
|
urdf_sim_tutorial package from urdf_sim_tutorial repourdf_sim_tutorial |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros/urdf_sim_tutorial.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2023-10-04 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- David V. Lu!!
Authors
- David V. Lu!!
- Paul Bovbel
urdf_sim_tutorial
See the tutorials over at http://wiki.ros.org/urdf_tutorial
Please download the URDF simulation tutorial from github or using a package manager
sudo apt install ros-$ROS_DISTRO-urdf-sim-tutorial
Nonfunctional Gazebo Interface
We can spawn the model we already created into Gazebo using gazebo.launch.py
ros2 launch urdf_sim_tutorial gazebo.launch.py
This launch file
- Loads the urdf from the macro tutorial and publishes it as a topic (
/robot_description) - Launches an empty Gazebo world
- Runs the script to read the urdf from the topic and spawn it in Gazebo.
- By default, the Gazebo GUI will also be displayed, and look like this:
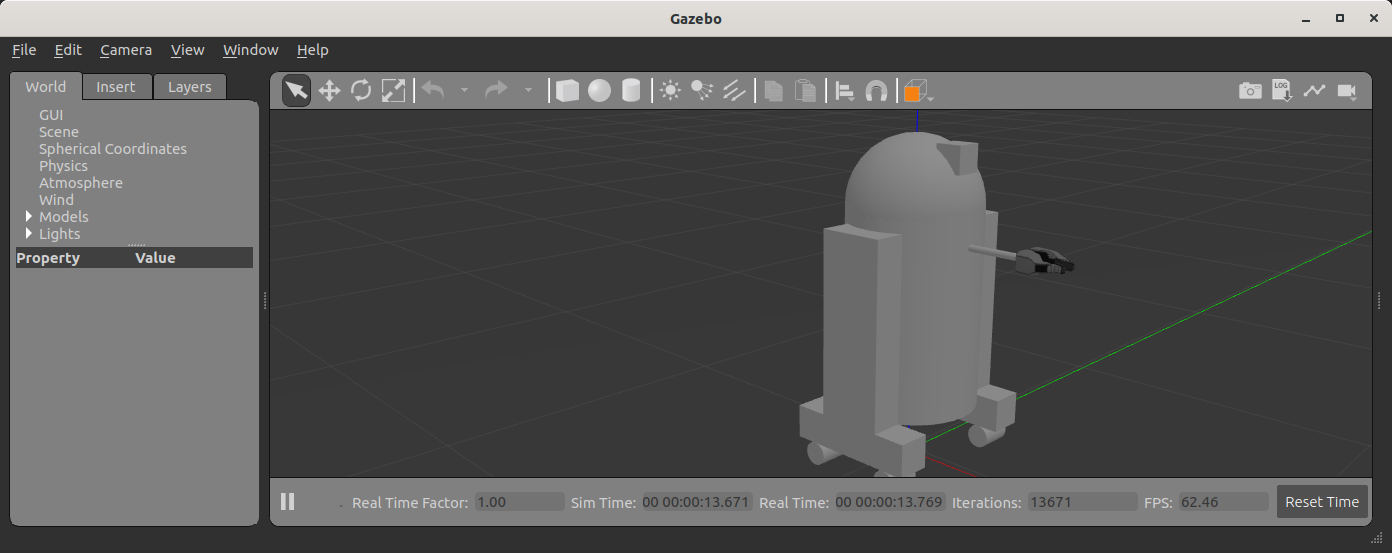
However, it doesn't do anything, and is missing lots of key information that ROS would need to use this robot. Previously we had been using joint_state_publisher to specify the pose of each joint. However, the robot itself should provide that information in the real world or in Gazebo. Yet without specifying that, Gazebo doesn't know to publish that information.
To get the robot to be interactive (with you and ROS), we need to specify two things: Plugins and Transmissions.
Side note: Configuring Meshes
If you are following along at home with your own robot, or something else is amiss, the meshes may be missing from your model in the Gazebo GUI (i.e. the gripper meshes are not there). This may also cause Gazebo to take several seconds to start up after the splash screen appears because it is checking the internet for missing models.
This is because your URDF package needs to explicitly tell Gazebo where to load the meshes from. We do this by modifying the package.xml of the package where our URDF meshes live to include a new export.
<export>
<build_type>ament_cmake</build_type>
<gazebo_ros gazebo_model_path="${prefix}/.."/>
</export>
The reasoning behind the exact value of the gazebo_model_path attribute is a separate issue, but suffice to say, setting it to this value will work assuming
* Your mesh filenames are specified in the URDF using the package://package_name/possible_folder/filename.ext syntax.
* The meshes are installed (via CMake) into the proper share folder.
Gazebo Plugin
To get ROS 2 to interact with Gazebo, we have to dynamically link to the ROS library that will tell Gazebo what to do. Theoretically, this allows for other Robot Operating Systems to interact with Gazebo in a generic way. In practice, its just ROS.
Specifically, Gazebo / ROS 2 interaction all happens by linking to a ROS 2 Control library, with new URDF tags.
We specify the following in the URDF, right before the closing </robot> tag:
<ros2_control name="GazeboSystem" type="system">
<hardware>
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
</hardware>
<joint name="head_swivel" />
</ros2_control>
<gazebo>
<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">
<parameters>$(find urdf_sim_tutorial)/config/09a-minimal.yaml</parameters>
</plugin>
</gazebo>
Notes:
* The <gazebo> and <plugin> tags work the same way they did in ROS 1.
* We must specify at least one joint for the minimal example to work, but we'll add more later.
The minimal configuration file is:
controller_manager:
ros__parameters:
update_rate: 100
You can see this in 09a-minimal.urdf.xacro and by running
ros2 launch urdf_sim_tutorial 09a-minimal.launch.py
This starts up a /controller_manager node and with the load_controller service, but doesn't add any immediately useful interaction with the robot. For that we need to specify more information in the controller yaml.
Spawning Controllers
Now that we've linked ROS and Gazebo, we need to specify some bits of ROS code that we want to run within Gazebo, which we generically call controllers. Now we can look at a larger example based on this yaml file that specifies our first controller.
controller_manager:
ros__parameters:
update_rate: 100
use_sim_time: true
joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
This controller is found in the joint_state_broadcaster package and publishes the state of the robot's joints into ROS directly from Gazebo.
In 09-joints.launch.py we also add a ros2_control command via ExecuteProcess to start this specific controller.
You can launch this, but its still not quite there.
ros2 launch urdf_sim_tutorial 09-joints.launch.py
This will run the controller and in fact publish on the /joint_states topic, but with nothing in them.
header:
stamp:
sec: 13
nanosec: 331000000
frame_id: ''
name: []
position: []
velocity: []
effort: []
What else do you want Gazebo!? Well, it wants to know more information about the joints.
ROS 2 Control Joint Definitions
For every non-fixed joint, we need to add information about the joint in the ros2_control tag which tells it what interfaces are supported. Let's start with the head joint. Modify the joint tag in your URDF to be the following:
<joint name="head_swivel">
<command_interface name="position" />
<command_interface name="velocity" />
<state_interface name="position"/>
<state_interface name="velocity"/>
</joint>
- Note that the joint name here matches the joint name from the standard URDF
<joint>tag. - For the moment, let us focus on the
state_interfaces, in which we specify that we want to publish both position and velocity of this joint.
You can run this URDF with our previous launch configuration.
ros2 launch urdf_sim_tutorial 09-joints.launch.py urdf_package_path:=urdf/10-firsttransmission.urdf.xacro
Now, the head is displayed properly in RViz because the head joint is listed in the joint_states messages.
header:
stamp:
sec: 4
nanosec: 707000000
frame_id: ''
name:
- head_swivel
position:
- -2.9051283156888985e-08
velocity:
- 7.575990694887896e-06
effort:
- .nan
We could continue adding transmissions for all the non-fixed joints (and we will) so that all the joints are properly published. But, there's more to life than just looking at robots. We want to control them. So, let's get another controller in here.
Joint Control
Here's the next controller config we're adding.
controller_manager:
ros__parameters:
# ... snip ...
head_controller:
type: position_controllers/JointGroupPositionController
head_controller:
ros__parameters:
joints:
- head_swivel
interface_name: position
In English, this is saying to add a new JointGroupPositionControllercalled head_controller, and then, in a new parameter namespace, specify which joints are included and that we are publishing positions. We can do this because we specified <command_interface name="position" /> in the joint tag.
Now we can launch this with the added config and another ros2 control command as before
ros2 launch urdf_sim_tutorial 10-head.launch.py
Now Gazebo is subscribed to a new topic, and you can then control the position of the head by publishing a value in ROS.
ros2 topic pub /head_controller/commands std_msgs/msg/Float64MultiArray "data: [-0.707]"
When this command is published, the position will immediately change to the specified value.
Controlling Multiple Joints and Mimicking
We can change the URDF for the Gripper joints in a similar way, but in this case, we'll associate multiple joints with one controller. The updated ROS parameters are here. We also must update the URDF to include three additional joint interfaces.
To launch this,
ros2 launch urdf_sim_tutorial 12-gripper.launch.py
We can now move the gripper with an array of three floats. Open and out:
ros2 topic pub /gripper_controller/commands std_msgs/msg/Float64MultiArray "data: [0.0, 0.5, 0.5]"
Closed and retracted:
ros2 topic pub /gripper_controller/commands std_msgs/msg/Float64MultiArray "data: [-0.4, 0.0, 0.0]"
This gripper is actually set up in a way that we ALWAYS want the left gripper joint to have the same value as the right gripper joint. We can code this into the URDF and controllers with a few steps.
- Insert
<mimic joint="left_gripper_joint"/>into the URDF definition of theright_gripper_joint(which is done a bit hackily in the xacro here - Insert
<param name="mimic">left_gripper_joint</param>into theros2_controljoint interface forright_gripper_joint. - In our new control parameters, we only list the two joints for the gripper controller, leaving out
right_gripper_joint.
We can launch this with
roslaunch urdf_sim_tutorial 12-gripper.launch.py urdf_package_path:=urdf/12a-mimic-gripper.urdf.xacro
and now we can control it with just two values, e.g.
ros2 topic pub /gripper_controller/commands std_msgs/msg/Float64MultiArray "data: [0.0, 0.5]"
The Wheels on the Droid Go Round and Round
To drive the robot around, we first must specify more interfaces in the ros2_control tag of the URDF for each of the four wheels, however, now only the velocity command interface is required.
We could specify controllers for each of the individual wheels, but where's the fun in that? Instead we want to control all the wheels together. For that, we're going to need a lot more ROS parameters to make use of the DiffDriveController which subscribes to a standard Twist cmd_vel message and moves the robot accordingly.
ros2 launch urdf_sim_tutorial 13-diffdrive.launch.py
In addition to loading the above configuration, this also opens the !RobotSteering panel, allowing you to drive the R2D2 robot around, while also observing its actual behavior (in Gazebo) and it's visualized behavior (in RViz):
Congrats! Now you're simulating robots with URDF.
Changelog for package urdf_sim_tutorial
1.0.0 (2023-10-03)
- Convert Tutorial to ROS 2 (#13)
- Contributors: David V. Lu!!
0.5.0 (2020-05-19)
- Bump CMake version to avoid CMP0048 warning #6
- Contributors: David V. Lu!!, ahcorde
0.4.0 (2018-05-09)
- Add README.md.
- 0.3.0
- Remove r2d2.xacro
- Split Control Tutorials
(#31)
- Saved Splits
- Publish Joints
- 10
- Gripper
- Diff drive
- Install Fixes (#30)
- Split Gazebo Features to New Package urdf_tutorial2
(#28)
- Move everything to subfolder
- New Package
- Rename to urdf_sim_tutorial
- Contributors: Chris Lalancette, David V. Lu, David V. Lu!!
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | ament_cmake | |
| 2 | controller_manager | |
| 2 | diff_drive_controller | |
| 1 | gazebo_ros | |
| 2 | position_controllers | |
| 2 | robot_state_publisher | |
| 2 | rqt_robot_steering | |
| 1 | rviz2 | |
| 1 | urdf_tutorial | |
| 1 | xacro |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged urdf_sim_tutorial at Robotics Stack Exchange
|
|
urdf_sim_tutorial package from urdf_sim_tutorial repourdf_sim_tutorial |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.1 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros/urdf_sim_tutorial.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2023-10-04 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- David V. Lu!!
Authors
- David V. Lu!!
- Paul Bovbel
urdf_sim_tutorial
See the tutorials over at http://wiki.ros.org/urdf_tutorial
Please download the URDF simulation tutorial from github or using a package manager
sudo apt install ros-$ROS_DISTRO-urdf-sim-tutorial
Nonfunctional Gazebo Interface
We can spawn the model we already created into Gazebo using gazebo.launch.py
ros2 launch urdf_sim_tutorial gazebo.launch.py
This launch file
- Loads the urdf from the macro tutorial and publishes it as a topic (
/robot_description) - Launches an empty Gazebo world
- Runs the script to read the urdf from the topic and spawn it in Gazebo.
- By default, the Gazebo GUI will also be displayed, and look like this:
However, it doesn't do anything, and is missing lots of key information that ROS would need to use this robot. Previously we had been using joint_state_publisher to specify the pose of each joint. However, the robot itself should provide that information in the real world or in Gazebo. Yet without specifying that, Gazebo doesn't know to publish that information.
To get the robot to be interactive (with you and ROS), we need to specify two things: Plugins and Transmissions.
Side note: Configuring Meshes
If you are following along at home with your own robot, or something else is amiss, the meshes may be missing from your model in the Gazebo GUI (i.e. the gripper meshes are not there). This may also cause Gazebo to take several seconds to start up after the splash screen appears because it is checking the internet for missing models.
This is because your URDF package needs to explicitly tell Gazebo where to load the meshes from. We do this by modifying the package.xml of the package where our URDF meshes live to include a new export.
<export>
<build_type>ament_cmake</build_type>
<gazebo_ros gazebo_model_path="${prefix}/.."/>
</export>
The reasoning behind the exact value of the gazebo_model_path attribute is a separate issue, but suffice to say, setting it to this value will work assuming
* Your mesh filenames are specified in the URDF using the package://package_name/possible_folder/filename.ext syntax.
* The meshes are installed (via CMake) into the proper share folder.
Gazebo Plugin
To get ROS 2 to interact with Gazebo, we have to dynamically link to the ROS library that will tell Gazebo what to do. Theoretically, this allows for other Robot Operating Systems to interact with Gazebo in a generic way. In practice, its just ROS.
Specifically, Gazebo / ROS 2 interaction all happens by linking to a ROS 2 Control library, with new URDF tags.
We specify the following in the URDF, right before the closing </robot> tag:
<ros2_control name="GazeboSystem" type="system">
<hardware>
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
</hardware>
<joint name="head_swivel" />
</ros2_control>
<gazebo>
<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">
<parameters>$(find urdf_sim_tutorial)/config/09a-minimal.yaml</parameters>
</plugin>
</gazebo>
Notes:
* The <gazebo> and <plugin> tags work the same way they did in ROS 1.
* We must specify at least one joint for the minimal example to work, but we'll add more later.
The minimal configuration file is:
controller_manager:
ros__parameters:
update_rate: 100
You can see this in 09a-minimal.urdf.xacro and by running
ros2 launch urdf_sim_tutorial 09a-minimal.launch.py
This starts up a /controller_manager node and with the load_controller service, but doesn't add any immediately useful interaction with the robot. For that we need to specify more information in the controller yaml.
Spawning Controllers
Now that we've linked ROS and Gazebo, we need to specify some bits of ROS code that we want to run within Gazebo, which we generically call controllers. Now we can look at a larger example based on this yaml file that specifies our first controller.
controller_manager:
ros__parameters:
update_rate: 100
use_sim_time: true
joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
This controller is found in the joint_state_broadcaster package and publishes the state of the robot's joints into ROS directly from Gazebo.
In 09-joints.launch.py we also add a ros2_control command via ExecuteProcess to start this specific controller.
You can launch this, but its still not quite there.
ros2 launch urdf_sim_tutorial 09-joints.launch.py
This will run the controller and in fact publish on the /joint_states topic, but with nothing in them.
header:
stamp:
sec: 13
nanosec: 331000000
frame_id: ''
name: []
position: []
velocity: []
effort: []
What else do you want Gazebo!? Well, it wants to know more information about the joints.
ROS 2 Control Joint Definitions
For every non-fixed joint, we need to add information about the joint in the ros2_control tag which tells it what interfaces are supported. Let's start with the head joint. Modify the joint tag in your URDF to be the following:
<joint name="head_swivel">
<command_interface name="position" />
<command_interface name="velocity" />
<state_interface name="position"/>
<state_interface name="velocity"/>
</joint>
- Note that the joint name here matches the joint name from the standard URDF
<joint>tag. - For the moment, let us focus on the
state_interfaces, in which we specify that we want to publish both position and velocity of this joint.
You can run this URDF with our previous launch configuration.
ros2 launch urdf_sim_tutorial 09-joints.launch.py urdf_package_path:=urdf/10-firsttransmission.urdf.xacro
Now, the head is displayed properly in RViz because the head joint is listed in the joint_states messages.
header:
stamp:
sec: 4
nanosec: 707000000
frame_id: ''
name:
- head_swivel
position:
- -2.9051283156888985e-08
velocity:
- 7.575990694887896e-06
effort:
- .nan
We could continue adding transmissions for all the non-fixed joints (and we will) so that all the joints are properly published. But, there's more to life than just looking at robots. We want to control them. So, let's get another controller in here.
Joint Control
Here's the next controller config we're adding.
controller_manager:
ros__parameters:
# ... snip ...
head_controller:
type: position_controllers/JointGroupPositionController
head_controller:
ros__parameters:
joints:
- head_swivel
interface_name: position
In English, this is saying to add a new JointGroupPositionControllercalled head_controller, and then, in a new parameter namespace, specify which joints are included and that we are publishing positions. We can do this because we specified <command_interface name="position" /> in the joint tag.
Now we can launch this with the added config and another ros2 control command as before
ros2 launch urdf_sim_tutorial 10-head.launch.py
Now Gazebo is subscribed to a new topic, and you can then control the position of the head by publishing a value in ROS.
ros2 topic pub /head_controller/commands std_msgs/msg/Float64MultiArray "data: [-0.707]"
When this command is published, the position will immediately change to the specified value.
Controlling Multiple Joints and Mimicking
We can change the URDF for the Gripper joints in a similar way, but in this case, we'll associate multiple joints with one controller. The updated ROS parameters are here. We also must update the URDF to include three additional joint interfaces.
To launch this,
ros2 launch urdf_sim_tutorial 12-gripper.launch.py
We can now move the gripper with an array of three floats. Open and out:
ros2 topic pub /gripper_controller/commands std_msgs/msg/Float64MultiArray "data: [0.0, 0.5, 0.5]"
Closed and retracted:
ros2 topic pub /gripper_controller/commands std_msgs/msg/Float64MultiArray "data: [-0.4, 0.0, 0.0]"
This gripper is actually set up in a way that we ALWAYS want the left gripper joint to have the same value as the right gripper joint. We can code this into the URDF and controllers with a few steps.
- Insert
<mimic joint="left_gripper_joint"/>into the URDF definition of theright_gripper_joint(which is done a bit hackily in the xacro here - Insert
<param name="mimic">left_gripper_joint</param>into theros2_controljoint interface forright_gripper_joint. - In our new control parameters, we only list the two joints for the gripper controller, leaving out
right_gripper_joint.
We can launch this with
roslaunch urdf_sim_tutorial 12-gripper.launch.py urdf_package_path:=urdf/12a-mimic-gripper.urdf.xacro
and now we can control it with just two values, e.g.
ros2 topic pub /gripper_controller/commands std_msgs/msg/Float64MultiArray "data: [0.0, 0.5]"
The Wheels on the Droid Go Round and Round
To drive the robot around, we first must specify more interfaces in the ros2_control tag of the URDF for each of the four wheels, however, now only the velocity command interface is required.
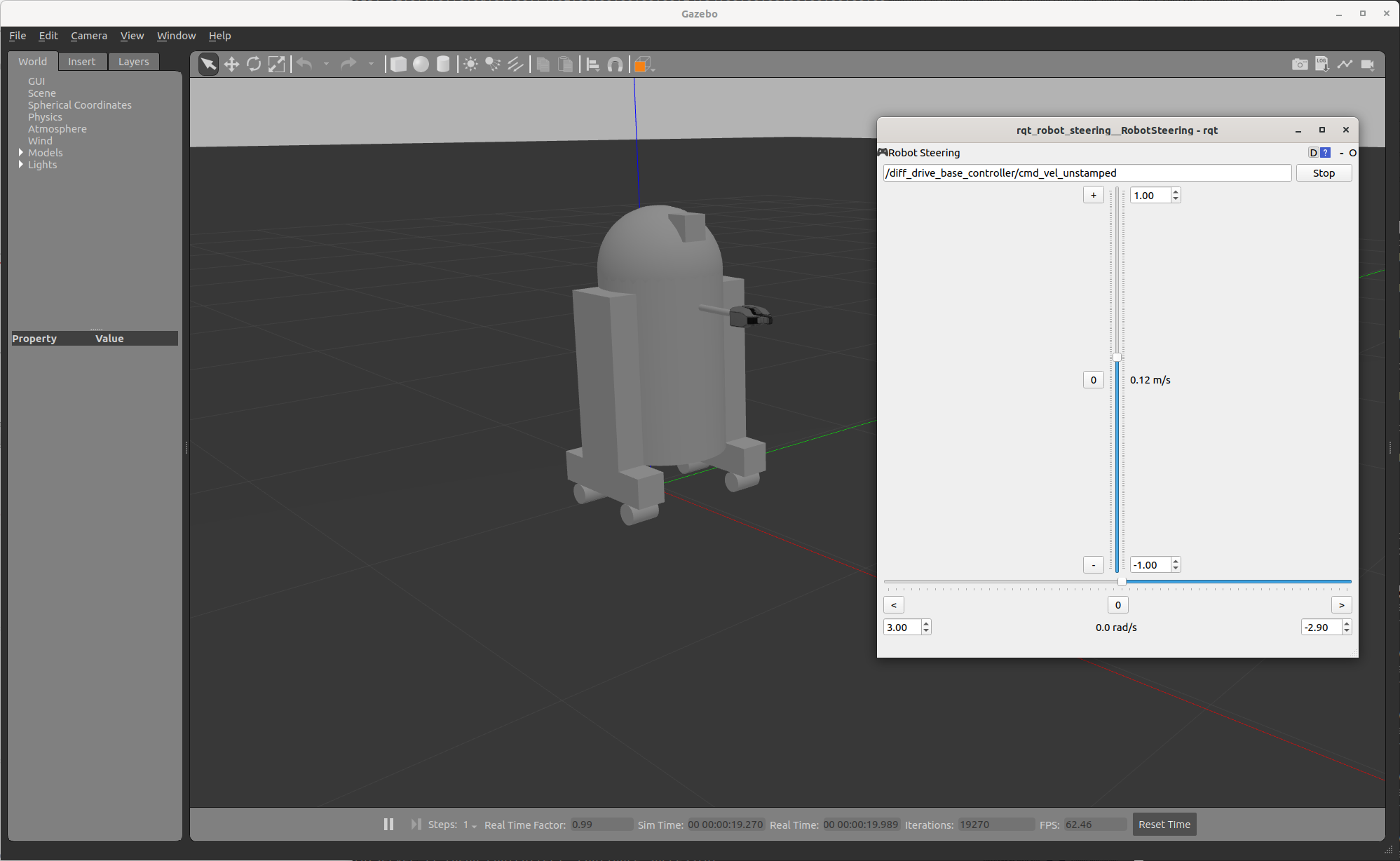
We could specify controllers for each of the individual wheels, but where's the fun in that? Instead we want to control all the wheels together. For that, we're going to need a lot more ROS parameters to make use of the DiffDriveController which subscribes to a standard Twist cmd_vel message and moves the robot accordingly.
ros2 launch urdf_sim_tutorial 13-diffdrive.launch.py
In addition to loading the above configuration, this also opens the !RobotSteering panel, allowing you to drive the R2D2 robot around, while also observing its actual behavior (in Gazebo) and it's visualized behavior (in RViz):
Congrats! Now you're simulating robots with URDF.
Changelog for package urdf_sim_tutorial
1.0.0 (2023-10-03)
- Convert Tutorial to ROS 2 (#13)
- Contributors: David V. Lu!!
0.5.0 (2020-05-19)
- Bump CMake version to avoid CMP0048 warning #6
- Contributors: David V. Lu!!, ahcorde
0.4.0 (2018-05-09)
- Add README.md.
- 0.3.0
- Remove r2d2.xacro
- Split Control Tutorials
(#31)
- Saved Splits
- Publish Joints
- 10
- Gripper
- Diff drive
- Install Fixes (#30)
- Split Gazebo Features to New Package urdf_tutorial2
(#28)
- Move everything to subfolder
- New Package
- Rename to urdf_sim_tutorial
- Contributors: Chris Lalancette, David V. Lu, David V. Lu!!
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | ament_cmake | |
| 2 | controller_manager | |
| 2 | diff_drive_controller | |
| 1 | gazebo_ros | |
| 2 | position_controllers | |
| 2 | robot_state_publisher | |
| 2 | rqt_robot_steering | |
| 1 | rviz2 | |
| 1 | urdf_tutorial | |
| 1 | xacro |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged urdf_sim_tutorial at Robotics Stack Exchange
|
|
urdf_sim_tutorial package from urdf_sim_tutorial repourdf_sim_tutorial |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.5.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros/urdf_sim_tutorial.git |
| VCS Type | git |
| VCS Version | ros1 |
| Last Updated | 2020-12-18 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- David V. Lu!!
Authors
- David V. Lu!!
- Paul Bovbel
urdf_sim_tutorial
See the tutorials over at http://wiki.ros.org/urdf_tutorial
Changelog for package urdf_sim_tutorial
0.5.0 (2020-05-19)
- Bump CMake version to avoid CMP0048 warning #6
- Contributors: David V. Lu!!, ahcorde
0.4.0 (2018-05-09)
- Add README.md.
- 0.3.0
- Remove r2d2.xacro
- Split Control Tutorials
(#31)
- Saved Splits
- Publish Joints
- 10
- Gripper
- Diff drive
- Install Fixes (#30)
- Split Gazebo Features to New Package urdf_tutorial2
(#28)
- Move everything to subfolder
- New Package
- Rename to urdf_sim_tutorial
- Contributors: Chris Lalancette, David V. Lu, David V. Lu!!
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| desktop_full | github-ros-metapackages |
Launch files
- launch/gazebo.launch
-
- paused [default: false]
- use_sim_time [default: true]
- gui [default: true]
- headless [default: false]
- debug [default: false]
- model [default: $(find urdf_tutorial)/urdf/08-macroed.urdf.xacro]
- launch/10-head.launch
-
- model [default: $(find urdf_sim_tutorial)/urdf/10-firsttransmission.urdf.xacro]
- rvizconfig [default: $(find urdf_tutorial)/rviz/urdf.rviz]
- launch/12-gripper.launch
-
- model [default: $(find urdf_sim_tutorial)/urdf/12-gripper.urdf.xacro]
- rvizconfig [default: $(find urdf_tutorial)/rviz/urdf.rviz]
- launch/13-diffdrive.launch
-
- model [default: $(find urdf_sim_tutorial)/urdf/13-diffdrive.urdf.xacro]
- rvizconfig [default: $(find urdf_tutorial)/rviz/urdf.rviz]
- launch/09-joints.launch
-
- model [default: $(find urdf_sim_tutorial)/urdf/09-publishjoints.urdf.xacro]
- rvizconfig [default: $(find urdf_tutorial)/rviz/urdf.rviz]
Messages
Services
Plugins
Recent questions tagged urdf_sim_tutorial at Robotics Stack Exchange
|
|
urdf_sim_tutorial package from urdf_sim_tutorial repourdf_sim_tutorial |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.5.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros/urdf_sim_tutorial.git |
| VCS Type | git |
| VCS Version | ros1 |
| Last Updated | 2020-12-18 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- David V. Lu!!
Authors
- David V. Lu!!
- Paul Bovbel
urdf_sim_tutorial
See the tutorials over at http://wiki.ros.org/urdf_tutorial
Changelog for package urdf_sim_tutorial
0.5.0 (2020-05-19)
- Bump CMake version to avoid CMP0048 warning #6
- Contributors: David V. Lu!!, ahcorde
0.4.0 (2018-05-09)
- Add README.md.
- 0.3.0
- Remove r2d2.xacro
- Split Control Tutorials
(#31)
- Saved Splits
- Publish Joints
- 10
- Gripper
- Diff drive
- Install Fixes (#30)
- Split Gazebo Features to New Package urdf_tutorial2
(#28)
- Move everything to subfolder
- New Package
- Rename to urdf_sim_tutorial
- Contributors: Chris Lalancette, David V. Lu, David V. Lu!!
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| desktop_full | github-ros-metapackages |
Launch files
- launch/gazebo.launch
-
- paused [default: false]
- use_sim_time [default: true]
- gui [default: true]
- headless [default: false]
- debug [default: false]
- model [default: $(find urdf_tutorial)/urdf/08-macroed.urdf.xacro]
- launch/10-head.launch
-
- model [default: $(find urdf_sim_tutorial)/urdf/10-firsttransmission.urdf.xacro]
- rvizconfig [default: $(find urdf_tutorial)/rviz/urdf.rviz]
- launch/12-gripper.launch
-
- model [default: $(find urdf_sim_tutorial)/urdf/12-gripper.urdf.xacro]
- rvizconfig [default: $(find urdf_tutorial)/rviz/urdf.rviz]
- launch/13-diffdrive.launch
-
- model [default: $(find urdf_sim_tutorial)/urdf/13-diffdrive.urdf.xacro]
- rvizconfig [default: $(find urdf_tutorial)/rviz/urdf.rviz]
- launch/09-joints.launch
-
- model [default: $(find urdf_sim_tutorial)/urdf/09-publishjoints.urdf.xacro]
- rvizconfig [default: $(find urdf_tutorial)/rviz/urdf.rviz]