
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 1.0.3 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
1.0.3 (2025-07-24)
- Use console_script entrypoint (#12)
- Contributors: Melvin Wang
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo | |
| urdf_sim_tutorial |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
2.0.0 (2025-07-24)
- Use console_script entrypoint (#12) use console_script entrypoint. resolves inability to run in windows.
- Contributors: Melvin Wang
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 3.0.0 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | kilted |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
3.0.0 (2025-07-24)
- Use console_script entrypoint (#12) use console_script entrypoint. resolves inability to run in windows.
- Contributors: Melvin Wang
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 4.0.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2025-09-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
RQT Robot Steering
This package contains the rqt_robot_steering node, an RQT plugin which publishes a Twist (or TwistStamped) containing X linear and Z angular velocities.
This is intended for 2D navigation scenarios.
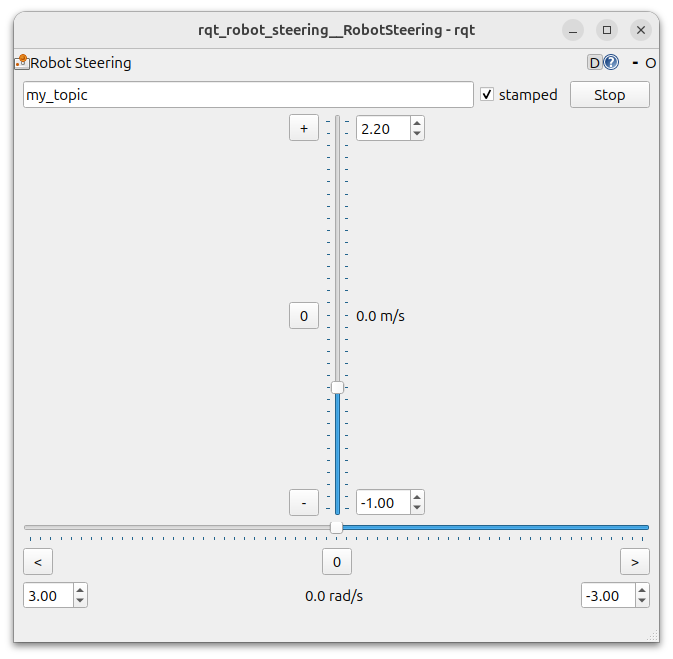
Settings like the topic name and window size are saved to and restored from ~/.config/ros.org/rqt_gui.ini.
Example
ros2 run rqt_robot_steering rqt_robot_steering --ros-args -p default_topic:=my_topic -p default_stamped:=true -p default_vx_max:=2.2
Published Topics
By default, publisheds to /cmd_vel.
The topic name can be changed in the GUI, and will be saved/restored if the GUI is closed cleanly (not Ctrl+C).
You can override this topic name using ROS parameters.
Parameters
-
default_topic(string) - The topic name to publish on -
default_stamped(bool) - Whether to publishTwistorTwistStamped -
default_vx_min(double) - The minimum X velocity in m/s, used by the vertical slider. -
default_vx_max(double) - The maximum X velocity in m/s, used by the vertical slider. -
default_vw_min(double) - The minimum Z velocity in rad/s, used by the horizontal slider. -
default_vw_max(double) - The maximum Z velocity in rad/s, used by the horizontal slider.
Changelog for package rqt_robot_steering
4.0.2 (2025-09-04)
- [rolling] respect param overrides (#28)
- Added CI (#27)
- Contributors: Alejandro Hernández Cordero, Peter Mitrano (AR)
4.0.0 (2025-07-24)
- Added linters (#26)
- Use console_script entrypoint (#12)
- Contributors: Alejandro Hernández Cordero, Melvin Wang
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| geometry_msgs | |
| python_qt_binding | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| ament_xmllint |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 4.0.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2025-09-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
RQT Robot Steering
This package contains the rqt_robot_steering node, an RQT plugin which publishes a Twist (or TwistStamped) containing X linear and Z angular velocities.
This is intended for 2D navigation scenarios.
Settings like the topic name and window size are saved to and restored from ~/.config/ros.org/rqt_gui.ini.
Example
ros2 run rqt_robot_steering rqt_robot_steering --ros-args -p default_topic:=my_topic -p default_stamped:=true -p default_vx_max:=2.2
Published Topics
By default, publisheds to /cmd_vel.
The topic name can be changed in the GUI, and will be saved/restored if the GUI is closed cleanly (not Ctrl+C).
You can override this topic name using ROS parameters.
Parameters
-
default_topic(string) - The topic name to publish on -
default_stamped(bool) - Whether to publishTwistorTwistStamped -
default_vx_min(double) - The minimum X velocity in m/s, used by the vertical slider. -
default_vx_max(double) - The maximum X velocity in m/s, used by the vertical slider. -
default_vw_min(double) - The minimum Z velocity in rad/s, used by the horizontal slider. -
default_vw_max(double) - The maximum Z velocity in rad/s, used by the horizontal slider.
Changelog for package rqt_robot_steering
4.0.2 (2025-09-04)
- [rolling] respect param overrides (#28)
- Added CI (#27)
- Contributors: Alejandro Hernández Cordero, Peter Mitrano (AR)
4.0.0 (2025-07-24)
- Added linters (#26)
- Use console_script entrypoint (#12)
- Contributors: Alejandro Hernández Cordero, Melvin Wang
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_index_python | |
| geometry_msgs | |
| python_qt_binding | |
| rclpy | |
| rqt_gui | |
| rqt_gui_py | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 | |
| ament_xmllint |
System Dependencies
| Name |
|---|
| python3-pytest |
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 1.0.3 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
1.0.3 (2025-07-24)
- Use console_script entrypoint (#12)
- Contributors: Melvin Wang
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo | |
| urdf_sim_tutorial |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 1.0.3 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
1.0.3 (2025-07-24)
- Use console_script entrypoint (#12)
- Contributors: Melvin Wang
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo | |
| urdf_sim_tutorial |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 1.0.3 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-07-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
1.0.3 (2025-07-24)
- Use console_script entrypoint (#12)
- Contributors: Melvin Wang
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo | |
| urdf_sim_tutorial |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | dashing-devel |
| Last Updated | 2025-07-23 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | dashing-devel |
| Last Updated | 2025-07-23 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | dashing-devel |
| Last Updated | 2025-07-23 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | dashing-devel |
| Last Updated | 2025-07-23 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | dashing-devel |
| Last Updated | 2025-07-23 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
1.0.2 (2025-07-07)
- Fixed bugs after adding TwistStamped publishing (simplified) (#23)
- Contributors: Patrik Knaperek
1.0.1 (2025-03-21)
- Publish TwistStamped message optionally (#18)
- remove obsolete CMakeLists.txt
- Contributors: Christoph Fröhlich, Dirk Thomas
1.0.0 (2019-11-15)
- port package to ROS 2 (#7)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo | |
| urdf_sim_tutorial |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 0.5.12 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-10-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
- Srishti Dhamija
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
0.5.12 (2020-10-21)
- fix shebang line for Python 3 (#9)
0.5.11 (2020-03-11)
- bump CMake minimum version to avoid CMP0048 warning
0.5.10 (2019-11-14)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
0.2.14 (2013-04-12)
0.2.13 (2013-04-09)
0.2.12 (2013-04-06 18:22)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo | |
| rqt_robot_plugins |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 0.5.12 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-10-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
- Srishti Dhamija
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
0.5.12 (2020-10-21)
- fix shebang line for Python 3 (#9)
0.5.11 (2020-03-11)
- bump CMake minimum version to avoid CMP0048 warning
0.5.10 (2019-11-14)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
0.2.14 (2013-04-12)
0.2.13 (2013-04-09)
0.2.12 (2013-04-06 18:22)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| rqt_robot_plugins |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 0.5.12 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-10-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
- Srishti Dhamija
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
0.5.12 (2020-10-21)
- fix shebang line for Python 3 (#9)
0.5.11 (2020-03-11)
- bump CMake minimum version to avoid CMP0048 warning
0.5.10 (2019-11-14)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
0.2.14 (2013-04-12)
0.2.13 (2013-04-09)
0.2.12 (2013-04-06 18:22)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo | |
| rqt_robot_plugins |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_plugins reporqt_moveit rqt_nav_view rqt_pose_view rqt_robot_dashboard rqt_robot_monitor rqt_robot_plugins rqt_robot_steering rqt_runtime_monitor rqt_rviz rqt_tf_tree |
ROS Distro
|
Package Summary
| Version | 0.4.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_plugins.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2015-07-10 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Aaron Blasdel
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
0.2.14 (2013-04-12)
0.2.13 (2013-04-09)
0.2.12 (2013-04-06 18:22)
0.2.11 (2013-04-06 18:00)
0.2.10 (2013-04-04)
- Added ability to load default values from ROS parameters. Removed undesired echo \@dawonn
0.2.9 (2013-03-07)
0.2.8 (2013-01-11)
0.2.7 (2012-12-23 15:58)
- pimp robot steering plugin
0.2.6 (2012-12-23 01:57)
0.2.5 (2012-12-21 19:11)
0.2.4 (2012-12-21 01:13)
0.2.3 (2012-12-21 00:24)
0.2.2 (2012-12-20 18:29)
0.2.1 (2012-12-20 17:47)
0.2.0 (2012-12-20 17:39)
- catkinizing
- first public release for Groovy
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| geometry_msgs | |
| rostopic | |
| rqt_gui | |
| rqt_gui_py |
System Dependencies
| Name |
|---|
| python-rospkg |
Dependant Packages
| Name | Deps |
|---|---|
| rqt_robot_plugins |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 0.5.12 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-10-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
- Srishti Dhamija
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
0.5.12 (2020-10-21)
- fix shebang line for Python 3 (#9)
0.5.11 (2020-03-11)
- bump CMake minimum version to avoid CMP0048 warning
0.5.10 (2019-11-14)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
0.2.14 (2013-04-12)
0.2.13 (2013-04-09)
0.2.12 (2013-04-06 18:22)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo | |
| rqt_robot_plugins |
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 0.5.12 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-10-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
- Srishti Dhamija
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
0.5.12 (2020-10-21)
- fix shebang line for Python 3 (#9)
0.5.11 (2020-03-11)
- bump CMake minimum version to avoid CMP0048 warning
0.5.10 (2019-11-14)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
- send zero-value cmd_vel messages only once (#53)
0.3.0 (2013-08-28)
0.2.16 (2013-07-09)
- First public release into Hydro
0.2.15 (2013-04-25)
0.2.14 (2013-04-12)
0.2.13 (2013-04-09)
0.2.12 (2013-04-06 18:22)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_robot_steering at Robotics Stack Exchange
|
|
rqt_robot_steering package from rqt_robot_steering reporqt_robot_steering |
ROS Distro
|
Package Summary
| Version | 0.5.14 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-visualization/rqt_robot_steering.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2025-04-26 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Dirk Thomas
- Aaron Blasdel
- Srishti Dhamija
Authors
- Dirk Thomas
Changelog for package rqt_robot_steering
0.5.14 (2025-04-26)
- Bump cmake_minimum_required to avoid deprecation (#24)
- Contributors: Arne Hitzmann
0.5.13 (2025-04-10)
- make min/max values int (#13)
- Import setup from setuptools instead of distutils.core (#15)
- Update maintainers (#11)
- Contributors: Arne Hitzmann, Lucas Walter, Matthijs van der Burgh, Srishti Dhamija
0.5.12 (2020-10-21)
- fix shebang line for Python 3 (#9)
0.5.11 (2020-03-11)
- bump CMake minimum version to avoid CMP0048 warning
0.5.10 (2019-11-14)
- minor cleanup (#6)
- add Python 3 conditional dependencies (#5)
- style: format code to conform to the PEP8 style (#3)
0.5.9 (2018-02-21)
- always send zero twist when stop button is pressed (#2)
0.5.8 (2017-10-12)
- handle an empty topic string (#1)
0.5.7 (2017-04-25)
0.5.6 (2017-01-24)
0.5.5 (2016-11-02)
0.5.4 (2016-09-19)
0.5.3 (2016-05-16)
0.5.2 (2016-04-29)
0.5.1 (2016-04-28)
0.5.0 (2016-04-27)
- Support Qt 5 (in Kinetic and higher) as well as Qt 4 (in Jade and earlier) (#101)
0.4.3 (2016-03-08)
0.4.2 (2015-07-24)
0.4.1 (2015-04-30)
0.4.0 (2014-11-05)
- update script to use full plugin name
0.3.7 (2014-08-18)
0.3.6 (2014-07-11)
- fix compatibility with Groovy, use queue_size for Python publishers only when available (#67)
0.3.5 (2014-06-02)
- use queue_size for Python publishers
0.3.4 (2014-05-07)
0.3.3 (2014-01-28)
0.3.2 (2014-01-08)
- add groups for rqt plugins (ros-visualization/rqt_common_plugins#167)
0.3.1 (2013-10-09)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| mir_gazebo | |
| rqt_robot_plugins | |
| urdf_sim_tutorial |