
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
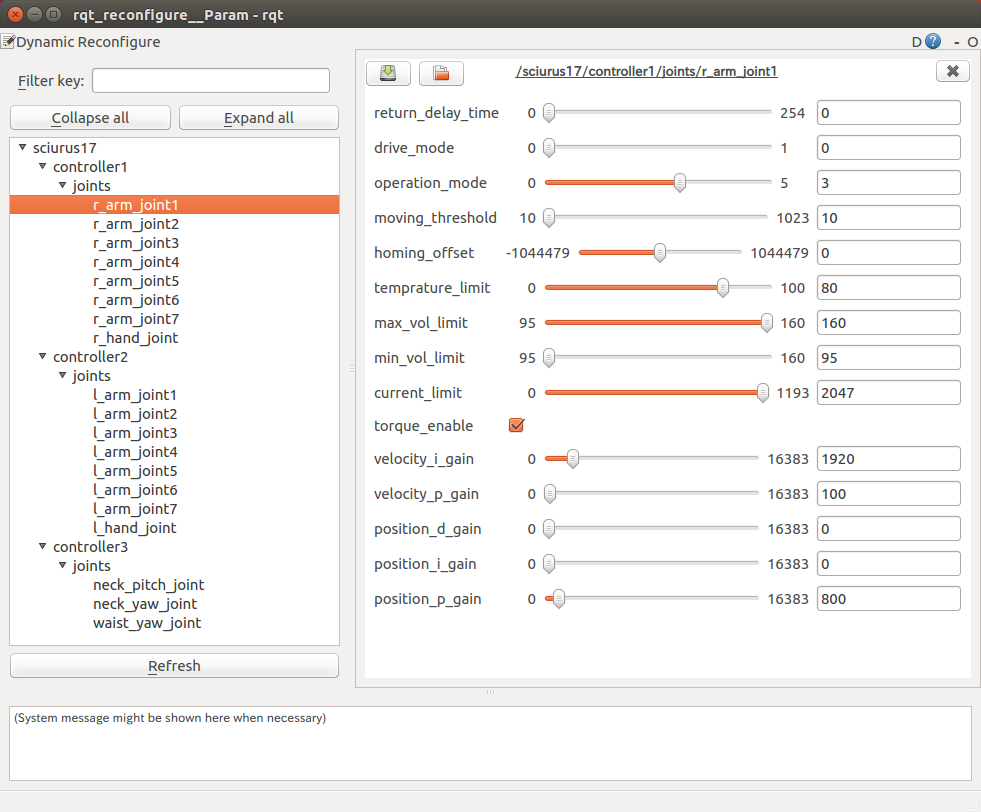
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]
Messages
Services
Plugins
Recent questions tagged sciurus17_control at Robotics Stack Exchange
|
|
sciurus17_control package from sciurus17 reposciurus17 sciurus17_bringup sciurus17_control sciurus17_examples sciurus17_gazebo sciurus17_moveit_config sciurus17_msgs sciurus17_tools sciurus17_vision |
ROS Distro
|
Package Summary
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/sciurus17_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- RT Corporation
Authors
- Hiroyuki Nomura
sciurus17_control
| English | 日本語 |
The control package for Sciurus17.
Communication port settings
sciurus17_control communicates with the SciurusSpine board built into Sciurus17 via USB for motor control.
SciurusSpine is recognized as /dev/sciurus17spine when connected to Linux after execution of create_udev_rules in the setup procedure.
If you want to use a device name other than /dev/sciurus17spine for connection to Sciurus17,
you need to change the parameters defined in each yaml file in sciurus17_control/config.
dynamixel_port:
port_name: "/dev/sciurus17spine"
Each file contains the following definitions.
-
sciurus17_control/config/sciurus17_control1.yamldefines parameters for right arm control. -
sciurus17_control/config/sciurus17_control2.yamldefines parameters for left arm control. -
sciurus17_control/config/sciurus17_control3.yamldefines parameters for torso (waist and neck) control.
Namespaces and topics
sciurus17_control defines parameters and topics in a namespace whose root is /sciurus17.
The node publishes the following topics for each joint.
- current: current value [mA].
- dxl_position: current angle [360/4096 degrees].
- temp: temperature [degree].
Dynamic reconfigure
sciurus17_control can change the servo parameters of each Joint with dynamic_reconfigure.
Start rqt_reconfigure with the following command.
rosrun rqt_reconfigure rqt_reconfigure
Please refer to the official ROBOTIS XM430 and XM540 servo manuals for details on each parameter.
Control mode settings
Sciurus17 supports position control mode and current control mode. The default setting is position control mode, and it can be switched to current control mode by changing the settings in several places.
The following is the procedure to change the setting of the right hand from position control mode to current control mode.
1.Change the servo setting.
Change Operating Mode (Address: 11) of the servo motor from 3: Position Control Mode to 0: Current Control Mode
2.Change the setting of sciurus17_control.
Change the hand part of sciurus17_control/config/sciurus17_control1.yaml as follows
```diff right_hand_controller:
- type: “position_controllers/GripperActionController”
- type: “effort_controllers/GripperActionController” publish_rate: 500 joint: r_hand_joint
- gains:
- r_hand_joint: { p: 1.0, i: 0.01, d: 0.1 } action_monitor_rate: 10 state_publish_rate: 100 stalled_velocity_threshold: 0.001 goal_tolerance: 0.05 stall_timeout: 0.1
dynamixel_port: port_name: “/dev/sciurus17spine” baud_rate: 3000000 joints: - r_arm_joint1 - r_arm_joint2 - r_arm_joint3 - r_arm_joint4 - r_arm_joint5 - r_arm_joint6 - r_arm_joint7 - r_hand_joint r_arm_joint1: {id: 2, center: 2048, home: 2048, effort_const: 2.79, mode: 3 } r_arm_joint2: {id: 3, center: 2048, home: 1024, effort_const: 2.79, mode: 3 } r_arm_joint3: {id: 4, center: 2048, home: 2048, effort_const: 1.69, mode: 3 } r_arm_joint4: {id: 5, center: 2048, home: 3825, effort_const: 1.79, mode: 3 } r_arm_joint5: {id: 6, center: 2048, home: 2048, effort_const: 1.79, mode: 3 } r_arm_joint6: {id: 7, center: 2048, home: 683, effort_const: 1.79, mode: 3 }
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| sciurus17 | |
| sciurus17_gazebo |
Launch files
- launch/controller1.launch
- launch/controller2.launch
- launch/controller3.launch
- launch/sciurus17_control.launch
- launch/sciurus17_fake_control.launch
-
- use_effort_right_arm [default: false]
- use_effort_left_wrist [default: false]