
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
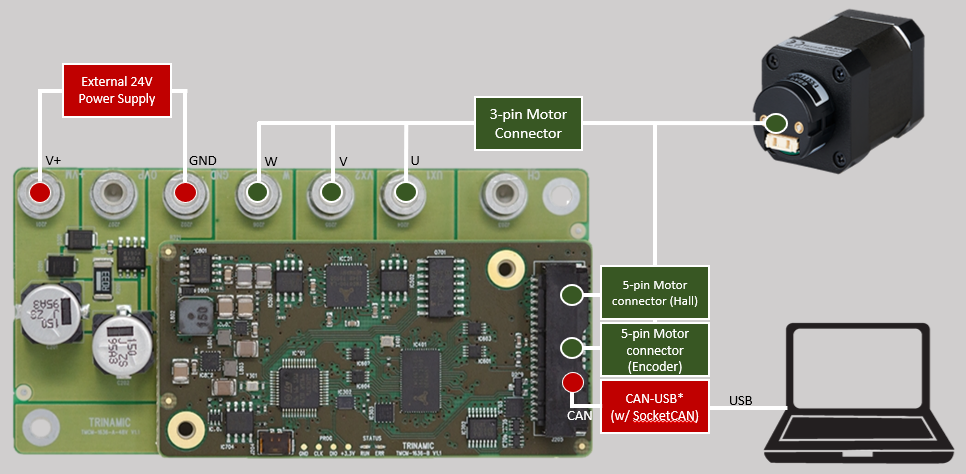
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
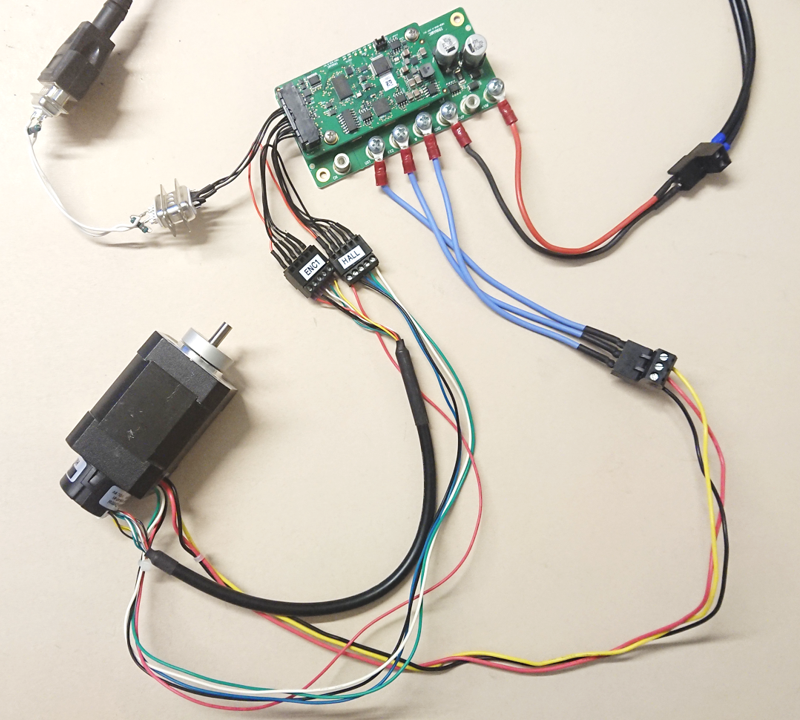
The image below shows the actual setup used (for reference):
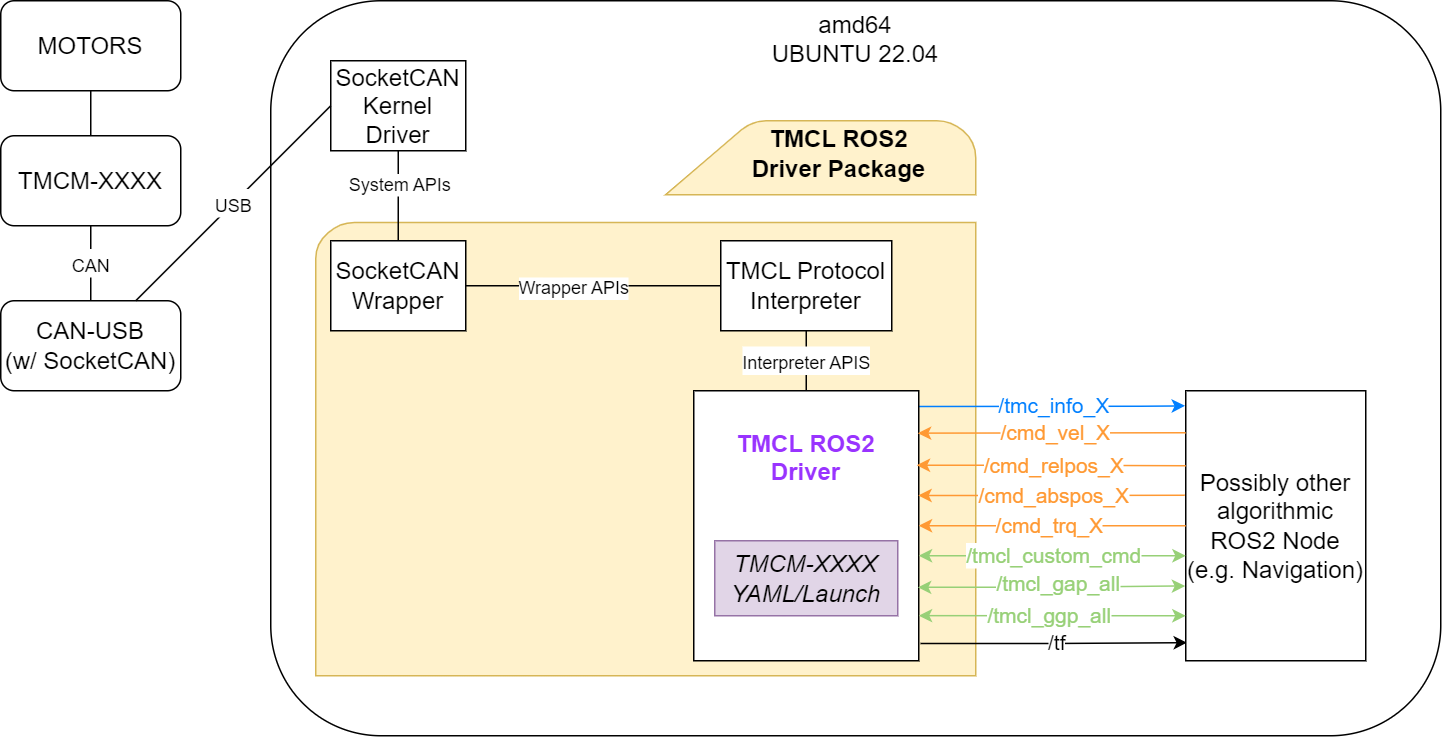
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 2.1.0 |
| License | BSD 3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
Changelog for package tmcl_ros2
2.1.0 (2025-07-31)
- Merge pull request #9 from villyjayt/humble Variable ap_index_bit_width updates + minor updates
- Variable ap_index_bit_width updates + minor updates NOTE: This
commit is still compatible with the current list of supported TMCM
boards.
- Adding variable ap_index_bit_width functionality
- Adding support for TMCM-1690
- Updating scripts
- Merge pull request #4 from analogdevicesinc/read_me_supported_modules Update README.md
- Update README.md Added supported modules in readME
- Contributors: Cacar, Christian Joseph Acar, Jamila Macagba, Vtolent3
2.0.3 (2024-11-13)
- Fix handling of incorrect parameter type and update header files to .hpp
- Contributors: Jamila Macagba
2.0.2 (2024-11-05)
- Added support for TMCM-1316
- Contributors: Jamila Macagba
2.0.1 (2024-07-15)
- Added support for TMCM-2611 Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Update README.md Update README.md with mention of adi_tmcl and tmcl_ros2 Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
2.0.0 (2023-11-21)
- Updated package name and TF values
- Updated to:
- Change package name from "tmcl_ros2" to "adi_tmcl" in preparation for ROS release
- Change TF values (default)
- Contributors: mmaralit-adi, jmacagba
1.0.2 (2023-10-27)
- Update LICENSE file
- Contributors: Jamila Macagba
1.0.1 (2023-10-10)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts
- Contributors: mmaralit-adi, jmacagba
1.0.0 (2023-09-27)
- Adding v1.0.0 of tmcl_ros2, ROS2, Humble
- Contains official ROS2 Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636, TMCM-1617, TMCM-1241, TMCM-1260, TMCM-6214
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: mmaralit-adi, jmacagba
Package Dependencies
| Deps | Name |
|---|---|
| rclcpp | |
| std_msgs | |
| std_srvs | |
| geometry_msgs | |
| ament_cmake | |
| rosidl_default_generators | |
| ros2launch | |
| rosidl_default_runtime | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
Launch files
Plugins
Recent questions tagged adi_tmcl at Robotics Stack Exchange
Package Summary
| Version | 4.0.2 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2025-03-27 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Analog Devices
Authors
adi_tmcl
adi_tmcl (previously tmcl_ros) is the official ROS Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Noetic (Ubuntu 20.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*). PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
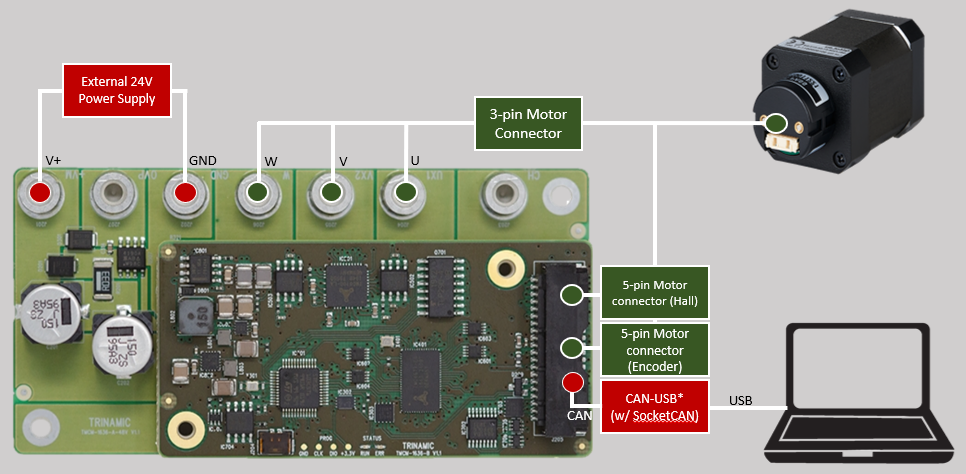
The image below shows the actual setup used (for reference):
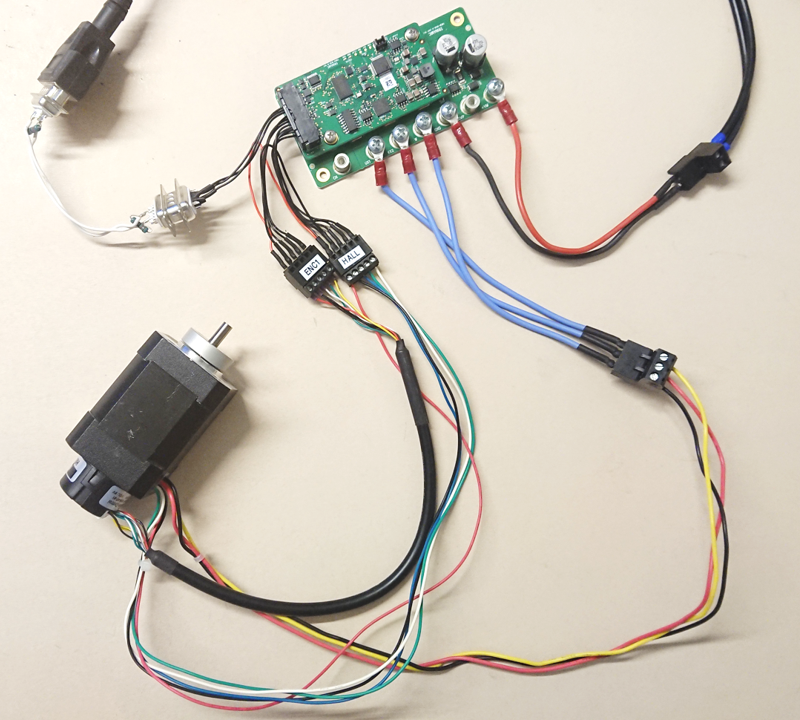
Software
Software Architecture
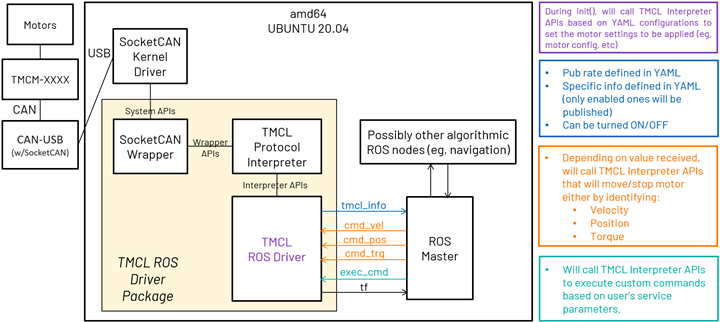
Software Dependencies
Assumptions before building this package:
- Installed ROS Noetic. If not, follow these steps.
- Setup catkin workspace (with workspace folder named as “catkin_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “noetic”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/catkin_ws/src
# Clone to directory "adi_tmcl" which is the package name
$ git clone <copied SSH o HTTPS link here> adi_tmcl
Build
Do proper exports first:
$ source /opt/ros/<ROS version>/setup.bash
Where:
- “ROS version” is the user’s actual ROS version
File truncated at 100 lines see the full file
Changelog for package tmcl_ros
4.0.2 (2024-11-11)
- Added support for TMCM-1316. Rename Maintainer name in package.xml
- Contributors: CAcarADI, jmacagba
4.0.1 (2024-07-15)
- Merge branch 'noetic' of https://github.com/analogdevicesinc/tmcl_ros into noetic
- Added support for TMCM-2611 Co-Authored-By: Christian Joseph Acar <<124771470+CAcarADI@users.noreply.github.com>> Co-Authored-By: Jamila Macagba <<124771486+jmacagba@users.noreply.github.com>>
- Contributors: mmaralit-adi
4.0.0 (2023-12-13)
- Updated README.md to mention both tmcl_ros (previous package name) and adi_tmcl
- Updated package name and transforms
- Updated package name in compliance to official ROS release, and updated transforms for multi-axes TMCs
- Contributors: mmaralit-adi, jmacagba
3.0.2 (2023-10-06)
- Removed obsolete modules and updated analog.com references in README
- Updated to:
- Remove obsolete modules
- Update analog.com pages in README.md
- Update CMakeLists.txt to make sure other drivers that has same names as socket_can_wrapper will not cause conflicts; and also add install support
- Contributors: mmaralit-adi, jmacagba
v3.0.1-noetic (2023-09-26)
- Remove obsolete modules, update copyrights' years, update
package.xml version and cleanup CMakeLists.txt
- Remove obsolete modules
- Update copyrights' years
- Update package.xml version
- Clean-up comments in CMakeLists.txt
- Contributors: CAcarADI, mmaralit-adi
v3.0.0-noetic (2023-09-18)
- Adaptations on ROS coding standard and synchronization with upcoming
ROS2 Driver version of this
- Adaptations on ROS coding standards
- Synchronization of handling between this ROS1 Driver and the up-for-release ROS2 Driver version
- Added handling for SIGTERM and SIGKILL
- Removed support for TMC variants that are either obsolete, no CAN support, or no Motor Drive
- Contributors: CAcarADI, mmaralit-adi
v2.0.0-noetic (2023-07-26)
- Added config files for other BLDC and Stepper type motors Added config files for various BLDC and Stepper type motors, added support for stepper type motors, and also added support for multiple TMC connections
- Contributors: CAcarADI, mmaralit-adi
v1.0.2-noetic (2023-05-11)
- Adjustments for position scaler and status, and added script to get
all axis parameter values Updated for the following features:
- Added Position Scaler consideration in position calculation (higher prio than encoder steps)
- Added Status information in published /tmc_info
- Changed default /tmc_info publish rate to 10Hz (previously 1Hz)
- Added GAP_params.sh to query YAML's axis parameters' values
- Made TMCM-1636 FollowEepromConfig as False and then used calibrated values in YAML
- Updated Maintainer email
- Added TMCM-1636 actual setup image (for reference).
- Contributors: CAcarADI, mmaralit-adi
v1.0.1-noetic (2023-02-10)
- Added support for TMCM-1617
- Contributors: CAcarADI
v1.0.0-noetic (2023-02-10)
- Adding v1.0.0 of tmcl_ros, ROS1, Noetic
- Contains official ROS Driver for Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol
- Supported TMC boards: TMCM-1636
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Noetic (Ubuntu 20.04)
- Supported platform: Intel x86 64-bit (amd64)
- Contributors: CAcarADI, mmaralit-adi
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/tmcm_0930.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm0930]
- period [default: 100]
- launch/tmcm_1140.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1140]
- period [default: 100]
- launch/tmcm_1160.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1160]
- period [default: 100]
- launch/tmcm_1180.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1180]
- period [default: 100]
- launch/tmcm_1230.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1230]
- period [default: 100]
- launch/tmcm_1231.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1231]
- period [default: 100]
- launch/tmcm_1240.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1240]
- period [default: 100]
- launch/tmcm_1241.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1241]
- period [default: 100]
- launch/tmcm_1260.launch
- Copyright (c) 2022-2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1260]
- period [default: 100]
- launch/tmcm_1270.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1270]
- period [default: 100]
- launch/tmcm_1276.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1276]
- period [default: 100]
- launch/tmcm_1278.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1278]
- period [default: 100]
- launch/tmcm_1311.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1311]
- period [default: 100]
- launch/tmcm_1316.launch
- Copyright (c) 2024 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1316]
- period [default: 100]
- launch/tmcm_1378.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1378]
- period [default: 100]
- launch/tmcm_1617.launch
- Copyright (c) 2022-2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1617]
- period [default: 100]
- launch/tmcm_1633.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1633]
- period [default: 100]
- launch/tmcm_1636.launch
- Copyright (c) 2022-2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1636]
- period [default: 100]
- launch/tmcm_1637.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1637]
- period [default: 100]
- launch/tmcm_1638.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1638]
- period [default: 100]
- launch/tmcm_1670.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm1670]
- period [default: 100]
- launch/tmcm_2611.launch
- Copyright (c) 2022-2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm2611]
- period [default: 100]
- launch/tmcm_3110.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm3110]
- period [default: 100]
- launch/tmcm_3212.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm3212]
- period [default: 100]
- launch/tmcm_3230.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm3230]
- period [default: 100]
- launch/tmcm_3351.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm3351]
- period [default: 100]
- launch/tmcm_343.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm343]
- period [default: 100]
- launch/tmcm_351.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm351]
- period [default: 100]
- launch/tmcm_6110.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm6110]
- period [default: 100]
- launch/tmcm_6212.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm6212]
- period [default: 100]
- launch/tmcm_6214.launch
- Copyright (c) 2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
-
- ns_prefix [default: tmcm1]
- tmcl_base_name [default: tmcm6214]
- period [default: 100]