
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
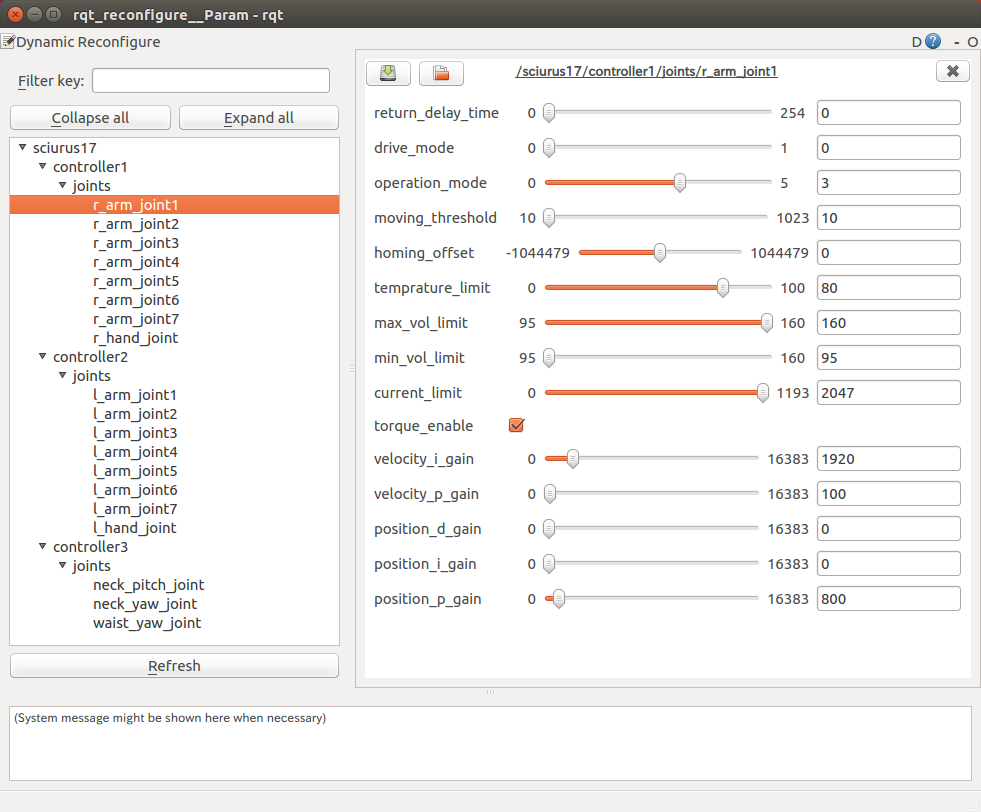
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
right_hand_controller:
- type: "position_controllers/GripperActionController"
+ type: "effort_controllers/GripperActionController"
publish_rate: 500
joint: r_hand_joint
+ gains:
+ r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 }
action_monitor_rate: 10
state_publish_rate: 100
stalled_velocity_threshold: 0.001
goal_tolerance: 0.05
stall_timeout: 0.1
dynamixel_port:
port_name: "/dev/sciurus17spine"
baud_rate: 3000000
joints:
- r_arm_joint1
- r_arm_joint2
- r_arm_joint3
- r_arm_joint4
- r_arm_joint5
- r_arm_joint6
- r_arm_joint7
- r_hand_joint
r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 }
r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 }
r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 }
r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 }
r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
r_arm_joint7: {id: 8, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
- r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
+ r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 0 }
The PID setting values may have different characteristics depending on the ROS environment in which Sciurus17 is controlled.
Caution on current mode
Unlike the position control mode, the angle limit set on the servo becomes invalid in the current control mode.
If the user's own program is not equipped with the appropriate limit action, there is a risk of serious accidents such as damage to the main unit, contact or collision of the main unit with surroundings or the operator, loss of eyesight, or death due to bruising.
The user is responsible for the usage of this product, and they must exercise due care for safety.
RT Corporation has no responsibility for any damage that occured during the usage of the product or this software.
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/sciurus17_control.launch
- launch/controller3.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
- launch/controller2.launch
- launch/controller1.launch
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
right_hand_controller:
- type: "position_controllers/GripperActionController"
+ type: "effort_controllers/GripperActionController"
publish_rate: 500
joint: r_hand_joint
+ gains:
+ r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 }
action_monitor_rate: 10
state_publish_rate: 100
stalled_velocity_threshold: 0.001
goal_tolerance: 0.05
stall_timeout: 0.1
dynamixel_port:
port_name: "/dev/sciurus17spine"
baud_rate: 3000000
joints:
- r_arm_joint1
- r_arm_joint2
- r_arm_joint3
- r_arm_joint4
- r_arm_joint5
- r_arm_joint6
- r_arm_joint7
- r_hand_joint
r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 }
r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 }
r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 }
r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 }
r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
r_arm_joint7: {id: 8, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
- r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
+ r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 0 }
The PID setting values may have different characteristics depending on the ROS environment in which Sciurus17 is controlled.
Caution on current mode
Unlike the position control mode, the angle limit set on the servo becomes invalid in the current control mode.
If the user's own program is not equipped with the appropriate limit action, there is a risk of serious accidents such as damage to the main unit, contact or collision of the main unit with surroundings or the operator, loss of eyesight, or death due to bruising.
The user is responsible for the usage of this product, and they must exercise due care for safety.
RT Corporation has no responsibility for any damage that occured during the usage of the product or this software.
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/sciurus17_control.launch
- launch/controller3.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
- launch/controller2.launch
- launch/controller1.launch
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
right_hand_controller:
- type: "position_controllers/GripperActionController"
+ type: "effort_controllers/GripperActionController"
publish_rate: 500
joint: r_hand_joint
+ gains:
+ r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 }
action_monitor_rate: 10
state_publish_rate: 100
stalled_velocity_threshold: 0.001
goal_tolerance: 0.05
stall_timeout: 0.1
dynamixel_port:
port_name: "/dev/sciurus17spine"
baud_rate: 3000000
joints:
- r_arm_joint1
- r_arm_joint2
- r_arm_joint3
- r_arm_joint4
- r_arm_joint5
- r_arm_joint6
- r_arm_joint7
- r_hand_joint
r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 }
r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 }
r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 }
r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 }
r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
r_arm_joint7: {id: 8, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
- r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 3 }
+ r_hand_joint: {id: 9, center: 2048, home: 2048, effort_const: 1.79, mode: 0 }
The PID setting values may have different characteristics depending on the ROS environment in which Sciurus17 is controlled.
Caution on current mode
Unlike the position control mode, the angle limit set on the servo becomes invalid in the current control mode.
If the user's own program is not equipped with the appropriate limit action, there is a risk of serious accidents such as damage to the main unit, contact or collision of the main unit with surroundings or the operator, loss of eyesight, or death due to bruising.
The user is responsible for the usage of this product, and they must exercise due care for safety.
RT Corporation has no responsibility for any damage that occured during the usage of the product or this software.
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/sciurus17_control.launch
- launch/controller3.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
- launch/controller2.launch
- launch/controller1.launch