
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2022-06-27 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- David V. Lu!!
Authors
color_util
An almost dependency-less library for converting between color spaces
Datatypes
This package contains representations for two different color spaces with two different datatypes in include/color_util/types.h:
* Red-Green-Blue-Alpha (RGBA)
* Hue-Saturation-Value-Alpha (HSVA).
Each of these are represented with two datatypes.
* Four doubles with values ranging [0.0, 1.0]
* Four unsigned chars with values ranging [0, 255].
Note that with unsigned char, the color is represented by a total of 24 bits, which we use for notation. The four resulting types are
* ColorRGBA - RGBA/double
* ColorRGBA24 - RGBA/unsigned char
* ColorHSVA - HSVA/double
* ColorHSVA24 - HSVA/unsigned char
Conversions
With include/color_util/convert.h, you can convert between the above types and to std_msgs::ColorRGBA (which has floating point as its datatype).
Blending
With include/color_util/blend.h, you can create mixtures of two different colors. There are three options.
| Blend Method | Image | Note |
|---|---|---|
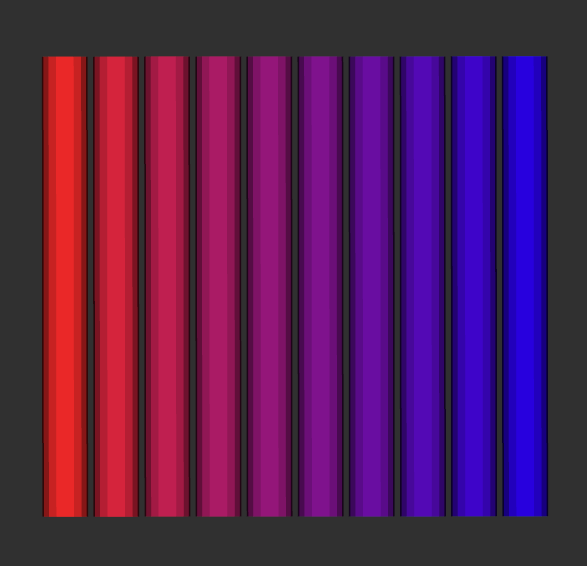
rgbaBlend |
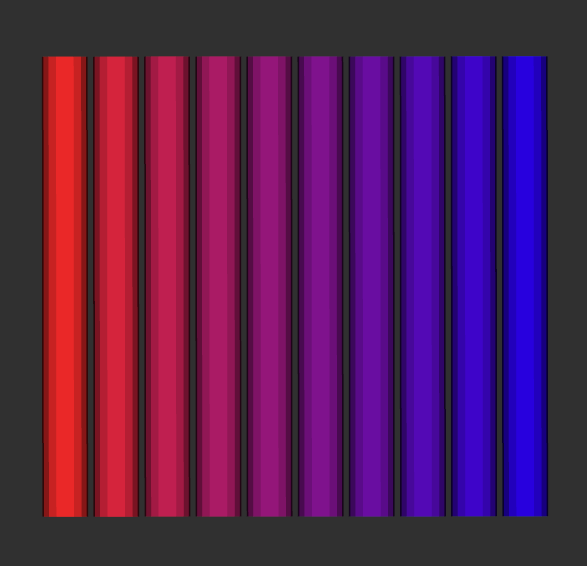 |
Linear interpolation of the RGBA values. Note that the bars in the middle are less saturated than the edges. |
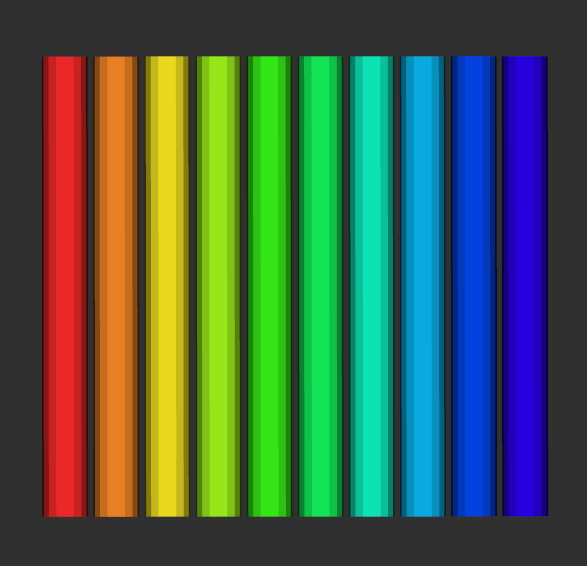
hueBlend |
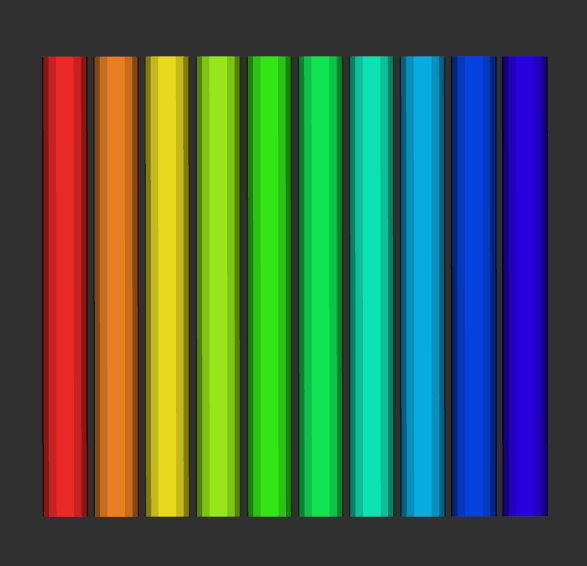 |
Linear interpolation of the HSVA values. In this example, it goes from red (hue=0.0) to blue (hue=0.6) through green (hue=0.3) |
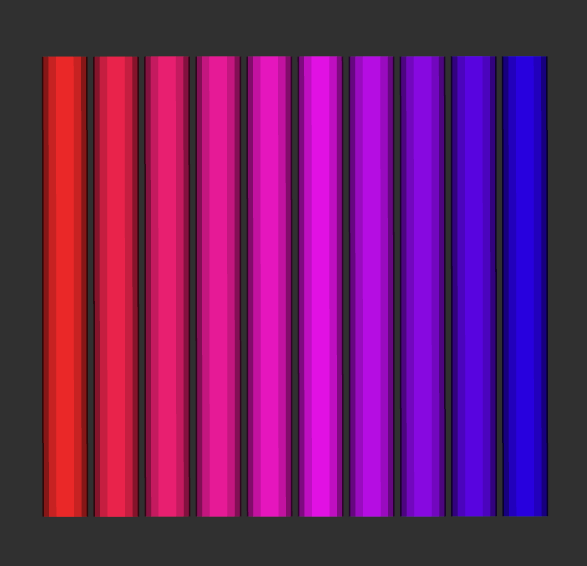
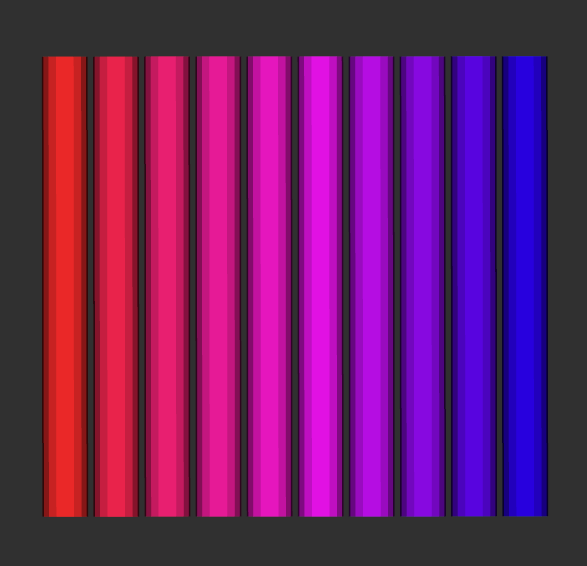
hueBlendPlus |
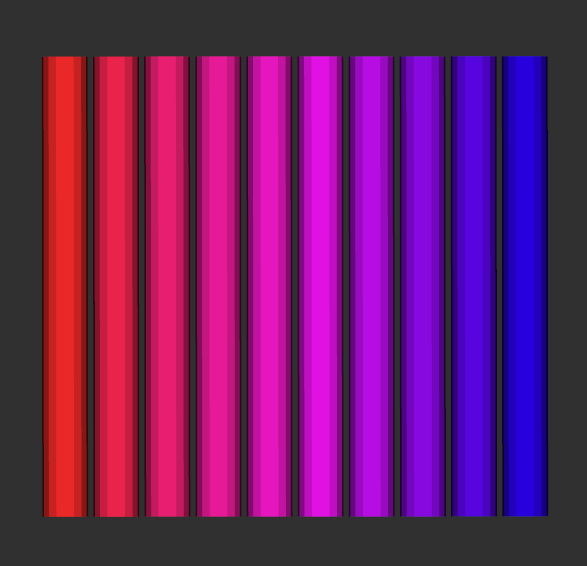 |
Respects the circular nature of the hue representation and uses the shortest linear interpolation of the HSVA values. In this example, it goes from red (hue=0.0) to blue (hue=0.6) through magenta (hue=0.8) |
You can experiment with the blending methods by running roslaunch robot_nav_viz_demos spectrum_demo.launch.
Named Colors
For certain applications, there is a need for accessing specific colors, and it can be annoying to have to specify hex values for each individual color. Other times, you may want to access a list of some number of unique colors. For this, this package provides the named_colors header which allows you to access an array of 55 named colors either through a vector or an enum. The colors are made up of 18 colors, each with a standard, light and dark variant, plus transparent.

The list can be accessed with color_util::getNamedColors() and individual colors can be grabbed with color_util::get(NamedColor::RED)
Wiki Tutorials
Source Tutorials
Launch files
Messages
Services
Plugins
Recent questions tagged color_util at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2021-01-08 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- David V. Lu!!
Authors
color_util
An almost dependency-less library for converting between color spaces
Datatypes
This package contains representations for two different color spaces with two different datatypes in include/color_util/types.h:
* Red-Green-Blue-Alpha (RGBA)
* Hue-Saturation-Value-Alpha (HSVA).
Each of these are represented with two datatypes.
* Four doubles with values ranging [0.0, 1.0]
* Four unsigned chars with values ranging [0, 255].
Note that with unsigned char, the color is represented by a total of 24 bits, which we use for notation. The four resulting types are
* ColorRGBA - RGBA/double
* ColorRGBA24 - RGBA/unsigned char
* ColorHSVA - HSVA/double
* ColorHSVA24 - HSVA/unsigned char
Conversions
With include/color_util/convert.h, you can convert between the above types and to std_msgs::ColorRGBA (which has floating point as its datatype).
Blending
With include/color_util/blend.h, you can create mixtures of two different colors. There are three options.
| Blend Method | Image | Note |
|---|---|---|
rgbaBlend |
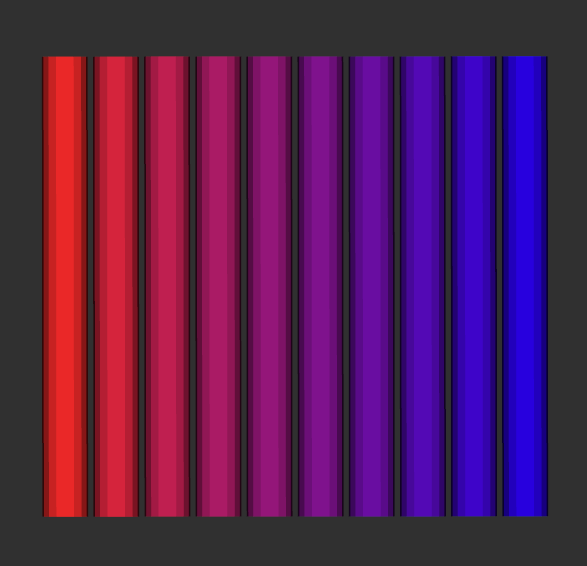 |
Linear interpolation of the RGBA values. Note that the bars in the middle are less saturated than the edges. |
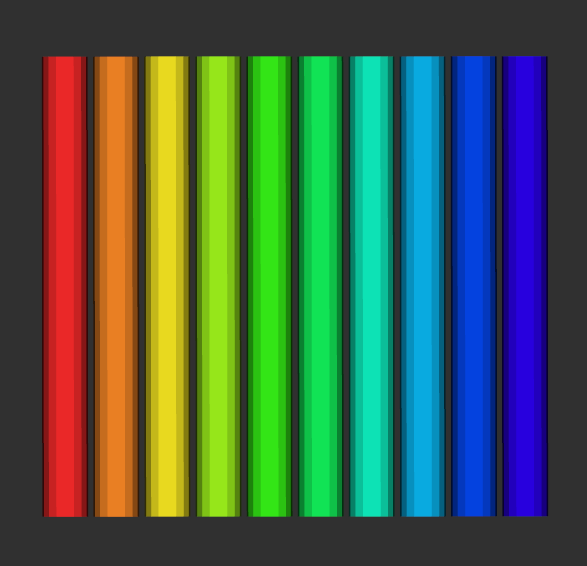
hueBlend |
 |
Linear interpolation of the HSVA values. In this example, it goes from red (hue=0.0) to blue (hue=0.6) through green (hue=0.3) |
hueBlendPlus |
 |
Respects the circular nature of the hue representation and uses the shortest linear interpolation of the HSVA values. In this example, it goes from red (hue=0.0) to blue (hue=0.6) through magenta (hue=0.8) |
You can experiment with the blending methods by running roslaunch robot_nav_viz_demos spectrum_demo.launch.
Named Colors
For certain applications, there is a need for accessing specific colors, and it can be annoying to have to specify hex values for each individual color. Other times, you may want to access a list of some number of unique colors. For this, this package provides the named_colors header which allows you to access an array of 55 named colors either through a vector or an enum. The colors are made up of 18 colors, each with a standard, light and dark variant, plus transparent.

The list can be accessed with color_util::getNamedColors() and individual colors can be grabbed with color_util::get(NamedColor::RED)
Wiki Tutorials
Source Tutorials
Launch files
Messages
Services
Plugins
Recent questions tagged color_util at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.3.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/locusrobotics/robot_navigation.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-07-30 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- David V. Lu!!
Authors
color_util
An almost dependency-less library for converting between color spaces
Datatypes
This package contains representations for two different color spaces with two different datatypes in include/color_util/types.h:
* Red-Green-Blue-Alpha (RGBA)
* Hue-Saturation-Value-Alpha (HSVA).
Each of these are represented with two datatypes.
* Four doubles with values ranging [0.0, 1.0]
* Four unsigned chars with values ranging [0, 255].
Note that with unsigned char, the color is represented by a total of 24 bits, which we use for notation. The four resulting types are
* ColorRGBA - RGBA/double
* ColorRGBA24 - RGBA/unsigned char
* ColorHSVA - HSVA/double
* ColorHSVA24 - HSVA/unsigned char
Conversions
With include/color_util/convert.h, you can convert between the above types and to std_msgs::ColorRGBA (which has floating point as its datatype).
Blending
With include/color_util/blend.h, you can create mixtures of two different colors. There are three options.
| Blend Method | Image | Note |
|---|---|---|
rgbaBlend |
 |
Linear interpolation of the RGBA values. Note that the bars in the middle are less saturated than the edges. |
hueBlend |
 |
Linear interpolation of the HSVA values. In this example, it goes from red (hue=0.0) to blue (hue=0.6) through green (hue=0.3) |
hueBlendPlus |
 |
Respects the circular nature of the hue representation and uses the shortest linear interpolation of the HSVA values. In this example, it goes from red (hue=0.0) to blue (hue=0.6) through magenta (hue=0.8) |
You can experiment with the blending methods by running roslaunch robot_nav_viz_demos spectrum_demo.launch.
Named Colors
For certain applications, there is a need for accessing specific colors, and it can be annoying to have to specify hex values for each individual color. Other times, you may want to access a list of some number of unique colors. For this, this package provides the named_colors header which allows you to access an array of 55 named colors either through a vector or an enum. The colors are made up of 18 colors, each with a standard, light and dark variant, plus transparent.

The list can be accessed with color_util::getNamedColors() and individual colors can be grabbed with color_util::get(NamedColor::RED)