
|
cis_camera package from cis_camera repocis_camera |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tork-a/cis_camera.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-01-21 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Tokyo Opensource Robotics Kyokai (TORK) Development Team
Authors
- Yosuke Yamamoto
cis_camera 
This package contains ROS driver nodes for CIS Corporation ToF Camera Sensor DCC-RGBD1 with USB 3.0 interface.
System Configurations
- OS / ROS
- Ubuntu 16.04 / ROS Kinetic
- Ubuntu 18.04 / ROS Melodic
- USB 3.0 Port
- CIS ToF Camera Sensor DCC-RGBD1
CIS ToF Camera Sensor DCC-RGBD1
- Camera system
- Dimensions : H:50mm x W:55mm x D:35mm ( Protruding parts are not included )
- Weight : 110 g
- Frame rate : 30 fps
- RGB camera
- 1/3” CMOS image sensor
- Global shutter operation
- QVGA : 1280 x 960
- M12 lens
- Depth / IR camera
- 1/4” CCD image sensor
- VGA : 640 x 480
- M12 lens
- Output : Depth and IR images
- Depth sensing type: ToF ( Time-of-Flight )
- Depth range
- mode 0 : 300 - 5000 mm
- mode 1 : 150 - 700 mm
- NIR light source
- 2 Laser Diodes : 850nm / Class 1
- USB output
- USB 3.0 micro B
- UVC interface
- Images
- RGB : YUV422 - 1920 × 960
- IR : Gray 16bit - 640 × 480
- Depth : Gray 16bit - 640 × 480
- Power source
- DC 12V, 3A

Quick Start
Installation
Installing ROS
Install “ROS Desktop Full” on Ubuntu PC.
- ROS Kinetic for Ubuntu 16.04
- http://wiki.ros.org/kinetic/Installation/Ubuntu
- ROS Melodic for Ubuntu 18.04
- http://wiki.ros.org/melodic/Installation/Ubuntu
Installation of cis_camera
$ source /opt/ros/$ROS_DISTRO/setup.bash
$ mkdir -p ~/camera_ws/src
$ cd ~/camera_ws/src
$ catkin_init_workspace
$ git clone https://github.com/tork-a/cis_camera.git
$ cd ~/camera_ws
$ rosdep install -y -r --from-paths src --ignore-src
$ catkin_make
$ source ~/camera_ws/devel/setup.bash
-
NOTE: Replase
$ROS_DISTROto the ROS distribution of your system,kineticormelodic.
Device Permission Configuration
For the first time you start using CIS ToF camera, run set_udev_rules to set CIS ToF camera device permission configuration with entering sudo password in responce to program input.
$ source ~/camera_ws/devel/setup.bash
$ rosrun cis_camera set_udev_rules
- NOTE : This process is needed only once after the installations on your Ubuntu PC.
Connecting Camera
- Connect the camera to the USB 3.0 port of your Ubuntu PC
- Connect the external power source to the camera and turn it on
- NOTE : It takes about 4 seconds for the camera to start up normally after the external power is turned on.
Launching Software
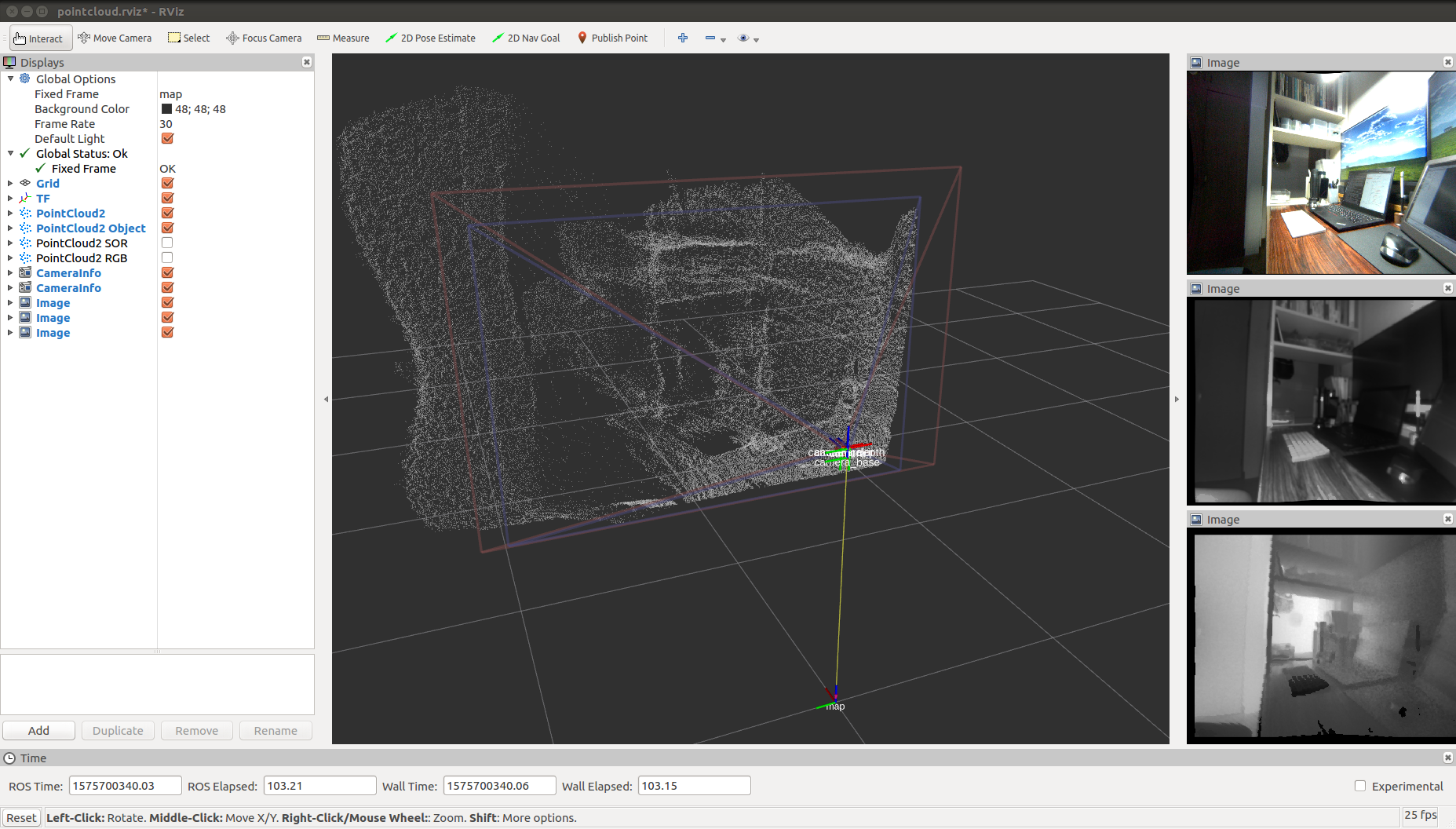
PointCloud
To see the pointcloud with RViz.
$ source ~/camera_ws/devel/setup.bash
$ roslaunch cis_camera pointcloud.launch
This file launches windows of RViz and rqt_reconfigure.
When you do not need to launch rqt_reconfigure,
please set a launch option as below.
$ roslaunch cis_camera pointcloud.launch reconfigure:=false
Launch Options and Default Values of pointcloud.launch
-
rviz:=true- Launching RViz
-
reconfigure:=true- Launching Dynamic Reconfigure
-
camera:=camera- Name of cis_camera for ROS nodes and topics
-
num_worker_threads:=4- Number of threads
-
vendor:=0x2af2- Vendor ID of cis_camera
-
product:=0x1001- Product ID of cis_camera
-
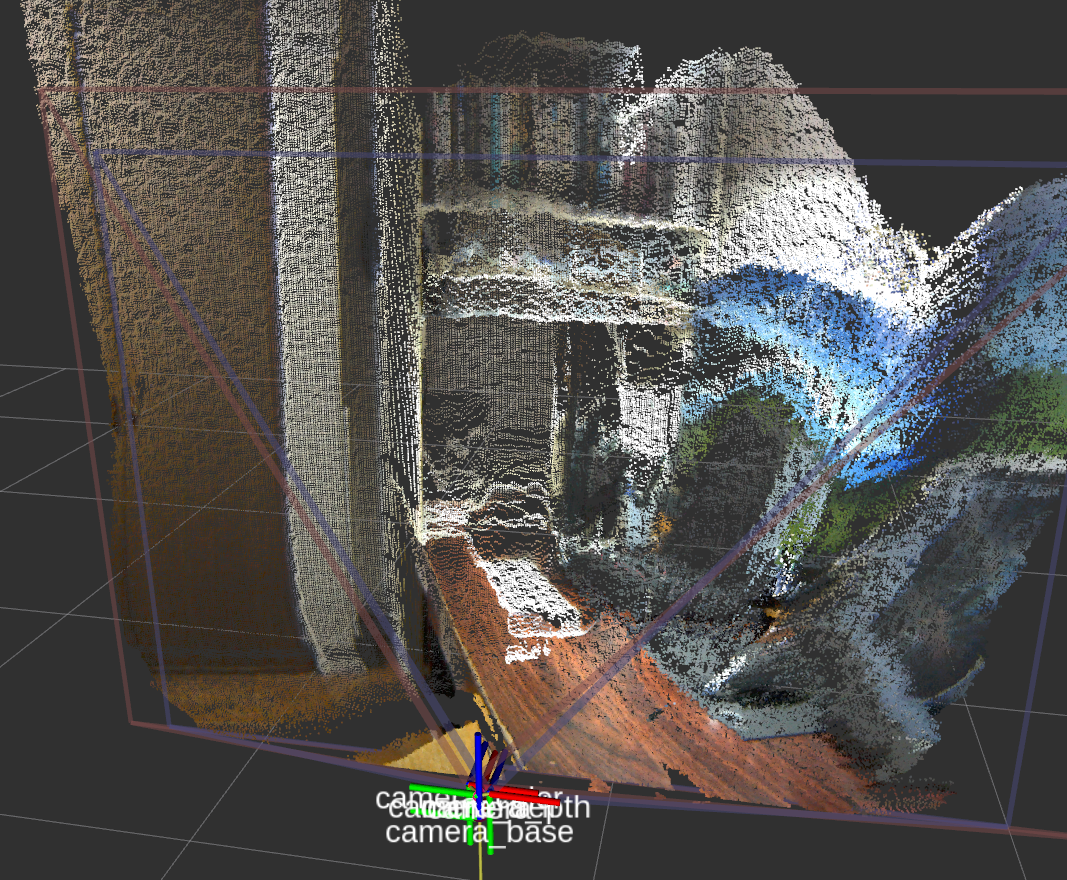
pointcloud_rgb:=false- Projecting RGB colors on the pointcloud
-
flying_pixel_filter:=false- Applying flying pixel filter with PCL
VoxelGridandStatisticalOutlierRemovalfilters
- Applying flying pixel filter with PCL
Publishing Images Only
When you publish only Depth, IR and RGB images, launch tof.launch.
$ source ~/camera_ws/devel/setup.bash
$ roslaunch cis_camera tof.launch
If you show the images, run rqt and open Plugins -> Visualization -> Image View.
$ source ~/camera_ws/devel/setup.bash
$ rqt
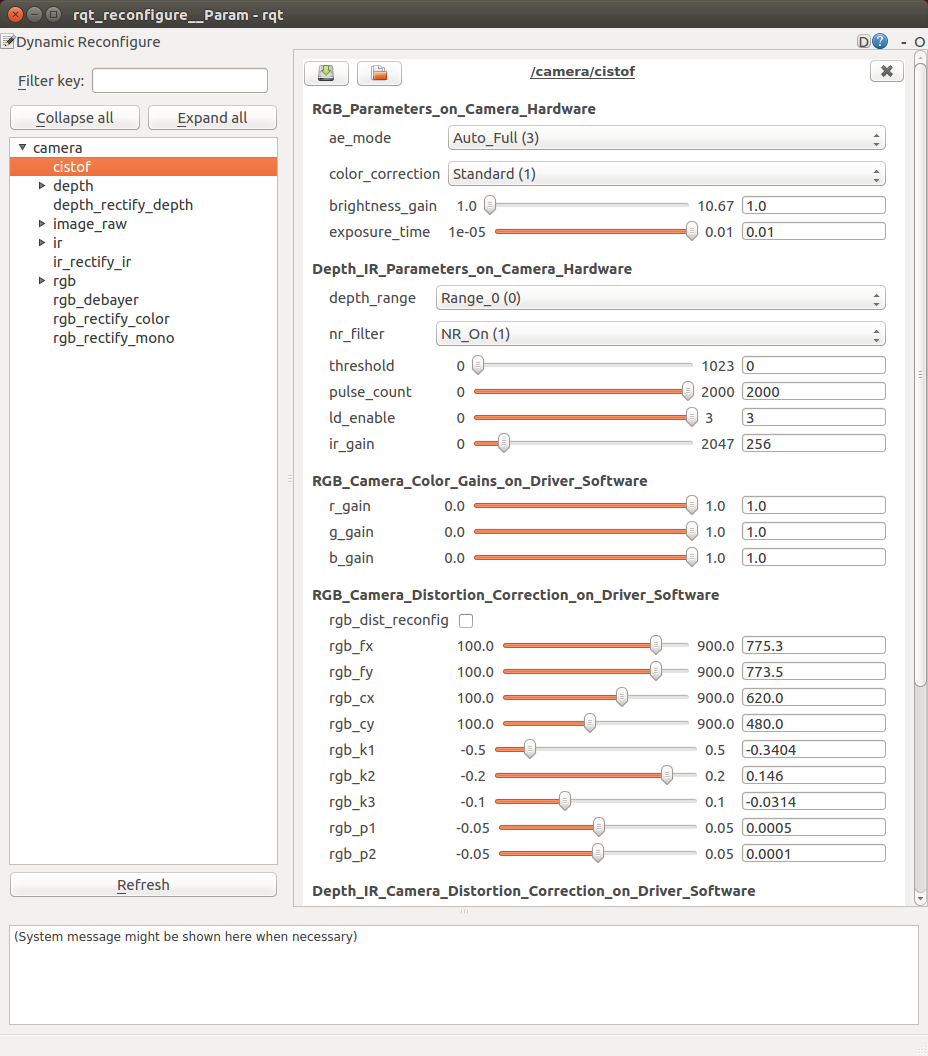
Dynamic Reconfigure
After you launched pointcloud.launch reconfigure:=false or tof.launch,
you can also reconfigure Depth/IR configurations dynamically with launching rqt_reconfigure.
$ source ~/camera_ws/devel/setup.bash
$ rosrun rqt_reconfigure rqt_reconfigure
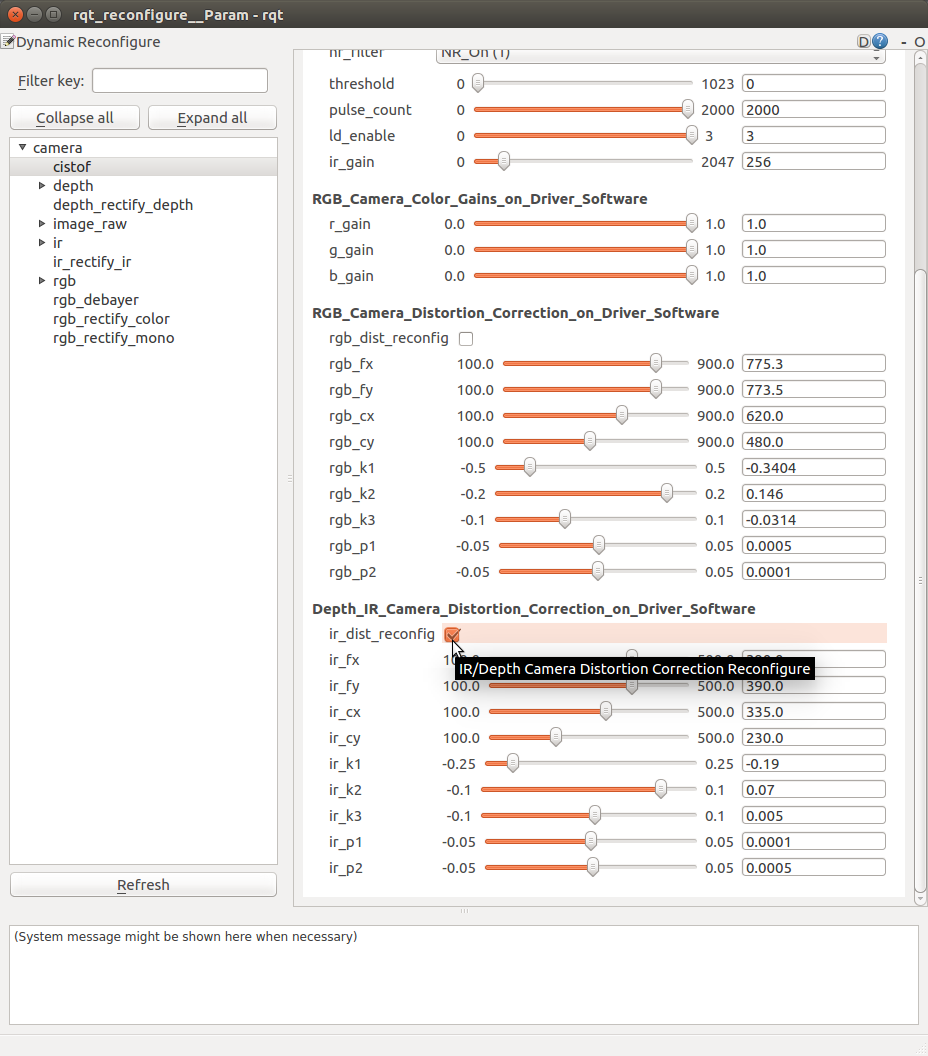
When you reconfigure Depth/IR camera distortion correction parameters,
check ir_dist_reconfig to effect parameters ir_fx, ir_fy and so on.
To set back the parameters to config/camera_ir.yaml data,
uncheck ir_dist_reconfig.
Frame Rate
When you want to know a frame rate of ROS topic, please run rostopic hz as below.
In the case of a topic /camera/depth/points,
$ source ~/camera_ws/devel/setup.bash
$ rostopic hz /camera/depth/points
To find out what topics exits,
$ source ~/camera_ws/devel/setup.bash
$ rostopic list
Point Clud Library (PCL) Sample program
Terminal 1
$ source ~/camera_ws/devel/setup.bash
$ roslaunch cis_camera pointcloud.launch
Terminal 2
$ source ~/camera_ws/devel/setup.bash
$ rosrun cis_camera pcl_example
This PCL example code extracts a target object by filtering the point cloud, calculates the centroid of the extracted point cloud and publishes a TF on the centroid.
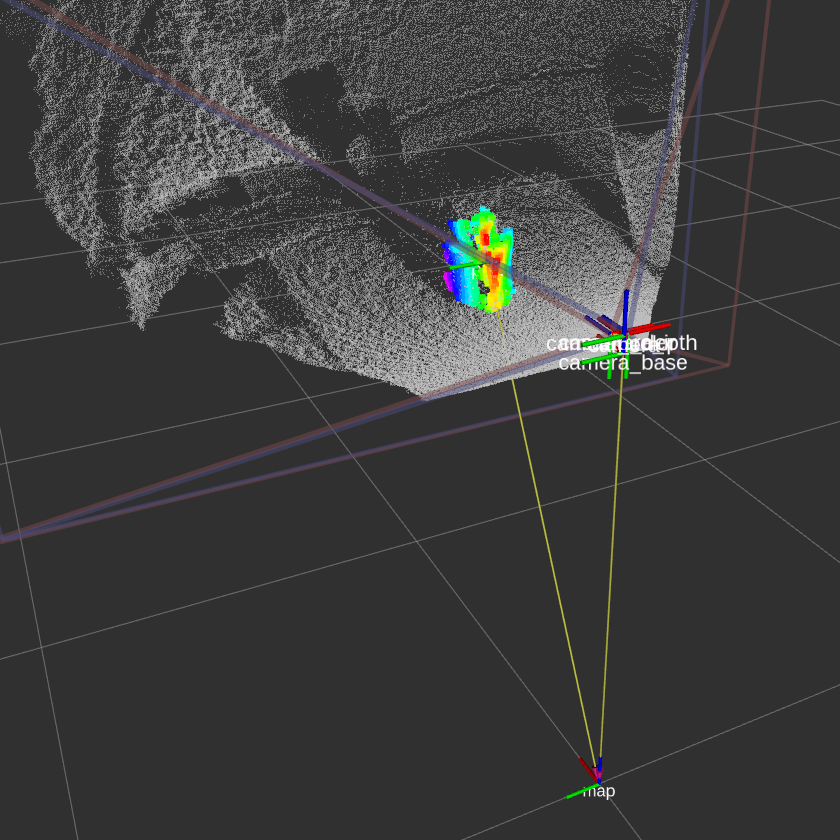
This example is based on “Building a Perception Pipleline” of ROS Industrial Training.
- https://industrial-training-master.readthedocs.io/en/melodic/_source/session5/Building-a-Perception-Pipeline.html
- https://industrial-training-master.readthedocs.io/en/kinetic/_source/session5/Building-a-Perception-Pipeline.html
- https://industrial-training-jp.readthedocs.io/ja/latest/_source/session5_JP/Building-a-Perception-Pipeline_JP.html
Quit Software
Enter Ctrl-C on the running terminal.
Changelog for package cis_camera
0.0.4 (2019-12-11)
- Merge pull request #25 from tork-a/add-comments Add document and comments for document
- add 'Trouble Shooting' in index.rst
- fix style 2 by yy
- fix style
- Merge branch 'add-comments' of https://github.com/tork-a/cis_camera into add-comments
- remove doc/manifest.yaml
- Update index.rst
- mod index.rst format
- mod spec. list
- remove 'Fig.' for captions
- update documant index.rst, add build process for making document pdf file.
- update documents
- mod maintainer as dev@TORK and add author informaiton, add files for documents.
- remove doc/html/ folder
- doc/html generated by rosdoc_lite
- Merge branch 'master' into add-comments
- Merge pull request #24 from tork-a/fix-zero-depth-cnv-gain Fix zero depth cnv gain and add RGB camera info dynamic_reconfigure
- add rgb camera info dynamic_reconfigure
- fix depth_cnv_gain_ getting zero sometimes after the launch.
- Merge pull request #23 from tork-a/add-frame-data-check mod num_worker_threads from 32 to 4, mod unexpected frame data size w…
- mod num_worker_threads from 32 to 4, mod unexpected frame data size warning message.
- Merge pull request #22 from tork-a/add-frame-data-check Add frame data check, mod RGB pointcloud with tf
- add processing.launch.xml for RGB pointcloud with tf
- remove old code lines those are commented out
- add frame data size check to avoid memory segmentation error, add debug mode.
- add comments for documents
- Merge branch 'master' of https://github.com/tork-a/cis_camera into mod-cmakelists
- add tf_conversions in CMakeLists.txt
- Contributors: Tokyo Opensource Robotics Developer 534, Yosuke Yamamoto
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/tof_nodelet.launch
-
- camera [default: camera]
- manager_name [default: manager]
- vendor [default: 0x2af2]
- product [default: 0x1001]
- depth_range [default: 0]
- threshold [default: 0]
- nr_filter [default: 1]
- pulse_count [default: 2000]
- ld_enable [default: 3]
- ir_gain [default: 256]
- ae_mode [default: 3]
- brightness_gain [default: 1.0]
- exposure_time [default: 0.01]
- color_correction [default: 1]
- r_gain [default: 1.0]
- g_gain [default: 1.0]
- b_gain [default: 1.0]
- temp_time [default: 1.0]
- launch/pointcloud.launch
-
- debug [default: false]
- rviz [default: true]
- reconfigure [default: true]
- camera [default: camera]
- num_worker_threads [default: 4]
- vendor [default: 0x2af2]
- product [default: 0x1001]
- depth_range [default: 0]
- threshold [default: 0]
- nr_filter [default: 1]
- pulse_count [default: 2000]
- ld_enable [default: 3]
- ir_gain [default: 256]
- ae_mode [default: 3]
- brightness_gain [default: 1.0]
- exposure_time [default: 0.01]
- color_correction [default: 1]
- r_gain [default: 1.0]
- g_gain [default: 1.0]
- b_gain [default: 1.0]
- temp_time [default: 1.0]
- pointcloud_rgb [default: false]
- flying_pixel_filter [default: false]
- launch/tof.launch
-
- launch_prefix [default: ]
- vendor [default: 0x2af2]
- product [default: 0x1001]
- depth_range [default: 0]
- threshold [default: 0]
- nr_filter [default: 1]
- pulse_count [default: 2000]
- ld_enable [default: 3]
- ir_gain [default: 256]
- ae_mode [default: 3]
- brightness_gain [default: 1.0]
- exposure_time [default: 0.01]
- color_correction [default: 1]
- r_gain [default: 1.0]
- g_gain [default: 1.0]
- b_gain [default: 1.0]
- temp_time [default: 1.0]
- launch/pcl_pipeline_example.launch
- launch/includes/processing.launch.xml
- Load full set of processing nodelets for a RGBD device
-
- manager
- respawn [default: false]
- rgb_processing [default: true]
- debayer_processing [default: true]
- ir_processing [default: true]
- depth_processing [default: true]
- depth_registered_processing [default: true]
- disparity_processing [default: true]
- disparity_registered_processing [default: true]
- sw_registered_processing [default: true]
- hw_registered_processing [default: true]
- rgb [default: rgb]
- ir [default: ir]
- depth [default: depth]
- depth_registered [default: depth_registered]
- depth_registered_filtered [default: depth_registered]
- projector [default: projector]
Messages
Services
Plugins
Recent questions tagged cis_camera at Robotics Stack Exchange
|
|
cis_camera package from cis_camera repocis_camera |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tork-a/cis_camera.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-01-21 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Tokyo Opensource Robotics Kyokai (TORK) Development Team
Authors
- Yosuke Yamamoto
cis_camera
This package contains ROS driver nodes for CIS Corporation ToF Camera Sensor DCC-RGBD1 with USB 3.0 interface.
System Configurations
- OS / ROS
- Ubuntu 16.04 / ROS Kinetic
- Ubuntu 18.04 / ROS Melodic
- USB 3.0 Port
- CIS ToF Camera Sensor DCC-RGBD1
CIS ToF Camera Sensor DCC-RGBD1
- Camera system
- Dimensions : H:50mm x W:55mm x D:35mm ( Protruding parts are not included )
- Weight : 110 g
- Frame rate : 30 fps
- RGB camera
- 1/3” CMOS image sensor
- Global shutter operation
- QVGA : 1280 x 960
- M12 lens
- Depth / IR camera
- 1/4” CCD image sensor
- VGA : 640 x 480
- M12 lens
- Output : Depth and IR images
- Depth sensing type: ToF ( Time-of-Flight )
- Depth range
- mode 0 : 300 - 5000 mm
- mode 1 : 150 - 700 mm
- NIR light source
- 2 Laser Diodes : 850nm / Class 1
- USB output
- USB 3.0 micro B
- UVC interface
- Images
- RGB : YUV422 - 1920 × 960
- IR : Gray 16bit - 640 × 480
- Depth : Gray 16bit - 640 × 480
- Power source
- DC 12V, 3A
Quick Start
Installation
Installing ROS
Install “ROS Desktop Full” on Ubuntu PC.
- ROS Kinetic for Ubuntu 16.04
- http://wiki.ros.org/kinetic/Installation/Ubuntu
- ROS Melodic for Ubuntu 18.04
- http://wiki.ros.org/melodic/Installation/Ubuntu
Installation of cis_camera
$ source /opt/ros/$ROS_DISTRO/setup.bash
$ mkdir -p ~/camera_ws/src
$ cd ~/camera_ws/src
$ catkin_init_workspace
$ git clone https://github.com/tork-a/cis_camera.git
$ cd ~/camera_ws
$ rosdep install -y -r --from-paths src --ignore-src
$ catkin_make
$ source ~/camera_ws/devel/setup.bash
-
NOTE: Replase
$ROS_DISTROto the ROS distribution of your system,kineticormelodic.
Device Permission Configuration
For the first time you start using CIS ToF camera, run set_udev_rules to set CIS ToF camera device permission configuration with entering sudo password in responce to program input.
$ source ~/camera_ws/devel/setup.bash
$ rosrun cis_camera set_udev_rules
- NOTE : This process is needed only once after the installations on your Ubuntu PC.
Connecting Camera
- Connect the camera to the USB 3.0 port of your Ubuntu PC
- Connect the external power source to the camera and turn it on
- NOTE : It takes about 4 seconds for the camera to start up normally after the external power is turned on.
Launching Software
PointCloud
To see the pointcloud with RViz.
$ source ~/camera_ws/devel/setup.bash
$ roslaunch cis_camera pointcloud.launch
This file launches windows of RViz and rqt_reconfigure.
When you do not need to launch rqt_reconfigure,
please set a launch option as below.
$ roslaunch cis_camera pointcloud.launch reconfigure:=false
Launch Options and Default Values of pointcloud.launch
-
rviz:=true- Launching RViz
-
reconfigure:=true- Launching Dynamic Reconfigure
-
camera:=camera- Name of cis_camera for ROS nodes and topics
-
num_worker_threads:=4- Number of threads
-
vendor:=0x2af2- Vendor ID of cis_camera
-
product:=0x1001- Product ID of cis_camera
-
pointcloud_rgb:=false- Projecting RGB colors on the pointcloud
-
flying_pixel_filter:=false- Applying flying pixel filter with PCL
VoxelGridandStatisticalOutlierRemovalfilters
- Applying flying pixel filter with PCL
Publishing Images Only
When you publish only Depth, IR and RGB images, launch tof.launch.
$ source ~/camera_ws/devel/setup.bash
$ roslaunch cis_camera tof.launch
If you show the images, run rqt and open Plugins -> Visualization -> Image View.
$ source ~/camera_ws/devel/setup.bash
$ rqt
Dynamic Reconfigure
After you launched pointcloud.launch reconfigure:=false or tof.launch,
you can also reconfigure Depth/IR configurations dynamically with launching rqt_reconfigure.
$ source ~/camera_ws/devel/setup.bash
$ rosrun rqt_reconfigure rqt_reconfigure
When you reconfigure Depth/IR camera distortion correction parameters,
check ir_dist_reconfig to effect parameters ir_fx, ir_fy and so on.
To set back the parameters to config/camera_ir.yaml data,
uncheck ir_dist_reconfig.
Frame Rate
When you want to know a frame rate of ROS topic, please run rostopic hz as below.
In the case of a topic /camera/depth/points,
$ source ~/camera_ws/devel/setup.bash
$ rostopic hz /camera/depth/points
To find out what topics exits,
$ source ~/camera_ws/devel/setup.bash
$ rostopic list
Point Clud Library (PCL) Sample program
Terminal 1
$ source ~/camera_ws/devel/setup.bash
$ roslaunch cis_camera pointcloud.launch
Terminal 2
$ source ~/camera_ws/devel/setup.bash
$ rosrun cis_camera pcl_example
This PCL example code extracts a target object by filtering the point cloud, calculates the centroid of the extracted point cloud and publishes a TF on the centroid.
This example is based on “Building a Perception Pipleline” of ROS Industrial Training.
- https://industrial-training-master.readthedocs.io/en/melodic/_source/session5/Building-a-Perception-Pipeline.html
- https://industrial-training-master.readthedocs.io/en/kinetic/_source/session5/Building-a-Perception-Pipeline.html
- https://industrial-training-jp.readthedocs.io/ja/latest/_source/session5_JP/Building-a-Perception-Pipeline_JP.html
Quit Software
Enter Ctrl-C on the running terminal.
Changelog for package cis_camera
0.0.4 (2019-12-11)
- Merge pull request #25 from tork-a/add-comments Add document and comments for document
- add 'Trouble Shooting' in index.rst
- fix style 2 by yy
- fix style
- Merge branch 'add-comments' of https://github.com/tork-a/cis_camera into add-comments
- remove doc/manifest.yaml
- Update index.rst
- mod index.rst format
- mod spec. list
- remove 'Fig.' for captions
- update documant index.rst, add build process for making document pdf file.
- update documents
- mod maintainer as dev@TORK and add author informaiton, add files for documents.
- remove doc/html/ folder
- doc/html generated by rosdoc_lite
- Merge branch 'master' into add-comments
- Merge pull request #24 from tork-a/fix-zero-depth-cnv-gain Fix zero depth cnv gain and add RGB camera info dynamic_reconfigure
- add rgb camera info dynamic_reconfigure
- fix depth_cnv_gain_ getting zero sometimes after the launch.
- Merge pull request #23 from tork-a/add-frame-data-check mod num_worker_threads from 32 to 4, mod unexpected frame data size w…
- mod num_worker_threads from 32 to 4, mod unexpected frame data size warning message.
- Merge pull request #22 from tork-a/add-frame-data-check Add frame data check, mod RGB pointcloud with tf
- add processing.launch.xml for RGB pointcloud with tf
- remove old code lines those are commented out
- add frame data size check to avoid memory segmentation error, add debug mode.
- add comments for documents
- Merge branch 'master' of https://github.com/tork-a/cis_camera into mod-cmakelists
- add tf_conversions in CMakeLists.txt
- Contributors: Tokyo Opensource Robotics Developer 534, Yosuke Yamamoto
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/tof_nodelet.launch
-
- camera [default: camera]
- manager_name [default: manager]
- vendor [default: 0x2af2]
- product [default: 0x1001]
- depth_range [default: 0]
- threshold [default: 0]
- nr_filter [default: 1]
- pulse_count [default: 2000]
- ld_enable [default: 3]
- ir_gain [default: 256]
- ae_mode [default: 3]
- brightness_gain [default: 1.0]
- exposure_time [default: 0.01]
- color_correction [default: 1]
- r_gain [default: 1.0]
- g_gain [default: 1.0]
- b_gain [default: 1.0]
- temp_time [default: 1.0]
- launch/pointcloud.launch
-
- debug [default: false]
- rviz [default: true]
- reconfigure [default: true]
- camera [default: camera]
- num_worker_threads [default: 4]
- vendor [default: 0x2af2]
- product [default: 0x1001]
- depth_range [default: 0]
- threshold [default: 0]
- nr_filter [default: 1]
- pulse_count [default: 2000]
- ld_enable [default: 3]
- ir_gain [default: 256]
- ae_mode [default: 3]
- brightness_gain [default: 1.0]
- exposure_time [default: 0.01]
- color_correction [default: 1]
- r_gain [default: 1.0]
- g_gain [default: 1.0]
- b_gain [default: 1.0]
- temp_time [default: 1.0]
- pointcloud_rgb [default: false]
- flying_pixel_filter [default: false]
- launch/tof.launch
-
- launch_prefix [default: ]
- vendor [default: 0x2af2]
- product [default: 0x1001]
- depth_range [default: 0]
- threshold [default: 0]
- nr_filter [default: 1]
- pulse_count [default: 2000]
- ld_enable [default: 3]
- ir_gain [default: 256]
- ae_mode [default: 3]
- brightness_gain [default: 1.0]
- exposure_time [default: 0.01]
- color_correction [default: 1]
- r_gain [default: 1.0]
- g_gain [default: 1.0]
- b_gain [default: 1.0]
- temp_time [default: 1.0]
- launch/pcl_pipeline_example.launch
- launch/includes/processing.launch.xml
- Load full set of processing nodelets for a RGBD device
-
- manager
- respawn [default: false]
- rgb_processing [default: true]
- debayer_processing [default: true]
- ir_processing [default: true]
- depth_processing [default: true]
- depth_registered_processing [default: true]
- disparity_processing [default: true]
- disparity_registered_processing [default: true]
- sw_registered_processing [default: true]
- hw_registered_processing [default: true]
- rgb [default: rgb]
- ir [default: ir]
- depth [default: depth]
- depth_registered [default: depth_registered]
- depth_registered_filtered [default: depth_registered]
- projector [default: projector]