
|
|
Repository Summary
| Checkout URI | https://github.com/ika-rwth-aachen/etsi_its_messages.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
etsi_its_messages


![]()
![]()
![]()
ROS / ROS 2 Support for ETSI ITS Messages for V2X Communication
The etsi_its_messages package stack allows to use standardized ETSI ITS messages for V2X communication in ROS / ROS 2 systems. Apart from the definition of ROS message equivalents to the ETSI ITS standards, this package stack also includes a conversion node for serializing the messages to and from a UDP payload, as well as RViz plugins for visualization (ROS 2 only).
All message definitions and conversion functions are automatically generated based on the ASN.1 definitions of the standardized ETSI ITS messages.
[!IMPORTANT]
This repository is open-sourced and maintained by the Institute for Automotive Engineering (ika) at RWTH Aachen University.
V2X Communication is one of many research topics within our Vehicle Intelligence & Automated Driving domain.
If you would like to learn more about how we can support your advanced driver assistance and automated driving efforts, feel free to reach out to us!
:email: opensource@ika.rwth-aachen.de
- Concept
- Supported ETSI ITS Messages
- Packages
- Installation
- Conversion Node
- Sample Messages
- Access Functions
- Code Generation
- V2AIX Dataset / Citation
- Acknowledgements
- Notice
[!NOTE]
Instructions for using the etsi_its_messages as a ROS driver for common V2X OBU/RSU hardware such as the Cohda Wireless MK5 are found inDRIVERS.md.
Concept
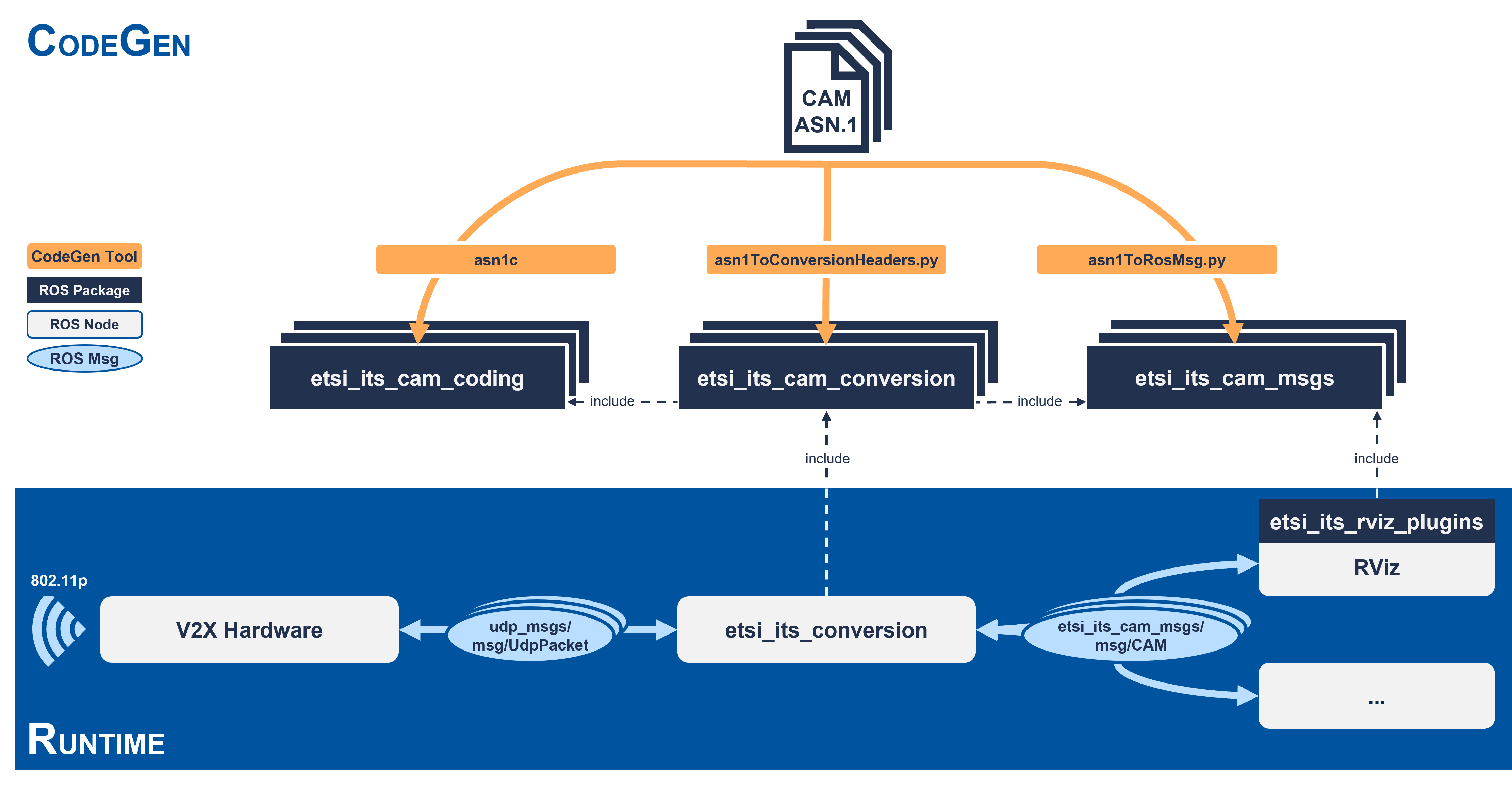
The core concept of the etsi_its_messages is to automatically generate the ROS support code based on the ASN.1 definitions of the standardized ETSI ITS messages (CodeGen). The ROS support then allows ROS applications to not only natively use corresponding ETSI ITS message types, but to also exchange encoded ETSI ITS message payloads with the world outside of ROS (Runtime).
A given ASN.1 definition is used to generate corresponding C-structures, ROS message definitions, as well as conversion functions between those two formats (see Code Generation).
During runtime, the etsi_its_conversion ROS node converts incoming UDP payloads into corresponding ROS messages and vice versa (see Conversion Node). The ROS equivalents of the ETSI ITS messages can be used in any downstream ROS applications or visualized using the provided RViz plugins.
Supported ETSI ITS Messages
| Status | Acronym | Name | EN Specification | TS Specification | TR Specification |
|---|---|---|---|---|---|
| :white_check_mark: | CAM | Cooperative Awareness Message | EN 302 637-2 V1.4.1 (ASN.1) | TS 103 900 V2.1.1 (ASN.1) | - |
| :white_check_mark: | CPM | Collective Perception Message | - | TS 103 324 V2.1.1 (ASN.1) | - |
| :white_check_mark: | DENM | Decentralized Environmental Notification Message | EN 302 637-3 V1.3.1 (ASN.1) | TS 103 831 V2.2.1 (ASN.1) | - |
| :white_check_mark: | MAPEM | Map Extended Message | - | TS 103 301 V2.1.1 (ASN.1) | - |
| :white_check_mark: | MCM | Maneuver Coordination Message | - | - | TR 103 578 proposal by Ulm University |
| :white_check_mark: | SPATEM | Signal Phase and Timing Extended Message | - | TS 103 301 V2.1.1 (ASN.1) | - |
| :white_check_mark: | VAM | VRU Awareness Message | - | TS 103 300-3 V2.2.1 (ASN.1) | - |
[!NOTE] Message types that are standardized as European Norms (EN) are available as, e.g.,
etsi_its_cam_msgs. New message types or revisions of existing message types that are only specified in Technical Specifications (TS) are available as, e.g.,etsi_its_cpm_ts_msgs.
[!WARNING] Limitations
RegionalExtension(defined inISO-TS-19091-addgrp-C-2018.asn) is not covered in ROS-equivalents of MAPEM and SPATEM messages
Packages
```bash etsi_its_messages ├── etsi_its_coding │ ├── etsi_its_coding # metapackage including all coding packages │ ├── etsi_its_cam_coding │ ├── etsi_its_cam_ts_coding │ ├── etsi_its_cpm_ts_coding │ ├── etsi_its_denm_coding │ ├── etsi_its_denm_ts_coding │ ├── etsi_its_mapem_ts_coding │ ├── etsi_its_mcm_uulm_coding │ ├── etsi_its_spatem_ts_coding │ └── etsi_its_vam_ts_coding ├── etsi_its_conversion │ ├── etsi_its_conversion # conversion node depending on all conversion packages │ ├── etsi_its_cam_conversion │ ├── etsi_its_cam_ts_conversion │ ├── etsi_its_cpm_ts_conversion │ ├── etsi_its_denm_conversion │ ├── etsi_its_denm_ts_conversion │ ├── etsi_its_mapem_ts_conversion │ ├── etsi_its_mcm_uulm_conversion │ ├── etsi_its_primitives_conversion │ ├── etsi_its_spatem_ts_conversion
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
Repository Summary
| Checkout URI | https://github.com/ika-rwth-aachen/etsi_its_messages.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
etsi_its_messages
![]()
![]()
![]()
ROS / ROS 2 Support for ETSI ITS Messages for V2X Communication
The etsi_its_messages package stack allows to use standardized ETSI ITS messages for V2X communication in ROS / ROS 2 systems. Apart from the definition of ROS message equivalents to the ETSI ITS standards, this package stack also includes a conversion node for serializing the messages to and from a UDP payload, as well as RViz plugins for visualization (ROS 2 only).
All message definitions and conversion functions are automatically generated based on the ASN.1 definitions of the standardized ETSI ITS messages.
[!IMPORTANT]
This repository is open-sourced and maintained by the Institute for Automotive Engineering (ika) at RWTH Aachen University.
V2X Communication is one of many research topics within our Vehicle Intelligence & Automated Driving domain.
If you would like to learn more about how we can support your advanced driver assistance and automated driving efforts, feel free to reach out to us!
:email: opensource@ika.rwth-aachen.de
- Concept
- Supported ETSI ITS Messages
- Packages
- Installation
- Conversion Node
- Sample Messages
- Access Functions
- Code Generation
- V2AIX Dataset / Citation
- Acknowledgements
- Notice
[!NOTE]
Instructions for using the etsi_its_messages as a ROS driver for common V2X OBU/RSU hardware such as the Cohda Wireless MK5 are found inDRIVERS.md.
Concept
The core concept of the etsi_its_messages is to automatically generate the ROS support code based on the ASN.1 definitions of the standardized ETSI ITS messages (CodeGen). The ROS support then allows ROS applications to not only natively use corresponding ETSI ITS message types, but to also exchange encoded ETSI ITS message payloads with the world outside of ROS (Runtime).
A given ASN.1 definition is used to generate corresponding C-structures, ROS message definitions, as well as conversion functions between those two formats (see Code Generation).
During runtime, the etsi_its_conversion ROS node converts incoming UDP payloads into corresponding ROS messages and vice versa (see Conversion Node). The ROS equivalents of the ETSI ITS messages can be used in any downstream ROS applications or visualized using the provided RViz plugins.
Supported ETSI ITS Messages
| Status | Acronym | Name | EN Specification | TS Specification | TR Specification |
|---|---|---|---|---|---|
| :white_check_mark: | CAM | Cooperative Awareness Message | EN 302 637-2 V1.4.1 (ASN.1) | TS 103 900 V2.1.1 (ASN.1) | - |
| :white_check_mark: | CPM | Collective Perception Message | - | TS 103 324 V2.1.1 (ASN.1) | - |
| :white_check_mark: | DENM | Decentralized Environmental Notification Message | EN 302 637-3 V1.3.1 (ASN.1) | TS 103 831 V2.2.1 (ASN.1) | - |
| :white_check_mark: | MAPEM | Map Extended Message | - | TS 103 301 V2.1.1 (ASN.1) | - |
| :white_check_mark: | MCM | Maneuver Coordination Message | - | - | TR 103 578 proposal by Ulm University |
| :white_check_mark: | SPATEM | Signal Phase and Timing Extended Message | - | TS 103 301 V2.1.1 (ASN.1) | - |
| :white_check_mark: | VAM | VRU Awareness Message | - | TS 103 300-3 V2.2.1 (ASN.1) | - |
[!NOTE] Message types that are standardized as European Norms (EN) are available as, e.g.,
etsi_its_cam_msgs. New message types or revisions of existing message types that are only specified in Technical Specifications (TS) are available as, e.g.,etsi_its_cpm_ts_msgs.
[!WARNING] Limitations
RegionalExtension(defined inISO-TS-19091-addgrp-C-2018.asn) is not covered in ROS-equivalents of MAPEM and SPATEM messages
Packages
```bash etsi_its_messages ├── etsi_its_coding │ ├── etsi_its_coding # metapackage including all coding packages │ ├── etsi_its_cam_coding │ ├── etsi_its_cam_ts_coding │ ├── etsi_its_cpm_ts_coding │ ├── etsi_its_denm_coding │ ├── etsi_its_denm_ts_coding │ ├── etsi_its_mapem_ts_coding │ ├── etsi_its_mcm_uulm_coding │ ├── etsi_its_spatem_ts_coding │ └── etsi_its_vam_ts_coding ├── etsi_its_conversion │ ├── etsi_its_conversion # conversion node depending on all conversion packages │ ├── etsi_its_cam_conversion │ ├── etsi_its_cam_ts_conversion │ ├── etsi_its_cpm_ts_conversion │ ├── etsi_its_denm_conversion │ ├── etsi_its_denm_ts_conversion │ ├── etsi_its_mapem_ts_conversion │ ├── etsi_its_mcm_uulm_conversion │ ├── etsi_its_primitives_conversion │ ├── etsi_its_spatem_ts_conversion
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
Repository Summary
| Checkout URI | https://github.com/ika-rwth-aachen/etsi_its_messages.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
etsi_its_messages
![]()
![]()
![]()
ROS / ROS 2 Support for ETSI ITS Messages for V2X Communication
The etsi_its_messages package stack allows to use standardized ETSI ITS messages for V2X communication in ROS / ROS 2 systems. Apart from the definition of ROS message equivalents to the ETSI ITS standards, this package stack also includes a conversion node for serializing the messages to and from a UDP payload, as well as RViz plugins for visualization (ROS 2 only).
All message definitions and conversion functions are automatically generated based on the ASN.1 definitions of the standardized ETSI ITS messages.
[!IMPORTANT]
This repository is open-sourced and maintained by the Institute for Automotive Engineering (ika) at RWTH Aachen University.
V2X Communication is one of many research topics within our Vehicle Intelligence & Automated Driving domain.
If you would like to learn more about how we can support your advanced driver assistance and automated driving efforts, feel free to reach out to us!
:email: opensource@ika.rwth-aachen.de
- Concept
- Supported ETSI ITS Messages
- Packages
- Installation
- Conversion Node
- Sample Messages
- Access Functions
- Code Generation
- V2AIX Dataset / Citation
- Acknowledgements
- Notice
[!NOTE]
Instructions for using the etsi_its_messages as a ROS driver for common V2X OBU/RSU hardware such as the Cohda Wireless MK5 are found inDRIVERS.md.
Concept
The core concept of the etsi_its_messages is to automatically generate the ROS support code based on the ASN.1 definitions of the standardized ETSI ITS messages (CodeGen). The ROS support then allows ROS applications to not only natively use corresponding ETSI ITS message types, but to also exchange encoded ETSI ITS message payloads with the world outside of ROS (Runtime).
A given ASN.1 definition is used to generate corresponding C-structures, ROS message definitions, as well as conversion functions between those two formats (see Code Generation).
During runtime, the etsi_its_conversion ROS node converts incoming UDP payloads into corresponding ROS messages and vice versa (see Conversion Node). The ROS equivalents of the ETSI ITS messages can be used in any downstream ROS applications or visualized using the provided RViz plugins.
Supported ETSI ITS Messages
| Status | Acronym | Name | EN Specification | TS Specification | TR Specification |
|---|---|---|---|---|---|
| :white_check_mark: | CAM | Cooperative Awareness Message | EN 302 637-2 V1.4.1 (ASN.1) | TS 103 900 V2.1.1 (ASN.1) | - |
| :white_check_mark: | CPM | Collective Perception Message | - | TS 103 324 V2.1.1 (ASN.1) | - |
| :white_check_mark: | DENM | Decentralized Environmental Notification Message | EN 302 637-3 V1.3.1 (ASN.1) | TS 103 831 V2.2.1 (ASN.1) | - |
| :white_check_mark: | MAPEM | Map Extended Message | - | TS 103 301 V2.1.1 (ASN.1) | - |
| :white_check_mark: | MCM | Maneuver Coordination Message | - | - | TR 103 578 proposal by Ulm University |
| :white_check_mark: | SPATEM | Signal Phase and Timing Extended Message | - | TS 103 301 V2.1.1 (ASN.1) | - |
| :white_check_mark: | VAM | VRU Awareness Message | - | TS 103 300-3 V2.2.1 (ASN.1) | - |
[!NOTE] Message types that are standardized as European Norms (EN) are available as, e.g.,
etsi_its_cam_msgs. New message types or revisions of existing message types that are only specified in Technical Specifications (TS) are available as, e.g.,etsi_its_cpm_ts_msgs.
[!WARNING] Limitations
RegionalExtension(defined inISO-TS-19091-addgrp-C-2018.asn) is not covered in ROS-equivalents of MAPEM and SPATEM messages
Packages
```bash etsi_its_messages ├── etsi_its_coding │ ├── etsi_its_coding # metapackage including all coding packages │ ├── etsi_its_cam_coding │ ├── etsi_its_cam_ts_coding │ ├── etsi_its_cpm_ts_coding │ ├── etsi_its_denm_coding │ ├── etsi_its_denm_ts_coding │ ├── etsi_its_mapem_ts_coding │ ├── etsi_its_mcm_uulm_coding │ ├── etsi_its_spatem_ts_coding │ └── etsi_its_vam_ts_coding ├── etsi_its_conversion │ ├── etsi_its_conversion # conversion node depending on all conversion packages │ ├── etsi_its_cam_conversion │ ├── etsi_its_cam_ts_conversion │ ├── etsi_its_cpm_ts_conversion │ ├── etsi_its_denm_conversion │ ├── etsi_its_denm_ts_conversion │ ├── etsi_its_mapem_ts_conversion │ ├── etsi_its_mcm_uulm_conversion │ ├── etsi_its_primitives_conversion │ ├── etsi_its_spatem_ts_conversion
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
Repository Summary
| Checkout URI | https://github.com/ika-rwth-aachen/etsi_its_messages.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
etsi_its_messages
![]()
![]()
![]()
ROS / ROS 2 Support for ETSI ITS Messages for V2X Communication
The etsi_its_messages package stack allows to use standardized ETSI ITS messages for V2X communication in ROS / ROS 2 systems. Apart from the definition of ROS message equivalents to the ETSI ITS standards, this package stack also includes a conversion node for serializing the messages to and from a UDP payload, as well as RViz plugins for visualization (ROS 2 only).
All message definitions and conversion functions are automatically generated based on the ASN.1 definitions of the standardized ETSI ITS messages.
[!IMPORTANT]
This repository is open-sourced and maintained by the Institute for Automotive Engineering (ika) at RWTH Aachen University.
V2X Communication is one of many research topics within our Vehicle Intelligence & Automated Driving domain.
If you would like to learn more about how we can support your advanced driver assistance and automated driving efforts, feel free to reach out to us!
:email: opensource@ika.rwth-aachen.de
- Concept
- Supported ETSI ITS Messages
- Packages
- Installation
- Conversion Node
- Sample Messages
- Access Functions
- Code Generation
- V2AIX Dataset / Citation
- Acknowledgements
- Notice
[!NOTE]
Instructions for using the etsi_its_messages as a ROS driver for common V2X OBU/RSU hardware such as the Cohda Wireless MK5 are found inDRIVERS.md.
Concept
The core concept of the etsi_its_messages is to automatically generate the ROS support code based on the ASN.1 definitions of the standardized ETSI ITS messages (CodeGen). The ROS support then allows ROS applications to not only natively use corresponding ETSI ITS message types, but to also exchange encoded ETSI ITS message payloads with the world outside of ROS (Runtime).
A given ASN.1 definition is used to generate corresponding C-structures, ROS message definitions, as well as conversion functions between those two formats (see Code Generation).
During runtime, the etsi_its_conversion ROS node converts incoming UDP payloads into corresponding ROS messages and vice versa (see Conversion Node). The ROS equivalents of the ETSI ITS messages can be used in any downstream ROS applications or visualized using the provided RViz plugins.
Supported ETSI ITS Messages
| Status | Acronym | Name | EN Specification | TS Specification | TR Specification |
|---|---|---|---|---|---|
| :white_check_mark: | CAM | Cooperative Awareness Message | EN 302 637-2 V1.4.1 (ASN.1) | TS 103 900 V2.1.1 (ASN.1) | - |
| :white_check_mark: | CPM | Collective Perception Message | - | TS 103 324 V2.1.1 (ASN.1) | - |
| :white_check_mark: | DENM | Decentralized Environmental Notification Message | EN 302 637-3 V1.3.1 (ASN.1) | TS 103 831 V2.2.1 (ASN.1) | - |
| :white_check_mark: | MAPEM | Map Extended Message | - | TS 103 301 V2.1.1 (ASN.1) | - |
| :white_check_mark: | MCM | Maneuver Coordination Message | - | - | TR 103 578 proposal by Ulm University |
| :white_check_mark: | SPATEM | Signal Phase and Timing Extended Message | - | TS 103 301 V2.1.1 (ASN.1) | - |
| :white_check_mark: | VAM | VRU Awareness Message | - | TS 103 300-3 V2.2.1 (ASN.1) | - |
[!NOTE] Message types that are standardized as European Norms (EN) are available as, e.g.,
etsi_its_cam_msgs. New message types or revisions of existing message types that are only specified in Technical Specifications (TS) are available as, e.g.,etsi_its_cpm_ts_msgs.
[!WARNING] Limitations
RegionalExtension(defined inISO-TS-19091-addgrp-C-2018.asn) is not covered in ROS-equivalents of MAPEM and SPATEM messages
Packages
```bash etsi_its_messages ├── etsi_its_coding │ ├── etsi_its_coding # metapackage including all coding packages │ ├── etsi_its_cam_coding │ ├── etsi_its_cam_ts_coding │ ├── etsi_its_cpm_ts_coding │ ├── etsi_its_denm_coding │ ├── etsi_its_denm_ts_coding │ ├── etsi_its_mapem_ts_coding │ ├── etsi_its_mcm_uulm_coding │ ├── etsi_its_spatem_ts_coding │ └── etsi_its_vam_ts_coding ├── etsi_its_conversion │ ├── etsi_its_conversion # conversion node depending on all conversion packages │ ├── etsi_its_cam_conversion │ ├── etsi_its_cam_ts_conversion │ ├── etsi_its_cpm_ts_conversion │ ├── etsi_its_denm_conversion │ ├── etsi_its_denm_ts_conversion │ ├── etsi_its_mapem_ts_conversion │ ├── etsi_its_mcm_uulm_conversion │ ├── etsi_its_primitives_conversion │ ├── etsi_its_spatem_ts_conversion
File truncated at 100 lines see the full file