
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
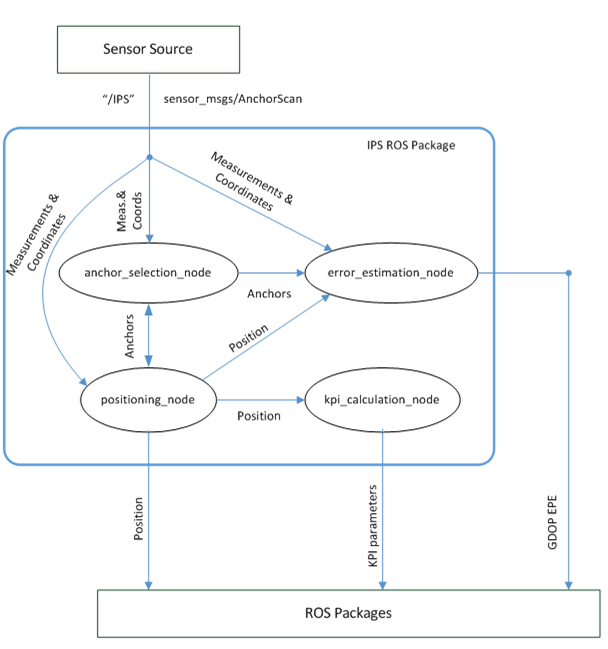
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged indoor_localization at Robotics Stack Exchange
|
|
indoor_localization package from indoor_localization repoindoor_localization |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/inomuh/indoor_localization.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-01-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Elcin Erdogan
Authors
indoor_localization
ROS Industrial Indoor Positioning System
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.
IPS ROS Package Setup
Acknowledgement
ROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com)
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Changelog for package indoor_localization
Forthcoming
1.0.0 (2019-09-03)
- the latest version of the scripts (anchor_selection_node.py, positioning_node.py, error_estimation_node.py and kpi_calculation_node.py) are loaded.
- the latest version of the msg files are loaded.
- unit test scripts are loaded.
- localization_params.yaml updated, region_params.yaml is loaded.
- .launch files are updated and new ones are added.
0.1.0 (2019-03-01)
- first public release
Package Dependencies
| Deps | Name |
|---|---|
| geometry_msgs | |
| std_msgs | |
| message_generation | |
| roscpp | |
| rospy | |
| rostest | |
| roslint | |
| uwb_hardware_driver | |
| message_runtime | |
| catkin | |
| rosunit |