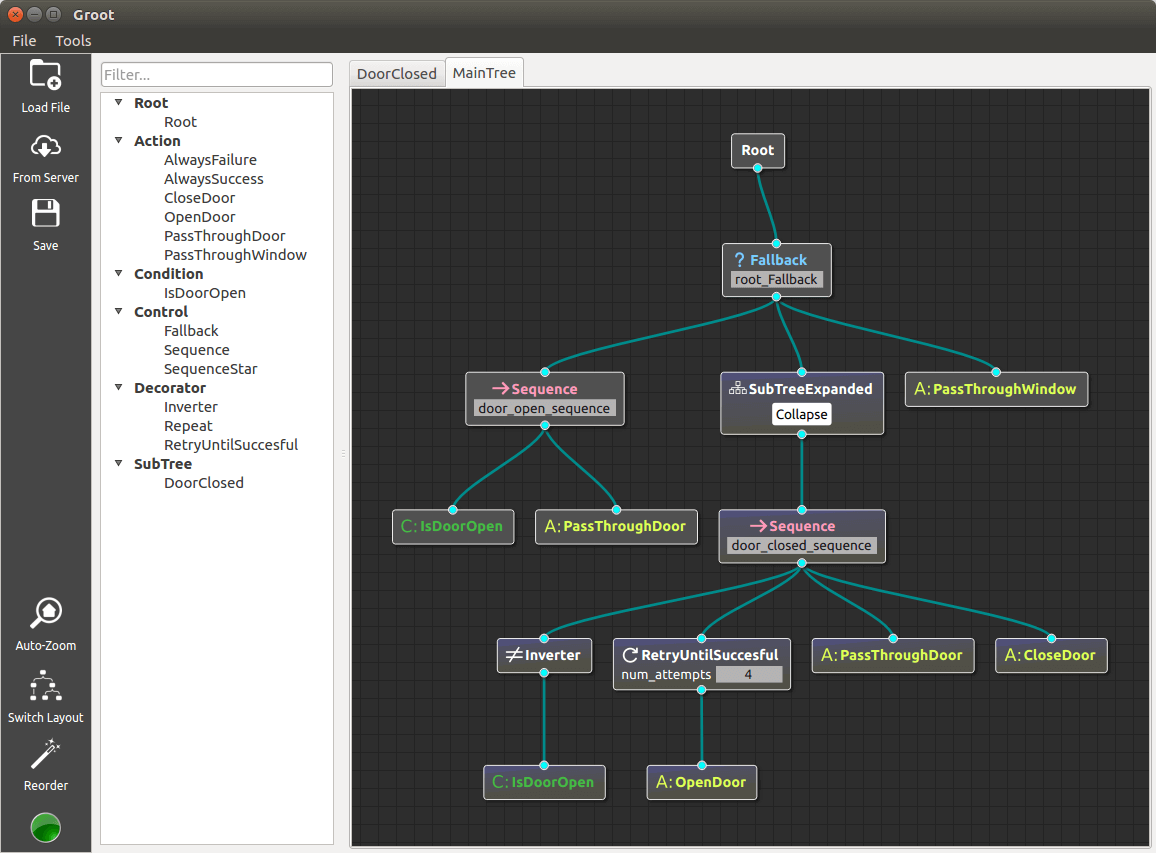
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
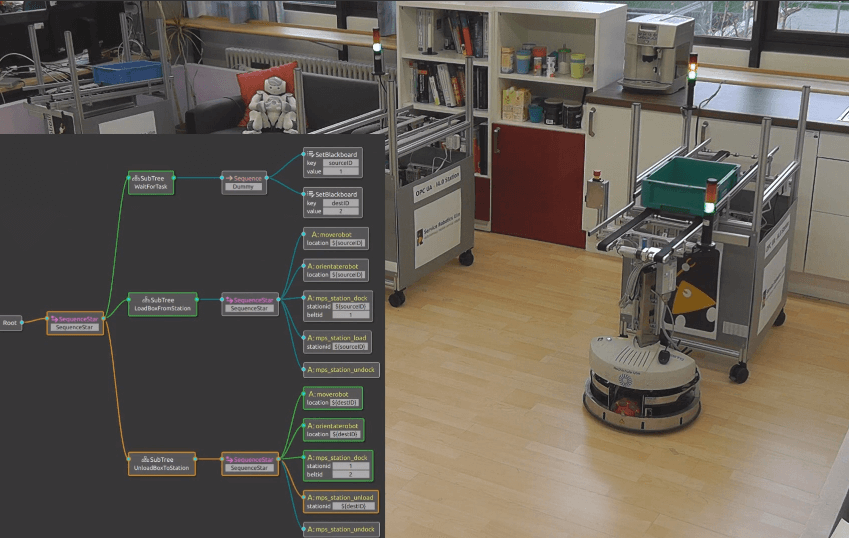
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged behaviortree_cpp_v3 at Robotics Stack Exchange
|
|
behaviortree_cpp_v3 package from behaviortree_cpp_v3 repobehaviortree_cpp_v3 |
ROS Distro
|
Package Summary
| Version | 3.8.7 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/BehaviorTree/BehaviorTree.CPP.git |
| VCS Type | git |
| VCS Version | v3.8 |
| Last Updated | 2024-06-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Davide Faconti
Authors
- Michele Colledanchise
- Davide Faconti
![]()
![]()
![]()
![]()
BehaviorTree.CPP
This C++ 14 library provides a framework to create BehaviorTrees. It was designed to be flexible, easy to use, reactive and fast.
Even if our main use-case is robotics, you can use this library to build AI for games, or to replace Finite State Machines in your application.
There are few features that make BehaviorTree.CPP unique, when compared to other implementations:
-
It makes asynchronous Actions, i.e. non-blocking, a first-class citizen.
-
You can build reactive behaviors that execute multiple Actions concurrently.
-
Trees are defined using a Domain Specific Scripting scripting language (based on XML), and can be loaded at run-time; in other words, even if written in C++, Trees are not hard-coded.
-
You can statically link your custom TreeNodes or convert them into plugins which can be loaded at run-time.
-
It provides a type-safe and flexible mechanism to do Dataflow between Nodes of the Tree.
-
It includes a logging/profiling infrastructure that allows the user to visualize, record, replay and analyze state transitions.
-
Last but not least: it is well documented!
Documentation
You can learn about the main concepts, the API and the tutorials here: https://www.behaviortree.dev/
To find more details about the conceptual ideas that make this implementation different from others, you can read the final deliverable of the project MOOD2Be.
Forum and Community
If the documentation doesn’t answer your questions and/or you want to connect with the other BT.CPP users, visit https://discourse.behaviortree.dev/
Commercial support
Are you using BT.CPP in your commercial product and you need technical support / consulting? You can get in touch at dfaconti@aurynrobotics.com and we will happy to discuss your use case and needs.
Design principles
The main goal of this project is to create a Behavior Tree implementation that uses the principles of Model Driven Development to separate the role of the Component Developer from the Behavior Designer.
In practice, this means that:
-
Custom TreeNodes must be reusable building blocks. You should be able to implement them once and reuse them to build many behaviors.
-
To build a Behavior Tree out of TreeNodes, the Behavior Designer must not need to read nor modify the C++ source code of a given TreeNode.
-
Complex Behaviours must be composable using Subtrees
Many of the features and, sometimes, the apparent limitations of this library, might be a consequence of this design principle.
For instance, having a scoped BlackBoard, visible only in a portion of the tree, is particularly important to avoid “name pollution” and allow the creation of large scale trees.
GUI Editor
Editing a BehaviorTree is as simple as editing a XML file in your favourite text editor.
If you are looking for a more fancy graphical user interface (and I know you do) check Groot out.
Watch Groot and BehaviorTree.CPP in action
Click on the following image to see a short video of how the C++ library and the graphic user interface are used to design and monitor a Behavior Tree.
How to compile (plain old cmake)
On Ubuntu, you are encourage to install the following dependencies:
sudo apt-get install libzmq3-dev libboost-dev
Other dependencies are already included in the 3rdparty folder.
File truncated at 100 lines see the full file
Changelog for package behaviortree_cpp
3.8.7 (2024-06-26)
-
Backport of some build-related flatbuffers changes (#825)
* From flatbuffers upstream: Fix compiler error Original author of change: avaliente-bc Backport/update from upstream flatbuffers repository. Change taken from https://github.com/google/flatbuffers/pull/7227
* From flatbuffers upstream: Fix include of string_view with C++17 abseil Original author of change: ocpalo Backport/update from upstream flatbuffers repository. Changes taken from https://github.com/google/flatbuffers/pull/7897.
-
Add in call to ament_export_targets. (#826) That way downstream ament packages can use this package as a CMake target.
-
Fixed #810 - halting of subsequent nodes in ReactiveSequence/Fallback (#817)
- ReactiveSequence and ReactiveFallback will behave more similarly to 3.8
* Reactive Sequence/Fallback defaulting to allow multiple async nodes ---------Co-authored-by: Davide Faconti <<davide.faconti@gmail.com>> Co-authored-by: Matej Vargovcik <<vargovcik@robotechvision.com>>
-
Merge pull request #769 from bi0ha2ard/fewer_boost_dependencies depend only on libboost-coroutine(-dev) for v3.8
-
fix(dependency): depend only on libboost-coroutine(-dev) At least on Ubuntu, boost-all-dev depends on openmpi, which depends on a fortran compiler and gcc. This is very heavy for Docker containers where only exec dependencies are really needed.
-
alternative to #719
-
- fix issue
- #725
- SetBlackboard can copy entries
- Contributors: Chris Lalancette, Davide Faconti, Felix, Lars Toenning, afrixs
3.8.5 (2023-08-14)
3.8.4 (2023-06-28)
- Update ros2.yaml
- Update ros1.yaml
- Issue 563
(#596)
- failing test
- fix issue 563 (?)
- better solution
- use lambda in tutorial
- Merge pull request #583 from BehaviorTree/issue563 Issue563
- better default port
- restore type check
- fix issue #563
- fix test
- Issue563
- Merge pull request #579 from open-navigation/hi changing resetStatus to public
- Update tree_node.h
- changing resetStatus to public
- Merge branch 'v3.8' of github.com:BehaviorTree/BehaviorTree.CPP into v3.8
- backporting fixes from branch 4.x
- Merge pull request #546 from divbyzerofordummies/fix_ROS_include Fix issue #545
- Fix issue #545
- bug fix: halting a Node must invoke the Loggers
- unit test added
- Contributors: Daniel Muschick, Davide Faconti, Steve Macenski, stevemacenski
3.8.3 (2023-03-01)
- fix and warnings added
- fix in SharedLibrary and cosmetic changes to the code
- Contributors: Davide Faconti
File truncated at 100 lines see the full file