
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
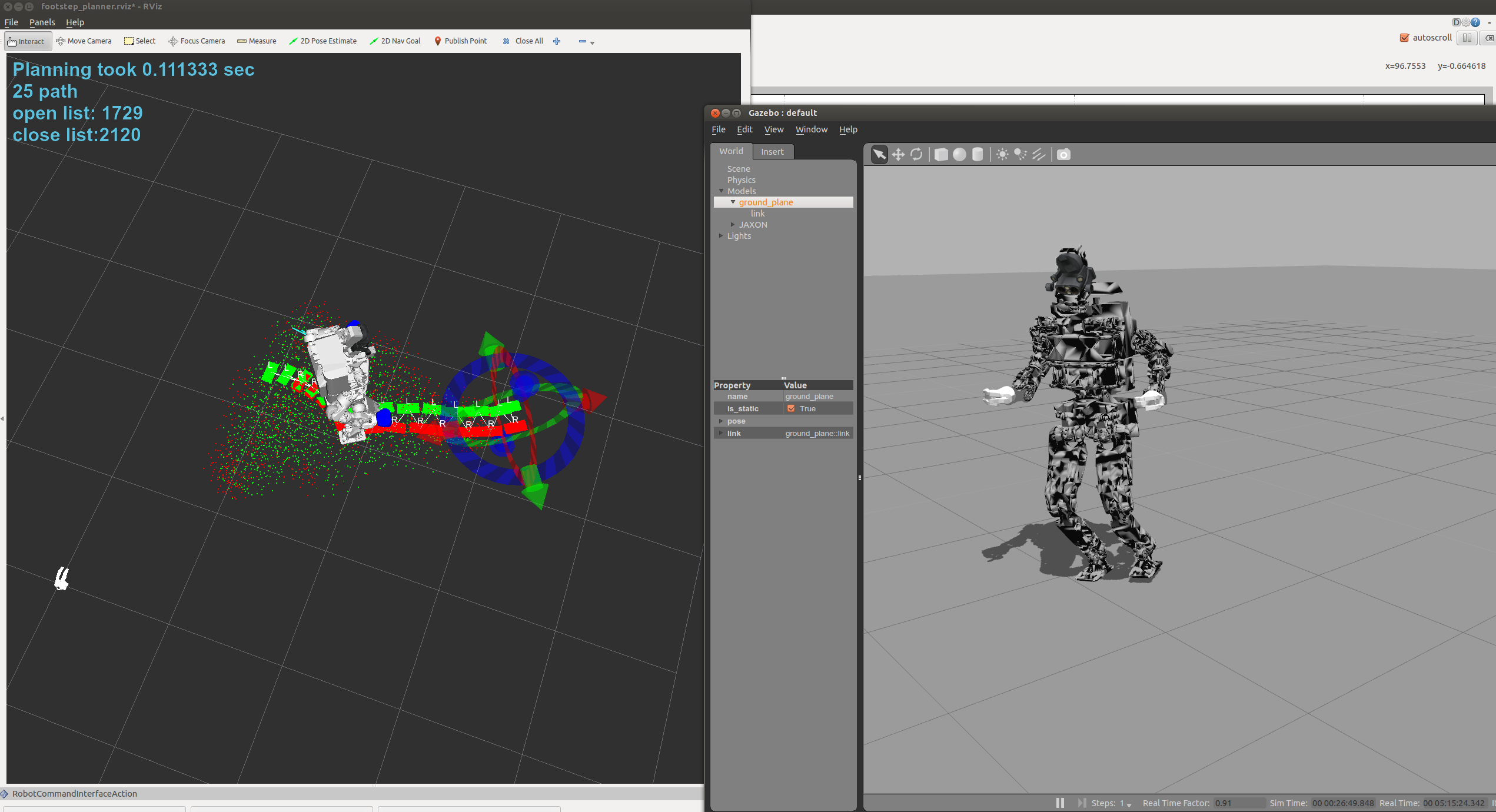
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
- [footstep_planner] add local move offset
- [footstep_planner] remove debug message / fix for very short path
- [footstep_planner] add PathCost and Successor function
- [jsk_footstep_planner] add project_footstep service
- [jsk_footstep_planner/config/*footstep_planner_params.yaml] Update HRP2JSKNT, HRP2JSKNTS footstep planner params and add parameter for JAXON.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test] Increase test time to 5 minutes.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.l] Add test for slope and stair
- [jsk_footstep_planner/config/sample_robot_footstep_planner_params.yaml] Update parameters for stair slope test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Dump goal pos rot thre and transition limit
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Use analysis-level coords while IK.
- [footstep_planner] add check collision when validating goal state
- [footstep_planner] add offset for successor test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add euslisp code to generate eus sample robot footstep planner params
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test,.l, config/sample_robot_footstep_planner_params.yaml] Add test for footstep successors and add config parameter for euslisp sample robot. Make default tested robot as sample robot.
- [jsk_footstep_planner/CMakeLists.txt,package.xml] Add footstep planner rostest. roseus dependency is required for message generation.
- [footstep_planner] add check collision when finalizing
- [jsk_footstep_planner/footstep_plnner.cpp] add ROS_INFO for read successors
- Migrate srv files from jsk_pcl_ros to jsk_recognition_msgs see
- [jsk_footstep_planner/footstep_plnner.cpp] fix successor processing using [r/l]leg_offset
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add generator for some footstep planner parameters using robot model
- [jsk_footstep_planner/config/HRP2JSKNT*_footstep_planner_params.yaml] Add hrp2 footstep planner settings.
- [jsk_footstep_planner/config/JAXON_RED_footstep_planner_params.yaml, launch/cppplanner/optimistic_footstep_planner.launch] Move some footstep parameters to parameter files.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch, README, euslisp/footstep-planner-client-sample.l, test/test_footstep_planning_eus_client.test] Use argument ROBOT instead of env ROBOT
- [jsk_footstep_planner/test] Add simple test for footstep_planner
- [jsk_footstep_planner/src/footstep_graph.cpp] isColliding returns false if use obstacle model is true and no obstacles are specified (point cloud size = 0).
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch] Check arg for USE_PERCEPTION for use_lazy_perception
- [jsk_footstep_planner/launch/cppplanner/footstep_planner.rviz,optimistic_footstep_planner.launch] Enable use_obstacle_model and display obstacle model as point cloud.
- [jsk_footstep_planner] update sample (footstep-planner-client-sample.l)
- [heightmap.launch] use jsk_pcl_ros heightmap_converter.launch
- Stop using deprecated jsk_topic_tools/log_utils.h see
- [footstep_planner/footstep_marker] fix offset between end-coords and center of cube
- [jsk_footstep_planner] update launch for JAXON_RED
- [jsk_footstep_planner] Add plane_projection params for footstep_marker
- [jsk_footstep_planner] plane detection should be executed in fixed frame
- [jsk_footstep_planner] enable plane_projection option only when use_footstep_plane_detection is true
- [jsk_footstep_planner] Add launch files for footstep plane detection
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_planner] Use floor_detection to compensate initial z height errors caused by abc odom
- [jsk_footstep_planner] fix bug in FootstepStateDiscreteCloseList, range violation of volume_key
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_planner] Set use_go_pos_server arg true as default
- Add go_pos_server launch option to JAXON_RED footstep laucnh file
- [jsk_footstep_planner] Add rviz launch option to footstep launch file for JAXON_RED
- [jsk_footstep_planner] Add services to wait footstep execution and planning
- [jsk_footstep_planner] Fix transformation in pose stamped command (this transformation should be written by tf2, ideally)
- [jsk_footstep_planner] Set padding options to remove unnecessary points around a robot
- [footstep_planner] add support_padding_x,y
- [footstep_planner] use FootstepParameter for passing parameters
- [footstep_planner] add footstep_parameters.h
- [jsk_footstep_planner] fix parameter names
- [JAXON_RED] add more parameters to JAXON_RED_footstep_planner_perception.launch
- [jsk_footstep_planner] add planning_timeout parameter
- [jsk_footstep_planner] fix local_move and lazy_perception
- [footstep_marker] fix foot coordinates for rotated pose
- [JAXON] adjust parameters for footstep
- [footstep_planner] add parameter default_rfoot_to_lfoot_offset
- use normal for validating footsteps
- Merge remote-tracking branch 'origin/master' into fix_foot_center
- fix center position of footstep
- [jsk_footstep_planner] Add service to toggle planning mode
- [jsk_footstep_planner] Check actionlib server connection before sending goal in execute footstep callback
- [jsk_footstep_planner] Do not reset last footstep to connect next footstep plan result correctly in resetMarkerCB
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_planner] Add simple footstep correction scripts
- [jsk_footstep_planner] Add joy_footstep_marker launch, which control footstep_marker from joystick controller
- [jsk_footstep_planner] Add viewer for footstep_planner of JAXON
- [jsk_footstep_planner] Set skip_cropping option true as default
- [jsk_footstep_planner] Add skip_cropping option to toggle whether enabling cropping in pointcloud support check
- [jsk_footstep_planner] Add footstep_planner sample launch for JAXON_RED
- [jsk_footstep_planner] waitForResult in executeFootstepCB and check result status in service callback
- [jsk_footstep_planner] Add get_footstep_marker_pose service to footstep_marker
- [jsk_footstep_planner] Add reset_marker and execute_footstep service to footstep_marker
- Contributors: Iori Kumagai, Kentaro Wada, Shunichi Nozawa, Yohei Kakiuchi
0.1.9 (2016-03-23)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- [jsk_footstep_planner] Add command_pose_stampped to footstep_marker
- [jsk_footstep_planner] Add bbox visalization and check goal status sanity before planning
- [jsk_footstep_planner] Remove points around the robot from robot_center_pointcloud before combine with robot_center_map_origin_points
- [jsk_footstep_planner] Support projection from marker Modified:
- jsk_footstep_planner/include/jsk_footstep_planner/footstep_marker.h
- jsk_footstep_planner/src/footstep_marker.cpp
- Merge pull request #562 from garaemon/collision-avoidance [jsk_footstep_planner] Support collision avoidance in footstep planner
- [jsk_footstep_planner] Support collision check
- [jsk_footstep_planner] Not use im_helpers::add3Dof2DControl for backward compatibility
- [jsk_footstep_marker] Move footstep_marker from jsk_interactive_marker
- [jsk_footstep_planner] Fix genjava problem with
message_generation as build_depend Modified:
- jsk_footstep_planner/package.xml
- [jsk_footstep_planner] Only consider forward step stride in
heuristic estimation Modified:
- jsk_footstep_planner/src/footstep_graph.cpp
- [jsk_footstep_planner] Do not check pointcloud if no perception
mode Modified:
- jsk_footstep_planner/src/footstep_planner.cpp
- [jsk_footstep_controller] Merge heightmap nodelets into multisense_laser nodelet to reduce tf related nodes
- [jsk_footstep_planner] Add successors definitions for jaxon, jaxon_red and hrp2jsknt
- Update .travis to jsk-travis 0.2.1 and enable ccache
- {jsk_calibration, jsk_footstep_planner}/README.md: fix section/subsection
- [jsk_footstep_planner] Measure perception duration in collaborative perception-planning scheduling
- [jsk_footstep_planner] Fix skip_cropping=true behavior
- [jsk_footstep_planner] Remove literal value from benchmark code
- [jsk_footstep_planner] Remove ROBOT env from sample launch files
- Contributors: Kei Okada, Kentaro Wada, Ryohei Ueda, Iori Kumagai
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_footstep_planner] Add &allow-other-keys to fullbody-inverse-kinematics-with-standcoords. You can add :collision-check-robot-link-list and so on
- add variables to modify bounding box height
- [jsk_footstep_planner:footplace_sample]add sample file for footplace_manip
- [jsk_footstep_planner:footplace..]merge origin/master
- [jsk_footstep_planner:footplace~] debug output like normak ik
- fix minor bug in fullbody-inverse-kinematics-with-standcoords
- add args for ik with standcoords
- [jsk_footstep_planner] Ignore Z distance in heuristic computation
- Merge pull request #488 from garaemon/remove-global-variable [jsk_footstep_planner] Remove global variable from footplace planning
- [jsk_footstep_planner] Fix indent of footplace_planner_for_manipulation.l
- [jsk_footstep_planner] Remove global variable from footplace planning
- change name of inverse-reachablity code
- add foot placement coords with ik
- [jsk_footstep_planner] Add script to convert jsk_footstep_msgs/FootstepArray to jsk_recognition_msgs/BoundingBox
- [jsk_footstep_controller] Update footstep planner parameter for hrp2
- [jsk_footstep_planner] Verify global location of footstep in projecting start and goal footstep
- [jsk_footstep_planner] Add global transition limit to verify global location of footstep
- [jsk_footstep_planner/simple_neighbored_graph.h] add missing include string
- change static polygon param
- [jsk_footstep_planner] Do not use jsk_pcl_ros, use jsk_recognition_utils instead of it. These commits are forgotten in previous commit.
- [jsk_footstep_planner] Use jsk_recognition_utils instead of jsk_pcl_ros
- [jsk_footstep_planner] Update stair model to more difficult one
- [jsk_pcl_ros] Fix handling of --enable_lazy_perception and --enable_local_movement options and printout graph info
- [jsk_footstep_planner] Add infoString method to print footstep graph property
- [jsk_pcl_ros] Do not raise exception when cvs has lack data
- [jsk_footstep_planner] Add simple launch file to preview models for benchmarking
- [jsk_footstep_planner] Add --only-save-image option to plotting script
- [jsk_footstep_planner] Add --verbose option to bench_footstep_planner.cpp
- [jsk_footstep_planner] Save to eps figure when visualizing benchmark plot
- [jsk_footstep_planner] build pointcloud model in more wider area
- [jsk_footstep_planner] Check ANNGridCell is already allocated
- [jsk_footstep_planner/bench_footstep_planner] Project start and goal footstep before taking benchmark
- [jsk_footstep_planner] Add anonymous flag to ros::init in benchmark program
- [jsk_footstep_planner] Add several args to disable perception and run planner with hrpsys/gazebo
- [jsk_footstep_planner] Add start-abc button for planner gui using with simulator
- [jsk_footstep_planner] Update benchmark program to specify a lot of parameters
- [jsk_footstep_controller, jsk_teleop_joy] Use footstep-controller.l and lock/unlock furutaractive model during exeucuting footsteps
- [jsk_footstep_planner] Fix indent
- [jsk_footstep_planner] Fix typo: crpping -> cropping
- [jsk_footstep_planner, controller] Add rviz GUI set for playing with footstep planner
- [jsk_footstep_planner] Use odom_init frame to publish plane for unseen region
- [jsk_footstep_controller/footcoords] Add odom_init frame which holds the pose when robot is put on the ground
- [jsk_footstep_planner] Add gaussian pointcloud to pointcloud generator
- Merge pull request #414 from garaemon/default-body-on-odom [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Print error message about projection on rviz
- [jsk_footstep_controller] Add simple-footstep-controller as the most simplest footstep controller using :set-foot-steps
- [jsk_footstep_planner] Check pointcloud is available before projection
- [jsk_footstep_planner] Cleanup heightmap launch files
- Merge remote-tracking branch 'refs/remotes/origin/master' into crosscheck
- [jsk_footstep_planner] Implement cross check
- [jsk_footstep_planner] Add launch file to run footstep planner with heightmap integration
- [jsk_footstep_planner] Add text information on rviz
- [jsk_footstep_planner] Ignore warning message from pcl
- [jsk_footstep_planner] Fix projection around yaw axis orientation
- [jsk_footstep_planner] Add launch file for heightmap mapping
- Merge remote-tracking branch 'refs/remotes/origin/master' into hole-rate Conflicts: jsk_footstep_planner/src/pointcloud_model_generator.cpp
- [jsk_footstep_planner] Add ~hole_rate to simulate hole in pointcloud
- [jsk_footstep_planner] Publish pointcloud periodically from pointcloud_model_generator_node
- [jsk_footstep_planner] Just use kdtree nearest search in checking if footstep is on pointcloud
- [jsk_footstep_planner] add cost_weight and heuristic_weight parameter
- [jsk_footstep_planner] Update pointcloud to show close list and open list during planning
- [jsk_footstep_planner] Check value of transition when expanding nodes
- [jsk_footstep_planner] Use center of footprint to check if footprint is on pointcloud
- [jsk_footstep_planner] Project footprint with local search
- [jsk_footstep_planner] Add projection API to c++ footstep planner
- [jsk_footstep_planner] Add more parmeters to dynamic_reconfigure API of cpp footstep_planner
- [jsk_footstep_planner] Add perception sample with actionlib interface
- [jsk_footstep_planner] Add actionlib interface to C++ version of footstep planner. and add simplest smaple
- [jsk_footstep_planning] Visualize open and close list as pointcloud
- [jsk_footstep_planner] Fix ANNGrid search
- [jsk_footstep_planner] Skip planar region perception if footstep is already on pointcloud
- [jsk_footstep_planner] PointCloud approximate search based on 2-D grid
- [jsk_footstep_planner] Implement local movement if footstep is close to success of projection to pointcloud
- [jsk_footstep_planner] Check pointcloud model supports footprint
- [jsk_footstep_planner] Do not use SVD in perception
- [jsk_footstep_planner] Re-implement footstepHeuristicStepCost in
computationally-efficient way.
- Do not use Eigen::Affine3f::rotation because it calls SVD internally.
2. Do not cast to Eigen::AngleAxisf, just use cos(w/2) to compute angle from quaternion.
- [jsk_footstep_planner] Add profile function interface
- [jsk_footstep_planner] Add script to plot bench result
- [jsk_footstep_planning] Add program to bench footstep planning speed
- [jsk_footstep_planner] Add demonstration of footstep planning over curved and sloped surface
- [jsk_footstep_planner] Fix orientation of projected footstep
- [jsk_footstep_planner] Add timeout argument to solver
- [jsk_footstep_planner] Fix when footstep failed to project on planar region
-
[jsk_footstep_planner] Planning with pointcloud model is implemented. We optimized perception phase by lazy-perception-in-planning technique: 1) Do not detect planar region before planning
2) Do not detect planar region until accurate pose of footstep is required 3) use 2.5D pointcloud to get candidate pointcloud which footstep is placed on
- [jsk_footstep_planner] Add demo for curved surface
- [jsk_footstep_planner] Interactive demo of C++ footstep planner
- [jsk_footstep_planner] Use FootstepStateDiscreteCloseList for close list
- [jsk_footstep_planner] 2D footstep planning is implemented in C++
- [jsk_footstep_planner] Implement FootstepState and projection to pointcloud
- [jsk_footstep_planner] Add demo directory and install headers and library
- [jsk_footstep_planner] Implement C++ a* solver
- [jsk_footstep_planner] Initial commit of cpp graph library
- [jsk_footstep_planner] Update jaxon_red footprint region
- [jsk_footstep_planner, jsk_footstep_controller] Support HRP2JSKNT
- [jsk_footstep_planner, jsk_footstep_controller] Add USE_JOY option
- [jsk_footstep_planner, jsk_footstep_controller] Refactor launch file and add no_recog.launch
- [jsk_footstep_planner] Rename launch file to use ROBOT environment variable
- Contributors: Masaki Murooka, Ryohei Ueda, Yu Ohara, Yuki Furuta, Yusuke Oshiro
0.1.6 (2015-06-11)
- [jsk_footstep_planner] Enable roll paranoid mode
- Merge pull request #327 from garaemon/set-heuristic [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_controller] Fix parameters for jaxon red
- [jsk_footstep_planner] Fix for terrain task
- [jsk_footstep_planner] Add topic interface to project footprint
- [jsk_footstep_planner] Support JAXON_RED
- [jsk_footstep_planner, jsk_footstep_controller] Update for las vegas terrain with jaxon
- [jsk_footstep_planner] Enable roll paranoid mode again
- [jsk_footstep_planner, jsk_footstep_controller] Update for jaxon terrain
- [jsk_footstep_planner] Add simple script to transform frame_id of jsk_footstep_msgs/FootstepArray
- [jsk_footstep_controller] Change gait generator parameters according to plane condition including pitch angle and taking into account if transition is upward or downward
- [jsk_footstep_planner, jsk_footstep_controller] Compute x and y from previous coordinates to detect rolled plane
- [jsk_footstep_planner, jsk_footstep_controller] Support rolling terrain, I hope
- [jsk_footstep_planner, jsk_footstep_controller] Fix typo and update parameter for terrain
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon parameter files
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon footstep planning, Do not merge yet
- [jsk_footstep_planner] locally search reasonable goal when snapping
- [jsk_footstep_planner] Update offset parameter
- [jsk_footstep_planner] Support offset parameter from end coords to center of foot polygon
- [jsk_footstep_planner] Optimize function to remove shadow cells by using local coordinates
- [jsk_footstep_planner] Update projection parameter for slope terrain
- [jsk_footstep_planner] Add ~remove_shadow_cells to add padding to shadow cells
-
[jsk_footstep_planner] Improve planning for different levels: 1. Move successors a little bit when projecting footprint to different level 2. Use footstep coordinate rather than mid-coords of the footstep as goal coordinates
- [jsk_footstep_planner] Check transition limit when planning across diffrent levels
- [jsk_footstep_planner] Add gui-debug symbol and ~toggle_gui_debug service to toggle debug using gui
- [jsk_footstep_planner] Add service API to project pose onto the nearest grid
- [jsk_footstep_planner] More greedy heuristic and compile euslisp code correctly
- [jsk_footstep_planner] Separate successors for same level and transition across different level
- [jsk_footstep_planner] Update successors' parameters
- [jsk_footstep_planner] Check range of grids first in occupancy-grid
- [jsk_footstep_planner] Use glVertexPointer and glDrawArrays to draw occupancy-grid
- [jsk_footstep_planner] Optimize creation of occupancy-grid by using integer-vector rather than hash-table
- [jsk_footstep_planner] Fix bug to compute rotate footstep to snap onto planes
- [jsk_footstep_planner] Update successors parameter
- [jsk_footstep_planner] add geo package to quaternion-from-two-vectors
- [jsk_footstep_planner] Read footstep parameter from file rather than ros parameter
- [jsk_footstep_planner] Use quaternion-from-two-vectors to compute rotate in project-coords-on-to-plane
- [jsk_footstep_planner] Add method to generate occupancy-grid from face
- [jsk_footstep_planner] Use mtimer instead of ros::time-now
- [jsk_footstep_planner] Fix minor bugs
- [jsk_footstep_planner] Memoize projecting grid and re-use it when the planner checks the plane is placable and refactor function names
- [jsk_footstep_planner] Optimize hash size according to cell num
- [jsk_footstep_planner] A lot of improvements on planner
- Fix about orientation of projected footstep
- Lazy evaluation to check if footprint is able to be on grid
- Use mid-coords of footprints to evaluate heuristic
- [jsk_footstep_planner] Do not check if the footstep can be placable on plane across planes
- [jsk_footstep_planner] Support SimpleOccupancyGrid in footstep planner
- [jsk_footstep_planner] Snap geometry_msgs::PoseStamped (from rviz) onto grid map
- [jsk_footstep_planner] Move more functions to footstep_planner_utill.l from footstep_planner.l
- [jsk_footstep_planner] Support color in occupancy-grid class
- [jsk_footstep_planner] Return vertices in global coordinates in :vertices method of occupancy-grid
- [jsk_footstep_planner] Euslisp binding of jsk_recognition_msgs::SimpleOccupancyGrid message
- [jsk_footstep_planner] separate standalone utility functions into footstep_planner_util.l
- [jsk_footstep_planner] Add publisher of polygon of footprint for HRP2JSK
- [jsk_footstep_planner] Add euslisp wrapper to snap footstep on planes
- [jsk_footstep_plannar] Resolve pose of footstep respacted to initial footstep
- [jsk_footstep_plannner] Visualize euslisp footstep on rviz
- [jsk_footstep_planner] Use jsk_recognition_msgs
- Contributors: Ryohei Ueda, Yu Ohara
0.1.5 (2015-01-08)
- renamed make_sumple function
- added make-coords-list function
- added inverse_reachablity_with_given_coords
- Update drcmodel for current planner
- Add sample to compare heuristic functions
- add api to change successor
- Merge remote-tracking branch 'origin/master' into add-breakpoint-text Conflicts: jsk_footstep_controller/euslisp/footstep-controller.l jsk_footstep_controller/launch/hrp2jsknt_real_full.launch
- Add text publishing when checking breakpoint
- Do not allow step over 250mm stride
- Supress x-transition after z-transition. All the threshold is hard-coded
- Update footstep parameter for climing up stairs: larger footstep and smaller footprint
- Add dimensions of footsteps to the result of footstep planner
- Visualize footstep successors
- roseus only needs runtime
- Contributors: Kei Okada, Ryohei Ueda, Yu Ohara
0.1.4 (2014-10-21)
0.1.3 (2014-10-10)
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use lock/unlock service of environment server to lock/unlock the environment during planning
- compile euslisp file before running footstep planner
- publish footstep for visualization from planner
- update usage of env server according to the latest changeset of jsk_recognition
- use env server of jsk_pcl_ros
- ignore emtpy polygon message
- prepend initial steps to the result of the footstep planning
- call x::window-main-onw only if debug is t in jsk_footstep_planner/footstep-planner-node.l
- support 6dof planning
- adding model for footstep planning
- finalize footstep by goal steps
- supporting slope in footstep planning
- update for slope planning
- begins to support slope
- automatically choose the goal footstep
- store goal footstep to the problem class
- supress debug message of footstep planner
- update python scripts for catkin
- load msgs directory
- fix dependency
- keep permission of euslisp codes
- catkinize jsk_footstep_planner
- fix to keep orientation after projection to the planes
- supporting z-direction movement in planning
- supporting timeout of planning
- adding jsk_footstep_planner, euslisp implementation
- Contributors: Ryohei Ueda, Masaki Murooka
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_successors_visualization.launch
- launch/eusplanner/example.launch
- launch/eusplanner/footstep_successors_visualization.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
- [footstep_planner] add local move offset
- [footstep_planner] remove debug message / fix for very short path
- [footstep_planner] add PathCost and Successor function
- [jsk_footstep_planner] add project_footstep service
- [jsk_footstep_planner/config/*footstep_planner_params.yaml] Update HRP2JSKNT, HRP2JSKNTS footstep planner params and add parameter for JAXON.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test] Increase test time to 5 minutes.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.l] Add test for slope and stair
- [jsk_footstep_planner/config/sample_robot_footstep_planner_params.yaml] Update parameters for stair slope test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Dump goal pos rot thre and transition limit
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Use analysis-level coords while IK.
- [footstep_planner] add check collision when validating goal state
- [footstep_planner] add offset for successor test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add euslisp code to generate eus sample robot footstep planner params
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test,.l, config/sample_robot_footstep_planner_params.yaml] Add test for footstep successors and add config parameter for euslisp sample robot. Make default tested robot as sample robot.
- [jsk_footstep_planner/CMakeLists.txt,package.xml] Add footstep planner rostest. roseus dependency is required for message generation.
- [footstep_planner] add check collision when finalizing
- [jsk_footstep_planner/footstep_plnner.cpp] add ROS_INFO for read successors
- Migrate srv files from jsk_pcl_ros to jsk_recognition_msgs see
- [jsk_footstep_planner/footstep_plnner.cpp] fix successor processing using [r/l]leg_offset
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add generator for some footstep planner parameters using robot model
- [jsk_footstep_planner/config/HRP2JSKNT*_footstep_planner_params.yaml] Add hrp2 footstep planner settings.
- [jsk_footstep_planner/config/JAXON_RED_footstep_planner_params.yaml, launch/cppplanner/optimistic_footstep_planner.launch] Move some footstep parameters to parameter files.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch, README, euslisp/footstep-planner-client-sample.l, test/test_footstep_planning_eus_client.test] Use argument ROBOT instead of env ROBOT
- [jsk_footstep_planner/test] Add simple test for footstep_planner
- [jsk_footstep_planner/src/footstep_graph.cpp] isColliding returns false if use obstacle model is true and no obstacles are specified (point cloud size = 0).
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch] Check arg for USE_PERCEPTION for use_lazy_perception
- [jsk_footstep_planner/launch/cppplanner/footstep_planner.rviz,optimistic_footstep_planner.launch] Enable use_obstacle_model and display obstacle model as point cloud.
- [jsk_footstep_planner] update sample (footstep-planner-client-sample.l)
- [heightmap.launch] use jsk_pcl_ros heightmap_converter.launch
- Stop using deprecated jsk_topic_tools/log_utils.h see
- [footstep_planner/footstep_marker] fix offset between end-coords and center of cube
- [jsk_footstep_planner] update launch for JAXON_RED
- [jsk_footstep_planner] Add plane_projection params for footstep_marker
- [jsk_footstep_planner] plane detection should be executed in fixed frame
- [jsk_footstep_planner] enable plane_projection option only when use_footstep_plane_detection is true
- [jsk_footstep_planner] Add launch files for footstep plane detection
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_planner] Use floor_detection to compensate initial z height errors caused by abc odom
- [jsk_footstep_planner] fix bug in FootstepStateDiscreteCloseList, range violation of volume_key
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_planner] Set use_go_pos_server arg true as default
- Add go_pos_server launch option to JAXON_RED footstep laucnh file
- [jsk_footstep_planner] Add rviz launch option to footstep launch file for JAXON_RED
- [jsk_footstep_planner] Add services to wait footstep execution and planning
- [jsk_footstep_planner] Fix transformation in pose stamped command (this transformation should be written by tf2, ideally)
- [jsk_footstep_planner] Set padding options to remove unnecessary points around a robot
- [footstep_planner] add support_padding_x,y
- [footstep_planner] use FootstepParameter for passing parameters
- [footstep_planner] add footstep_parameters.h
- [jsk_footstep_planner] fix parameter names
- [JAXON_RED] add more parameters to JAXON_RED_footstep_planner_perception.launch
- [jsk_footstep_planner] add planning_timeout parameter
- [jsk_footstep_planner] fix local_move and lazy_perception
- [footstep_marker] fix foot coordinates for rotated pose
- [JAXON] adjust parameters for footstep
- [footstep_planner] add parameter default_rfoot_to_lfoot_offset
- use normal for validating footsteps
- Merge remote-tracking branch 'origin/master' into fix_foot_center
- fix center position of footstep
- [jsk_footstep_planner] Add service to toggle planning mode
- [jsk_footstep_planner] Check actionlib server connection before sending goal in execute footstep callback
- [jsk_footstep_planner] Do not reset last footstep to connect next footstep plan result correctly in resetMarkerCB
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_planner] Add simple footstep correction scripts
- [jsk_footstep_planner] Add joy_footstep_marker launch, which control footstep_marker from joystick controller
- [jsk_footstep_planner] Add viewer for footstep_planner of JAXON
- [jsk_footstep_planner] Set skip_cropping option true as default
- [jsk_footstep_planner] Add skip_cropping option to toggle whether enabling cropping in pointcloud support check
- [jsk_footstep_planner] Add footstep_planner sample launch for JAXON_RED
- [jsk_footstep_planner] waitForResult in executeFootstepCB and check result status in service callback
- [jsk_footstep_planner] Add get_footstep_marker_pose service to footstep_marker
- [jsk_footstep_planner] Add reset_marker and execute_footstep service to footstep_marker
- Contributors: Iori Kumagai, Kentaro Wada, Shunichi Nozawa, Yohei Kakiuchi
0.1.9 (2016-03-23)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- [jsk_footstep_planner] Add command_pose_stampped to footstep_marker
- [jsk_footstep_planner] Add bbox visalization and check goal status sanity before planning
- [jsk_footstep_planner] Remove points around the robot from robot_center_pointcloud before combine with robot_center_map_origin_points
- [jsk_footstep_planner] Support projection from marker Modified:
- jsk_footstep_planner/include/jsk_footstep_planner/footstep_marker.h
- jsk_footstep_planner/src/footstep_marker.cpp
- Merge pull request #562 from garaemon/collision-avoidance [jsk_footstep_planner] Support collision avoidance in footstep planner
- [jsk_footstep_planner] Support collision check
- [jsk_footstep_planner] Not use im_helpers::add3Dof2DControl for backward compatibility
- [jsk_footstep_marker] Move footstep_marker from jsk_interactive_marker
- [jsk_footstep_planner] Fix genjava problem with
message_generation as build_depend Modified:
- jsk_footstep_planner/package.xml
- [jsk_footstep_planner] Only consider forward step stride in
heuristic estimation Modified:
- jsk_footstep_planner/src/footstep_graph.cpp
- [jsk_footstep_planner] Do not check pointcloud if no perception
mode Modified:
- jsk_footstep_planner/src/footstep_planner.cpp
- [jsk_footstep_controller] Merge heightmap nodelets into multisense_laser nodelet to reduce tf related nodes
- [jsk_footstep_planner] Add successors definitions for jaxon, jaxon_red and hrp2jsknt
- Update .travis to jsk-travis 0.2.1 and enable ccache
- {jsk_calibration, jsk_footstep_planner}/README.md: fix section/subsection
- [jsk_footstep_planner] Measure perception duration in collaborative perception-planning scheduling
- [jsk_footstep_planner] Fix skip_cropping=true behavior
- [jsk_footstep_planner] Remove literal value from benchmark code
- [jsk_footstep_planner] Remove ROBOT env from sample launch files
- Contributors: Kei Okada, Kentaro Wada, Ryohei Ueda, Iori Kumagai
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_footstep_planner] Add &allow-other-keys to fullbody-inverse-kinematics-with-standcoords. You can add :collision-check-robot-link-list and so on
- add variables to modify bounding box height
- [jsk_footstep_planner:footplace_sample]add sample file for footplace_manip
- [jsk_footstep_planner:footplace..]merge origin/master
- [jsk_footstep_planner:footplace~] debug output like normak ik
- fix minor bug in fullbody-inverse-kinematics-with-standcoords
- add args for ik with standcoords
- [jsk_footstep_planner] Ignore Z distance in heuristic computation
- Merge pull request #488 from garaemon/remove-global-variable [jsk_footstep_planner] Remove global variable from footplace planning
- [jsk_footstep_planner] Fix indent of footplace_planner_for_manipulation.l
- [jsk_footstep_planner] Remove global variable from footplace planning
- change name of inverse-reachablity code
- add foot placement coords with ik
- [jsk_footstep_planner] Add script to convert jsk_footstep_msgs/FootstepArray to jsk_recognition_msgs/BoundingBox
- [jsk_footstep_controller] Update footstep planner parameter for hrp2
- [jsk_footstep_planner] Verify global location of footstep in projecting start and goal footstep
- [jsk_footstep_planner] Add global transition limit to verify global location of footstep
- [jsk_footstep_planner/simple_neighbored_graph.h] add missing include string
- change static polygon param
- [jsk_footstep_planner] Do not use jsk_pcl_ros, use jsk_recognition_utils instead of it. These commits are forgotten in previous commit.
- [jsk_footstep_planner] Use jsk_recognition_utils instead of jsk_pcl_ros
- [jsk_footstep_planner] Update stair model to more difficult one
- [jsk_pcl_ros] Fix handling of --enable_lazy_perception and --enable_local_movement options and printout graph info
- [jsk_footstep_planner] Add infoString method to print footstep graph property
- [jsk_pcl_ros] Do not raise exception when cvs has lack data
- [jsk_footstep_planner] Add simple launch file to preview models for benchmarking
- [jsk_footstep_planner] Add --only-save-image option to plotting script
- [jsk_footstep_planner] Add --verbose option to bench_footstep_planner.cpp
- [jsk_footstep_planner] Save to eps figure when visualizing benchmark plot
- [jsk_footstep_planner] build pointcloud model in more wider area
- [jsk_footstep_planner] Check ANNGridCell is already allocated
- [jsk_footstep_planner/bench_footstep_planner] Project start and goal footstep before taking benchmark
- [jsk_footstep_planner] Add anonymous flag to ros::init in benchmark program
- [jsk_footstep_planner] Add several args to disable perception and run planner with hrpsys/gazebo
- [jsk_footstep_planner] Add start-abc button for planner gui using with simulator
- [jsk_footstep_planner] Update benchmark program to specify a lot of parameters
- [jsk_footstep_controller, jsk_teleop_joy] Use footstep-controller.l and lock/unlock furutaractive model during exeucuting footsteps
- [jsk_footstep_planner] Fix indent
- [jsk_footstep_planner] Fix typo: crpping -> cropping
- [jsk_footstep_planner, controller] Add rviz GUI set for playing with footstep planner
- [jsk_footstep_planner] Use odom_init frame to publish plane for unseen region
- [jsk_footstep_controller/footcoords] Add odom_init frame which holds the pose when robot is put on the ground
- [jsk_footstep_planner] Add gaussian pointcloud to pointcloud generator
- Merge pull request #414 from garaemon/default-body-on-odom [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Print error message about projection on rviz
- [jsk_footstep_controller] Add simple-footstep-controller as the most simplest footstep controller using :set-foot-steps
- [jsk_footstep_planner] Check pointcloud is available before projection
- [jsk_footstep_planner] Cleanup heightmap launch files
- Merge remote-tracking branch 'refs/remotes/origin/master' into crosscheck
- [jsk_footstep_planner] Implement cross check
- [jsk_footstep_planner] Add launch file to run footstep planner with heightmap integration
- [jsk_footstep_planner] Add text information on rviz
- [jsk_footstep_planner] Ignore warning message from pcl
- [jsk_footstep_planner] Fix projection around yaw axis orientation
- [jsk_footstep_planner] Add launch file for heightmap mapping
- Merge remote-tracking branch 'refs/remotes/origin/master' into hole-rate Conflicts: jsk_footstep_planner/src/pointcloud_model_generator.cpp
- [jsk_footstep_planner] Add ~hole_rate to simulate hole in pointcloud
- [jsk_footstep_planner] Publish pointcloud periodically from pointcloud_model_generator_node
- [jsk_footstep_planner] Just use kdtree nearest search in checking if footstep is on pointcloud
- [jsk_footstep_planner] add cost_weight and heuristic_weight parameter
- [jsk_footstep_planner] Update pointcloud to show close list and open list during planning
- [jsk_footstep_planner] Check value of transition when expanding nodes
- [jsk_footstep_planner] Use center of footprint to check if footprint is on pointcloud
- [jsk_footstep_planner] Project footprint with local search
- [jsk_footstep_planner] Add projection API to c++ footstep planner
- [jsk_footstep_planner] Add more parmeters to dynamic_reconfigure API of cpp footstep_planner
- [jsk_footstep_planner] Add perception sample with actionlib interface
- [jsk_footstep_planner] Add actionlib interface to C++ version of footstep planner. and add simplest smaple
- [jsk_footstep_planning] Visualize open and close list as pointcloud
- [jsk_footstep_planner] Fix ANNGrid search
- [jsk_footstep_planner] Skip planar region perception if footstep is already on pointcloud
- [jsk_footstep_planner] PointCloud approximate search based on 2-D grid
- [jsk_footstep_planner] Implement local movement if footstep is close to success of projection to pointcloud
- [jsk_footstep_planner] Check pointcloud model supports footprint
- [jsk_footstep_planner] Do not use SVD in perception
- [jsk_footstep_planner] Re-implement footstepHeuristicStepCost in
computationally-efficient way.
- Do not use Eigen::Affine3f::rotation because it calls SVD internally.
2. Do not cast to Eigen::AngleAxisf, just use cos(w/2) to compute angle from quaternion.
- [jsk_footstep_planner] Add profile function interface
- [jsk_footstep_planner] Add script to plot bench result
- [jsk_footstep_planning] Add program to bench footstep planning speed
- [jsk_footstep_planner] Add demonstration of footstep planning over curved and sloped surface
- [jsk_footstep_planner] Fix orientation of projected footstep
- [jsk_footstep_planner] Add timeout argument to solver
- [jsk_footstep_planner] Fix when footstep failed to project on planar region
-
[jsk_footstep_planner] Planning with pointcloud model is implemented. We optimized perception phase by lazy-perception-in-planning technique: 1) Do not detect planar region before planning
2) Do not detect planar region until accurate pose of footstep is required 3) use 2.5D pointcloud to get candidate pointcloud which footstep is placed on
- [jsk_footstep_planner] Add demo for curved surface
- [jsk_footstep_planner] Interactive demo of C++ footstep planner
- [jsk_footstep_planner] Use FootstepStateDiscreteCloseList for close list
- [jsk_footstep_planner] 2D footstep planning is implemented in C++
- [jsk_footstep_planner] Implement FootstepState and projection to pointcloud
- [jsk_footstep_planner] Add demo directory and install headers and library
- [jsk_footstep_planner] Implement C++ a* solver
- [jsk_footstep_planner] Initial commit of cpp graph library
- [jsk_footstep_planner] Update jaxon_red footprint region
- [jsk_footstep_planner, jsk_footstep_controller] Support HRP2JSKNT
- [jsk_footstep_planner, jsk_footstep_controller] Add USE_JOY option
- [jsk_footstep_planner, jsk_footstep_controller] Refactor launch file and add no_recog.launch
- [jsk_footstep_planner] Rename launch file to use ROBOT environment variable
- Contributors: Masaki Murooka, Ryohei Ueda, Yu Ohara, Yuki Furuta, Yusuke Oshiro
0.1.6 (2015-06-11)
- [jsk_footstep_planner] Enable roll paranoid mode
- Merge pull request #327 from garaemon/set-heuristic [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_controller] Fix parameters for jaxon red
- [jsk_footstep_planner] Fix for terrain task
- [jsk_footstep_planner] Add topic interface to project footprint
- [jsk_footstep_planner] Support JAXON_RED
- [jsk_footstep_planner, jsk_footstep_controller] Update for las vegas terrain with jaxon
- [jsk_footstep_planner] Enable roll paranoid mode again
- [jsk_footstep_planner, jsk_footstep_controller] Update for jaxon terrain
- [jsk_footstep_planner] Add simple script to transform frame_id of jsk_footstep_msgs/FootstepArray
- [jsk_footstep_controller] Change gait generator parameters according to plane condition including pitch angle and taking into account if transition is upward or downward
- [jsk_footstep_planner, jsk_footstep_controller] Compute x and y from previous coordinates to detect rolled plane
- [jsk_footstep_planner, jsk_footstep_controller] Support rolling terrain, I hope
- [jsk_footstep_planner, jsk_footstep_controller] Fix typo and update parameter for terrain
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon parameter files
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon footstep planning, Do not merge yet
- [jsk_footstep_planner] locally search reasonable goal when snapping
- [jsk_footstep_planner] Update offset parameter
- [jsk_footstep_planner] Support offset parameter from end coords to center of foot polygon
- [jsk_footstep_planner] Optimize function to remove shadow cells by using local coordinates
- [jsk_footstep_planner] Update projection parameter for slope terrain
- [jsk_footstep_planner] Add ~remove_shadow_cells to add padding to shadow cells
-
[jsk_footstep_planner] Improve planning for different levels: 1. Move successors a little bit when projecting footprint to different level 2. Use footstep coordinate rather than mid-coords of the footstep as goal coordinates
- [jsk_footstep_planner] Check transition limit when planning across diffrent levels
- [jsk_footstep_planner] Add gui-debug symbol and ~toggle_gui_debug service to toggle debug using gui
- [jsk_footstep_planner] Add service API to project pose onto the nearest grid
- [jsk_footstep_planner] More greedy heuristic and compile euslisp code correctly
- [jsk_footstep_planner] Separate successors for same level and transition across different level
- [jsk_footstep_planner] Update successors' parameters
- [jsk_footstep_planner] Check range of grids first in occupancy-grid
- [jsk_footstep_planner] Use glVertexPointer and glDrawArrays to draw occupancy-grid
- [jsk_footstep_planner] Optimize creation of occupancy-grid by using integer-vector rather than hash-table
- [jsk_footstep_planner] Fix bug to compute rotate footstep to snap onto planes
- [jsk_footstep_planner] Update successors parameter
- [jsk_footstep_planner] add geo package to quaternion-from-two-vectors
- [jsk_footstep_planner] Read footstep parameter from file rather than ros parameter
- [jsk_footstep_planner] Use quaternion-from-two-vectors to compute rotate in project-coords-on-to-plane
- [jsk_footstep_planner] Add method to generate occupancy-grid from face
- [jsk_footstep_planner] Use mtimer instead of ros::time-now
- [jsk_footstep_planner] Fix minor bugs
- [jsk_footstep_planner] Memoize projecting grid and re-use it when the planner checks the plane is placable and refactor function names
- [jsk_footstep_planner] Optimize hash size according to cell num
- [jsk_footstep_planner] A lot of improvements on planner
- Fix about orientation of projected footstep
- Lazy evaluation to check if footprint is able to be on grid
- Use mid-coords of footprints to evaluate heuristic
- [jsk_footstep_planner] Do not check if the footstep can be placable on plane across planes
- [jsk_footstep_planner] Support SimpleOccupancyGrid in footstep planner
- [jsk_footstep_planner] Snap geometry_msgs::PoseStamped (from rviz) onto grid map
- [jsk_footstep_planner] Move more functions to footstep_planner_utill.l from footstep_planner.l
- [jsk_footstep_planner] Support color in occupancy-grid class
- [jsk_footstep_planner] Return vertices in global coordinates in :vertices method of occupancy-grid
- [jsk_footstep_planner] Euslisp binding of jsk_recognition_msgs::SimpleOccupancyGrid message
- [jsk_footstep_planner] separate standalone utility functions into footstep_planner_util.l
- [jsk_footstep_planner] Add publisher of polygon of footprint for HRP2JSK
- [jsk_footstep_planner] Add euslisp wrapper to snap footstep on planes
- [jsk_footstep_plannar] Resolve pose of footstep respacted to initial footstep
- [jsk_footstep_plannner] Visualize euslisp footstep on rviz
- [jsk_footstep_planner] Use jsk_recognition_msgs
- Contributors: Ryohei Ueda, Yu Ohara
0.1.5 (2015-01-08)
- renamed make_sumple function
- added make-coords-list function
- added inverse_reachablity_with_given_coords
- Update drcmodel for current planner
- Add sample to compare heuristic functions
- add api to change successor
- Merge remote-tracking branch 'origin/master' into add-breakpoint-text Conflicts: jsk_footstep_controller/euslisp/footstep-controller.l jsk_footstep_controller/launch/hrp2jsknt_real_full.launch
- Add text publishing when checking breakpoint
- Do not allow step over 250mm stride
- Supress x-transition after z-transition. All the threshold is hard-coded
- Update footstep parameter for climing up stairs: larger footstep and smaller footprint
- Add dimensions of footsteps to the result of footstep planner
- Visualize footstep successors
- roseus only needs runtime
- Contributors: Kei Okada, Ryohei Ueda, Yu Ohara
0.1.4 (2014-10-21)
0.1.3 (2014-10-10)
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use lock/unlock service of environment server to lock/unlock the environment during planning
- compile euslisp file before running footstep planner
- publish footstep for visualization from planner
- update usage of env server according to the latest changeset of jsk_recognition
- use env server of jsk_pcl_ros
- ignore emtpy polygon message
- prepend initial steps to the result of the footstep planning
- call x::window-main-onw only if debug is t in jsk_footstep_planner/footstep-planner-node.l
- support 6dof planning
- adding model for footstep planning
- finalize footstep by goal steps
- supporting slope in footstep planning
- update for slope planning
- begins to support slope
- automatically choose the goal footstep
- store goal footstep to the problem class
- supress debug message of footstep planner
- update python scripts for catkin
- load msgs directory
- fix dependency
- keep permission of euslisp codes
- catkinize jsk_footstep_planner
- fix to keep orientation after projection to the planes
- supporting z-direction movement in planning
- supporting timeout of planning
- adding jsk_footstep_planner, euslisp implementation
- Contributors: Ryohei Ueda, Masaki Murooka
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_successors_visualization.launch
- launch/eusplanner/example.launch
- launch/eusplanner/footstep_successors_visualization.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
- [footstep_planner] add local move offset
- [footstep_planner] remove debug message / fix for very short path
- [footstep_planner] add PathCost and Successor function
- [jsk_footstep_planner] add project_footstep service
- [jsk_footstep_planner/config/*footstep_planner_params.yaml] Update HRP2JSKNT, HRP2JSKNTS footstep planner params and add parameter for JAXON.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test] Increase test time to 5 minutes.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.l] Add test for slope and stair
- [jsk_footstep_planner/config/sample_robot_footstep_planner_params.yaml] Update parameters for stair slope test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Dump goal pos rot thre and transition limit
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Use analysis-level coords while IK.
- [footstep_planner] add check collision when validating goal state
- [footstep_planner] add offset for successor test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add euslisp code to generate eus sample robot footstep planner params
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test,.l, config/sample_robot_footstep_planner_params.yaml] Add test for footstep successors and add config parameter for euslisp sample robot. Make default tested robot as sample robot.
- [jsk_footstep_planner/CMakeLists.txt,package.xml] Add footstep planner rostest. roseus dependency is required for message generation.
- [footstep_planner] add check collision when finalizing
- [jsk_footstep_planner/footstep_plnner.cpp] add ROS_INFO for read successors
- Migrate srv files from jsk_pcl_ros to jsk_recognition_msgs see
- [jsk_footstep_planner/footstep_plnner.cpp] fix successor processing using [r/l]leg_offset
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add generator for some footstep planner parameters using robot model
- [jsk_footstep_planner/config/HRP2JSKNT*_footstep_planner_params.yaml] Add hrp2 footstep planner settings.
- [jsk_footstep_planner/config/JAXON_RED_footstep_planner_params.yaml, launch/cppplanner/optimistic_footstep_planner.launch] Move some footstep parameters to parameter files.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch, README, euslisp/footstep-planner-client-sample.l, test/test_footstep_planning_eus_client.test] Use argument ROBOT instead of env ROBOT
- [jsk_footstep_planner/test] Add simple test for footstep_planner
- [jsk_footstep_planner/src/footstep_graph.cpp] isColliding returns false if use obstacle model is true and no obstacles are specified (point cloud size = 0).
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch] Check arg for USE_PERCEPTION for use_lazy_perception
- [jsk_footstep_planner/launch/cppplanner/footstep_planner.rviz,optimistic_footstep_planner.launch] Enable use_obstacle_model and display obstacle model as point cloud.
- [jsk_footstep_planner] update sample (footstep-planner-client-sample.l)
- [heightmap.launch] use jsk_pcl_ros heightmap_converter.launch
- Stop using deprecated jsk_topic_tools/log_utils.h see
- [footstep_planner/footstep_marker] fix offset between end-coords and center of cube
- [jsk_footstep_planner] update launch for JAXON_RED
- [jsk_footstep_planner] Add plane_projection params for footstep_marker
- [jsk_footstep_planner] plane detection should be executed in fixed frame
- [jsk_footstep_planner] enable plane_projection option only when use_footstep_plane_detection is true
- [jsk_footstep_planner] Add launch files for footstep plane detection
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_planner] Use floor_detection to compensate initial z height errors caused by abc odom
- [jsk_footstep_planner] fix bug in FootstepStateDiscreteCloseList, range violation of volume_key
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_planner] Set use_go_pos_server arg true as default
- Add go_pos_server launch option to JAXON_RED footstep laucnh file
- [jsk_footstep_planner] Add rviz launch option to footstep launch file for JAXON_RED
- [jsk_footstep_planner] Add services to wait footstep execution and planning
- [jsk_footstep_planner] Fix transformation in pose stamped command (this transformation should be written by tf2, ideally)
- [jsk_footstep_planner] Set padding options to remove unnecessary points around a robot
- [footstep_planner] add support_padding_x,y
- [footstep_planner] use FootstepParameter for passing parameters
- [footstep_planner] add footstep_parameters.h
- [jsk_footstep_planner] fix parameter names
- [JAXON_RED] add more parameters to JAXON_RED_footstep_planner_perception.launch
- [jsk_footstep_planner] add planning_timeout parameter
- [jsk_footstep_planner] fix local_move and lazy_perception
- [footstep_marker] fix foot coordinates for rotated pose
- [JAXON] adjust parameters for footstep
- [footstep_planner] add parameter default_rfoot_to_lfoot_offset
- use normal for validating footsteps
- Merge remote-tracking branch 'origin/master' into fix_foot_center
- fix center position of footstep
- [jsk_footstep_planner] Add service to toggle planning mode
- [jsk_footstep_planner] Check actionlib server connection before sending goal in execute footstep callback
- [jsk_footstep_planner] Do not reset last footstep to connect next footstep plan result correctly in resetMarkerCB
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_planner] Add simple footstep correction scripts
- [jsk_footstep_planner] Add joy_footstep_marker launch, which control footstep_marker from joystick controller
- [jsk_footstep_planner] Add viewer for footstep_planner of JAXON
- [jsk_footstep_planner] Set skip_cropping option true as default
- [jsk_footstep_planner] Add skip_cropping option to toggle whether enabling cropping in pointcloud support check
- [jsk_footstep_planner] Add footstep_planner sample launch for JAXON_RED
- [jsk_footstep_planner] waitForResult in executeFootstepCB and check result status in service callback
- [jsk_footstep_planner] Add get_footstep_marker_pose service to footstep_marker
- [jsk_footstep_planner] Add reset_marker and execute_footstep service to footstep_marker
- Contributors: Iori Kumagai, Kentaro Wada, Shunichi Nozawa, Yohei Kakiuchi
0.1.9 (2016-03-23)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- [jsk_footstep_planner] Add command_pose_stampped to footstep_marker
- [jsk_footstep_planner] Add bbox visalization and check goal status sanity before planning
- [jsk_footstep_planner] Remove points around the robot from robot_center_pointcloud before combine with robot_center_map_origin_points
- [jsk_footstep_planner] Support projection from marker Modified:
- jsk_footstep_planner/include/jsk_footstep_planner/footstep_marker.h
- jsk_footstep_planner/src/footstep_marker.cpp
- Merge pull request #562 from garaemon/collision-avoidance [jsk_footstep_planner] Support collision avoidance in footstep planner
- [jsk_footstep_planner] Support collision check
- [jsk_footstep_planner] Not use im_helpers::add3Dof2DControl for backward compatibility
- [jsk_footstep_marker] Move footstep_marker from jsk_interactive_marker
- [jsk_footstep_planner] Fix genjava problem with
message_generation as build_depend Modified:
- jsk_footstep_planner/package.xml
- [jsk_footstep_planner] Only consider forward step stride in
heuristic estimation Modified:
- jsk_footstep_planner/src/footstep_graph.cpp
- [jsk_footstep_planner] Do not check pointcloud if no perception
mode Modified:
- jsk_footstep_planner/src/footstep_planner.cpp
- [jsk_footstep_controller] Merge heightmap nodelets into multisense_laser nodelet to reduce tf related nodes
- [jsk_footstep_planner] Add successors definitions for jaxon, jaxon_red and hrp2jsknt
- Update .travis to jsk-travis 0.2.1 and enable ccache
- {jsk_calibration, jsk_footstep_planner}/README.md: fix section/subsection
- [jsk_footstep_planner] Measure perception duration in collaborative perception-planning scheduling
- [jsk_footstep_planner] Fix skip_cropping=true behavior
- [jsk_footstep_planner] Remove literal value from benchmark code
- [jsk_footstep_planner] Remove ROBOT env from sample launch files
- Contributors: Kei Okada, Kentaro Wada, Ryohei Ueda, Iori Kumagai
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_footstep_planner] Add &allow-other-keys to fullbody-inverse-kinematics-with-standcoords. You can add :collision-check-robot-link-list and so on
- add variables to modify bounding box height
- [jsk_footstep_planner:footplace_sample]add sample file for footplace_manip
- [jsk_footstep_planner:footplace..]merge origin/master
- [jsk_footstep_planner:footplace~] debug output like normak ik
- fix minor bug in fullbody-inverse-kinematics-with-standcoords
- add args for ik with standcoords
- [jsk_footstep_planner] Ignore Z distance in heuristic computation
- Merge pull request #488 from garaemon/remove-global-variable [jsk_footstep_planner] Remove global variable from footplace planning
- [jsk_footstep_planner] Fix indent of footplace_planner_for_manipulation.l
- [jsk_footstep_planner] Remove global variable from footplace planning
- change name of inverse-reachablity code
- add foot placement coords with ik
- [jsk_footstep_planner] Add script to convert jsk_footstep_msgs/FootstepArray to jsk_recognition_msgs/BoundingBox
- [jsk_footstep_controller] Update footstep planner parameter for hrp2
- [jsk_footstep_planner] Verify global location of footstep in projecting start and goal footstep
- [jsk_footstep_planner] Add global transition limit to verify global location of footstep
- [jsk_footstep_planner/simple_neighbored_graph.h] add missing include string
- change static polygon param
- [jsk_footstep_planner] Do not use jsk_pcl_ros, use jsk_recognition_utils instead of it. These commits are forgotten in previous commit.
- [jsk_footstep_planner] Use jsk_recognition_utils instead of jsk_pcl_ros
- [jsk_footstep_planner] Update stair model to more difficult one
- [jsk_pcl_ros] Fix handling of --enable_lazy_perception and --enable_local_movement options and printout graph info
- [jsk_footstep_planner] Add infoString method to print footstep graph property
- [jsk_pcl_ros] Do not raise exception when cvs has lack data
- [jsk_footstep_planner] Add simple launch file to preview models for benchmarking
- [jsk_footstep_planner] Add --only-save-image option to plotting script
- [jsk_footstep_planner] Add --verbose option to bench_footstep_planner.cpp
- [jsk_footstep_planner] Save to eps figure when visualizing benchmark plot
- [jsk_footstep_planner] build pointcloud model in more wider area
- [jsk_footstep_planner] Check ANNGridCell is already allocated
- [jsk_footstep_planner/bench_footstep_planner] Project start and goal footstep before taking benchmark
- [jsk_footstep_planner] Add anonymous flag to ros::init in benchmark program
- [jsk_footstep_planner] Add several args to disable perception and run planner with hrpsys/gazebo
- [jsk_footstep_planner] Add start-abc button for planner gui using with simulator
- [jsk_footstep_planner] Update benchmark program to specify a lot of parameters
- [jsk_footstep_controller, jsk_teleop_joy] Use footstep-controller.l and lock/unlock furutaractive model during exeucuting footsteps
- [jsk_footstep_planner] Fix indent
- [jsk_footstep_planner] Fix typo: crpping -> cropping
- [jsk_footstep_planner, controller] Add rviz GUI set for playing with footstep planner
- [jsk_footstep_planner] Use odom_init frame to publish plane for unseen region
- [jsk_footstep_controller/footcoords] Add odom_init frame which holds the pose when robot is put on the ground
- [jsk_footstep_planner] Add gaussian pointcloud to pointcloud generator
- Merge pull request #414 from garaemon/default-body-on-odom [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Print error message about projection on rviz
- [jsk_footstep_controller] Add simple-footstep-controller as the most simplest footstep controller using :set-foot-steps
- [jsk_footstep_planner] Check pointcloud is available before projection
- [jsk_footstep_planner] Cleanup heightmap launch files
- Merge remote-tracking branch 'refs/remotes/origin/master' into crosscheck
- [jsk_footstep_planner] Implement cross check
- [jsk_footstep_planner] Add launch file to run footstep planner with heightmap integration
- [jsk_footstep_planner] Add text information on rviz
- [jsk_footstep_planner] Ignore warning message from pcl
- [jsk_footstep_planner] Fix projection around yaw axis orientation
- [jsk_footstep_planner] Add launch file for heightmap mapping
- Merge remote-tracking branch 'refs/remotes/origin/master' into hole-rate Conflicts: jsk_footstep_planner/src/pointcloud_model_generator.cpp
- [jsk_footstep_planner] Add ~hole_rate to simulate hole in pointcloud
- [jsk_footstep_planner] Publish pointcloud periodically from pointcloud_model_generator_node
- [jsk_footstep_planner] Just use kdtree nearest search in checking if footstep is on pointcloud
- [jsk_footstep_planner] add cost_weight and heuristic_weight parameter
- [jsk_footstep_planner] Update pointcloud to show close list and open list during planning
- [jsk_footstep_planner] Check value of transition when expanding nodes
- [jsk_footstep_planner] Use center of footprint to check if footprint is on pointcloud
- [jsk_footstep_planner] Project footprint with local search
- [jsk_footstep_planner] Add projection API to c++ footstep planner
- [jsk_footstep_planner] Add more parmeters to dynamic_reconfigure API of cpp footstep_planner
- [jsk_footstep_planner] Add perception sample with actionlib interface
- [jsk_footstep_planner] Add actionlib interface to C++ version of footstep planner. and add simplest smaple
- [jsk_footstep_planning] Visualize open and close list as pointcloud
- [jsk_footstep_planner] Fix ANNGrid search
- [jsk_footstep_planner] Skip planar region perception if footstep is already on pointcloud
- [jsk_footstep_planner] PointCloud approximate search based on 2-D grid
- [jsk_footstep_planner] Implement local movement if footstep is close to success of projection to pointcloud
- [jsk_footstep_planner] Check pointcloud model supports footprint
- [jsk_footstep_planner] Do not use SVD in perception
- [jsk_footstep_planner] Re-implement footstepHeuristicStepCost in
computationally-efficient way.
- Do not use Eigen::Affine3f::rotation because it calls SVD internally.
2. Do not cast to Eigen::AngleAxisf, just use cos(w/2) to compute angle from quaternion.
- [jsk_footstep_planner] Add profile function interface
- [jsk_footstep_planner] Add script to plot bench result
- [jsk_footstep_planning] Add program to bench footstep planning speed
- [jsk_footstep_planner] Add demonstration of footstep planning over curved and sloped surface
- [jsk_footstep_planner] Fix orientation of projected footstep
- [jsk_footstep_planner] Add timeout argument to solver
- [jsk_footstep_planner] Fix when footstep failed to project on planar region
-
[jsk_footstep_planner] Planning with pointcloud model is implemented. We optimized perception phase by lazy-perception-in-planning technique: 1) Do not detect planar region before planning
2) Do not detect planar region until accurate pose of footstep is required 3) use 2.5D pointcloud to get candidate pointcloud which footstep is placed on
- [jsk_footstep_planner] Add demo for curved surface
- [jsk_footstep_planner] Interactive demo of C++ footstep planner
- [jsk_footstep_planner] Use FootstepStateDiscreteCloseList for close list
- [jsk_footstep_planner] 2D footstep planning is implemented in C++
- [jsk_footstep_planner] Implement FootstepState and projection to pointcloud
- [jsk_footstep_planner] Add demo directory and install headers and library
- [jsk_footstep_planner] Implement C++ a* solver
- [jsk_footstep_planner] Initial commit of cpp graph library
- [jsk_footstep_planner] Update jaxon_red footprint region
- [jsk_footstep_planner, jsk_footstep_controller] Support HRP2JSKNT
- [jsk_footstep_planner, jsk_footstep_controller] Add USE_JOY option
- [jsk_footstep_planner, jsk_footstep_controller] Refactor launch file and add no_recog.launch
- [jsk_footstep_planner] Rename launch file to use ROBOT environment variable
- Contributors: Masaki Murooka, Ryohei Ueda, Yu Ohara, Yuki Furuta, Yusuke Oshiro
0.1.6 (2015-06-11)
- [jsk_footstep_planner] Enable roll paranoid mode
- Merge pull request #327 from garaemon/set-heuristic [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_controller] Fix parameters for jaxon red
- [jsk_footstep_planner] Fix for terrain task
- [jsk_footstep_planner] Add topic interface to project footprint
- [jsk_footstep_planner] Support JAXON_RED
- [jsk_footstep_planner, jsk_footstep_controller] Update for las vegas terrain with jaxon
- [jsk_footstep_planner] Enable roll paranoid mode again
- [jsk_footstep_planner, jsk_footstep_controller] Update for jaxon terrain
- [jsk_footstep_planner] Add simple script to transform frame_id of jsk_footstep_msgs/FootstepArray
- [jsk_footstep_controller] Change gait generator parameters according to plane condition including pitch angle and taking into account if transition is upward or downward
- [jsk_footstep_planner, jsk_footstep_controller] Compute x and y from previous coordinates to detect rolled plane
- [jsk_footstep_planner, jsk_footstep_controller] Support rolling terrain, I hope
- [jsk_footstep_planner, jsk_footstep_controller] Fix typo and update parameter for terrain
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon parameter files
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon footstep planning, Do not merge yet
- [jsk_footstep_planner] locally search reasonable goal when snapping
- [jsk_footstep_planner] Update offset parameter
- [jsk_footstep_planner] Support offset parameter from end coords to center of foot polygon
- [jsk_footstep_planner] Optimize function to remove shadow cells by using local coordinates
- [jsk_footstep_planner] Update projection parameter for slope terrain
- [jsk_footstep_planner] Add ~remove_shadow_cells to add padding to shadow cells
-
[jsk_footstep_planner] Improve planning for different levels: 1. Move successors a little bit when projecting footprint to different level 2. Use footstep coordinate rather than mid-coords of the footstep as goal coordinates
- [jsk_footstep_planner] Check transition limit when planning across diffrent levels
- [jsk_footstep_planner] Add gui-debug symbol and ~toggle_gui_debug service to toggle debug using gui
- [jsk_footstep_planner] Add service API to project pose onto the nearest grid
- [jsk_footstep_planner] More greedy heuristic and compile euslisp code correctly
- [jsk_footstep_planner] Separate successors for same level and transition across different level
- [jsk_footstep_planner] Update successors' parameters
- [jsk_footstep_planner] Check range of grids first in occupancy-grid
- [jsk_footstep_planner] Use glVertexPointer and glDrawArrays to draw occupancy-grid
- [jsk_footstep_planner] Optimize creation of occupancy-grid by using integer-vector rather than hash-table
- [jsk_footstep_planner] Fix bug to compute rotate footstep to snap onto planes
- [jsk_footstep_planner] Update successors parameter
- [jsk_footstep_planner] add geo package to quaternion-from-two-vectors
- [jsk_footstep_planner] Read footstep parameter from file rather than ros parameter
- [jsk_footstep_planner] Use quaternion-from-two-vectors to compute rotate in project-coords-on-to-plane
- [jsk_footstep_planner] Add method to generate occupancy-grid from face
- [jsk_footstep_planner] Use mtimer instead of ros::time-now
- [jsk_footstep_planner] Fix minor bugs
- [jsk_footstep_planner] Memoize projecting grid and re-use it when the planner checks the plane is placable and refactor function names
- [jsk_footstep_planner] Optimize hash size according to cell num
- [jsk_footstep_planner] A lot of improvements on planner
- Fix about orientation of projected footstep
- Lazy evaluation to check if footprint is able to be on grid
- Use mid-coords of footprints to evaluate heuristic
- [jsk_footstep_planner] Do not check if the footstep can be placable on plane across planes
- [jsk_footstep_planner] Support SimpleOccupancyGrid in footstep planner
- [jsk_footstep_planner] Snap geometry_msgs::PoseStamped (from rviz) onto grid map
- [jsk_footstep_planner] Move more functions to footstep_planner_utill.l from footstep_planner.l
- [jsk_footstep_planner] Support color in occupancy-grid class
- [jsk_footstep_planner] Return vertices in global coordinates in :vertices method of occupancy-grid
- [jsk_footstep_planner] Euslisp binding of jsk_recognition_msgs::SimpleOccupancyGrid message
- [jsk_footstep_planner] separate standalone utility functions into footstep_planner_util.l
- [jsk_footstep_planner] Add publisher of polygon of footprint for HRP2JSK
- [jsk_footstep_planner] Add euslisp wrapper to snap footstep on planes
- [jsk_footstep_plannar] Resolve pose of footstep respacted to initial footstep
- [jsk_footstep_plannner] Visualize euslisp footstep on rviz
- [jsk_footstep_planner] Use jsk_recognition_msgs
- Contributors: Ryohei Ueda, Yu Ohara
0.1.5 (2015-01-08)
- renamed make_sumple function
- added make-coords-list function
- added inverse_reachablity_with_given_coords
- Update drcmodel for current planner
- Add sample to compare heuristic functions
- add api to change successor
- Merge remote-tracking branch 'origin/master' into add-breakpoint-text Conflicts: jsk_footstep_controller/euslisp/footstep-controller.l jsk_footstep_controller/launch/hrp2jsknt_real_full.launch
- Add text publishing when checking breakpoint
- Do not allow step over 250mm stride
- Supress x-transition after z-transition. All the threshold is hard-coded
- Update footstep parameter for climing up stairs: larger footstep and smaller footprint
- Add dimensions of footsteps to the result of footstep planner
- Visualize footstep successors
- roseus only needs runtime
- Contributors: Kei Okada, Ryohei Ueda, Yu Ohara
0.1.4 (2014-10-21)
0.1.3 (2014-10-10)
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use lock/unlock service of environment server to lock/unlock the environment during planning
- compile euslisp file before running footstep planner
- publish footstep for visualization from planner
- update usage of env server according to the latest changeset of jsk_recognition
- use env server of jsk_pcl_ros
- ignore emtpy polygon message
- prepend initial steps to the result of the footstep planning
- call x::window-main-onw only if debug is t in jsk_footstep_planner/footstep-planner-node.l
- support 6dof planning
- adding model for footstep planning
- finalize footstep by goal steps
- supporting slope in footstep planning
- update for slope planning
- begins to support slope
- automatically choose the goal footstep
- store goal footstep to the problem class
- supress debug message of footstep planner
- update python scripts for catkin
- load msgs directory
- fix dependency
- keep permission of euslisp codes
- catkinize jsk_footstep_planner
- fix to keep orientation after projection to the planes
- supporting z-direction movement in planning
- supporting timeout of planning
- adding jsk_footstep_planner, euslisp implementation
- Contributors: Ryohei Ueda, Masaki Murooka
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_successors_visualization.launch
- launch/eusplanner/example.launch
- launch/eusplanner/footstep_successors_visualization.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
- [footstep_planner] add local move offset
- [footstep_planner] remove debug message / fix for very short path
- [footstep_planner] add PathCost and Successor function
- [jsk_footstep_planner] add project_footstep service
- [jsk_footstep_planner/config/*footstep_planner_params.yaml] Update HRP2JSKNT, HRP2JSKNTS footstep planner params and add parameter for JAXON.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test] Increase test time to 5 minutes.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.l] Add test for slope and stair
- [jsk_footstep_planner/config/sample_robot_footstep_planner_params.yaml] Update parameters for stair slope test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Dump goal pos rot thre and transition limit
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Use analysis-level coords while IK.
- [footstep_planner] add check collision when validating goal state
- [footstep_planner] add offset for successor test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add euslisp code to generate eus sample robot footstep planner params
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test,.l, config/sample_robot_footstep_planner_params.yaml] Add test for footstep successors and add config parameter for euslisp sample robot. Make default tested robot as sample robot.
- [jsk_footstep_planner/CMakeLists.txt,package.xml] Add footstep planner rostest. roseus dependency is required for message generation.
- [footstep_planner] add check collision when finalizing
- [jsk_footstep_planner/footstep_plnner.cpp] add ROS_INFO for read successors
- Migrate srv files from jsk_pcl_ros to jsk_recognition_msgs see
- [jsk_footstep_planner/footstep_plnner.cpp] fix successor processing using [r/l]leg_offset
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add generator for some footstep planner parameters using robot model
- [jsk_footstep_planner/config/HRP2JSKNT*_footstep_planner_params.yaml] Add hrp2 footstep planner settings.
- [jsk_footstep_planner/config/JAXON_RED_footstep_planner_params.yaml, launch/cppplanner/optimistic_footstep_planner.launch] Move some footstep parameters to parameter files.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch, README, euslisp/footstep-planner-client-sample.l, test/test_footstep_planning_eus_client.test] Use argument ROBOT instead of env ROBOT
- [jsk_footstep_planner/test] Add simple test for footstep_planner
- [jsk_footstep_planner/src/footstep_graph.cpp] isColliding returns false if use obstacle model is true and no obstacles are specified (point cloud size = 0).
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch] Check arg for USE_PERCEPTION for use_lazy_perception
- [jsk_footstep_planner/launch/cppplanner/footstep_planner.rviz,optimistic_footstep_planner.launch] Enable use_obstacle_model and display obstacle model as point cloud.
- [jsk_footstep_planner] update sample (footstep-planner-client-sample.l)
- [heightmap.launch] use jsk_pcl_ros heightmap_converter.launch
- Stop using deprecated jsk_topic_tools/log_utils.h see
- [footstep_planner/footstep_marker] fix offset between end-coords and center of cube
- [jsk_footstep_planner] update launch for JAXON_RED
- [jsk_footstep_planner] Add plane_projection params for footstep_marker
- [jsk_footstep_planner] plane detection should be executed in fixed frame
- [jsk_footstep_planner] enable plane_projection option only when use_footstep_plane_detection is true
- [jsk_footstep_planner] Add launch files for footstep plane detection
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_planner] Use floor_detection to compensate initial z height errors caused by abc odom
- [jsk_footstep_planner] fix bug in FootstepStateDiscreteCloseList, range violation of volume_key
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_planner] Set use_go_pos_server arg true as default
- Add go_pos_server launch option to JAXON_RED footstep laucnh file
- [jsk_footstep_planner] Add rviz launch option to footstep launch file for JAXON_RED
- [jsk_footstep_planner] Add services to wait footstep execution and planning
- [jsk_footstep_planner] Fix transformation in pose stamped command (this transformation should be written by tf2, ideally)
- [jsk_footstep_planner] Set padding options to remove unnecessary points around a robot
- [footstep_planner] add support_padding_x,y
- [footstep_planner] use FootstepParameter for passing parameters
- [footstep_planner] add footstep_parameters.h
- [jsk_footstep_planner] fix parameter names
- [JAXON_RED] add more parameters to JAXON_RED_footstep_planner_perception.launch
- [jsk_footstep_planner] add planning_timeout parameter
- [jsk_footstep_planner] fix local_move and lazy_perception
- [footstep_marker] fix foot coordinates for rotated pose
- [JAXON] adjust parameters for footstep
- [footstep_planner] add parameter default_rfoot_to_lfoot_offset
- use normal for validating footsteps
- Merge remote-tracking branch 'origin/master' into fix_foot_center
- fix center position of footstep
- [jsk_footstep_planner] Add service to toggle planning mode
- [jsk_footstep_planner] Check actionlib server connection before sending goal in execute footstep callback
- [jsk_footstep_planner] Do not reset last footstep to connect next footstep plan result correctly in resetMarkerCB
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_planner] Add simple footstep correction scripts
- [jsk_footstep_planner] Add joy_footstep_marker launch, which control footstep_marker from joystick controller
- [jsk_footstep_planner] Add viewer for footstep_planner of JAXON
- [jsk_footstep_planner] Set skip_cropping option true as default
- [jsk_footstep_planner] Add skip_cropping option to toggle whether enabling cropping in pointcloud support check
- [jsk_footstep_planner] Add footstep_planner sample launch for JAXON_RED
- [jsk_footstep_planner] waitForResult in executeFootstepCB and check result status in service callback
- [jsk_footstep_planner] Add get_footstep_marker_pose service to footstep_marker
- [jsk_footstep_planner] Add reset_marker and execute_footstep service to footstep_marker
- Contributors: Iori Kumagai, Kentaro Wada, Shunichi Nozawa, Yohei Kakiuchi
0.1.9 (2016-03-23)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- [jsk_footstep_planner] Add command_pose_stampped to footstep_marker
- [jsk_footstep_planner] Add bbox visalization and check goal status sanity before planning
- [jsk_footstep_planner] Remove points around the robot from robot_center_pointcloud before combine with robot_center_map_origin_points
- [jsk_footstep_planner] Support projection from marker Modified:
- jsk_footstep_planner/include/jsk_footstep_planner/footstep_marker.h
- jsk_footstep_planner/src/footstep_marker.cpp
- Merge pull request #562 from garaemon/collision-avoidance [jsk_footstep_planner] Support collision avoidance in footstep planner
- [jsk_footstep_planner] Support collision check
- [jsk_footstep_planner] Not use im_helpers::add3Dof2DControl for backward compatibility
- [jsk_footstep_marker] Move footstep_marker from jsk_interactive_marker
- [jsk_footstep_planner] Fix genjava problem with
message_generation as build_depend Modified:
- jsk_footstep_planner/package.xml
- [jsk_footstep_planner] Only consider forward step stride in
heuristic estimation Modified:
- jsk_footstep_planner/src/footstep_graph.cpp
- [jsk_footstep_planner] Do not check pointcloud if no perception
mode Modified:
- jsk_footstep_planner/src/footstep_planner.cpp
- [jsk_footstep_controller] Merge heightmap nodelets into multisense_laser nodelet to reduce tf related nodes
- [jsk_footstep_planner] Add successors definitions for jaxon, jaxon_red and hrp2jsknt
- Update .travis to jsk-travis 0.2.1 and enable ccache
- {jsk_calibration, jsk_footstep_planner}/README.md: fix section/subsection
- [jsk_footstep_planner] Measure perception duration in collaborative perception-planning scheduling
- [jsk_footstep_planner] Fix skip_cropping=true behavior
- [jsk_footstep_planner] Remove literal value from benchmark code
- [jsk_footstep_planner] Remove ROBOT env from sample launch files
- Contributors: Kei Okada, Kentaro Wada, Ryohei Ueda, Iori Kumagai
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_footstep_planner] Add &allow-other-keys to fullbody-inverse-kinematics-with-standcoords. You can add :collision-check-robot-link-list and so on
- add variables to modify bounding box height
- [jsk_footstep_planner:footplace_sample]add sample file for footplace_manip
- [jsk_footstep_planner:footplace..]merge origin/master
- [jsk_footstep_planner:footplace~] debug output like normak ik
- fix minor bug in fullbody-inverse-kinematics-with-standcoords
- add args for ik with standcoords
- [jsk_footstep_planner] Ignore Z distance in heuristic computation
- Merge pull request #488 from garaemon/remove-global-variable [jsk_footstep_planner] Remove global variable from footplace planning
- [jsk_footstep_planner] Fix indent of footplace_planner_for_manipulation.l
- [jsk_footstep_planner] Remove global variable from footplace planning
- change name of inverse-reachablity code
- add foot placement coords with ik
- [jsk_footstep_planner] Add script to convert jsk_footstep_msgs/FootstepArray to jsk_recognition_msgs/BoundingBox
- [jsk_footstep_controller] Update footstep planner parameter for hrp2
- [jsk_footstep_planner] Verify global location of footstep in projecting start and goal footstep
- [jsk_footstep_planner] Add global transition limit to verify global location of footstep
- [jsk_footstep_planner/simple_neighbored_graph.h] add missing include string
- change static polygon param
- [jsk_footstep_planner] Do not use jsk_pcl_ros, use jsk_recognition_utils instead of it. These commits are forgotten in previous commit.
- [jsk_footstep_planner] Use jsk_recognition_utils instead of jsk_pcl_ros
- [jsk_footstep_planner] Update stair model to more difficult one
- [jsk_pcl_ros] Fix handling of --enable_lazy_perception and --enable_local_movement options and printout graph info
- [jsk_footstep_planner] Add infoString method to print footstep graph property
- [jsk_pcl_ros] Do not raise exception when cvs has lack data
- [jsk_footstep_planner] Add simple launch file to preview models for benchmarking
- [jsk_footstep_planner] Add --only-save-image option to plotting script
- [jsk_footstep_planner] Add --verbose option to bench_footstep_planner.cpp
- [jsk_footstep_planner] Save to eps figure when visualizing benchmark plot
- [jsk_footstep_planner] build pointcloud model in more wider area
- [jsk_footstep_planner] Check ANNGridCell is already allocated
- [jsk_footstep_planner/bench_footstep_planner] Project start and goal footstep before taking benchmark
- [jsk_footstep_planner] Add anonymous flag to ros::init in benchmark program
- [jsk_footstep_planner] Add several args to disable perception and run planner with hrpsys/gazebo
- [jsk_footstep_planner] Add start-abc button for planner gui using with simulator
- [jsk_footstep_planner] Update benchmark program to specify a lot of parameters
- [jsk_footstep_controller, jsk_teleop_joy] Use footstep-controller.l and lock/unlock furutaractive model during exeucuting footsteps
- [jsk_footstep_planner] Fix indent
- [jsk_footstep_planner] Fix typo: crpping -> cropping
- [jsk_footstep_planner, controller] Add rviz GUI set for playing with footstep planner
- [jsk_footstep_planner] Use odom_init frame to publish plane for unseen region
- [jsk_footstep_controller/footcoords] Add odom_init frame which holds the pose when robot is put on the ground
- [jsk_footstep_planner] Add gaussian pointcloud to pointcloud generator
- Merge pull request #414 from garaemon/default-body-on-odom [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Print error message about projection on rviz
- [jsk_footstep_controller] Add simple-footstep-controller as the most simplest footstep controller using :set-foot-steps
- [jsk_footstep_planner] Check pointcloud is available before projection
- [jsk_footstep_planner] Cleanup heightmap launch files
- Merge remote-tracking branch 'refs/remotes/origin/master' into crosscheck
- [jsk_footstep_planner] Implement cross check
- [jsk_footstep_planner] Add launch file to run footstep planner with heightmap integration
- [jsk_footstep_planner] Add text information on rviz
- [jsk_footstep_planner] Ignore warning message from pcl
- [jsk_footstep_planner] Fix projection around yaw axis orientation
- [jsk_footstep_planner] Add launch file for heightmap mapping
- Merge remote-tracking branch 'refs/remotes/origin/master' into hole-rate Conflicts: jsk_footstep_planner/src/pointcloud_model_generator.cpp
- [jsk_footstep_planner] Add ~hole_rate to simulate hole in pointcloud
- [jsk_footstep_planner] Publish pointcloud periodically from pointcloud_model_generator_node
- [jsk_footstep_planner] Just use kdtree nearest search in checking if footstep is on pointcloud
- [jsk_footstep_planner] add cost_weight and heuristic_weight parameter
- [jsk_footstep_planner] Update pointcloud to show close list and open list during planning
- [jsk_footstep_planner] Check value of transition when expanding nodes
- [jsk_footstep_planner] Use center of footprint to check if footprint is on pointcloud
- [jsk_footstep_planner] Project footprint with local search
- [jsk_footstep_planner] Add projection API to c++ footstep planner
- [jsk_footstep_planner] Add more parmeters to dynamic_reconfigure API of cpp footstep_planner
- [jsk_footstep_planner] Add perception sample with actionlib interface
- [jsk_footstep_planner] Add actionlib interface to C++ version of footstep planner. and add simplest smaple
- [jsk_footstep_planning] Visualize open and close list as pointcloud
- [jsk_footstep_planner] Fix ANNGrid search
- [jsk_footstep_planner] Skip planar region perception if footstep is already on pointcloud
- [jsk_footstep_planner] PointCloud approximate search based on 2-D grid
- [jsk_footstep_planner] Implement local movement if footstep is close to success of projection to pointcloud
- [jsk_footstep_planner] Check pointcloud model supports footprint
- [jsk_footstep_planner] Do not use SVD in perception
- [jsk_footstep_planner] Re-implement footstepHeuristicStepCost in
computationally-efficient way.
- Do not use Eigen::Affine3f::rotation because it calls SVD internally.
2. Do not cast to Eigen::AngleAxisf, just use cos(w/2) to compute angle from quaternion.
- [jsk_footstep_planner] Add profile function interface
- [jsk_footstep_planner] Add script to plot bench result
- [jsk_footstep_planning] Add program to bench footstep planning speed
- [jsk_footstep_planner] Add demonstration of footstep planning over curved and sloped surface
- [jsk_footstep_planner] Fix orientation of projected footstep
- [jsk_footstep_planner] Add timeout argument to solver
- [jsk_footstep_planner] Fix when footstep failed to project on planar region
-
[jsk_footstep_planner] Planning with pointcloud model is implemented. We optimized perception phase by lazy-perception-in-planning technique: 1) Do not detect planar region before planning
2) Do not detect planar region until accurate pose of footstep is required 3) use 2.5D pointcloud to get candidate pointcloud which footstep is placed on
- [jsk_footstep_planner] Add demo for curved surface
- [jsk_footstep_planner] Interactive demo of C++ footstep planner
- [jsk_footstep_planner] Use FootstepStateDiscreteCloseList for close list
- [jsk_footstep_planner] 2D footstep planning is implemented in C++
- [jsk_footstep_planner] Implement FootstepState and projection to pointcloud
- [jsk_footstep_planner] Add demo directory and install headers and library
- [jsk_footstep_planner] Implement C++ a* solver
- [jsk_footstep_planner] Initial commit of cpp graph library
- [jsk_footstep_planner] Update jaxon_red footprint region
- [jsk_footstep_planner, jsk_footstep_controller] Support HRP2JSKNT
- [jsk_footstep_planner, jsk_footstep_controller] Add USE_JOY option
- [jsk_footstep_planner, jsk_footstep_controller] Refactor launch file and add no_recog.launch
- [jsk_footstep_planner] Rename launch file to use ROBOT environment variable
- Contributors: Masaki Murooka, Ryohei Ueda, Yu Ohara, Yuki Furuta, Yusuke Oshiro
0.1.6 (2015-06-11)
- [jsk_footstep_planner] Enable roll paranoid mode
- Merge pull request #327 from garaemon/set-heuristic [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_controller] Fix parameters for jaxon red
- [jsk_footstep_planner] Fix for terrain task
- [jsk_footstep_planner] Add topic interface to project footprint
- [jsk_footstep_planner] Support JAXON_RED
- [jsk_footstep_planner, jsk_footstep_controller] Update for las vegas terrain with jaxon
- [jsk_footstep_planner] Enable roll paranoid mode again
- [jsk_footstep_planner, jsk_footstep_controller] Update for jaxon terrain
- [jsk_footstep_planner] Add simple script to transform frame_id of jsk_footstep_msgs/FootstepArray
- [jsk_footstep_controller] Change gait generator parameters according to plane condition including pitch angle and taking into account if transition is upward or downward
- [jsk_footstep_planner, jsk_footstep_controller] Compute x and y from previous coordinates to detect rolled plane
- [jsk_footstep_planner, jsk_footstep_controller] Support rolling terrain, I hope
- [jsk_footstep_planner, jsk_footstep_controller] Fix typo and update parameter for terrain
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon parameter files
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon footstep planning, Do not merge yet
- [jsk_footstep_planner] locally search reasonable goal when snapping
- [jsk_footstep_planner] Update offset parameter
- [jsk_footstep_planner] Support offset parameter from end coords to center of foot polygon
- [jsk_footstep_planner] Optimize function to remove shadow cells by using local coordinates
- [jsk_footstep_planner] Update projection parameter for slope terrain
- [jsk_footstep_planner] Add ~remove_shadow_cells to add padding to shadow cells
-
[jsk_footstep_planner] Improve planning for different levels: 1. Move successors a little bit when projecting footprint to different level 2. Use footstep coordinate rather than mid-coords of the footstep as goal coordinates
- [jsk_footstep_planner] Check transition limit when planning across diffrent levels
- [jsk_footstep_planner] Add gui-debug symbol and ~toggle_gui_debug service to toggle debug using gui
- [jsk_footstep_planner] Add service API to project pose onto the nearest grid
- [jsk_footstep_planner] More greedy heuristic and compile euslisp code correctly
- [jsk_footstep_planner] Separate successors for same level and transition across different level
- [jsk_footstep_planner] Update successors' parameters
- [jsk_footstep_planner] Check range of grids first in occupancy-grid
- [jsk_footstep_planner] Use glVertexPointer and glDrawArrays to draw occupancy-grid
- [jsk_footstep_planner] Optimize creation of occupancy-grid by using integer-vector rather than hash-table
- [jsk_footstep_planner] Fix bug to compute rotate footstep to snap onto planes
- [jsk_footstep_planner] Update successors parameter
- [jsk_footstep_planner] add geo package to quaternion-from-two-vectors
- [jsk_footstep_planner] Read footstep parameter from file rather than ros parameter
- [jsk_footstep_planner] Use quaternion-from-two-vectors to compute rotate in project-coords-on-to-plane
- [jsk_footstep_planner] Add method to generate occupancy-grid from face
- [jsk_footstep_planner] Use mtimer instead of ros::time-now
- [jsk_footstep_planner] Fix minor bugs
- [jsk_footstep_planner] Memoize projecting grid and re-use it when the planner checks the plane is placable and refactor function names
- [jsk_footstep_planner] Optimize hash size according to cell num
- [jsk_footstep_planner] A lot of improvements on planner
- Fix about orientation of projected footstep
- Lazy evaluation to check if footprint is able to be on grid
- Use mid-coords of footprints to evaluate heuristic
- [jsk_footstep_planner] Do not check if the footstep can be placable on plane across planes
- [jsk_footstep_planner] Support SimpleOccupancyGrid in footstep planner
- [jsk_footstep_planner] Snap geometry_msgs::PoseStamped (from rviz) onto grid map
- [jsk_footstep_planner] Move more functions to footstep_planner_utill.l from footstep_planner.l
- [jsk_footstep_planner] Support color in occupancy-grid class
- [jsk_footstep_planner] Return vertices in global coordinates in :vertices method of occupancy-grid
- [jsk_footstep_planner] Euslisp binding of jsk_recognition_msgs::SimpleOccupancyGrid message
- [jsk_footstep_planner] separate standalone utility functions into footstep_planner_util.l
- [jsk_footstep_planner] Add publisher of polygon of footprint for HRP2JSK
- [jsk_footstep_planner] Add euslisp wrapper to snap footstep on planes
- [jsk_footstep_plannar] Resolve pose of footstep respacted to initial footstep
- [jsk_footstep_plannner] Visualize euslisp footstep on rviz
- [jsk_footstep_planner] Use jsk_recognition_msgs
- Contributors: Ryohei Ueda, Yu Ohara
0.1.5 (2015-01-08)
- renamed make_sumple function
- added make-coords-list function
- added inverse_reachablity_with_given_coords
- Update drcmodel for current planner
- Add sample to compare heuristic functions
- add api to change successor
- Merge remote-tracking branch 'origin/master' into add-breakpoint-text Conflicts: jsk_footstep_controller/euslisp/footstep-controller.l jsk_footstep_controller/launch/hrp2jsknt_real_full.launch
- Add text publishing when checking breakpoint
- Do not allow step over 250mm stride
- Supress x-transition after z-transition. All the threshold is hard-coded
- Update footstep parameter for climing up stairs: larger footstep and smaller footprint
- Add dimensions of footsteps to the result of footstep planner
- Visualize footstep successors
- roseus only needs runtime
- Contributors: Kei Okada, Ryohei Ueda, Yu Ohara
0.1.4 (2014-10-21)
0.1.3 (2014-10-10)
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use lock/unlock service of environment server to lock/unlock the environment during planning
- compile euslisp file before running footstep planner
- publish footstep for visualization from planner
- update usage of env server according to the latest changeset of jsk_recognition
- use env server of jsk_pcl_ros
- ignore emtpy polygon message
- prepend initial steps to the result of the footstep planning
- call x::window-main-onw only if debug is t in jsk_footstep_planner/footstep-planner-node.l
- support 6dof planning
- adding model for footstep planning
- finalize footstep by goal steps
- supporting slope in footstep planning
- update for slope planning
- begins to support slope
- automatically choose the goal footstep
- store goal footstep to the problem class
- supress debug message of footstep planner
- update python scripts for catkin
- load msgs directory
- fix dependency
- keep permission of euslisp codes
- catkinize jsk_footstep_planner
- fix to keep orientation after projection to the planes
- supporting z-direction movement in planning
- supporting timeout of planning
- adding jsk_footstep_planner, euslisp implementation
- Contributors: Ryohei Ueda, Masaki Murooka
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_successors_visualization.launch
- launch/eusplanner/example.launch
- launch/eusplanner/footstep_successors_visualization.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
- [footstep_planner] add local move offset
- [footstep_planner] remove debug message / fix for very short path
- [footstep_planner] add PathCost and Successor function
- [jsk_footstep_planner] add project_footstep service
- [jsk_footstep_planner/config/*footstep_planner_params.yaml] Update HRP2JSKNT, HRP2JSKNTS footstep planner params and add parameter for JAXON.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test] Increase test time to 5 minutes.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.l] Add test for slope and stair
- [jsk_footstep_planner/config/sample_robot_footstep_planner_params.yaml] Update parameters for stair slope test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Dump goal pos rot thre and transition limit
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Use analysis-level coords while IK.
- [footstep_planner] add check collision when validating goal state
- [footstep_planner] add offset for successor test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add euslisp code to generate eus sample robot footstep planner params
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test,.l, config/sample_robot_footstep_planner_params.yaml] Add test for footstep successors and add config parameter for euslisp sample robot. Make default tested robot as sample robot.
- [jsk_footstep_planner/CMakeLists.txt,package.xml] Add footstep planner rostest. roseus dependency is required for message generation.
- [footstep_planner] add check collision when finalizing
- [jsk_footstep_planner/footstep_plnner.cpp] add ROS_INFO for read successors
- Migrate srv files from jsk_pcl_ros to jsk_recognition_msgs see
- [jsk_footstep_planner/footstep_plnner.cpp] fix successor processing using [r/l]leg_offset
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add generator for some footstep planner parameters using robot model
- [jsk_footstep_planner/config/HRP2JSKNT*_footstep_planner_params.yaml] Add hrp2 footstep planner settings.
- [jsk_footstep_planner/config/JAXON_RED_footstep_planner_params.yaml, launch/cppplanner/optimistic_footstep_planner.launch] Move some footstep parameters to parameter files.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch, README, euslisp/footstep-planner-client-sample.l, test/test_footstep_planning_eus_client.test] Use argument ROBOT instead of env ROBOT
- [jsk_footstep_planner/test] Add simple test for footstep_planner
- [jsk_footstep_planner/src/footstep_graph.cpp] isColliding returns false if use obstacle model is true and no obstacles are specified (point cloud size = 0).
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch] Check arg for USE_PERCEPTION for use_lazy_perception
- [jsk_footstep_planner/launch/cppplanner/footstep_planner.rviz,optimistic_footstep_planner.launch] Enable use_obstacle_model and display obstacle model as point cloud.
- [jsk_footstep_planner] update sample (footstep-planner-client-sample.l)
- [heightmap.launch] use jsk_pcl_ros heightmap_converter.launch
- Stop using deprecated jsk_topic_tools/log_utils.h see
- [footstep_planner/footstep_marker] fix offset between end-coords and center of cube
- [jsk_footstep_planner] update launch for JAXON_RED
- [jsk_footstep_planner] Add plane_projection params for footstep_marker
- [jsk_footstep_planner] plane detection should be executed in fixed frame
- [jsk_footstep_planner] enable plane_projection option only when use_footstep_plane_detection is true
- [jsk_footstep_planner] Add launch files for footstep plane detection
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_planner] Use floor_detection to compensate initial z height errors caused by abc odom
- [jsk_footstep_planner] fix bug in FootstepStateDiscreteCloseList, range violation of volume_key
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_planner] Set use_go_pos_server arg true as default
- Add go_pos_server launch option to JAXON_RED footstep laucnh file
- [jsk_footstep_planner] Add rviz launch option to footstep launch file for JAXON_RED
- [jsk_footstep_planner] Add services to wait footstep execution and planning
- [jsk_footstep_planner] Fix transformation in pose stamped command (this transformation should be written by tf2, ideally)
- [jsk_footstep_planner] Set padding options to remove unnecessary points around a robot
- [footstep_planner] add support_padding_x,y
- [footstep_planner] use FootstepParameter for passing parameters
- [footstep_planner] add footstep_parameters.h
- [jsk_footstep_planner] fix parameter names
- [JAXON_RED] add more parameters to JAXON_RED_footstep_planner_perception.launch
- [jsk_footstep_planner] add planning_timeout parameter
- [jsk_footstep_planner] fix local_move and lazy_perception
- [footstep_marker] fix foot coordinates for rotated pose
- [JAXON] adjust parameters for footstep
- [footstep_planner] add parameter default_rfoot_to_lfoot_offset
- use normal for validating footsteps
- Merge remote-tracking branch 'origin/master' into fix_foot_center
- fix center position of footstep
- [jsk_footstep_planner] Add service to toggle planning mode
- [jsk_footstep_planner] Check actionlib server connection before sending goal in execute footstep callback
- [jsk_footstep_planner] Do not reset last footstep to connect next footstep plan result correctly in resetMarkerCB
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_planner] Add simple footstep correction scripts
- [jsk_footstep_planner] Add joy_footstep_marker launch, which control footstep_marker from joystick controller
- [jsk_footstep_planner] Add viewer for footstep_planner of JAXON
- [jsk_footstep_planner] Set skip_cropping option true as default
- [jsk_footstep_planner] Add skip_cropping option to toggle whether enabling cropping in pointcloud support check
- [jsk_footstep_planner] Add footstep_planner sample launch for JAXON_RED
- [jsk_footstep_planner] waitForResult in executeFootstepCB and check result status in service callback
- [jsk_footstep_planner] Add get_footstep_marker_pose service to footstep_marker
- [jsk_footstep_planner] Add reset_marker and execute_footstep service to footstep_marker
- Contributors: Iori Kumagai, Kentaro Wada, Shunichi Nozawa, Yohei Kakiuchi
0.1.9 (2016-03-23)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- [jsk_footstep_planner] Add command_pose_stampped to footstep_marker
- [jsk_footstep_planner] Add bbox visalization and check goal status sanity before planning
- [jsk_footstep_planner] Remove points around the robot from robot_center_pointcloud before combine with robot_center_map_origin_points
- [jsk_footstep_planner] Support projection from marker Modified:
- jsk_footstep_planner/include/jsk_footstep_planner/footstep_marker.h
- jsk_footstep_planner/src/footstep_marker.cpp
- Merge pull request #562 from garaemon/collision-avoidance [jsk_footstep_planner] Support collision avoidance in footstep planner
- [jsk_footstep_planner] Support collision check
- [jsk_footstep_planner] Not use im_helpers::add3Dof2DControl for backward compatibility
- [jsk_footstep_marker] Move footstep_marker from jsk_interactive_marker
- [jsk_footstep_planner] Fix genjava problem with
message_generation as build_depend Modified:
- jsk_footstep_planner/package.xml
- [jsk_footstep_planner] Only consider forward step stride in
heuristic estimation Modified:
- jsk_footstep_planner/src/footstep_graph.cpp
- [jsk_footstep_planner] Do not check pointcloud if no perception
mode Modified:
- jsk_footstep_planner/src/footstep_planner.cpp
- [jsk_footstep_controller] Merge heightmap nodelets into multisense_laser nodelet to reduce tf related nodes
- [jsk_footstep_planner] Add successors definitions for jaxon, jaxon_red and hrp2jsknt
- Update .travis to jsk-travis 0.2.1 and enable ccache
- {jsk_calibration, jsk_footstep_planner}/README.md: fix section/subsection
- [jsk_footstep_planner] Measure perception duration in collaborative perception-planning scheduling
- [jsk_footstep_planner] Fix skip_cropping=true behavior
- [jsk_footstep_planner] Remove literal value from benchmark code
- [jsk_footstep_planner] Remove ROBOT env from sample launch files
- Contributors: Kei Okada, Kentaro Wada, Ryohei Ueda, Iori Kumagai
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_footstep_planner] Add &allow-other-keys to fullbody-inverse-kinematics-with-standcoords. You can add :collision-check-robot-link-list and so on
- add variables to modify bounding box height
- [jsk_footstep_planner:footplace_sample]add sample file for footplace_manip
- [jsk_footstep_planner:footplace..]merge origin/master
- [jsk_footstep_planner:footplace~] debug output like normak ik
- fix minor bug in fullbody-inverse-kinematics-with-standcoords
- add args for ik with standcoords
- [jsk_footstep_planner] Ignore Z distance in heuristic computation
- Merge pull request #488 from garaemon/remove-global-variable [jsk_footstep_planner] Remove global variable from footplace planning
- [jsk_footstep_planner] Fix indent of footplace_planner_for_manipulation.l
- [jsk_footstep_planner] Remove global variable from footplace planning
- change name of inverse-reachablity code
- add foot placement coords with ik
- [jsk_footstep_planner] Add script to convert jsk_footstep_msgs/FootstepArray to jsk_recognition_msgs/BoundingBox
- [jsk_footstep_controller] Update footstep planner parameter for hrp2
- [jsk_footstep_planner] Verify global location of footstep in projecting start and goal footstep
- [jsk_footstep_planner] Add global transition limit to verify global location of footstep
- [jsk_footstep_planner/simple_neighbored_graph.h] add missing include string
- change static polygon param
- [jsk_footstep_planner] Do not use jsk_pcl_ros, use jsk_recognition_utils instead of it. These commits are forgotten in previous commit.
- [jsk_footstep_planner] Use jsk_recognition_utils instead of jsk_pcl_ros
- [jsk_footstep_planner] Update stair model to more difficult one
- [jsk_pcl_ros] Fix handling of --enable_lazy_perception and --enable_local_movement options and printout graph info
- [jsk_footstep_planner] Add infoString method to print footstep graph property
- [jsk_pcl_ros] Do not raise exception when cvs has lack data
- [jsk_footstep_planner] Add simple launch file to preview models for benchmarking
- [jsk_footstep_planner] Add --only-save-image option to plotting script
- [jsk_footstep_planner] Add --verbose option to bench_footstep_planner.cpp
- [jsk_footstep_planner] Save to eps figure when visualizing benchmark plot
- [jsk_footstep_planner] build pointcloud model in more wider area
- [jsk_footstep_planner] Check ANNGridCell is already allocated
- [jsk_footstep_planner/bench_footstep_planner] Project start and goal footstep before taking benchmark
- [jsk_footstep_planner] Add anonymous flag to ros::init in benchmark program
- [jsk_footstep_planner] Add several args to disable perception and run planner with hrpsys/gazebo
- [jsk_footstep_planner] Add start-abc button for planner gui using with simulator
- [jsk_footstep_planner] Update benchmark program to specify a lot of parameters
- [jsk_footstep_controller, jsk_teleop_joy] Use footstep-controller.l and lock/unlock furutaractive model during exeucuting footsteps
- [jsk_footstep_planner] Fix indent
- [jsk_footstep_planner] Fix typo: crpping -> cropping
- [jsk_footstep_planner, controller] Add rviz GUI set for playing with footstep planner
- [jsk_footstep_planner] Use odom_init frame to publish plane for unseen region
- [jsk_footstep_controller/footcoords] Add odom_init frame which holds the pose when robot is put on the ground
- [jsk_footstep_planner] Add gaussian pointcloud to pointcloud generator
- Merge pull request #414 from garaemon/default-body-on-odom [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Print error message about projection on rviz
- [jsk_footstep_controller] Add simple-footstep-controller as the most simplest footstep controller using :set-foot-steps
- [jsk_footstep_planner] Check pointcloud is available before projection
- [jsk_footstep_planner] Cleanup heightmap launch files
- Merge remote-tracking branch 'refs/remotes/origin/master' into crosscheck
- [jsk_footstep_planner] Implement cross check
- [jsk_footstep_planner] Add launch file to run footstep planner with heightmap integration
- [jsk_footstep_planner] Add text information on rviz
- [jsk_footstep_planner] Ignore warning message from pcl
- [jsk_footstep_planner] Fix projection around yaw axis orientation
- [jsk_footstep_planner] Add launch file for heightmap mapping
- Merge remote-tracking branch 'refs/remotes/origin/master' into hole-rate Conflicts: jsk_footstep_planner/src/pointcloud_model_generator.cpp
- [jsk_footstep_planner] Add ~hole_rate to simulate hole in pointcloud
- [jsk_footstep_planner] Publish pointcloud periodically from pointcloud_model_generator_node
- [jsk_footstep_planner] Just use kdtree nearest search in checking if footstep is on pointcloud
- [jsk_footstep_planner] add cost_weight and heuristic_weight parameter
- [jsk_footstep_planner] Update pointcloud to show close list and open list during planning
- [jsk_footstep_planner] Check value of transition when expanding nodes
- [jsk_footstep_planner] Use center of footprint to check if footprint is on pointcloud
- [jsk_footstep_planner] Project footprint with local search
- [jsk_footstep_planner] Add projection API to c++ footstep planner
- [jsk_footstep_planner] Add more parmeters to dynamic_reconfigure API of cpp footstep_planner
- [jsk_footstep_planner] Add perception sample with actionlib interface
- [jsk_footstep_planner] Add actionlib interface to C++ version of footstep planner. and add simplest smaple
- [jsk_footstep_planning] Visualize open and close list as pointcloud
- [jsk_footstep_planner] Fix ANNGrid search
- [jsk_footstep_planner] Skip planar region perception if footstep is already on pointcloud
- [jsk_footstep_planner] PointCloud approximate search based on 2-D grid
- [jsk_footstep_planner] Implement local movement if footstep is close to success of projection to pointcloud
- [jsk_footstep_planner] Check pointcloud model supports footprint
- [jsk_footstep_planner] Do not use SVD in perception
- [jsk_footstep_planner] Re-implement footstepHeuristicStepCost in
computationally-efficient way.
- Do not use Eigen::Affine3f::rotation because it calls SVD internally.
2. Do not cast to Eigen::AngleAxisf, just use cos(w/2) to compute angle from quaternion.
- [jsk_footstep_planner] Add profile function interface
- [jsk_footstep_planner] Add script to plot bench result
- [jsk_footstep_planning] Add program to bench footstep planning speed
- [jsk_footstep_planner] Add demonstration of footstep planning over curved and sloped surface
- [jsk_footstep_planner] Fix orientation of projected footstep
- [jsk_footstep_planner] Add timeout argument to solver
- [jsk_footstep_planner] Fix when footstep failed to project on planar region
-
[jsk_footstep_planner] Planning with pointcloud model is implemented. We optimized perception phase by lazy-perception-in-planning technique: 1) Do not detect planar region before planning
2) Do not detect planar region until accurate pose of footstep is required 3) use 2.5D pointcloud to get candidate pointcloud which footstep is placed on
- [jsk_footstep_planner] Add demo for curved surface
- [jsk_footstep_planner] Interactive demo of C++ footstep planner
- [jsk_footstep_planner] Use FootstepStateDiscreteCloseList for close list
- [jsk_footstep_planner] 2D footstep planning is implemented in C++
- [jsk_footstep_planner] Implement FootstepState and projection to pointcloud
- [jsk_footstep_planner] Add demo directory and install headers and library
- [jsk_footstep_planner] Implement C++ a* solver
- [jsk_footstep_planner] Initial commit of cpp graph library
- [jsk_footstep_planner] Update jaxon_red footprint region
- [jsk_footstep_planner, jsk_footstep_controller] Support HRP2JSKNT
- [jsk_footstep_planner, jsk_footstep_controller] Add USE_JOY option
- [jsk_footstep_planner, jsk_footstep_controller] Refactor launch file and add no_recog.launch
- [jsk_footstep_planner] Rename launch file to use ROBOT environment variable
- Contributors: Masaki Murooka, Ryohei Ueda, Yu Ohara, Yuki Furuta, Yusuke Oshiro
0.1.6 (2015-06-11)
- [jsk_footstep_planner] Enable roll paranoid mode
- Merge pull request #327 from garaemon/set-heuristic [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_controller] Fix parameters for jaxon red
- [jsk_footstep_planner] Fix for terrain task
- [jsk_footstep_planner] Add topic interface to project footprint
- [jsk_footstep_planner] Support JAXON_RED
- [jsk_footstep_planner, jsk_footstep_controller] Update for las vegas terrain with jaxon
- [jsk_footstep_planner] Enable roll paranoid mode again
- [jsk_footstep_planner, jsk_footstep_controller] Update for jaxon terrain
- [jsk_footstep_planner] Add simple script to transform frame_id of jsk_footstep_msgs/FootstepArray
- [jsk_footstep_controller] Change gait generator parameters according to plane condition including pitch angle and taking into account if transition is upward or downward
- [jsk_footstep_planner, jsk_footstep_controller] Compute x and y from previous coordinates to detect rolled plane
- [jsk_footstep_planner, jsk_footstep_controller] Support rolling terrain, I hope
- [jsk_footstep_planner, jsk_footstep_controller] Fix typo and update parameter for terrain
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon parameter files
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon footstep planning, Do not merge yet
- [jsk_footstep_planner] locally search reasonable goal when snapping
- [jsk_footstep_planner] Update offset parameter
- [jsk_footstep_planner] Support offset parameter from end coords to center of foot polygon
- [jsk_footstep_planner] Optimize function to remove shadow cells by using local coordinates
- [jsk_footstep_planner] Update projection parameter for slope terrain
- [jsk_footstep_planner] Add ~remove_shadow_cells to add padding to shadow cells
-
[jsk_footstep_planner] Improve planning for different levels: 1. Move successors a little bit when projecting footprint to different level 2. Use footstep coordinate rather than mid-coords of the footstep as goal coordinates
- [jsk_footstep_planner] Check transition limit when planning across diffrent levels
- [jsk_footstep_planner] Add gui-debug symbol and ~toggle_gui_debug service to toggle debug using gui
- [jsk_footstep_planner] Add service API to project pose onto the nearest grid
- [jsk_footstep_planner] More greedy heuristic and compile euslisp code correctly
- [jsk_footstep_planner] Separate successors for same level and transition across different level
- [jsk_footstep_planner] Update successors' parameters
- [jsk_footstep_planner] Check range of grids first in occupancy-grid
- [jsk_footstep_planner] Use glVertexPointer and glDrawArrays to draw occupancy-grid
- [jsk_footstep_planner] Optimize creation of occupancy-grid by using integer-vector rather than hash-table
- [jsk_footstep_planner] Fix bug to compute rotate footstep to snap onto planes
- [jsk_footstep_planner] Update successors parameter
- [jsk_footstep_planner] add geo package to quaternion-from-two-vectors
- [jsk_footstep_planner] Read footstep parameter from file rather than ros parameter
- [jsk_footstep_planner] Use quaternion-from-two-vectors to compute rotate in project-coords-on-to-plane
- [jsk_footstep_planner] Add method to generate occupancy-grid from face
- [jsk_footstep_planner] Use mtimer instead of ros::time-now
- [jsk_footstep_planner] Fix minor bugs
- [jsk_footstep_planner] Memoize projecting grid and re-use it when the planner checks the plane is placable and refactor function names
- [jsk_footstep_planner] Optimize hash size according to cell num
- [jsk_footstep_planner] A lot of improvements on planner
- Fix about orientation of projected footstep
- Lazy evaluation to check if footprint is able to be on grid
- Use mid-coords of footprints to evaluate heuristic
- [jsk_footstep_planner] Do not check if the footstep can be placable on plane across planes
- [jsk_footstep_planner] Support SimpleOccupancyGrid in footstep planner
- [jsk_footstep_planner] Snap geometry_msgs::PoseStamped (from rviz) onto grid map
- [jsk_footstep_planner] Move more functions to footstep_planner_utill.l from footstep_planner.l
- [jsk_footstep_planner] Support color in occupancy-grid class
- [jsk_footstep_planner] Return vertices in global coordinates in :vertices method of occupancy-grid
- [jsk_footstep_planner] Euslisp binding of jsk_recognition_msgs::SimpleOccupancyGrid message
- [jsk_footstep_planner] separate standalone utility functions into footstep_planner_util.l
- [jsk_footstep_planner] Add publisher of polygon of footprint for HRP2JSK
- [jsk_footstep_planner] Add euslisp wrapper to snap footstep on planes
- [jsk_footstep_plannar] Resolve pose of footstep respacted to initial footstep
- [jsk_footstep_plannner] Visualize euslisp footstep on rviz
- [jsk_footstep_planner] Use jsk_recognition_msgs
- Contributors: Ryohei Ueda, Yu Ohara
0.1.5 (2015-01-08)
- renamed make_sumple function
- added make-coords-list function
- added inverse_reachablity_with_given_coords
- Update drcmodel for current planner
- Add sample to compare heuristic functions
- add api to change successor
- Merge remote-tracking branch 'origin/master' into add-breakpoint-text Conflicts: jsk_footstep_controller/euslisp/footstep-controller.l jsk_footstep_controller/launch/hrp2jsknt_real_full.launch
- Add text publishing when checking breakpoint
- Do not allow step over 250mm stride
- Supress x-transition after z-transition. All the threshold is hard-coded
- Update footstep parameter for climing up stairs: larger footstep and smaller footprint
- Add dimensions of footsteps to the result of footstep planner
- Visualize footstep successors
- roseus only needs runtime
- Contributors: Kei Okada, Ryohei Ueda, Yu Ohara
0.1.4 (2014-10-21)
0.1.3 (2014-10-10)
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use lock/unlock service of environment server to lock/unlock the environment during planning
- compile euslisp file before running footstep planner
- publish footstep for visualization from planner
- update usage of env server according to the latest changeset of jsk_recognition
- use env server of jsk_pcl_ros
- ignore emtpy polygon message
- prepend initial steps to the result of the footstep planning
- call x::window-main-onw only if debug is t in jsk_footstep_planner/footstep-planner-node.l
- support 6dof planning
- adding model for footstep planning
- finalize footstep by goal steps
- supporting slope in footstep planning
- update for slope planning
- begins to support slope
- automatically choose the goal footstep
- store goal footstep to the problem class
- supress debug message of footstep planner
- update python scripts for catkin
- load msgs directory
- fix dependency
- keep permission of euslisp codes
- catkinize jsk_footstep_planner
- fix to keep orientation after projection to the planes
- supporting z-direction movement in planning
- supporting timeout of planning
- adding jsk_footstep_planner, euslisp implementation
- Contributors: Ryohei Ueda, Masaki Murooka
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_successors_visualization.launch
- launch/eusplanner/example.launch
- launch/eusplanner/footstep_successors_visualization.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]
Messages
Services
Plugins
Recent questions tagged jsk_footstep_planner at Robotics Stack Exchange
|
|
jsk_footstep_planner package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-12-09 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Ryohei Ueda
jsk_footstep_planner
How to execute examples
- execute cpp version of footstep planner with Rviz visualization
$ roslaunch jsk_footstep_planner footstep_planner_perception_sample.launch
Use with simulator (gazebo + hrpsys)
roslaunch hrpsys_gazebo_tutorials gazebo_jaxon_no_controllers.launchrtmlaunch hrpsys_gazebo_tutorials jaxon_hrpsys_bringup.launch KINEMATICS_MODE:=trueroslaunch jsk_footstep_planner optimistic_footstep_planner.launch USE_SIMPLE_FOOTSTEP_CONTROLLER:=true GLOBAL_FRAME:=odom USE_PERCEPTION:=false ROBOT:=JAXON_RED
Tips footstep_planner and footstep_marker
-
Footsteps in footstep_planner are represented by a center of a rectangle.
-
Footsteps in footstep_marker are represented by end-coords of robot model.
-
The difference between footstep_planner and footstep_marker can be adjusted by parameters ~lleg_footstep_offset and ~rleg_footstep_offset of footstep_marker
Notice
According to Issue #732, There are 2 types of implementations of footstep_planner in this package. First one is Euslisp implementation and Second one is cpp reimplementation. And first one is not maintained yet.
Changelog for package jsk_footstep_planner
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- run 2to3 -w -f has_key . for python3 check (#776)
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- add from __future_ import print_function
- [jsk_footstep_planner] add an example of footstep planner client with disarranged goal footsteps (#739)
- [jsk_footstep_planner] add num_finalize_steps option to dynamic_reconfigure of jsk_footstep_planner (#741)
- 2to3 -w -fexcept ., 2to3 -w -fprint . (#763)
- add melodic support
(#740)
- [jsk_footstep_planner] fixed returned value of FootstepStateDiscreteCloseList::find()
- [jsk_footstep_planner] fixed a returned value of FootstepStateDiscreteCloseList::find()
- Update README.md and Delete duplicated launch files
(#733)
- [jsk_footstep_planner] Update README.md to fix link to an image.
- [jsk_footstep_planner] add footstep_planner_perception_sample.gif and update README.md to fix syntax error and add an image.
- [jsk_footstep_planner] delete unintentionally duplicated launch files
- [jsk_footstep_planner] update README.md to add notice about euslisp implementation
- [jsk_footstep_planner] update README.md to add description about how to execute examples
- fix heightmap launch so that it can work with nodelet. (#694)
- Contributors: Kei Okada, Koki Shinjo, Riku Shigematsu, Yohei Kakiuchi
0.1.15 (2018-05-16)
- Merge pull request #692 from orikuma/replace-footstep-state-to-state-ptr Replace FootstepState::Ptr to StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- [jsk_footstep_planner] Replace FootstepState::Ptr -> StatePtr in footstep_astar_solver to be used with a GraphT which has different state type
- Contributors: Iori Kumagai, Yohei Kakiuchi
0.1.14 (2018-01-15)
- [jsk_footstep_planner] add grid_path_planner
(#688)
- [jsk_foostep_planner/footstep_marker] add use_default_step_as_goal
- [jsk_foostep_planner/JAXON] update launch (#687)
- Add follow_path heuristic to footstep_planner
(#675)
- [jsk_footstep_planner] remove not used settings from CMakeLists.txt and change order of include
- [jsk_footstep_planner] add set heuristic path service
- [jsk_footstep_planner] update follow_path heuristic
- [jsk_footstep_planner] fix method name
- [jsk_footstep_planner] refine solver
- [jsk_footstep_planner] fix include
- [jsk_footstep_planner] add follow_path heuristic to cfg
- [footstep_planner] add follow_path footstep_planning
- Contributors: Yohei Kakiuchi, Yuki Furuta
0.1.13 (2017-04-18)
- [jsk_footstep_planner, jsk_teleop_joy] add stack mode to footstep_marker
- [jsk_footstep_planner] add pass through filter for creating heightmap (remove points of a ceiling)
- [jsk_footstep_planner] Make initial map_origin_pointcloud smaller
- Contributors: Yohei Kakiuchi
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- [footstep_planner] fix for local_move
- [footstep_planner, JAXON] footstep setting for leptrino foot
- [jsk_footstep_planner] fix offset for project_footstep service
- [footstep_planner] add local move offset
- [footstep_planner] remove debug message / fix for very short path
- [footstep_planner] add PathCost and Successor function
- [jsk_footstep_planner] add project_footstep service
- [jsk_footstep_planner/config/*footstep_planner_params.yaml] Update HRP2JSKNT, HRP2JSKNTS footstep planner params and add parameter for JAXON.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test] Increase test time to 5 minutes.
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.l] Add test for slope and stair
- [jsk_footstep_planner/config/sample_robot_footstep_planner_params.yaml] Update parameters for stair slope test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Dump goal pos rot thre and transition limit
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Use analysis-level coords while IK.
- [footstep_planner] add check collision when validating goal state
- [footstep_planner] add offset for successor test
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add euslisp code to generate eus sample robot footstep planner params
- [jsk_footstep_planner/test/test_footstep_planning_eus_client.test,.l, config/sample_robot_footstep_planner_params.yaml] Add test for footstep successors and add config parameter for euslisp sample robot. Make default tested robot as sample robot.
- [jsk_footstep_planner/CMakeLists.txt,package.xml] Add footstep planner rostest. roseus dependency is required for message generation.
- [footstep_planner] add check collision when finalizing
- [jsk_footstep_planner/footstep_plnner.cpp] add ROS_INFO for read successors
- Migrate srv files from jsk_pcl_ros to jsk_recognition_msgs see
- [jsk_footstep_planner/footstep_plnner.cpp] fix successor processing using [r/l]leg_offset
- [jsk_footstep_planner/euslisp/generate-footstep-planner-parameters-from-robot-model.l] Add generator for some footstep planner parameters using robot model
- [jsk_footstep_planner/config/HRP2JSKNT*_footstep_planner_params.yaml] Add hrp2 footstep planner settings.
- [jsk_footstep_planner/config/JAXON_RED_footstep_planner_params.yaml, launch/cppplanner/optimistic_footstep_planner.launch] Move some footstep parameters to parameter files.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch, README, euslisp/footstep-planner-client-sample.l, test/test_footstep_planning_eus_client.test] Use argument ROBOT instead of env ROBOT
- [jsk_footstep_planner/test] Add simple test for footstep_planner
- [jsk_footstep_planner/src/footstep_graph.cpp] isColliding returns false if use obstacle model is true and no obstacles are specified (point cloud size = 0).
- [jsk_footstep_controller/euslisp/util.l,jsk_footstep_planner/euslisp/footstep-planner-client-sample.l] Move footstep action client utility to util.l and rename functions.
- [jsk_footstep_planner/launch/cppplanner/optimistic_footstep_planner.launch] Check arg for USE_PERCEPTION for use_lazy_perception
- [jsk_footstep_planner/launch/cppplanner/footstep_planner.rviz,optimistic_footstep_planner.launch] Enable use_obstacle_model and display obstacle model as point cloud.
- [jsk_footstep_planner] update sample (footstep-planner-client-sample.l)
- [heightmap.launch] use jsk_pcl_ros heightmap_converter.launch
- Stop using deprecated jsk_topic_tools/log_utils.h see
- [footstep_planner/footstep_marker] fix offset between end-coords and center of cube
- [jsk_footstep_planner] update launch for JAXON_RED
- [jsk_footstep_planner] Add plane_projection params for footstep_marker
- [jsk_footstep_planner] plane detection should be executed in fixed frame
- [jsk_footstep_planner] enable plane_projection option only when use_footstep_plane_detection is true
- [jsk_footstep_planner] Add launch files for footstep plane detection
- [jsk_footstep_controller] Add plane_projection option, which projects footsteps onto subscribed planes
- [jsk_footstep_planner] Use floor_detection to compensate initial z height errors caused by abc odom
- [jsk_footstep_planner] fix bug in FootstepStateDiscreteCloseList, range violation of volume_key
- [jsk_footstep_controller] fix go-pos-server.l
- [jsk_footstep_planner] Set use_go_pos_server arg true as default
- Add go_pos_server launch option to JAXON_RED footstep laucnh file
- [jsk_footstep_planner] Add rviz launch option to footstep launch file for JAXON_RED
- [jsk_footstep_planner] Add services to wait footstep execution and planning
- [jsk_footstep_planner] Fix transformation in pose stamped command (this transformation should be written by tf2, ideally)
- [jsk_footstep_planner] Set padding options to remove unnecessary points around a robot
- [footstep_planner] add support_padding_x,y
- [footstep_planner] use FootstepParameter for passing parameters
- [footstep_planner] add footstep_parameters.h
- [jsk_footstep_planner] fix parameter names
- [JAXON_RED] add more parameters to JAXON_RED_footstep_planner_perception.launch
- [jsk_footstep_planner] add planning_timeout parameter
- [jsk_footstep_planner] fix local_move and lazy_perception
- [footstep_marker] fix foot coordinates for rotated pose
- [JAXON] adjust parameters for footstep
- [footstep_planner] add parameter default_rfoot_to_lfoot_offset
- use normal for validating footsteps
- Merge remote-tracking branch 'origin/master' into fix_foot_center
- fix center position of footstep
- [jsk_footstep_planner] Add service to toggle planning mode
- [jsk_footstep_planner] Check actionlib server connection before sending goal in execute footstep callback
- [jsk_footstep_planner] Do not reset last footstep to connect next footstep plan result correctly in resetMarkerCB
- [jsk_footstep_planner] update footstep_marker for appending footsteps continuously
- [jsk_footstep_planner] Add simple footstep correction scripts
- [jsk_footstep_planner] Add joy_footstep_marker launch, which control footstep_marker from joystick controller
- [jsk_footstep_planner] Add viewer for footstep_planner of JAXON
- [jsk_footstep_planner] Set skip_cropping option true as default
- [jsk_footstep_planner] Add skip_cropping option to toggle whether enabling cropping in pointcloud support check
- [jsk_footstep_planner] Add footstep_planner sample launch for JAXON_RED
- [jsk_footstep_planner] waitForResult in executeFootstepCB and check result status in service callback
- [jsk_footstep_planner] Add get_footstep_marker_pose service to footstep_marker
- [jsk_footstep_planner] Add reset_marker and execute_footstep service to footstep_marker
- Contributors: Iori Kumagai, Kentaro Wada, Shunichi Nozawa, Yohei Kakiuchi
0.1.9 (2016-03-23)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- [jsk_footstep_planner] Add command_pose_stampped to footstep_marker
- [jsk_footstep_planner] Add bbox visalization and check goal status sanity before planning
- [jsk_footstep_planner] Remove points around the robot from robot_center_pointcloud before combine with robot_center_map_origin_points
- [jsk_footstep_planner] Support projection from marker Modified:
- jsk_footstep_planner/include/jsk_footstep_planner/footstep_marker.h
- jsk_footstep_planner/src/footstep_marker.cpp
- Merge pull request #562 from garaemon/collision-avoidance [jsk_footstep_planner] Support collision avoidance in footstep planner
- [jsk_footstep_planner] Support collision check
- [jsk_footstep_planner] Not use im_helpers::add3Dof2DControl for backward compatibility
- [jsk_footstep_marker] Move footstep_marker from jsk_interactive_marker
- [jsk_footstep_planner] Fix genjava problem with
message_generation as build_depend Modified:
- jsk_footstep_planner/package.xml
- [jsk_footstep_planner] Only consider forward step stride in
heuristic estimation Modified:
- jsk_footstep_planner/src/footstep_graph.cpp
- [jsk_footstep_planner] Do not check pointcloud if no perception
mode Modified:
- jsk_footstep_planner/src/footstep_planner.cpp
- [jsk_footstep_controller] Merge heightmap nodelets into multisense_laser nodelet to reduce tf related nodes
- [jsk_footstep_planner] Add successors definitions for jaxon, jaxon_red and hrp2jsknt
- Update .travis to jsk-travis 0.2.1 and enable ccache
- {jsk_calibration, jsk_footstep_planner}/README.md: fix section/subsection
- [jsk_footstep_planner] Measure perception duration in collaborative perception-planning scheduling
- [jsk_footstep_planner] Fix skip_cropping=true behavior
- [jsk_footstep_planner] Remove literal value from benchmark code
- [jsk_footstep_planner] Remove ROBOT env from sample launch files
- Contributors: Kei Okada, Kentaro Wada, Ryohei Ueda, Iori Kumagai
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_footstep_planner] Add &allow-other-keys to fullbody-inverse-kinematics-with-standcoords. You can add :collision-check-robot-link-list and so on
- add variables to modify bounding box height
- [jsk_footstep_planner:footplace_sample]add sample file for footplace_manip
- [jsk_footstep_planner:footplace..]merge origin/master
- [jsk_footstep_planner:footplace~] debug output like normak ik
- fix minor bug in fullbody-inverse-kinematics-with-standcoords
- add args for ik with standcoords
- [jsk_footstep_planner] Ignore Z distance in heuristic computation
- Merge pull request #488 from garaemon/remove-global-variable [jsk_footstep_planner] Remove global variable from footplace planning
- [jsk_footstep_planner] Fix indent of footplace_planner_for_manipulation.l
- [jsk_footstep_planner] Remove global variable from footplace planning
- change name of inverse-reachablity code
- add foot placement coords with ik
- [jsk_footstep_planner] Add script to convert jsk_footstep_msgs/FootstepArray to jsk_recognition_msgs/BoundingBox
- [jsk_footstep_controller] Update footstep planner parameter for hrp2
- [jsk_footstep_planner] Verify global location of footstep in projecting start and goal footstep
- [jsk_footstep_planner] Add global transition limit to verify global location of footstep
- [jsk_footstep_planner/simple_neighbored_graph.h] add missing include string
- change static polygon param
- [jsk_footstep_planner] Do not use jsk_pcl_ros, use jsk_recognition_utils instead of it. These commits are forgotten in previous commit.
- [jsk_footstep_planner] Use jsk_recognition_utils instead of jsk_pcl_ros
- [jsk_footstep_planner] Update stair model to more difficult one
- [jsk_pcl_ros] Fix handling of --enable_lazy_perception and --enable_local_movement options and printout graph info
- [jsk_footstep_planner] Add infoString method to print footstep graph property
- [jsk_pcl_ros] Do not raise exception when cvs has lack data
- [jsk_footstep_planner] Add simple launch file to preview models for benchmarking
- [jsk_footstep_planner] Add --only-save-image option to plotting script
- [jsk_footstep_planner] Add --verbose option to bench_footstep_planner.cpp
- [jsk_footstep_planner] Save to eps figure when visualizing benchmark plot
- [jsk_footstep_planner] build pointcloud model in more wider area
- [jsk_footstep_planner] Check ANNGridCell is already allocated
- [jsk_footstep_planner/bench_footstep_planner] Project start and goal footstep before taking benchmark
- [jsk_footstep_planner] Add anonymous flag to ros::init in benchmark program
- [jsk_footstep_planner] Add several args to disable perception and run planner with hrpsys/gazebo
- [jsk_footstep_planner] Add start-abc button for planner gui using with simulator
- [jsk_footstep_planner] Update benchmark program to specify a lot of parameters
- [jsk_footstep_controller, jsk_teleop_joy] Use footstep-controller.l and lock/unlock furutaractive model during exeucuting footsteps
- [jsk_footstep_planner] Fix indent
- [jsk_footstep_planner] Fix typo: crpping -> cropping
- [jsk_footstep_planner, controller] Add rviz GUI set for playing with footstep planner
- [jsk_footstep_planner] Use odom_init frame to publish plane for unseen region
- [jsk_footstep_controller/footcoords] Add odom_init frame which holds the pose when robot is put on the ground
- [jsk_footstep_planner] Add gaussian pointcloud to pointcloud generator
- Merge pull request #414 from garaemon/default-body-on-odom [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Use body_on_odom frame as robot center frame
- [jsk_footstep_planner] Print error message about projection on rviz
- [jsk_footstep_controller] Add simple-footstep-controller as the most simplest footstep controller using :set-foot-steps
- [jsk_footstep_planner] Check pointcloud is available before projection
- [jsk_footstep_planner] Cleanup heightmap launch files
- Merge remote-tracking branch 'refs/remotes/origin/master' into crosscheck
- [jsk_footstep_planner] Implement cross check
- [jsk_footstep_planner] Add launch file to run footstep planner with heightmap integration
- [jsk_footstep_planner] Add text information on rviz
- [jsk_footstep_planner] Ignore warning message from pcl
- [jsk_footstep_planner] Fix projection around yaw axis orientation
- [jsk_footstep_planner] Add launch file for heightmap mapping
- Merge remote-tracking branch 'refs/remotes/origin/master' into hole-rate Conflicts: jsk_footstep_planner/src/pointcloud_model_generator.cpp
- [jsk_footstep_planner] Add ~hole_rate to simulate hole in pointcloud
- [jsk_footstep_planner] Publish pointcloud periodically from pointcloud_model_generator_node
- [jsk_footstep_planner] Just use kdtree nearest search in checking if footstep is on pointcloud
- [jsk_footstep_planner] add cost_weight and heuristic_weight parameter
- [jsk_footstep_planner] Update pointcloud to show close list and open list during planning
- [jsk_footstep_planner] Check value of transition when expanding nodes
- [jsk_footstep_planner] Use center of footprint to check if footprint is on pointcloud
- [jsk_footstep_planner] Project footprint with local search
- [jsk_footstep_planner] Add projection API to c++ footstep planner
- [jsk_footstep_planner] Add more parmeters to dynamic_reconfigure API of cpp footstep_planner
- [jsk_footstep_planner] Add perception sample with actionlib interface
- [jsk_footstep_planner] Add actionlib interface to C++ version of footstep planner. and add simplest smaple
- [jsk_footstep_planning] Visualize open and close list as pointcloud
- [jsk_footstep_planner] Fix ANNGrid search
- [jsk_footstep_planner] Skip planar region perception if footstep is already on pointcloud
- [jsk_footstep_planner] PointCloud approximate search based on 2-D grid
- [jsk_footstep_planner] Implement local movement if footstep is close to success of projection to pointcloud
- [jsk_footstep_planner] Check pointcloud model supports footprint
- [jsk_footstep_planner] Do not use SVD in perception
- [jsk_footstep_planner] Re-implement footstepHeuristicStepCost in
computationally-efficient way.
- Do not use Eigen::Affine3f::rotation because it calls SVD internally.
2. Do not cast to Eigen::AngleAxisf, just use cos(w/2) to compute angle from quaternion.
- [jsk_footstep_planner] Add profile function interface
- [jsk_footstep_planner] Add script to plot bench result
- [jsk_footstep_planning] Add program to bench footstep planning speed
- [jsk_footstep_planner] Add demonstration of footstep planning over curved and sloped surface
- [jsk_footstep_planner] Fix orientation of projected footstep
- [jsk_footstep_planner] Add timeout argument to solver
- [jsk_footstep_planner] Fix when footstep failed to project on planar region
-
[jsk_footstep_planner] Planning with pointcloud model is implemented. We optimized perception phase by lazy-perception-in-planning technique: 1) Do not detect planar region before planning
2) Do not detect planar region until accurate pose of footstep is required 3) use 2.5D pointcloud to get candidate pointcloud which footstep is placed on
- [jsk_footstep_planner] Add demo for curved surface
- [jsk_footstep_planner] Interactive demo of C++ footstep planner
- [jsk_footstep_planner] Use FootstepStateDiscreteCloseList for close list
- [jsk_footstep_planner] 2D footstep planning is implemented in C++
- [jsk_footstep_planner] Implement FootstepState and projection to pointcloud
- [jsk_footstep_planner] Add demo directory and install headers and library
- [jsk_footstep_planner] Implement C++ a* solver
- [jsk_footstep_planner] Initial commit of cpp graph library
- [jsk_footstep_planner] Update jaxon_red footprint region
- [jsk_footstep_planner, jsk_footstep_controller] Support HRP2JSKNT
- [jsk_footstep_planner, jsk_footstep_controller] Add USE_JOY option
- [jsk_footstep_planner, jsk_footstep_controller] Refactor launch file and add no_recog.launch
- [jsk_footstep_planner] Rename launch file to use ROBOT environment variable
- Contributors: Masaki Murooka, Ryohei Ueda, Yu Ohara, Yuki Furuta, Yusuke Oshiro
0.1.6 (2015-06-11)
- [jsk_footstep_planner] Enable roll paranoid mode
- Merge pull request #327 from garaemon/set-heuristic [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_planner] Add service interface to set heursitic function
- [jsk_footstep_controller] Fix parameters for jaxon red
- [jsk_footstep_planner] Fix for terrain task
- [jsk_footstep_planner] Add topic interface to project footprint
- [jsk_footstep_planner] Support JAXON_RED
- [jsk_footstep_planner, jsk_footstep_controller] Update for las vegas terrain with jaxon
- [jsk_footstep_planner] Enable roll paranoid mode again
- [jsk_footstep_planner, jsk_footstep_controller] Update for jaxon terrain
- [jsk_footstep_planner] Add simple script to transform frame_id of jsk_footstep_msgs/FootstepArray
- [jsk_footstep_controller] Change gait generator parameters according to plane condition including pitch angle and taking into account if transition is upward or downward
- [jsk_footstep_planner, jsk_footstep_controller] Compute x and y from previous coordinates to detect rolled plane
- [jsk_footstep_planner, jsk_footstep_controller] Support rolling terrain, I hope
- [jsk_footstep_planner, jsk_footstep_controller] Fix typo and update parameter for terrain
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon parameter files
- [jsk_footstep_planner, jsk_footstep_controller] Support jaxon footstep planning, Do not merge yet
- [jsk_footstep_planner] locally search reasonable goal when snapping
- [jsk_footstep_planner] Update offset parameter
- [jsk_footstep_planner] Support offset parameter from end coords to center of foot polygon
- [jsk_footstep_planner] Optimize function to remove shadow cells by using local coordinates
- [jsk_footstep_planner] Update projection parameter for slope terrain
- [jsk_footstep_planner] Add ~remove_shadow_cells to add padding to shadow cells
-
[jsk_footstep_planner] Improve planning for different levels: 1. Move successors a little bit when projecting footprint to different level 2. Use footstep coordinate rather than mid-coords of the footstep as goal coordinates
- [jsk_footstep_planner] Check transition limit when planning across diffrent levels
- [jsk_footstep_planner] Add gui-debug symbol and ~toggle_gui_debug service to toggle debug using gui
- [jsk_footstep_planner] Add service API to project pose onto the nearest grid
- [jsk_footstep_planner] More greedy heuristic and compile euslisp code correctly
- [jsk_footstep_planner] Separate successors for same level and transition across different level
- [jsk_footstep_planner] Update successors' parameters
- [jsk_footstep_planner] Check range of grids first in occupancy-grid
- [jsk_footstep_planner] Use glVertexPointer and glDrawArrays to draw occupancy-grid
- [jsk_footstep_planner] Optimize creation of occupancy-grid by using integer-vector rather than hash-table
- [jsk_footstep_planner] Fix bug to compute rotate footstep to snap onto planes
- [jsk_footstep_planner] Update successors parameter
- [jsk_footstep_planner] add geo package to quaternion-from-two-vectors
- [jsk_footstep_planner] Read footstep parameter from file rather than ros parameter
- [jsk_footstep_planner] Use quaternion-from-two-vectors to compute rotate in project-coords-on-to-plane
- [jsk_footstep_planner] Add method to generate occupancy-grid from face
- [jsk_footstep_planner] Use mtimer instead of ros::time-now
- [jsk_footstep_planner] Fix minor bugs
- [jsk_footstep_planner] Memoize projecting grid and re-use it when the planner checks the plane is placable and refactor function names
- [jsk_footstep_planner] Optimize hash size according to cell num
- [jsk_footstep_planner] A lot of improvements on planner
- Fix about orientation of projected footstep
- Lazy evaluation to check if footprint is able to be on grid
- Use mid-coords of footprints to evaluate heuristic
- [jsk_footstep_planner] Do not check if the footstep can be placable on plane across planes
- [jsk_footstep_planner] Support SimpleOccupancyGrid in footstep planner
- [jsk_footstep_planner] Snap geometry_msgs::PoseStamped (from rviz) onto grid map
- [jsk_footstep_planner] Move more functions to footstep_planner_utill.l from footstep_planner.l
- [jsk_footstep_planner] Support color in occupancy-grid class
- [jsk_footstep_planner] Return vertices in global coordinates in :vertices method of occupancy-grid
- [jsk_footstep_planner] Euslisp binding of jsk_recognition_msgs::SimpleOccupancyGrid message
- [jsk_footstep_planner] separate standalone utility functions into footstep_planner_util.l
- [jsk_footstep_planner] Add publisher of polygon of footprint for HRP2JSK
- [jsk_footstep_planner] Add euslisp wrapper to snap footstep on planes
- [jsk_footstep_plannar] Resolve pose of footstep respacted to initial footstep
- [jsk_footstep_plannner] Visualize euslisp footstep on rviz
- [jsk_footstep_planner] Use jsk_recognition_msgs
- Contributors: Ryohei Ueda, Yu Ohara
0.1.5 (2015-01-08)
- renamed make_sumple function
- added make-coords-list function
- added inverse_reachablity_with_given_coords
- Update drcmodel for current planner
- Add sample to compare heuristic functions
- add api to change successor
- Merge remote-tracking branch 'origin/master' into add-breakpoint-text Conflicts: jsk_footstep_controller/euslisp/footstep-controller.l jsk_footstep_controller/launch/hrp2jsknt_real_full.launch
- Add text publishing when checking breakpoint
- Do not allow step over 250mm stride
- Supress x-transition after z-transition. All the threshold is hard-coded
- Update footstep parameter for climing up stairs: larger footstep and smaller footprint
- Add dimensions of footsteps to the result of footstep planner
- Visualize footstep successors
- roseus only needs runtime
- Contributors: Kei Okada, Ryohei Ueda, Yu Ohara
0.1.4 (2014-10-21)
0.1.3 (2014-10-10)
0.1.2 (2014-09-08)
0.1.1 (2014-09-04)
- use lock/unlock service of environment server to lock/unlock the environment during planning
- compile euslisp file before running footstep planner
- publish footstep for visualization from planner
- update usage of env server according to the latest changeset of jsk_recognition
- use env server of jsk_pcl_ros
- ignore emtpy polygon message
- prepend initial steps to the result of the footstep planning
- call x::window-main-onw only if debug is t in jsk_footstep_planner/footstep-planner-node.l
- support 6dof planning
- adding model for footstep planning
- finalize footstep by goal steps
- supporting slope in footstep planning
- update for slope planning
- begins to support slope
- automatically choose the goal footstep
- store goal footstep to the problem class
- supress debug message of footstep planner
- update python scripts for catkin
- load msgs directory
- fix dependency
- keep permission of euslisp codes
- catkinize jsk_footstep_planner
- fix to keep orientation after projection to the planes
- supporting z-direction movement in planning
- supporting timeout of planning
- adding jsk_footstep_planner, euslisp implementation
- Contributors: Ryohei Ueda, Masaki Murooka
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| jsk_footstep_controller |
Launch files
- launch/JAXON_RED_footstep_planner_perception.launch
-
- rviz [default: true]
- use_joy [default: true]
- joy_dev [default: /dev/input/js0]
- use_footstep_marker [default: true]
- use_go_pos_server [default: true]
- use_floor_detection [default: false]
- use_footstep_plane_detection [default: false]
- use_octomap [default: true]
- use_obstacle [default: true]
- use_pointcloud [default: true]
- use_footstep_controller [default: true]
- LAUNCH_TF_BUFFER_SERVER [default: false]
- USE_NORMAL [default: false]
- obstacle_cloud [default: /robot_center_pointcloud_bbox_clipped/output]
- point_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- launch/sample/footstep_planner_marker_sample.launch
- launch/sample/footstep_planner_sample.launch
- launch/sample/model_sample.launch
- launch/sample/footstep_planner_perception_sample.launch
- launch/JAXON_RED_footprint.launch
-
- INPUT_POINTCLOUD
- launch/jaxon_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_correction.launch
-
- use_correction [default: true]
- launch/HRP2JSK_footprint.launch
-
- INPUT_POINTCLOUD
- launch/JAXON_footprint.launch
-
- INPUT_POINTCLOUD
- launch/footstep_successors_visualization.launch
- launch/eusplanner/example.launch
- launch/eusplanner/footstep_successors_visualization.launch
- launch/eusplanner/example_6d.launch
- launch/eusplanner/example_drc_task2.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/eusplanner/example_heuristic.launch
-
- POSE_REMAP [default: /footstep_marker/pose]
- DEV [default: /dev/input/js2]
- launch/footstep_plane_detection.launch
-
- input_cloud [default: /accumulated_heightmap_pointcloud_static/output]
- fixed_frame_id [default: map]
- resolution [default: 0.01]
- SIMULATION [default: false]
- launch/cppplanner/optimistic_footstep_planner.launch
-
- USE_JOY [default: false]
- USE_MARKER [default: true]
- USE_RVIZ [default: true]
- USE_CONTROLLER [default: true]
- USE_PERCEPTION [default: true]
- USE_SIMPLE_FOOTSTEP_CONTROLLER [default: true]
- GLOBAL_FRAME [default: map]
- USE_OBSTACLE_MODEL [default: false]
- ROBOT [default: ]
- FOOTSTEP_PLANNER_PARAM_FILE [default: $(find jsk_footstep_planner)/config/$(arg ROBOT)_footstep_planner_params.yaml]
- POSE_REMAP [default: /move_marker]
- DEV [default: /dev/input/js1]
- launch/heightmap_perception/heightmap.launch
-
- USE_NODELET_MANAGER [default: true]
- NODELET_MANAGER_NAME [default: heightmap_nodelet]
- NODELET_INDEX [default: 0]
- INPUT [default: /distance_filtered_laser_snapshots/output_cloud]
- DEBUG_VIEW [default: true]
- MAXIMUM_Z [default: 2.3]
- MINIMUM_Z [default: -2.0]
- STATIC_FRAME [default: map]
- STAND_FRAME [default: odom_init]
- ROBOT_FRAME [default: body_on_odom]
- PROJECTED_FRAME [default: BODY_on_map]
- USE_PROJECTED_FRAME [default: true]
- STATIC_FRAME [default: $(arg STATIC_FRAME)]
- ROBOT_FRAME [default: $(arg ROBOT_FRAME)]
- PROJECTED_FRAME [default: $(arg PROJECTED_FRAME)]
- USE_PROJECTED_FRAME [default: $(arg USE_PROJECTED_FRAME)]