
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.15 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-07 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
BT Navigator
The BT Navigator (Behavior Tree Navigator) module implements the NavigateToPose and NavigateThroughPoses task interfaces. It is a Behavior Tree-based implementation of navigation that is intended to allow for flexibility in the navigation task and provide a way to easily specify complex robot behaviors.
See its Configuration Guide Page for additional parameter descriptions, as well as the Nav2 Behavior Tree Explanation pages explaining more context on the default behavior trees and examples provided in this package.
Overview
The BT Navigator receives a goal pose and navigates the robot to the specified destination(s). To do so, the module reads an XML description of the Behavior Tree from a file, as specified by a Node parameter, and passes that to a generic BehaviorTreeEngine class which uses the Behavior-Tree.CPP library to dynamically create and execute the BT. The BT XML can also be specified on a per-task basis so that your robot may have many different types of navigation or autonomy behaviors on a per-task basis.
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| navigation2 | github-ros-planning-navigation2 |
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_bt_navigator at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.2.9 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-07-09 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
BT Navigator
The BT Navigator (Behavior Tree Navigator) module implements the NavigateToPose and NavigateThroughPoses task interfaces. It is a Behavior Tree-based implementation of navigation that is intended to allow for flexibility in the navigation task and provide a way to easily specify complex robot behaviors.
See its Configuration Guide Page for additional parameter descriptions, as well as the Nav2 Behavior Tree Explanation pages explaining more context on the default behavior trees and examples provided in this package.
Overview
The BT Navigator receives a goal pose and navigates the robot to the specified destination(s). To do so, the module reads an XML description of the Behavior Tree from a file, as specified by a Node parameter, and passes that to a generic BehaviorTreeEngine class which uses the Behavior-Tree.CPP library to dynamically create and execute the BT. The BT XML can also be specified on a per-task basis so that your robot may have many different types of navigation or autonomy behaviors on a per-task basis.
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| navigation2 | github-ros-planning-navigation2 |
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_bt_navigator at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.3.1 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2024-07-24 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
BT Navigator
The BT Navigator (Behavior Tree Navigator) module implements the NavigateToPose and NavigateThroughPoses task interfaces. It is a Behavior Tree-based implementation of navigation that is intended to allow for flexibility in the navigation task and provide a way to easily specify complex robot behaviors.
See its Configuration Guide Page for additional parameter descriptions, as well as the Nav2 Behavior Tree Explanation pages explaining more context on the default behavior trees and examples provided in this package.
Overview
The BT Navigator receives a goal pose and navigates the robot to the specified destination(s). To do so, the module reads an XML description of the Behavior Tree from a file, as specified by a Node parameter, and passes that to a generic BehaviorTreeEngine class which uses the Behavior-Tree.CPP library to dynamically create and execute the BT. The BT XML can also be specified on a per-task basis so that your robot may have many different types of navigation or autonomy behaviors on a per-task basis.
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| navigation2 | github-ros-planning-navigation2 |
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_bt_navigator at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.7 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | crystal-devel |
| Last Updated | 2019-03-13 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
BT Navigator
The BT Navigator (Behavior Tree Navigator) module implements the NavigateToPose task interface. It is a Behavior Tree-based implementation of navigation that is intended to allow for flexibility in the navigation task and provide a way to easily specify complex robot behaviors, including recovery.
Overview
The BT Navigator receives a goal pose and navigates the robot to the specified destination. To do so, the module reads an XML description of the Behavior Tree from a file, as specified by a Node parameter, and passes that to a generic BehaviorTreeEngine class which uses the Behavior-Tree.CPP library to dynamically create and execute the BT.
Specifying an input XML file
The BtNavigator node has a parameter, bt_xml_filename, that can be specified using a ROS2 parameters YAML file, like this:
BtNavigator:
ros__parameters:
bt_xml_filename: <path-to-xml-file>
Using the XML filename as a parameter makes it easy to change or extend the logic used for navigation. Once can simply update the XML description for the BT and the BtNavigator task server will use the new description.
Navigation Behavior Trees
The BT Navigator package has a few sample XML-based descriptions of BTs.
Simple sequential invocation of planning and control
Simple_sequential.xml implements a basic navigation by first computing the path and then following the path.
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<SequenceStar name="root">
<ComputePathToPose goal="${goal}" path="${path}"/>
<FollowPath path="${path}"/>
</SequenceStar>
</BehaviorTree>
</root>
The graphical version of this Behavior Tree:

ComputePathToPose gets the incoming goal pose from the blackboard, computes the path and puts the result back on the blackboard, where FollowPath picks it up.
Parallel planning and control
An alternative approach is to run planning and control in parallel. Parallel.xml implements one possible BT for doing this:
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<SequenceStar name="root">
<ComputePathToPose goal="${goal}" path="${path}"/>
<ParallelNode threshold="1">
<FollowPath path="${path}"/>
<Sequence>
<RateController hz="1.0">
<ComputePathToPose goal="${goal}" path="${path}"/>
</RateController>
<UpdatePath/>
</Sequence>
</ParallelNode>
</SequenceStar>
</BehaviorTree>
</root>
The graphical version of this Behavior Tree:

In this case, the BT first calls ComputePathToPose to generate an initial path. It then runs FollowPath and a rate-controlled ComputePathToPose in parallel. The RateController node specifies how frequently the ComputePathToPose task should be invoked. Each time a new path is computed, it is sent to the local planner/controller using UpdatePath.
Recovery Behavior Trees
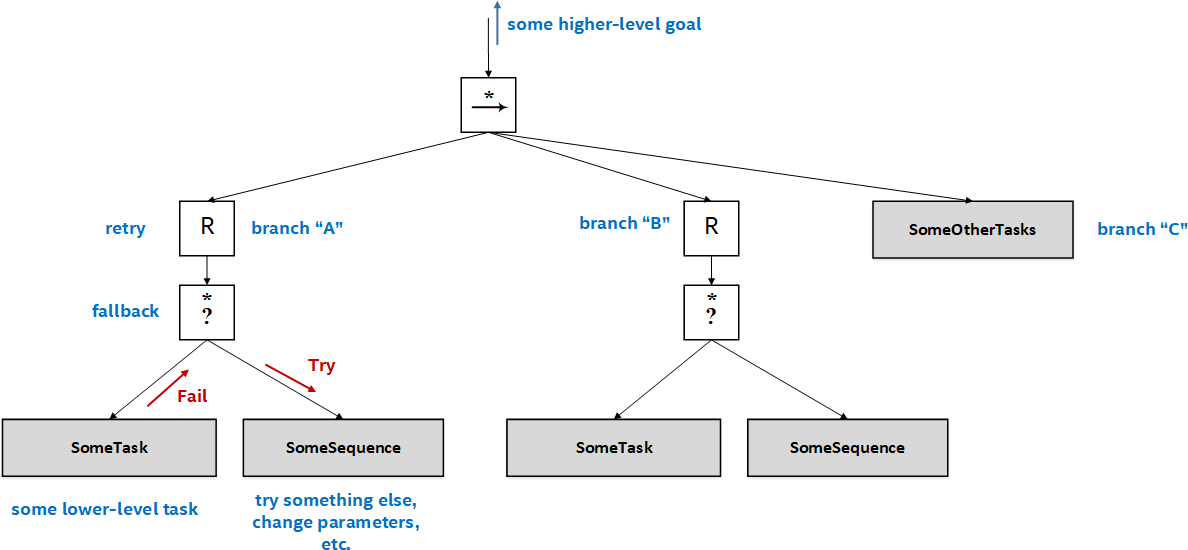
With Behavior Trees, a recovery pattern can be implemented using fallback and recovery nodes. For example, on the diagram below, branch "A" contains a retry node R in series with a fallback node ?*. If the leaf node SomeTask returns Fail, the fallback node will tick SomeSequence which could execute an alternative approach to accomplish the task. If SomeSequence also returns Fail, the retry node will tick again the "A" branch before returning Fail to the parent node. This pattern can be used for any number of tasks, as shown for branches "B" and "C".
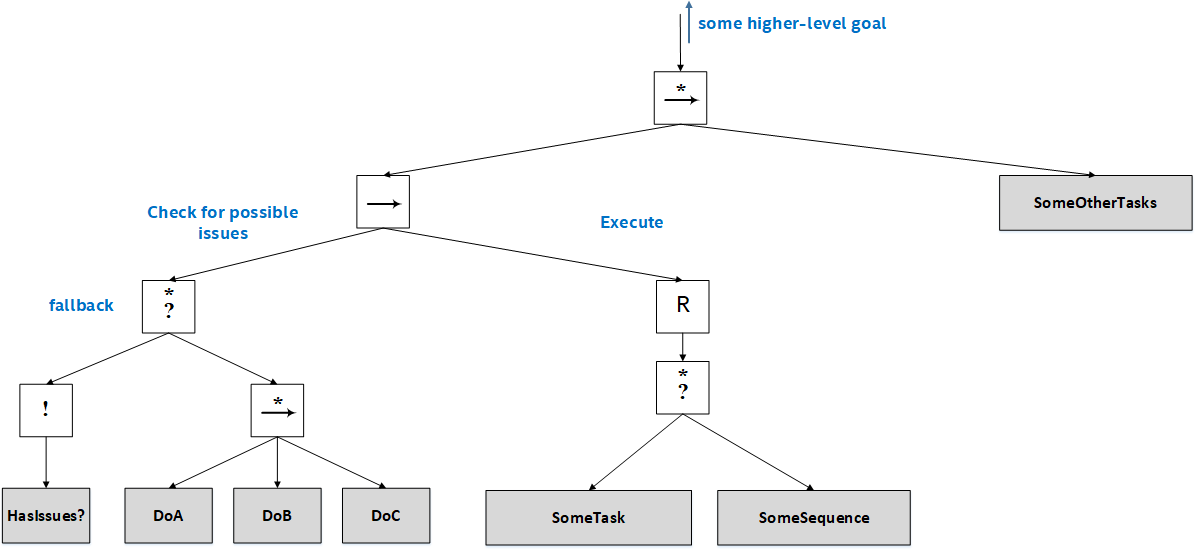
The pattern described above can be extended to check for preconditions before attempting SomeTask. For example, the BT below will initially tick the node leaf HasIssues?. If it returns Fail, meaning it failed to detect the issue, the inverter ! will report Success and SomeTask will be ticked (after ticking its parent nodes). However, if it returns Success, meaning it did detect an issue, a sequence of nodes DoA, DoB, DoC will be ticked, which possibly execute a sequence of corrective actions. Notice that if any of these report Fail it will propagate to the root node possibly halting execution.
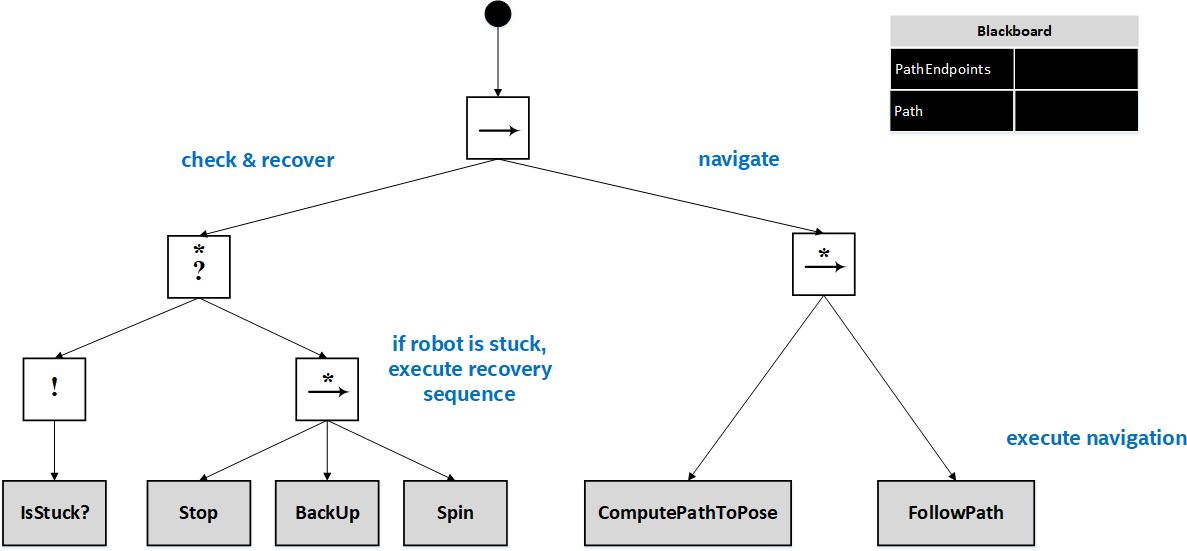
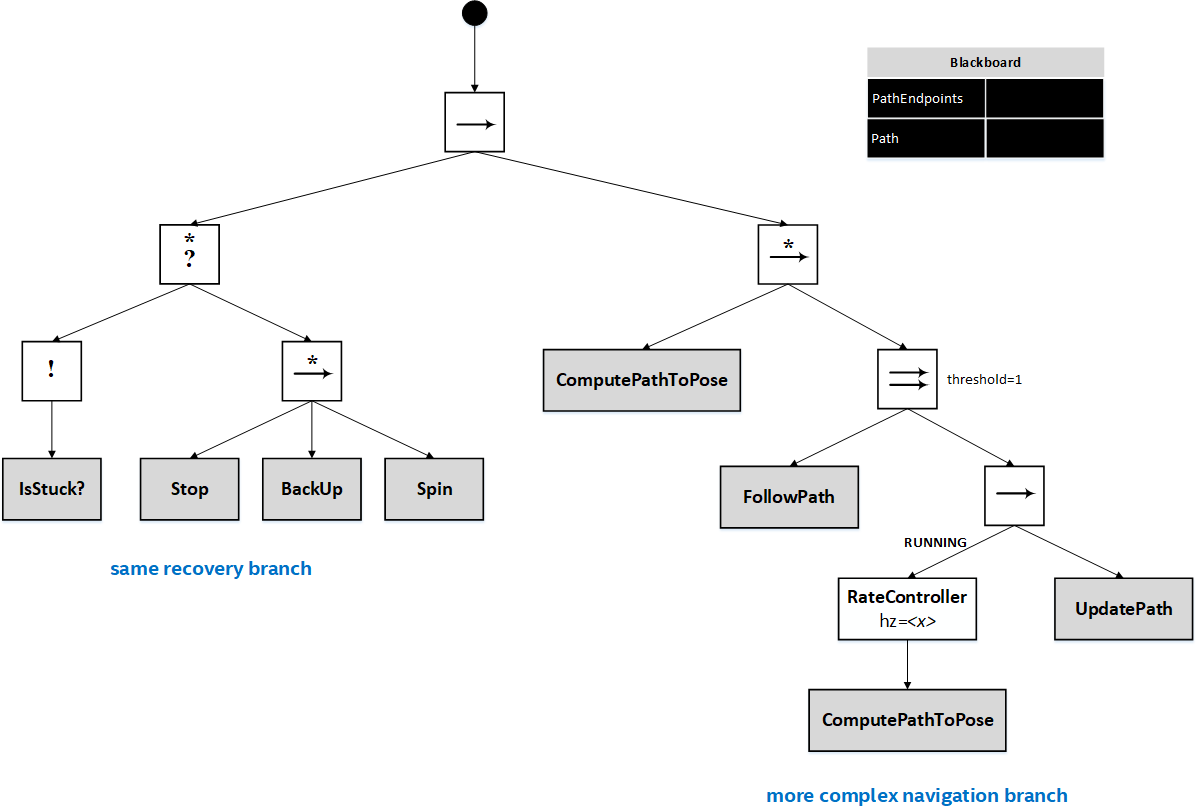
There are versions of the navigation BTs, simple_sequential_w_recovery.xml and parallel_w_recovery.xml that add recovery sub-trees to the navigation task.
For example, in the simple_sequential version, there is node, IsStuck that checks whether the robot is no longer making progress toward its goal pose. If this condition is detected, a few maneuvers - Stop, BackUp, and Spin - are executed to attempt to free up the robot.
And in the parallel version, only the navigation branch is modified while the recovery branch remains the same. Notice how this allows for independent development.
AutoLocalization Behavior Tree
Warning: AutoLocalization actuates robot; currently, obstacle avoidance has not been integrated into this feature. The user is advised to not use this feature on a physical robot for safety reasons. As of now, this feature should only be used in simulations.
auto_localization.xml Allows differential type robot to automatically localize its initial position when Nav Goal command is given to the robot without the initial pose.
Below is the xml representation of the tree.
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<FallbackStar name="root_AutoLocalization">
<initialPoseReceived/>
<SequenceStar name="doSelfLocalization">
<RetryUntilSuccesful num_attempts="5" name="retry_client_request">
<globalLocalizationServiceRequest/>
</RetryUntilSuccesful>
<RetryUntilSuccesful num_attempts="10" name="retry_localization">
<Sequence>
<Fallback>
<IsLocalized/>
<SequenceStar>
<Spin/>
<BackUp/>
<Spin/>
</SequenceStar>
</Fallback>
<IsLocalized/>
</Sequence>
</RetryUntilSuccesful>
</SequenceStar>
</FallbackStar>
</BehaviorTree>
</root>
Image below depicts the graphical version of this Behavior Tree:

AutoLocalization branch is composed of the following condition and action nodes:
Condition Nodes
- initialPoseReceived: Checks
initial_posetopic to determine if the initial pose has been received. Upon completion, this node returns either Success or Failure. - isLocalized: Subscribes to
amcl_poseand it checks the amcl pose covariance values for (x,y,rot) to determine if the robot is localized based on pre-defined tolerance. Upon completion, this node returns either Success or Failure. #### Action Nodes - globalLocalizationServiceRequest: Invokes a service call to amcl’s global localization to disperse particle cloud in free space of the map.
- Spin: Rotates the robot by sending angular velocity commands. This node currently is time based; the control based method has not been implemented yet. It returns either Success, Failure, or Running.
- BackUp: Backs up the robot by sending linear velocity commands in -x direction. This node currently is time based; the control based method has not been implemented yet. It returns either Success, Failure, or Running. Be advised that currently obstacle avoidance has not been integrated in the back up task yet.
The AutoLocalization branch starts by first determining if the initial robot pose has been received or not. If there is an initial pose, it will simply return Success and the AutoLocalization will not proceed. On the other hand, if initial pose is not received, it will return failure which causes the doAutoLocalization SequenceStar node to invoke. In this branch, first, the globalLocalizationServiceRequest gets ticked to generate uniform particle cloud in the free space of the map. Then, robot starts to spin and back up while simultaneously isLocalized node checks to determine if the robot is localized. If the robot location cannot be determined, the retry node will attempt the AutoLocalization process with pre-determined number of tries. Once the robot is localized, the tree will return success. If the robot is not localized by attempting all the retries, AutoLocalization branch will return Failure.
To run AutoLocalization branch, the bt_navigator_params.yaml file needs to be modified to include auto_localization.xml file. To run AutoLocalization with Recovery and Parallel Planning and Control, the auto_localization_w_parallel_recovery.xml needs to be included in the bt_navigator_params.yaml file.
Image below depicts the graphical version of the complete Navigation Task with AutoLocalization, Recovery, Parallel Planning and Control Behavior Tree:

Creating custom Behavior Tree nodes
A Behavior Tree consists of various kinds of nodes: control flow nodes, such as fallback, sequence, parallel, and decorator, as well as condition and action nodes. The current Navigation2 software implements a few custom nodes, including Conditions and Actions. The user can also define and register additional node types that can then be used in BTs and the corresponding XML descriptions. See the code for examples.
Open Issues
- Schema definition and XML document validation - Currently, there is no dynamic validation of incoming XML. The Behavior-Tree.CPP library is using tinyxml2, which doesn't have a validator. Instead, we can create a schema for the Mission Planning-level XML and use build-time validation of the XML input to ensure that it is well-formed and valid.
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| navigation2 | github-ros-planning-navigation2 |
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_bt_navigator at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.3.5 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | eloquent-devel |
| Last Updated | 2021-01-04 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
BT Navigator
The BT Navigator (Behavior Tree Navigator) module implements the NavigateToPose task interface. It is a Behavior Tree-based implementation of navigation that is intended to allow for flexibility in the navigation task and provide a way to easily specify complex robot behaviors, including recovery.
Overview
The BT Navigator receives a goal pose and navigates the robot to the specified destination. To do so, the module reads an XML description of the Behavior Tree from a file, as specified by a Node parameter, and passes that to a generic BehaviorTreeEngine class which uses the Behavior-Tree.CPP library to dynamically create and execute the BT.
Specifying an input XML file
The BtNavigator node has a parameter, bt_xml_filename, that can be specified using a ROS2 parameters YAML file, like this:
BtNavigator:
ros__parameters:
bt_xml_filename: <path-to-xml-file>
Using the XML filename as a parameter makes it easy to change or extend the logic used for navigation. Once can simply update the XML description for the BT and the BtNavigator task server will use the new description.
Behavior Tree nodes
A Behavior Tree consists of control flow nodes, such as fallback, sequence, parallel, and decorator, as well as two execution nodes: condition and action nodes. Execution nodes are the leaf nodes of the tree. When a leaf node is ticked, the node does some work and it returns either SUCCESS, FAILURE or RUNNING. The current Navigation2 software implements a few custom nodes, including Conditions and Actions. The user can also define and register additional node types that can then be used in BTs and the corresponding XML descriptions.
Navigation Behavior Trees
The BT Navigator package has two sample XML-based descriptions of BTs. These trees are navigate_w_replanning.xml and navigate_w_replanning_and_recovery.xml. The user may use any of these sample trees or develop a more complex tree which could better suit the user's needs.
Navigate with Replanning
navigate_w_replanning.xml implements basic navigation by continuously computing and updating the path at a rate of 1Hz. The default controller, the nav2_dwb_controller, implements path following at a rate of 10Hz.
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<Sequence name="root">
<RateController hz="1.0">
<Fallback>
<GoalReached/>
<ComputePathToPose goal="${goal}" planner_id="GridBased"/>
</Fallback>
</RateController>
<FollowPath path="${path}" controller_id="FollowPath"/>
</Sequence>
</BehaviorTree>
</root>
Navigate with replanning is composed of the following custom decorator, condition, contro and action nodes:
Control Nodes
- PipelineSequence: This is a variant of a Sequence Node. When this node is ticked, it will tick the first child till it succeeds. Then it will tick the first two children till the second one succeeds. Then it will tick the first three till the third succeeds and so on, till there are no more children. This will return RUNNING, till the last child succeeds, at which time it also returns SUCCESS. If any child returns FAILURE, all nodes are halted and this node returns FAILURE.
RoundRobin: This is a custom control node introduced to the Behavior Tree. When this node is ticked, it will tick the first child until it returns SUCCESS or FAILURE. If the child returns either SUCCESS or FAILURE, it will tick its next child. Once the node reaches the last child, it will restart ticking from the first child. The main difference between the RoundRobin node versus the Sequence node is that when a child returns FAILURE the RoundRobin node will tick the next child but in the Sequence node, it will return FAILURE.
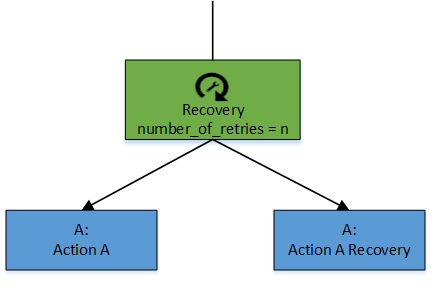
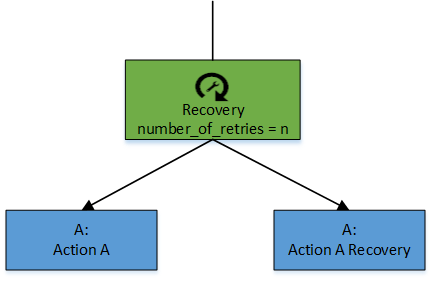
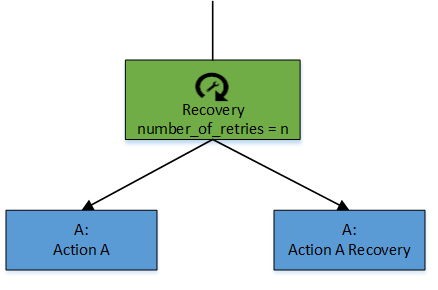
Recovery: This is a control flow type node with two children. It returns success if and only if the first child returns success. The second child will be executed only if the first child returns failure. The second child is responsible for recovery actions such as re-initializing system or other recovery behaviors. If the recovery behaviors are succeeded, then the first child will be executed again. The user can specify how many times the recovery actions should be taken before returning failure. The figure below depicts a simple recovery node.

Decorator Nodes
- RateController: A custom control flow node, which throttles down the tick rate. This custom node has only one child and its tick rate is defined with a pre-defined frequency that the user can set. This node returns RUNNING when it is not ticking its child. Currently, in the navigation, the
RateControlleris used to tick theComputePathToPoseandGoalReachednode at 1 Hz.
Condition Nodes
- GoalReached: Checks the distance to the goal, if the distance to goal is less than the pre-defined threshold, the tree returns SUCCESS, which in that case the
ComputePathToPoseaction node will not get ticked.
Action Nodes
- ComputePathToPose: When this node is ticked, the goal will be placed on the blackboard which will be shared to the Behavior tree. The bt action node would then utilizes the action server to send a request to the global planner to recompute the global path. Once the global path is recomputed, the result will be sent back via action server and then the updated path will be placed on the blackboard. The
plannerparameter will tell the planning server which of the loaded planning plugins to utilize, in case of desiring different parameters, planners, or behaviors. The name of the planner should correspond with the high level task it accomplishes and align with theplanner_idsname given to it in the planner server. If no planner name is provided, it will use the only planner in the planner server when only one is available.
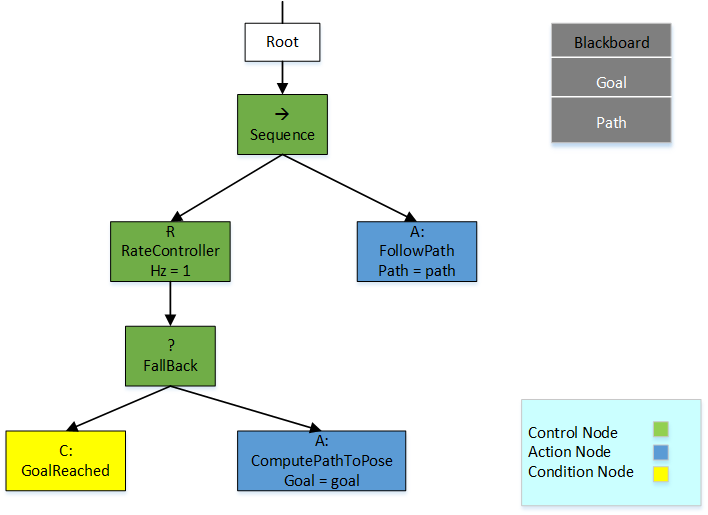
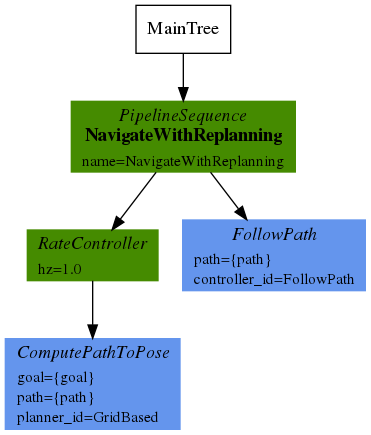
The graphical version of this Behavior Tree:
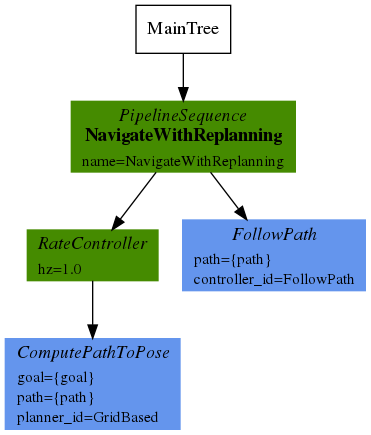
The navigate with replanning BT first ticks the RateController node which specifies how frequently the GoalReached and ComputePathToPose should be invoked. Then the GoalReached nodes check the distance to the goal to determine if the ComputePathToPose should be ticked or not. The ComputePathToPose gets the incoming goal pose from the blackboard, computes the path and puts the result back on the blackboard, where FollowPath picks it up. Each time a new path is computed, the blackboard gets updated and then FollowPath picks up the new goal to compute a control effort for. controller_id will specify the type of control effort you'd like to compute such as FollowPath FollowPathSlow FollowPathExactly, etc.
Navigate with replanning and simple recovery actions
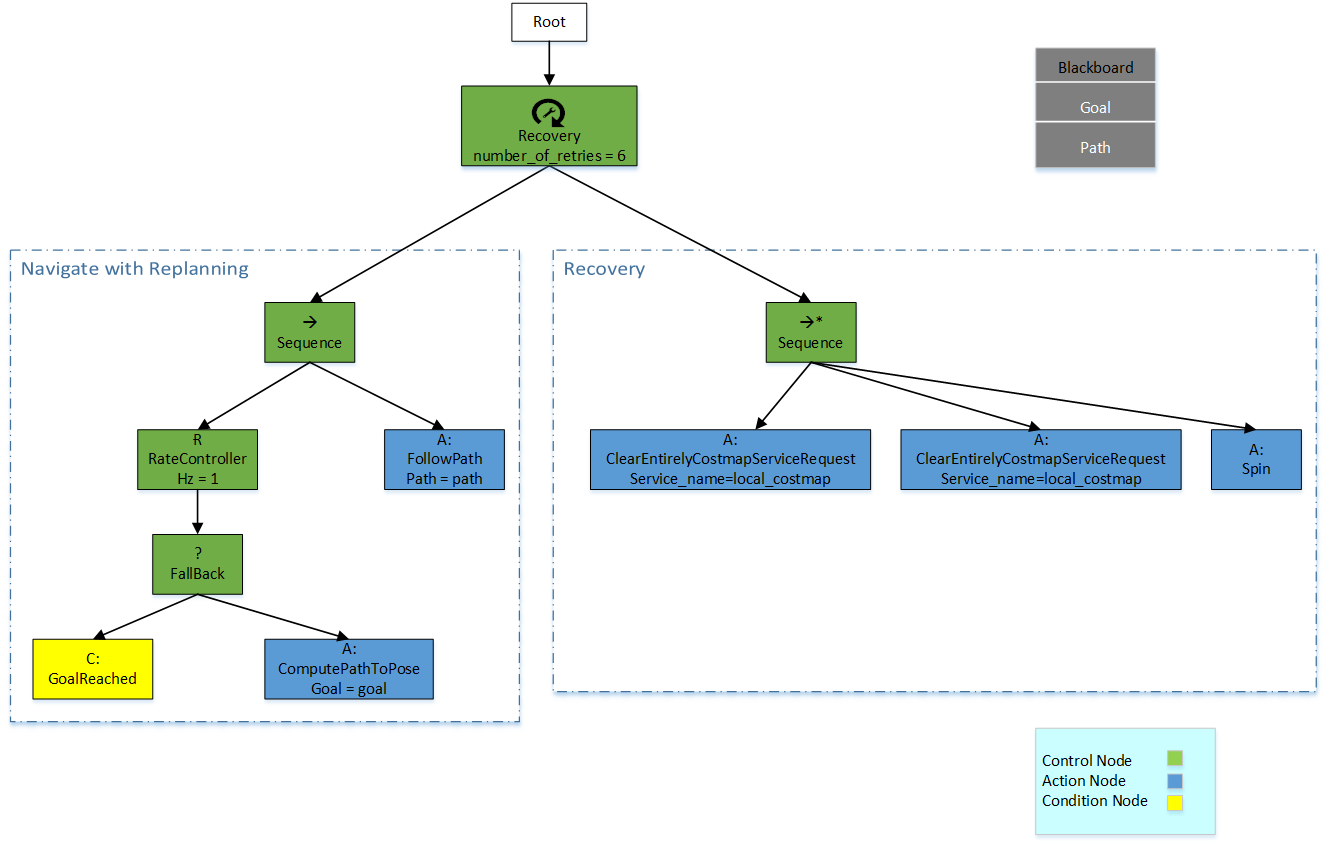
With the recovery node, simple recoverable navigation with replanning can be implemented by utilizing the navigate_w_replanning.xml and a sequence of recovery actions. Our custom behavior actions for recovery are: clearEntirelyCostmapServiceRequest for both global and local costmaps and spin. A graphical version of this simple recoverable Behavior Tree is depicted in the figure below.
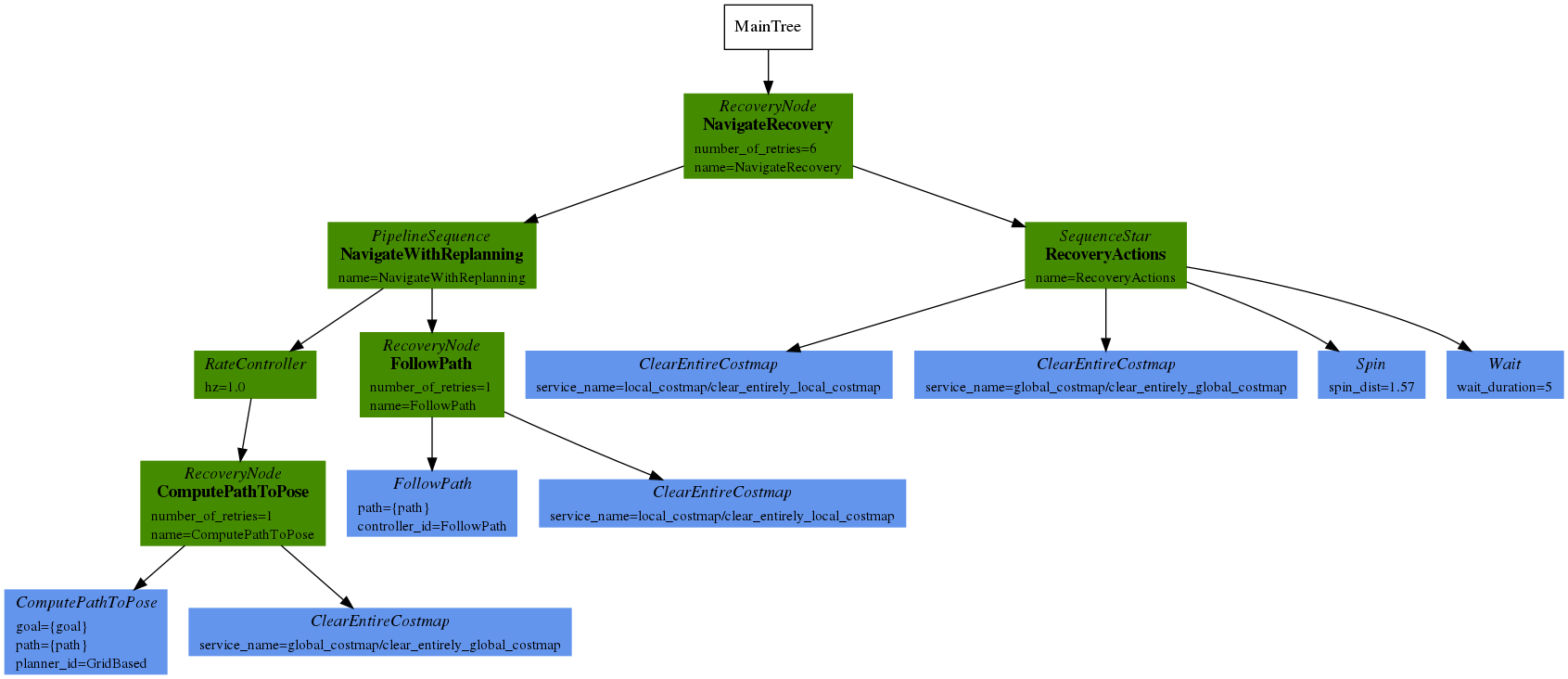
This tree is currently our default tree in the stack and the xml file is located here: navigate_w_replanning_and_recovery.xml.
Multi-Scope Recoveries
Scope-based failure handling: Utilizing Behavior Trees with a recovery node allows one to handle failures at multiple scopes. With this capability, any action in a large system can be constructed with specific recovery actions suitable for that action. Thus, failures in these actions can be handled locally within the scope. With such design, a system can be recovered at multiple levels based on the nature of the failure. Higher level recovery actions could be recovery actions such as re-initializing the system, re-calibrating the robot, bringing the system to a good known state, etc.
Navigate with replanning and simple Multi-Scope Recoveries
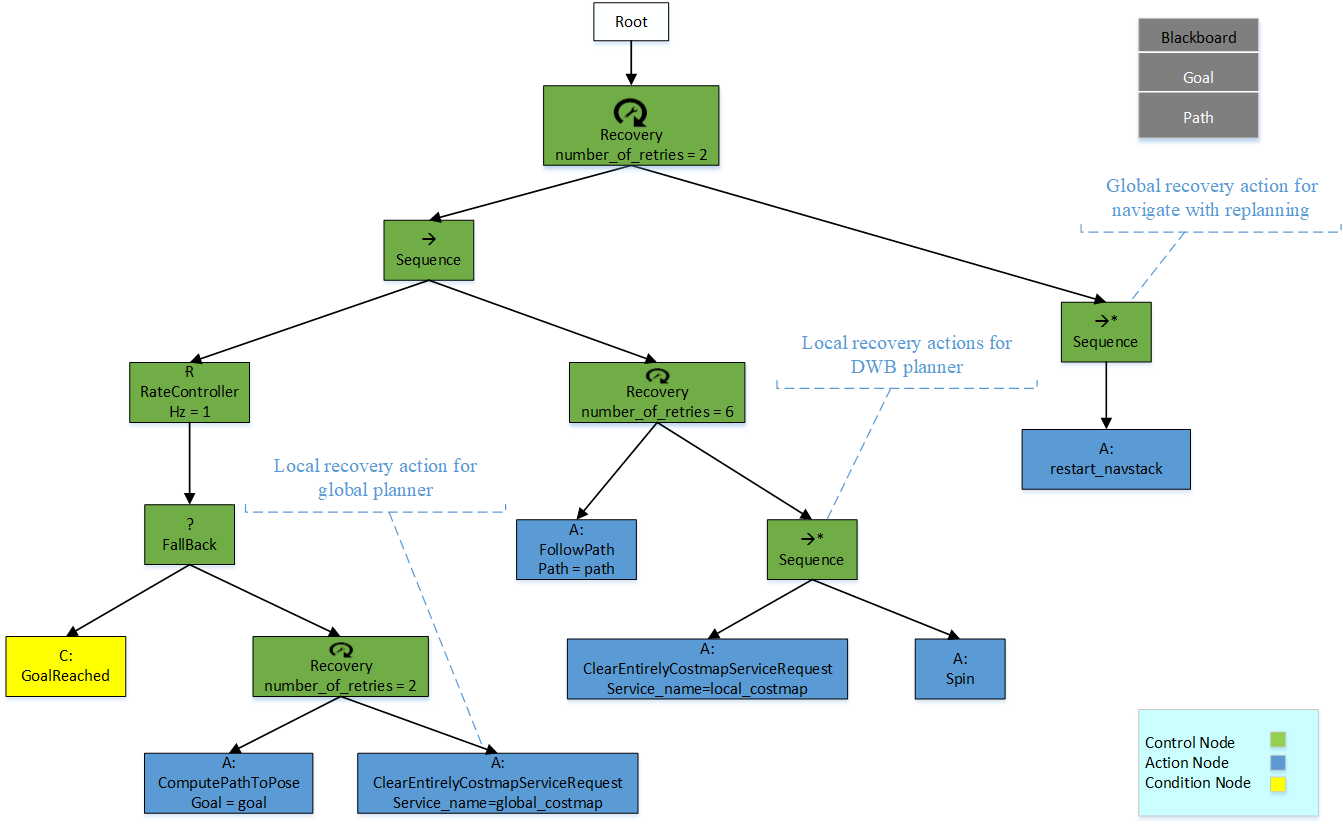
In the navigation stack, multi-scope recovery actions are implemented for each module. Currently, the recovery actions for the Global planner are: Clear Entire Global Costmap and Wait. The recovery actions for the Local planner are: Clear Entire Local Costmap and Spin; the recovery actions for the system level is just Wait. The figure below highlights a simple multi-scope recovery handling for the navigation task. With this tree, if the Global Planner fails, the ClearEntireCostmap which is the first recovery action for this module will be ticked, then the ComputePathToPose will be ticked again. If the ComputePathToPose fails again, the Wait which is the second recovery action for this module will be ticked. After trying the second recovery action, the ComputePathToPose will be ticked again. These actions can be repeated n times until ComputePathToPose succeeds. If the ComputePathToPose fails and the Global Planner cannot be recovered locally, the higher-level recovery actions will be ticked. In this simple example, our higher-level recovery action is just a longer wait. The same strategy is applied to the Local Planner. If the Local Planner fails, the tree will first tick the ClearEntireCostmap and then if it fails again the tree will tick the Spin.
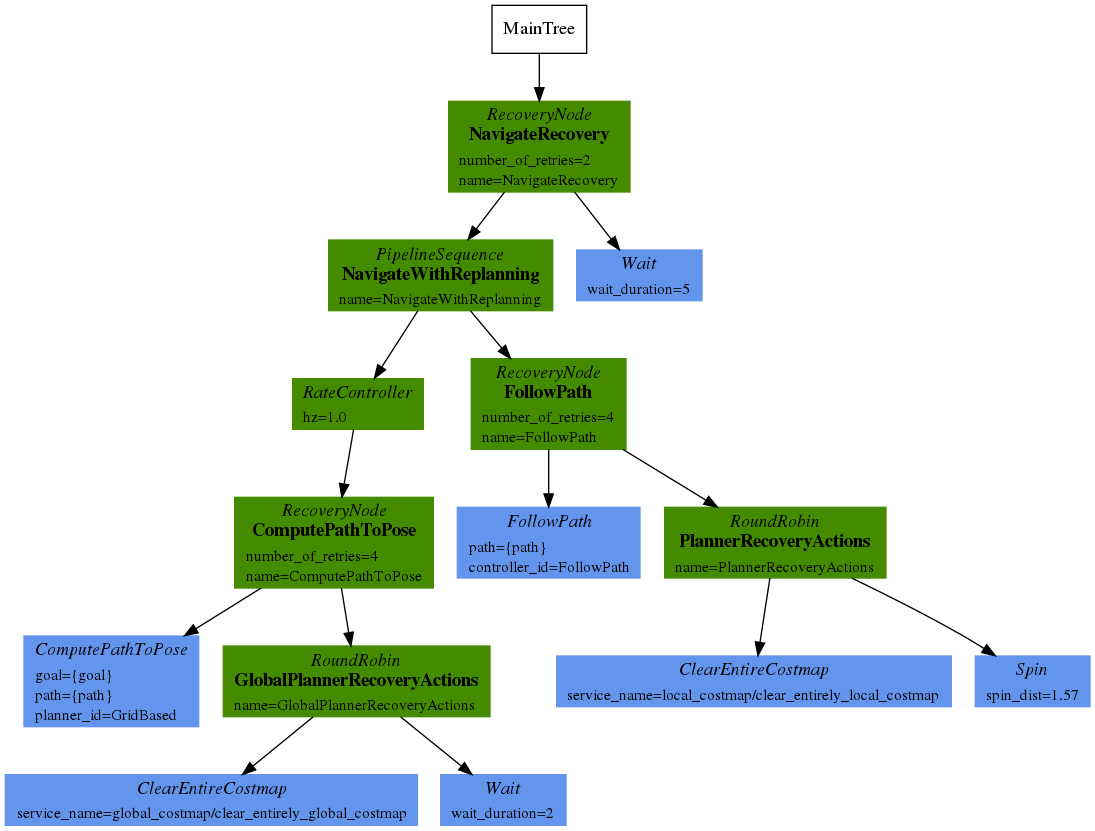
This tree currently is not our default tree in the stack. The xml file is located here: navigate_w_replanning_and_round_robin_recovery.xml.
Open Issues
- Schema definition and XML document validation - Currently, there is no dynamic validation of incoming XML. The Behavior-Tree.CPP library is using tinyxml2, which doesn't have a validator. Instead, we can create a schema for the Mission Planning-level XML and use build-time validation of the XML input to ensure that it is well-formed and valid.
Legend
Legend for the behavior tree diagrams:
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| navigation2 | github-ros-planning-navigation2 |
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_bt_navigator at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.2.6 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | dashing-devel |
| Last Updated | 2020-12-28 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
BT Navigator
The BT Navigator (Behavior Tree Navigator) module implements the NavigateToPose task interface. It is a Behavior Tree-based implementation of navigation that is intended to allow for flexibility in the navigation task and provide a way to easily specify complex robot behaviors, including recovery.
Overview
The BT Navigator receives a goal pose and navigates the robot to the specified destination. To do so, the module reads an XML description of the Behavior Tree from a file, as specified by a Node parameter, and passes that to a generic BehaviorTreeEngine class which uses the Behavior-Tree.CPP library to dynamically create and execute the BT.
Specifying an input XML file
The BtNavigator node has a parameter, bt_xml_filename, that can be specified using a ROS2 parameters YAML file, like this:
BtNavigator:
ros__parameters:
bt_xml_filename: <path-to-xml-file>
Using the XML filename as a parameter makes it easy to change or extend the logic used for navigation. Once can simply update the XML description for the BT and the BtNavigator task server will use the new description.
Behavior Tree nodes
A Behavior Tree consists of control flow nodes, such as fallback, sequence, parallel, and decorator, as well as two execution nodes: condition and action nodes. Execution nodes are the leaf nodes of the tree. When a leaf node is ticked, the node does some work and it returns either SUCCESS, FAILURE or RUNNING. The current Navigation2 software implements a few custom nodes, including Conditions and Actions. The user can also define and register additional node types that can then be used in BTs and the corresponding XML descriptions.
Navigation Behavior Trees
The BT Navigator package has two sample XML-based descriptions of BTs. These trees are navigate_w_replanning.xml and navigate_w_replanning_and_recovery.xml. The user may use any of these sample trees or develop a more complex tree which could better suit the user's needs.
Navigate with Replanning
navigate_w_replanning.xml implements basic navigation by continuously computing and updating the path at a rate of 1Hz. The default local planner, the nav2_dwb_controller, implements path following at a rate of 10Hz.
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<Sequence name="root">
<RateController hz="1.0">
<Fallback>
<GoalReached/>
<ComputePathToPose goal="${goal}"/>
</Fallback>
</RateController>
<FollowPath path="${path}"/>
</Sequence>
</BehaviorTree>
</root>
Navigate with replanning is composed of the following custom decorator, condition and action nodes:
Decorator Nodes
- RateController: A custom control flow node, which throttles down the tick rate. This custom node has only one child and its tick rate is defined with a pre-defined frequency that the user can set. This node returns RUNNING when it is not ticking its child. Currently, in the navigation, the
RateControlleris used to tick theComputePathToPoseandGoalReachednode at 1 Hz.
Condition Nodes
- GoalReached: Checks the distance to the goal, if the distance to goal is less than the pre-defined threshold, the tree returns SUCCESS, which in that case the
ComputePathToPoseaction node will not get ticked.
Action Nodes
- ComputePathToPose: When this node is ticked, the goal will be placed on the blackboard which will be shared to the Behavior tree. The bt action node would then utilizes the action server to send a request to the global planner to recompute the global path. Once the global path is recomputed, the result will be sent back via action server and then the updated path will be placed on the blackboard.
The graphical version of this Behavior Tree:
The navigate with replanning BT first ticks the RateController node which specifies how frequently the GoalReached and ComputePathToPose should be invoked. Then the GoalReached nodes check the distance to the goal to determine if the ComputePathToPose should be ticked or not. The ComputePathToPose gets the incoming goal pose from the blackboard, computes the path and puts the result back on the blackboard, where FollowPath picks it up. Each time a new path is computed, the blackboard gets updated and then FollowPath picks up the new goal.
Recovery Node
In this section, the recovery node is being introduced to the navigation package.
Recovery node is a control flow type node with two children. It returns success if and only if the first child returns success. The second child will be executed only if the first child returns failure. The second child is responsible for recovery actions such as re-initializing system or other recovery behaviors. If the recovery behaviors are succeeded, then the first child will be executed again. The user can specify how many times the recovery actions should be taken before returning failure. The figure below depicts a simple recovery node.
Navigate with replanning and simple recovery actions
With the recovery node, simple recoverable navigation with replanning can be implemented by utilizing the navigate_w_replanning.xml and a sequence of recovery actions. Our custom behavior actions for recovery are: clearEntirelyCostmapServiceRequest for both global and local costmaps and spin. A graphical version of this simple recoverable Behavior Tree is depicted in the figure below.
This tree is currently our default tree in the stack and the xml file is located here: navigate_w_replanning_and_recovery.xml.
Future Work
Scope-based failure handling: Utilizing Behavior Trees with a recovery node allows one to handle failures at multiple scopes. With this capability, any action in a large system can be constructed with specific recovery actions suitable for that action. Thus, failures in these actions can be handled locally within the scope. With such design, a system can be recovered at multiple levels based on the nature of the failure. Higher level recovery actions could be recovery actions such as re-initializing the system, re-calibrating the robot, bringing the system to a good known state, etc. Currently, in the navigation stack, multi-scope recovery actions are not implemented. The figure below highlights a simple multi-scope recovery handling for the navigation task.
Open Issues
- Schema definition and XML document validation - Currently, there is no dynamic validation of incoming XML. The Behavior-Tree.CPP library is using tinyxml2, which doesn't have a validator. Instead, we can create a schema for the Mission Planning-level XML and use build-time validation of the XML input to ensure that it is well-formed and valid.
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| navigation2 | github-ros-planning-navigation2 |
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_bt_navigator at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.12 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2022-09-15 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
BT Navigator
The BT Navigator (Behavior Tree Navigator) module implements the NavigateToPose task interface. It is a Behavior Tree-based implementation of navigation that is intended to allow for flexibility in the navigation task and provide a way to easily specify complex robot behaviors.
NOTE: This readme may be outdated, please reference navigation.ros.org for the most current information.
Overview
The BT Navigator receives a goal pose and navigates the robot to the specified destination. To do so, the module reads an XML description of the Behavior Tree from a file, as specified by a Node parameter, and passes that to a generic BehaviorTreeEngine class which uses the Behavior-Tree.CPP library to dynamically create and execute the BT.
Specifying an input XML file
The BtNavigator node has a parameter, bt_xml_filename, that can be specified using a ROS2 parameters YAML file, like this:
BtNavigator:
ros__parameters:
bt_xml_filename: <path-to-xml-file>
Using the XML filename as a parameter makes it easy to change or extend the logic used for navigation. Once can simply update the XML description for the BT and the BtNavigator task server will use the new description.
Behavior Tree nodes
A Behavior Tree consists of control flow nodes, such as fallback, sequence, parallel, and decorator, as well as two execution nodes: condition and action nodes. Execution nodes are the leaf nodes of the tree. When a leaf node is ticked, the node does some work and it returns either SUCCESS, FAILURE or RUNNING. The current Nav2 software implements a few custom nodes, including Conditions and Actions. The user can also define and register additional node types that can then be used in BTs and the corresponding XML descriptions.
Navigation Behavior Trees
The BT Navigator package has four sample XML-based descriptions of BTs.
These trees are navigate_w_replanning_time.xml, navigate_w_replanning_distance.xml, navigate_w_replanning_and_recovery.xml and
follow_point.xml.
The user may use any of these sample trees or develop a more complex tree which could better suit the user's needs.
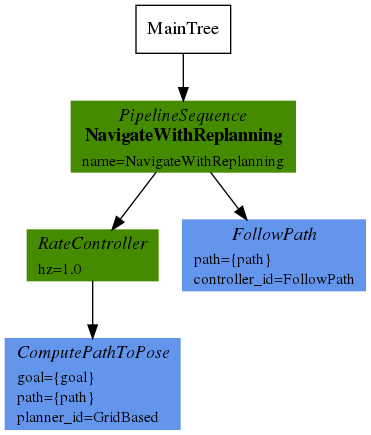
Navigate with Replanning (time-based)
navigate_w_replanning_time.xml implements basic navigation by continuously computing and updating the path at a rate of 1Hz. The default controller, the nav2_dwb_controller, implements path following at a rate of 10Hz.
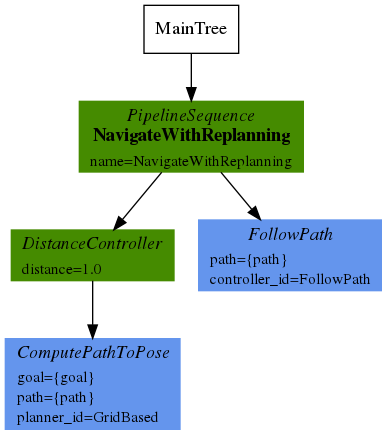
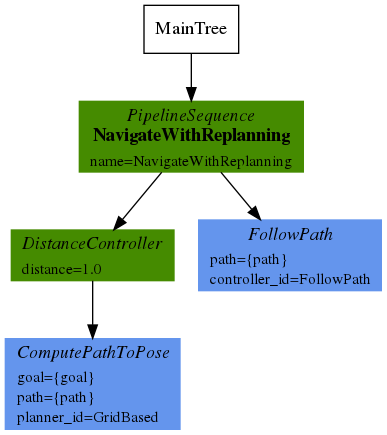
Navigate with Replanning (distace-based)
navigate_w_replanning_distance.xml implements basic navigation by continuously computing and updating the path after every 1 meter distance traveled by the robot.
Navigate with replanning is composed of the following custom decorator, condition, control and action nodes:
Control Nodes
- PipelineSequence: This is a variant of a Sequence Node. When this node is ticked, it will tick the first child till it succeeds. Then it will tick the first two children till the second one succeeds. Then it will tick the first three till the third succeeds and so on, till there are no more children. This will return RUNNING, till the last child succeeds, at which time it also returns SUCCESS. If any child returns FAILURE, all nodes are halted and this node returns FAILURE.
RoundRobin: This is a custom control node introduced to the Behavior Tree. When this node is ticked, it will tick the first child until it returns SUCCESS or FAILURE. If the child returns either SUCCESS or FAILURE, it will tick its next child. Once the node reaches the last child, it will restart ticking from the first child. The main difference between the RoundRobin node versus the Sequence node is that when a child returns FAILURE the RoundRobin node will tick the next child but in the Sequence node, it will return FAILURE.
Recovery: This is a control flow type node with two children. It returns success if and only if the first child returns success. The second child will be executed only if the first child returns failure. The second child is responsible for recovery actions such as re-initializing system or other recovery behaviors. If the recovery behaviors are succeeded, then the first child will be executed again. The user can specify how many times the recovery actions should be taken before returning failure. The figure below depicts a simple recovery node.
Decorator Nodes
RateController: A custom control flow node, which throttles down the tick rate. This custom node has only one child and its tick rate is defined with a pre-defined frequency that the user can set. This node returns RUNNING when it is not ticking its child. Currently, in the navigation, the
RateControlleris used to tick theComputePathToPoseandGoalReachednode at 1 Hz.DistanceController: A custom control flow node, which controls the tick rate based on the distance traveled. This custom node has only one child. The user can set the distance after which the planner should replan a new path. This node returns RUNNING when it is not ticking its child. Currently, in navigation, the
DistanceControlleris used to tick theComputePathToPoseandGoalReachednode after every 0.5 meters.SpeedController: A custom control flow node, which controls the tick rate based on the current speed. This decorator offers the most flexibility as the user can set the minimum/maximum tick rate which is adjusted according to the current speed.
GoalUpdater: A custom control node, which updates the goal pose. It subscribes to a topic in which it can receive an updated goal pose to use instead of the one commanded in action. It is useful for dynamic object following tasks.
Condition Nodes
- GoalReached: Checks the distance to the goal, if the distance to goal is less than the pre-defined threshold, the tree returns SUCCESS, which in that case the
ComputePathToPoseaction node will not get ticked.
Action Nodes
- ComputePathToPose: When this node is ticked, the goal will be placed on the blackboard which will be shared to the Behavior tree. The bt action node would then utilizes the action server to send a request to the global planner to recompute the global path. Once the global path is recomputed, the result will be sent back via action server and then the updated path will be placed on the blackboard. The
plannerparameter will tell the planning server which of the loaded planning plugins to utilize, in case of desiring different parameters, planners, or behaviors. The name of the planner should correspond with the high level task it accomplishes and align with theplanner_idsname given to it in the planner server. If no planner name is provided, it will use the only planner in the planner server when only one is available.
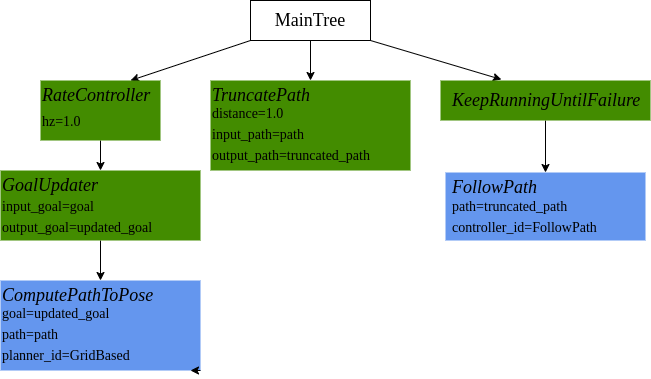
The graphical version of this Behavior Tree:

The navigate with replanning BT first ticks the RateController node which specifies how frequently the GoalReached and ComputePathToPose should be invoked. Then the GoalReached nodes check the distance to the goal to determine if the ComputePathToPose should be ticked or not. The ComputePathToPose gets the incoming goal pose from the blackboard, computes the path and puts the result back on the blackboard, where FollowPath picks it up. Each time a new path is computed, the blackboard gets updated and then FollowPath picks up the new goal to compute a control effort for. controller_id will specify the type of control effort you'd like to compute such as FollowPath FollowPathSlow FollowPathExactly, etc.
- TruncatePath: A custom control node, which modifies a path making it shorter. It removes parts of the path closer than a distance to the goal pose. The resulting last pose of the path orientates the robot to the original goal pose.
Navigate with replanning and simple recovery actions
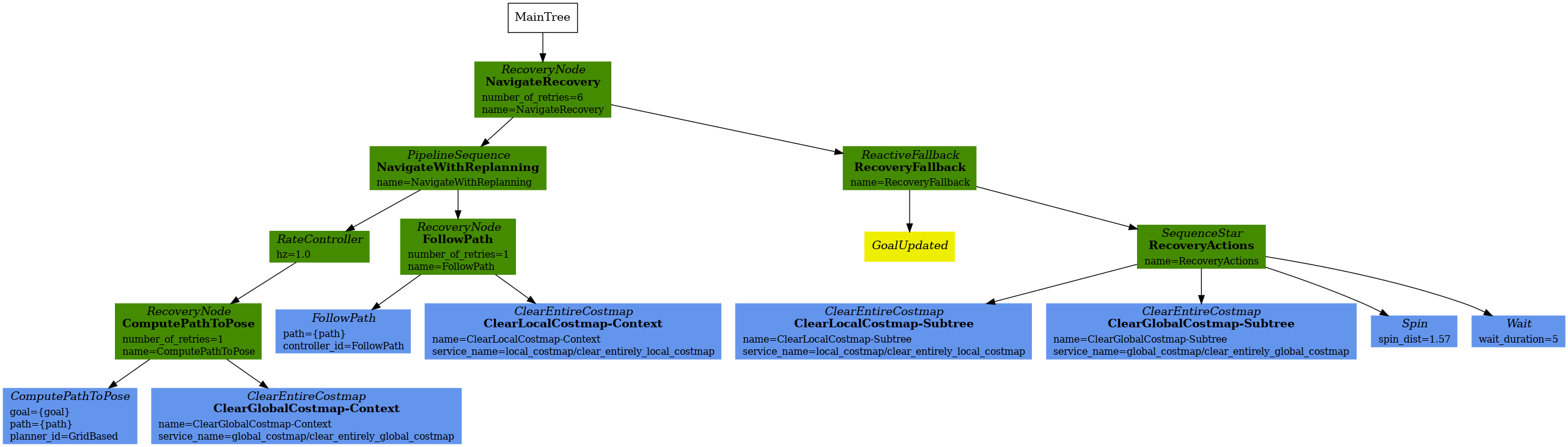
With the recovery node, simple recoverable navigation with replanning can be implemented by utilizing the navigate_w_replanning_time.xml and a sequence of recovery actions. Our custom behavior actions for recovery are: clearEntirelyCostmapServiceRequest for both global and local costmaps, spin, wait, and backup.
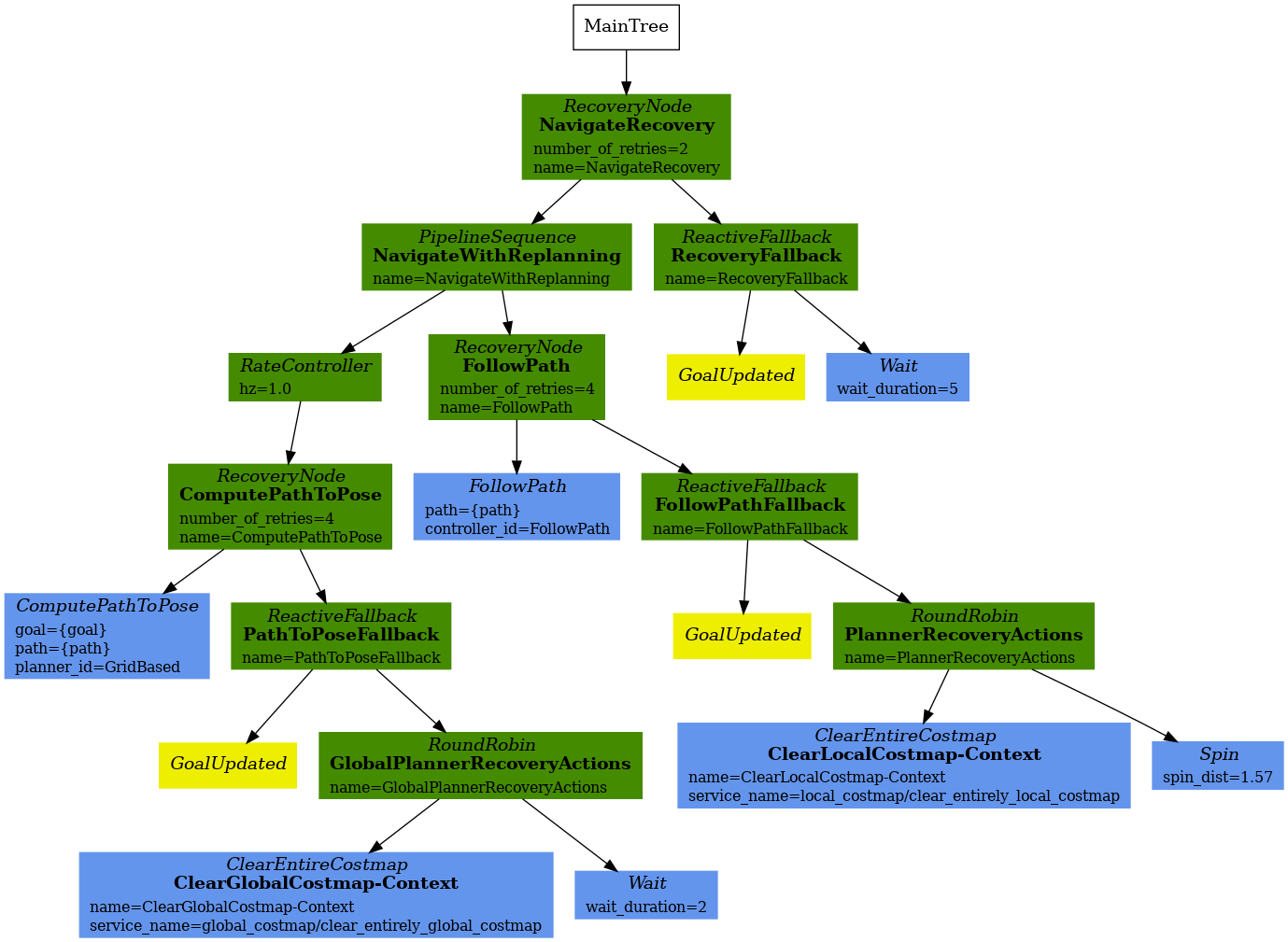
This behavior tree implements multi-scope recovery where both the global planner and the controller have their own recovery actions on failure in addition to the main recovery subtree that gets triggered if the planner or controller continues to fail. The planner/controller specific recovery subtrees contain only a simple costmap clearing action in this BT. The main recovery subtree triggers recovery actions in a round robin fashion where the navigation subtree is retried after trying one recovery action. If the navigation subtree fails even after a retry, the RoundRobin node triggers the next recovery action in the sequence and the navigation subtree is retried. This cycle continues until:
- The navigation subtree succeeds
- All recovery actions fail
- Specified number of retries is exceeded
All recovery actions are preemptable and are halted when a new navigation goal arrives.
A graphical version of this simple recoverable Behavior Tree is depicted in the figure below.
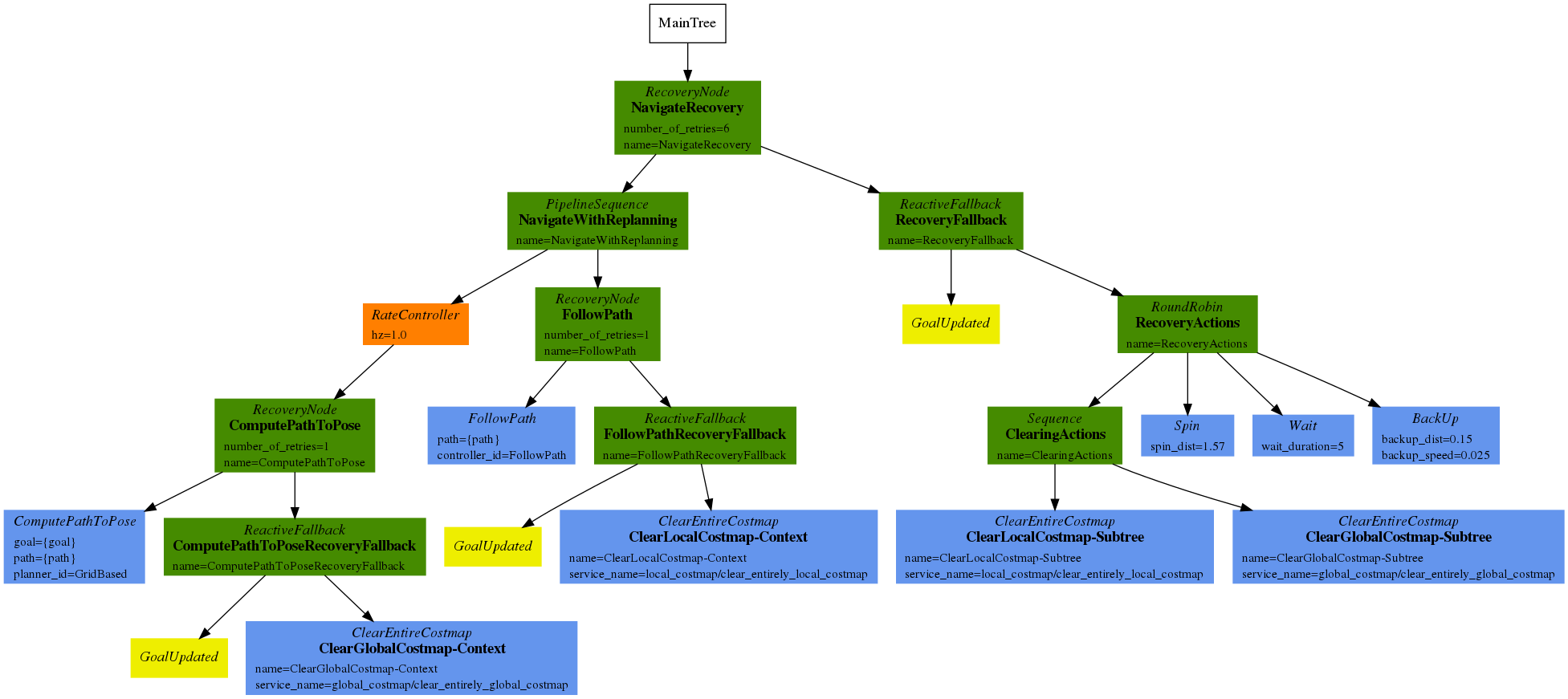
This tree is currently our default tree in the stack and the xml file is located here: navigate_w_replanning_and_recovery.xml.
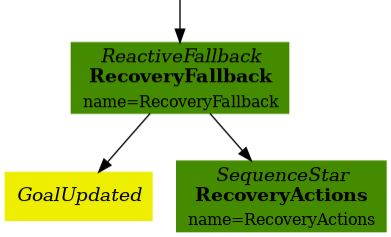
Halting recoveries on navigation goal (Preemption reference design)
In general, the recovery behaviours and any other long running process should be stopped when the navigation goal is issued (e.g. preemption). In the default tree in the stack, this behaviour is accomplished using a condition node checking the global navigation goal and a reactive fallback controller node:
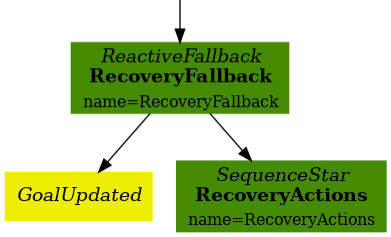
This way, the recovery actions can be interrupted if a new goal is sent to the bt_navigator. Adding other condition nodes to this structure, it is possible to halt the recoveries in other cases (e.g, giving a time limit for their execution). This is the recommended design pattern for preempting a node or tree branch under specific conditions such as a new navigation request. Please notice that the order of definition of the nodes in the xml file can alter the behaviour of this structure, and that all conditions should be placed before the recovery behaviour node or branch.
Multi-Scope Recoveries
Scope-based failure handling: Utilizing Behavior Trees with a recovery node allows one to handle failures at multiple scopes. With this capability, any action in a large system can be constructed with specific recovery actions suitable for that action. Thus, failures in these actions can be handled locally within the scope. With such design, a system can be recovered at multiple levels based on the nature of the failure. Higher level recovery actions could be recovery actions such as re-initializing the system, re-calibrating the robot, bringing the system to a good known state, etc.
Navigate following a dynamic point to a certain distance
This tree is an example of how behavior trees can be used to make the robot do more than navigate the current position to the desired pose. In this case, the robot will follow a point that changes dynamically during the execution of the action. The robot will stop its advance and will be oriented towards the target position when it reaches a distance to the target established in the tree. The UpdateGoal decorator node will be used to update the target position. The TruncatePath node will modify the generated path by removing the end part of this path, to maintain a distance from the target, and changes the orientation of the last position. This tree never returns that the action has finished successfully, but must be canceled when you want to stop following the target position.
This tree currently is not our default tree in the stack. The xml file is located here: follow_point.xml.
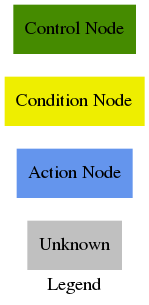
Legend
Legend for the behavior tree diagrams:
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| navigation2 | github-ros-planning-navigation2 |
Launch files
Messages
Services
Plugins
Recent questions tagged nav2_bt_navigator at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.4.7 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-planning/navigation2.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2022-08-31 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Michael Jeronimo
Authors
BT Navigator
The BT Navigator (Behavior Tree Navigator) module implements the NavigateToPose task interface. It is a Behavior Tree-based implementation of navigation that is intended to allow for flexibility in the navigation task and provide a way to easily specify complex robot behaviors, including recovery.
Overview
The BT Navigator receives a goal pose and navigates the robot to the specified destination. To do so, the module reads an XML description of the Behavior Tree from a file, as specified by a Node parameter, and passes that to a generic BehaviorTreeEngine class which uses the Behavior-Tree.CPP library to dynamically create and execute the BT.
Specifying an input XML file
The BtNavigator node has a parameter, bt_xml_filename, that can be specified using a ROS2 parameters YAML file, like this:
BtNavigator:
ros__parameters:
bt_xml_filename: <path-to-xml-file>
Using the XML filename as a parameter makes it easy to change or extend the logic used for navigation. Once can simply update the XML description for the BT and the BtNavigator task server will use the new description.
Behavior Tree nodes
A Behavior Tree consists of control flow nodes, such as fallback, sequence, parallel, and decorator, as well as two execution nodes: condition and action nodes. Execution nodes are the leaf nodes of the tree. When a leaf node is ticked, the node does some work and it returns either SUCCESS, FAILURE or RUNNING. The current Navigation2 software implements a few custom nodes, including Conditions and Actions. The user can also define and register additional node types that can then be used in BTs and the corresponding XML descriptions.
Navigation Behavior Trees
The BT Navigator package has four sample XML-based descriptions of BTs.
These trees are navigate_w_replanning_time.xml, navigate_w_replanning_distance.xml, navigate_w_replanning_and_recovery.xml and
followpoint.xml.
The user may use any of these sample trees or develop a more complex tree which could better suit the user's needs.
Navigate with Replanning (time-based)
navigate_w_replanning_time.xml implements basic navigation by continuously computing and updating the path at a rate of 1Hz. The default controller, the nav2_dwb_controller, implements path following at a rate of 10Hz.
Navigate with Replanning (distace-based)
navigate_w_replanning_distance.xml implements basic navigation by continuously computing and updating the path after every 1 meter distance traveled by the robot.
Navigate with replanning is composed of the following custom decorator, condition, control and action nodes:
Control Nodes
- PipelineSequence: This is a variant of a Sequence Node. When this node is ticked, it will tick the first child till it succeeds. Then it will tick the first two children till the second one succeeds. Then it will tick the first three till the third succeeds and so on, till there are no more children. This will return RUNNING, till the last child succeeds, at which time it also returns SUCCESS. If any child returns FAILURE, all nodes are halted and this node returns FAILURE.
RoundRobin: This is a custom control node introduced to the Behavior Tree. When this node is ticked, it will tick the first child until it returns SUCCESS or FAILURE. If the child returns either SUCCESS or FAILURE, it will tick its next child. Once the node reaches the last child, it will restart ticking from the first child. The main difference between the RoundRobin node versus the Sequence node is that when a child returns FAILURE the RoundRobin node will tick the next child but in the Sequence node, it will return FAILURE.
Recovery: This is a control flow type node with two children. It returns success if and only if the first child returns success. The second child will be executed only if the first child returns failure. The second child is responsible for recovery actions such as re-initializing system or other recovery behaviors. If the recovery behaviors are succeeded, then the first child will be executed again. The user can specify how many times the recovery actions should be taken before returning failure. The figure below depicts a simple recovery node.
Decorator Nodes
RateController: A custom control flow node, which throttles down the tick rate. This custom node has only one child and its tick rate is defined with a pre-defined frequency that the user can set. This node returns RUNNING when it is not ticking its child. Currently, in the navigation, the
RateControlleris used to tick theComputePathToPoseandGoalReachednode at 1 Hz.DistanceController: A custom control flow node, which controls the tick rate based on the distance traveled. This custom node has only one child. The user can set the distance after which the planner should replan a new path. This node returns RUNNING when it is not ticking its child. Currently, in navigation, the
DistanceControlleris used to tick theComputePathToPoseandGoalReachednode after every 0.5 meters.SpeedController: A custom control flow node, which controls the tick rate based on the current speed. This decorator offers the most flexibility as the user can set the minimum/maximum tick rate which is adjusted according to the current speed.
GoalUpdater: A custom control node, which updates the goal pose. It subscribes to a topic in which it can receive an updated goal pose to use instead of the one commanded in action. It is useful for dynamic object following tasks.
Condition Nodes
- GoalReached: Checks the distance to the goal, if the distance to goal is less than the pre-defined threshold, the tree returns SUCCESS, which in that case the
ComputePathToPoseaction node will not get ticked.
Action Nodes
- ComputePathToPose: When this node is ticked, the goal will be placed on the blackboard which will be shared to the Behavior tree. The bt action node would then utilizes the action server to send a request to the global planner to recompute the global path. Once the global path is recomputed, the result will be sent back via action server and then the updated path will be placed on the blackboard. The
plannerparameter will tell the planning server which of the loaded planning plugins to utilize, in case of desiring different parameters, planners, or behaviors. The name of the planner should correspond with the high level task it accomplishes and align with theplanner_idsname given to it in the planner server. If no planner name is provided, it will use the only planner in the planner server when only one is available.
The graphical version of this Behavior Tree:

The navigate with replanning BT first ticks the RateController node which specifies how frequently the GoalReached and ComputePathToPose should be invoked. Then the GoalReached nodes check the distance to the goal to determine if the ComputePathToPose should be ticked or not. The ComputePathToPose gets the incoming goal pose from the blackboard, computes the path and puts the result back on the blackboard, where FollowPath picks it up. Each time a new path is computed, the blackboard gets updated and then FollowPath picks up the new goal to compute a control effort for. controller_id will specify the type of control effort you'd like to compute such as FollowPath FollowPathSlow FollowPathExactly, etc.
- TruncatePath: A custom control node, which modifies a path making it shorter. It removes parts of the path closer than a distance to the goal pose. The resulting last pose of the path orientates the robot to the original goal pose.
Navigate with replanning and simple recovery actions
With the recovery node, simple recoverable navigation with replanning can be implemented by utilizing the navigate_w_replanning_time.xml and a sequence of recovery actions. Our custom behavior actions for recovery are: clearEntirelyCostmapServiceRequest for both global and local costmaps, spin and wait. A graphical version of this simple recoverable Behavior Tree is depicted in the figure below.
This tree is currently our default tree in the stack and the xml file is located here: navigate_w_replanning_and_recovery.xml.
Halting recoveries on navigation goal (Preemption reference design)
In general, the recovery behaviours and any other long running process should be stopped when the navigation goal is issued (e.g. preemption). In the default tree in the stack, this behaviour is accomplished using a condition node checking the global navigation goal and a reactive fallback controller node:
This way, the recovery actions can be interrupted if a new goal is sent to the bt_navigator. Adding other condition nodes to this structure, it is possible to halt the recoveries in other cases (e.g, giving a time limit for their execution). This is the recommended design pattern for preempting a node or tree branch under specific conditions such as a new navigation request. Please notice that the order of definition of the nodes in the xml file can alter the behaviour of this structure, and that all conditions should be placed before the recovery behaviour node or branch.
Multi-Scope Recoveries
Scope-based failure handling: Utilizing Behavior Trees with a recovery node allows one to handle failures at multiple scopes. With this capability, any action in a large system can be constructed with specific recovery actions suitable for that action. Thus, failures in these actions can be handled locally within the scope. With such design, a system can be recovered at multiple levels based on the nature of the failure. Higher level recovery actions could be recovery actions such as re-initializing the system, re-calibrating the robot, bringing the system to a good known state, etc.
Navigate with replanning and simple Multi-Scope Recoveries
In the navigation stack, multi-scope recovery actions are implemented for each module. Currently, the recovery actions for the Global planner are: Clear Entire Global Costmap and Wait. The recovery actions for the Local planner are: Clear Entire Local Costmap and Spin; the recovery actions for the system level is just Wait. The figure below highlights a simple multi-scope recovery handling for the navigation task. With this tree, if the Global Planner fails, the ClearEntireCostmap which is the first recovery action for this module will be ticked, then the ComputePathToPose will be ticked again. If the ComputePathToPose fails again, the Wait which is the second recovery action for this module will be ticked. After trying the second recovery action, the ComputePathToPose will be ticked again. These actions can be repeated n times until ComputePathToPose succeeds. If the ComputePathToPose fails and the Global Planner cannot be recovered locally, the higher-level recovery actions will be ticked. In this simple example, our higher-level recovery action is just a longer wait. The same strategy is applied to the Local Planner. If the Local Planner fails, the tree will first tick the ClearEntireCostmap and then if it fails again the tree will tick the Spin.
This tree currently is not our default tree in the stack. The xml file is located here: navigate_w_replanning_and_round_robin_recovery.xml.
Navigate following a dynamic point to a certain distance
This tree is an example of how behavior trees can be used to make the robot do more than navigate the current position to the desired pose. In this case, the robot will follow a point that changes dynamically during the execution of the action. The robot will stop its advance and will be oriented towards the target position when it reaches a distance to the target established in the tree. The UpdateGoal decorator node will be used to update the target position. The TruncatePath node will modify the generated path by removing the end part of this path, to maintain a distance from the target, and changes the orientation of the last position. This tree never returns that the action has finished successfully, but must be canceled when you want to stop following the target position.
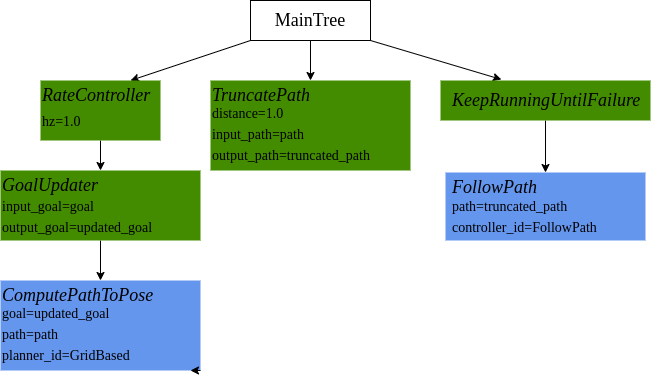
This tree currently is not our default tree in the stack. The xml file is located here: follow_point.xml.
Open Issues
- Schema definition and XML document validation - Currently, there is no dynamic validation of incoming XML. The Behavior-Tree.CPP library is using tinyxml2, which doesn't have a validator. Instead, we can create a schema for the Mission Planning-level XML and use build-time validation of the XML input to ensure that it is well-formed and valid.
Legend
Legend for the behavior tree diagrams:
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| navigation2 | github-ros-planning-navigation2 |