
|
xbot_talker package from xbot repoxbot xbot_bringup xbot_description xbot_driver xbot_face xbot_msgs xbot_navi xbot_node xbot_safety_controller xbot_talker xbot_tools |
|
|
Package Summary
| Tags | No category tags. |
| Version | 3.2.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/DroidAITech/xbot.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-06-18 |
| Dev Status | MAINTAINED |
| CI status | Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Roc Wang
- wangxiaoyun
Authors
- wangxiaoyun
xbot_talker
一.简介
xbot_talker是用于重德智能XBot-U科研教学平台机器人的语音交互ROS程序包。
该程序包提供了百度在线语音识别、科大讯飞离线唤醒、科大讯飞语音识别、科大讯飞离线命令词识别、科大讯飞离线语音合成以及机器人控制、图灵对话机器人模块的调用,以及完整的智能语音交互系统,能够通过语音控制机器人动作、导航以及对话聊天等功能。
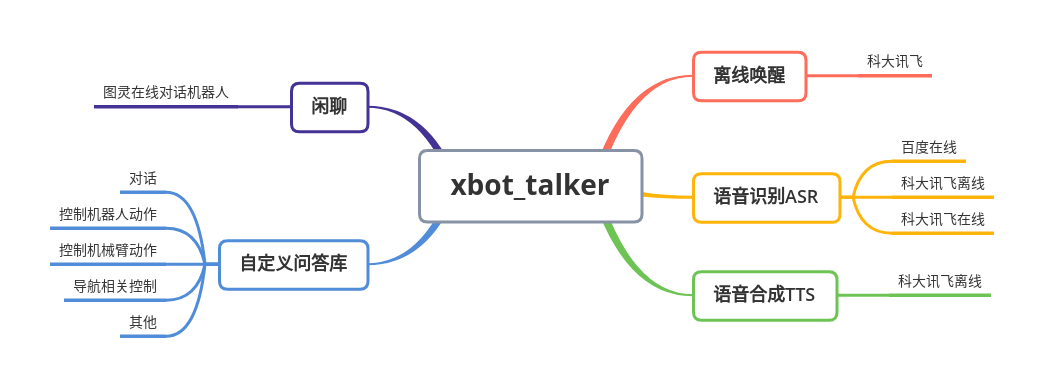
特性:
- 1.模块化。语音识别、语音唤醒、语音合成和语言处理等都做到了模块化,各个模块间通过ROS话题或服务进行通信,方便测试以及用户开发自己的插件。
- 2.灵活可配置,用户可选择启动一个或多个模块,可定制机器人的名字、唤醒词,添加、修改离线命令词和问答库。
- 3.已提供一套集成离线语音识别、离线语音合成以及离线语言处理的启动程序和参数配置,可在Xbot-U系列机器人上应用。
- 4.除了Xbot-U系列机器人,该功能包同时可应用于任何基于ROS开发的机器人。
二.安装依赖
下载功能包后请先连通网络,进入到xbot_talker功能包所在的工作空间,通过以下命令安装依赖:
sudo apt install sox
sudo apt install libsox-fmt-all
rosdep install --from-paths src --ignore-src -r -y
安装完成后编译代码:
catkin_make
三.语音交互使用说明
功能包里已配置好talker.launch启动文件,可以启动离线命令词识别、语音合成以及离线nlp处理功能,实现离线对话交互以及对机器人的控制。同时也提供了集成所有功能的xbot_talker.launch启动文件。如果需要使用在线识别和语音唤醒等功能,请参考后面的语音交互进阶使用手册修改参数和设置。本章节只介绍基础功能的使用。
语音交互模块的启动已集成到xbot-u.launch中随机器人开机启动,使用该模块只需在机器人或者从机上调用相应的service,并修改相应的请求参数,即可打开语音交互模块。
注意:与3.2.4之前版本兼容的接口/xbot/play和/xbot/chat的使用在本章节末尾。
使用前,先调用/talker/version服务查看语音交互软件版本:
rosservice call /talker/version "empty: {}"
本手册适用于3.2.4及以上版本的代码。
3.1文字合成语音并播放
用户可以调用/talker/play服务将文字合成语音并播放(语音合成),具体指令为:
rosservice call /talker/play "loop_times: 0
mode: 0
audio_path: ''
tts_text: '语音合成测试'"
其中您可以将‘语音合成测试’替换为任何您想要播放的文字,也可修改loop_times设置循环播放次数。语音播放成功后,终端会输出相应的提示:
success: True
在输入指令时,您可以使用Tab键来自动补全指令,以避免指令输入错误。补全指令后您只需修改相应参数即可。
请求的参数说明:
- loop_times:表示循环播放的次数,0表示只播放一遍,1表示共播放2遍…loop_times表示共播放(loop_times+1)遍。
- mode:播放模式。0表示把文字(tts_text)合成语音并播放;1表示播放指定的文件(audio_path)。
- audio_path:mode = 1时播放的音频文件。
- tts_text:mode =0 时转化的文字。
3.2播放指定的语音文件
用户可以调用/talker/play服务播放指定音频文件,具体指令为:
rosservice call /talker/play "loop_times: 0
mode: 1
audio_path: '~/catkin_ws/src/xbot/xbot_talker/defaultconfig/audio/default_tts_test.wav'
tts_text: ''"
其中audio_path后面是您想要播放的语音文件的路径,该路径为机器人本机上的绝对目录位置,可自行修改。
在输入指令时,您可以使用Tab键来自动补全指令,以避免指令输入错误。补全指令后您只需修改相应参数即可。
3.3对话和语音控制
/talker/chat服务提供了与机器人进行对话以及通过语音控制机器人的交互功能。运行以下命令,即可进行交互:
rosservice call /talker/chat "start_chat: true"
执行该指令后,机器人会发出“嘟”声,您在听到声音之后即可以开始与机器人交谈。工作模式如下图:
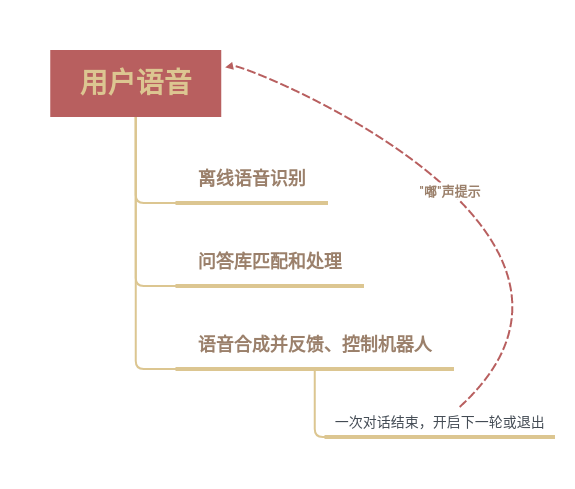
结束对话时需要告诉机器人“关闭”或”关闭对话”。在机器人接收到语音输入的关闭指令后,会结束对话。
初始配置的机器人已经能够回答一些简单的问题,包括:你好、你多大了、你是谁、你叫什么名字、你会什么、介绍一下你自己等,以及对机器人的基本控制,”向前走一步”、”向后走一步”、”向左旋转”、”向右旋转”等,同时预留了控制机械臂和导航模块的接口。
注意:请在机器人响应完毕,听到“嘟”声结束后立即说命令词。预留的控制机械臂的相关命令有一定的响应时间(7s)左右,关于机械臂控制和导航相关的命令,请参考机械臂和导航使用手册。导航相关命令词会自动退出chat模式。
基本的交互内容如下表:
| 关键词 | 识别成功后语音回答 | 动作响应 | 备注 |
|---|---|---|---|
| 向前走/向前走一步 | 无 | 机器人向前一段距离 | |
| 向后走/向后走一步 | 无 | 机器人后退一段距离 | |
| 向左旋转/向左转 | 无 | 机器人向左旋转 | |
| 向右旋转/向右转 | 好的 | 机器人向右旋转 | |
| 你好 | 你好,我是机器人小德 | 无 | |
| 你叫什么名字 | 我叫小德 | 无 | |
| 你多大了/你几岁了 | 我已经三岁啦 | 无 | |
| 你来自哪里 | 我来自重德智能 | 无 | |
| 介绍一下你自己/你自我介绍一下/介绍你自己/你是谁 | 我是来自重德智能的机器人小德。集科研、教育、服务于一身。能为您提供自主导航、人脸识别、语音交互和自动抓取等多种功能。 | 无 | |
| 你会什么/你会做什么 | 我具有自主导航、人脸识别、语音交互、自动抓取等多种功能,将是您学习和科研的好帮手。 | 无 | |
| 介绍一下重德智能/介绍重德智能 | 北京中科重德智能科技有限公司是源自中国科学院的创业公司。公司致力于研发智能机器人科研教学平台。提供稳定可靠、安全高效的机器人软硬件一体化解决方案 | 无 | |
| 你爸爸是谁 | 我爸爸是重德智能帅气可爱的工程师哟 | 无 | |
| 你妈妈是谁 | 我妈妈是重德智能漂亮可爱的工程师哟 | 无 | |
| 很高兴见到你 | 和你的每一次遇见都是我的小确幸。 | 无 | |
| 你喜欢什么 | 我最喜欢和你聊天啦 | 无 | |
| 向上看 | 无 | 头部俯仰云台向上偏转40度 | |
| 向下看 | 无 | 头部俯仰云台向下偏转40度 | |
| 向左看 | 无 | 头部水平云台向左偏转60度 | |
| 向右看 | 无 | 头部水平云台向右偏转60度 | |
| 向前看/转台回到初始位置 | 无 | 头部两个云台回到初始0度位置 | |
| 开始对话/开始多轮交互模式 | 好的,我们可以进行连续多次对话交互啦。 | 无 | 在语音唤醒模式下,该关键词会开始多轮交互模式。 |
| 陪我聊天/能和我聊会天吗 | 好啊,我们可以聊天啦。 | 无 | 在语音唤醒模式下,该关键词会开始多轮交互模式。 |
| 再见 | 期待与你的下次相遇 | 退出/chat服务,结束对话。 | 在语音唤醒模式下,该关键词会退出多轮交互模式,进入等待唤醒状态。 |
| 关闭/关闭对话/关闭多轮交互模式/退出聊天/退出对话 | 好的,小德先退下啦。 | 退出/xbot/chat服务,结束对话。 | 在语音唤醒模式下,该关键词会退出多轮交互模式,进入等待唤醒状态。 |
| 抬起左手/放下左手/抬起右手/放下右手/抬起手臂/放下手臂 | 好的 | 控制机械臂的抬起和放下 | 若购买xbot-arm产品,会看到机械臂动作,请确保机械臂0.7m范围内无障碍物。 |
| 张开左手/闭合左手/张开右手/闭合右手/张开手爪/闭合手爪 | 好的 | 控制机械臂手爪的打开和闭合 | |
| 参观/带我参观 | 好的。请跟我来 | 向/demo/leave、/demo/visit和/welcome/yes话题发布true,同时自动退出对话 | 用户可自行编写脚本订阅这三个话题其中一个,开始导航。 |
| 开始导航 | 收到。 | 向/demo/leave、/demo/visit和/welcome/yes话题发布true,同时自动退出对话交互 | 用户可自行编写脚本订阅这三个话题其中一个,开始导航。 |
| 暂停导航 | 收到 | 向/demo/navi_pause话题发布true,同时自动退出对话 | |
| 继续导航 | 收到 | 向/demo/navi_continue话题发布true,同时自动退出对话 | |
| 回到原点/回到起点/小德你回去吧 | 好的,我将返回起始点。 | 向/demo/navi_to_pose话题发布”Starting_Point“,同时自动退出对话 | 目标点的信息需与导航json文件内的设置对应。 |
| 去第一个目标点 | 收到 | 向/demo/navi_to_pose话题发布”First_Goal“,同时自动退出对话 | 目标点的信息需与导航json文件内的设置对应。 |
| 去第二个目标点 | 收到 | 向/demo/navi_to_pose话题发布”Second_Goal“,同时自动退出对话 | 目标点的信息需与导航json文件内的设置对应。 |
| 去第三个目标点 | 收到 | 向/demo/navi_to_pose话题发布”Third_Goal“,同时自动退出对话 | 目标点的信息需与导航json文件内的设置对应。 |
| 去第四个目标点 | 收到 | 向/demo/navi_to_pose话题发布”Fourth_Goal“,同时自动退出对话 | 目标点的信息需与导航json文件内的设置对应。 |
| 去第五个目标点 | 收到 | 向/demo/navi_to_pose话题发布”Fifth_Goal“,同时自动退出对话 | 目标点的信息需与导航json文件内的设置对应。 |
| 带我找方总/去方总办公室 | 无 | 向/demo/navi_to_pose话题发布”fang_zong_office“,同时自动退出对话 | 目标点的信息需与导航json文件内的设置对应。 |
| 带我找常总/去常总办公室 | 无 | 向/demo/navi_to_pose话题发布”chang_zong_office“,同时自动退出对话 | 目标点的信息需与导航json文件内的设置对应。 |
3.4兼容3.2.4版本之前接口使用说明
播放指定的音频文件
让机器人播放语音文件,mode:1 表示播放指定目录下的音频文件,具体的指令为:
rosservice call /xbot/play "loop: false
mode: 1
audio_path: '~/catkin_ws/src/xbot/xbot_talker/defaultconfig/audio/default_tts_test.wav'
tts_text: ''"
其中audio_path后面是您想要播放的语音文件的路径,该路径为机器人本机上的绝对目录位置,可自行修改。
将输入的文字转化为语音
您可以让机器人播放您输入的文字,只需要在机器人终端中输入如下指令启动/xbot/play服务即可,mode:2 表示播放模式为将文字转化为语音:
rosservice call /xbot/play "loop: false
mode: 2
audio_path: ''
tts_text: '请和我打招呼'"
其中您可以将‘请和我打招呼’替换为任何您想要播放的文字。语音播放成功后,终端会输出相应的提示:
让机器人播放语音文件,mode:1 表示播放指定目录下的音频文件,具体的指令为:
success: True
在输入指令时,您可以使用Tab键来自动补全指令,以避免指令输入错误。补全指令后您只需修改相应参数即可。
对话和语音控制
/xbot/chat服务提供了与机器人进行对话以及通过语音控制机器人的交互功能。运行以下命令,即可进行交互:
rosservice call /xbot/chat "start_chat: true"
执行该指令后,机器人会在一段时间内发出“嘟——嘟——”声,您在听到声音之后即可以开始与机器人交谈。
结束对话时需要告诉机器人“关闭”。在机器人接收到语音输入的关闭指令后,会结束对话。
其他手册
- 《如何添加或修改对话内容》:xbot_talker/doc/how_to_modify_QA_library.md
- 《xbot_talker各个模块完整说明》:xbot_talker/doc/description_of_each_module.md
联系我们
商务合作:bd@droid.ac.cn
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rospy | |
| std_msgs | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| xbot | |
| xbot_bringup | |
| xbot_node |
Launch files
- launch/awaken_module.launch
- launch/tts_module.launch
- launch/talker.launch
- launch/asr_module.launch
- launch/xbot_talker.launch
- launch/nlp_module.launch
- tests/asr_test/launch/usefiles-asr.launch
- tests/asr_test/launch/two_channel_recog.launch
- tests/asr_test/launch/mic_recog.launch
- tests/asr_test/launch/one_channel_recog.launch
Messages
Services
- srv/deploy_dialogue.srv
- srv/chat.srv
- srv/add_dialogue.srv
- srv/XbotTts.srv
- srv/roolback_dialogue.srv
- srv/CallPlay.srv
- srv/EnableASR.srv
- srv/call_asr.srv
- srv/CallChat.srv
- srv/CallVersion.srv
- srv/play.srv
- srv/keyword_config.srv
- srv/call_action.srv
- srv/history_record.srv
- srv/nlpdialog_config.srv
- srv/call_actionmode.srv