
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
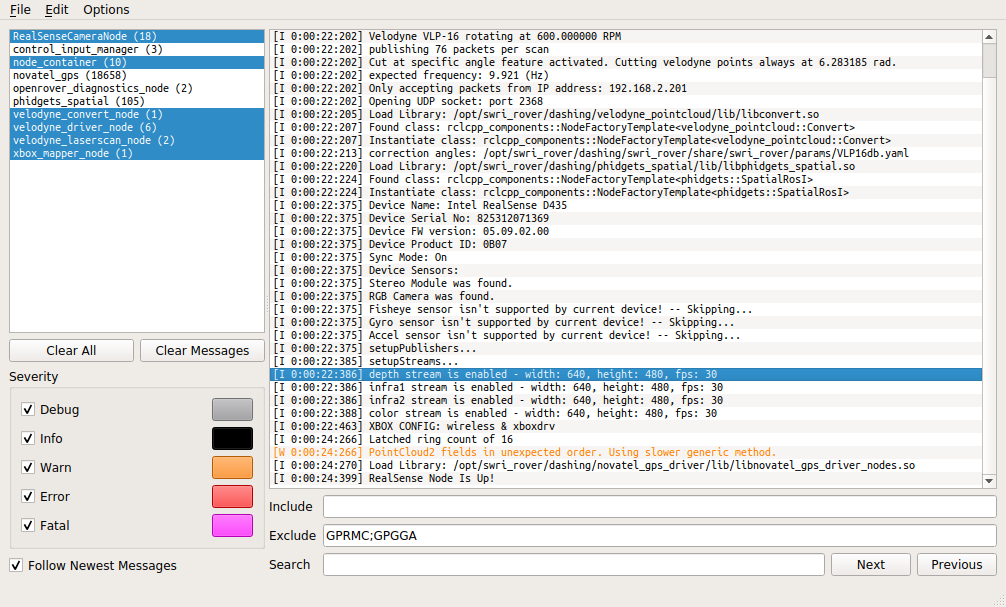
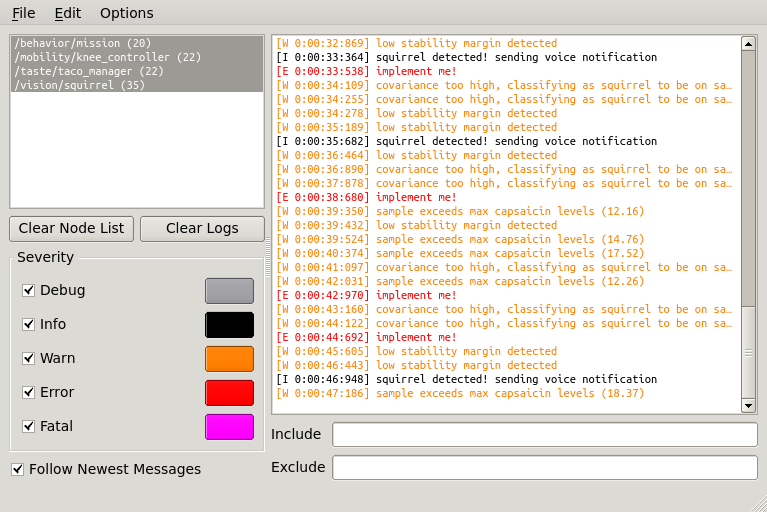
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
| master | dashing-devel |
|---|---|
 |
 |
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Changelog for package swri_console
1.1.1 (2023-04-04)
- feat: human readable time formatting (#57) Adds option to make the date and time easier to read for humans
- Added options to be displayed in each log line: logger name and function name. (#38) Co-authored-by: Rasmus Skovgaard Andersen <<Rasmus.Andersen@marel.com>>
- Switching to GitHub actions (#47)
- Merge pull request #40 from cellumation/master Enable closing via Ctrl-C from a terminal
- Merge pull request #39 from jarvisschultz/rosout_agg_bag_support Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files
- Do not use the ros signal handlers. Thus, it is now possible to close the swri_console via Ctrl-C from the console
- Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files Prefer [/rosout]{.title-ref} if it exists, if not, fall back to [/rosout_agg]{.title-ref}. Also, if no log messages are found in a bag emit a warning to indicate to user the reason why log messages did not change. Tested this with bag files containing only [/rosout]{.title-ref}, only [/rosout_agg]{.title-ref}, both [/rosout]{.title-ref} and [/rosout_agg]{.title-ref}, and neither [/rosout]{.title-ref} nor [/rosout_agg]{.title-ref}.
- Update documentation Add some feature bullet points and point out ROS 2 support
- Update package maintainers (#29)
- Contributors: Alexis Tsogias, David Anthony, Jarvis Schultz, Mart Moerdijk, Matthew, P. J. Reed
1.1.0 (2018-05-11)
- Added simple rosout_agg_recorder (#15)
- Change logger levels from within swri_console (#20)
- Load ROS logs and directories of ROS logs
- Fix compiler warnings found with Clang
- Add search bar
- Contributors: Edward Venator, P. J. Reed, Phil Westhart, Victor Murray, elliotjo, jgassaway
1.0.0 (2017-04-01)
- Add kinetic and lunar and simplify CI
- Remove cruft from CI configuration
- Add ROS kinetic to CI configuration
- Add ROS lunar to CI configuration
- Remove shadow-fixed builds from CI configuration. Since this repository has very few catkin dependencies, there's no reason to build for both shadow-fixed and released.
- Fix compiler warnings
- Contributors: Edward Venator, P. J. Reed, elliotjo
0.2.0 (2016-10-23)
- Port to Qt5 #16
- Contributors: Edward Venator, P. J. Reed
0.1.0 (2016-05-28)
- Remove settings_keys.h from qt4_wrap_cpp to suppress warning There are no QT-wrappable classes in this header, so the QT build emits a warning that it's doing nothing on the file. Since it's doing nothing, we might as well remove the file from the wrapper macro.
- Adding support for Travis CI This is based on the script provided by ros-industrial at: https://github.com/ros-industrial/industrial_ci
- Fix for issue #12; "Copy Extended" was only copying blank lines.
- Add option to alternate row colors for stronger line distinction. This uses the QAbstractItemView's alternatingRowColors property to alternate the background color of each line in the log list. You can disable the alternating colors by right clicking on the log, and your preference should be persistent between sessions.
- Fix incorrect target in CMakeLists.txt
- Select all nodes when user hits Ctrl+A in the node list. Closes #6.
- Sync behavior between saving to bags and text files. This closes #10 by using the same behavior when saving to text and bag files. Both now save the same messages that are in the user's current view. Partly because this lets the user save subsets or everything by deliberately selecting everything, and partly because it was a lot easier to change the save to bag behavior than vice versa.
- Handle log messages with multiple lines correctly. This fixes the console to handle log messages with multiple lines correctly. We're going to be using a little bit more memory now, but it shouldn't be a major issue and performance still seems great. Closes #8.
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Changelog for package swri_console
1.1.1 (2023-04-04)
- feat: human readable time formatting (#57) Adds option to make the date and time easier to read for humans
- Added options to be displayed in each log line: logger name and function name. (#38) Co-authored-by: Rasmus Skovgaard Andersen <<Rasmus.Andersen@marel.com>>
- Switching to GitHub actions (#47)
- Merge pull request #40 from cellumation/master Enable closing via Ctrl-C from a terminal
- Merge pull request #39 from jarvisschultz/rosout_agg_bag_support Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files
- Do not use the ros signal handlers. Thus, it is now possible to close the swri_console via Ctrl-C from the console
- Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files Prefer [/rosout]{.title-ref} if it exists, if not, fall back to [/rosout_agg]{.title-ref}. Also, if no log messages are found in a bag emit a warning to indicate to user the reason why log messages did not change. Tested this with bag files containing only [/rosout]{.title-ref}, only [/rosout_agg]{.title-ref}, both [/rosout]{.title-ref} and [/rosout_agg]{.title-ref}, and neither [/rosout]{.title-ref} nor [/rosout_agg]{.title-ref}.
- Update documentation Add some feature bullet points and point out ROS 2 support
- Update package maintainers (#29)
- Contributors: Alexis Tsogias, David Anthony, Jarvis Schultz, Mart Moerdijk, Matthew, P. J. Reed
1.1.0 (2018-05-11)
- Added simple rosout_agg_recorder (#15)
- Change logger levels from within swri_console (#20)
- Load ROS logs and directories of ROS logs
- Fix compiler warnings found with Clang
- Add search bar
- Contributors: Edward Venator, P. J. Reed, Phil Westhart, Victor Murray, elliotjo, jgassaway
1.0.0 (2017-04-01)
- Add kinetic and lunar and simplify CI
- Remove cruft from CI configuration
- Add ROS kinetic to CI configuration
- Add ROS lunar to CI configuration
- Remove shadow-fixed builds from CI configuration. Since this repository has very few catkin dependencies, there's no reason to build for both shadow-fixed and released.
- Fix compiler warnings
- Contributors: Edward Venator, P. J. Reed, elliotjo
0.2.0 (2016-10-23)
- Port to Qt5 #16
- Contributors: Edward Venator, P. J. Reed
0.1.0 (2016-05-28)
- Remove settings_keys.h from qt4_wrap_cpp to suppress warning There are no QT-wrappable classes in this header, so the QT build emits a warning that it's doing nothing on the file. Since it's doing nothing, we might as well remove the file from the wrapper macro.
- Adding support for Travis CI This is based on the script provided by ros-industrial at: https://github.com/ros-industrial/industrial_ci
- Fix for issue #12; "Copy Extended" was only copying blank lines.
- Add option to alternate row colors for stronger line distinction. This uses the QAbstractItemView's alternatingRowColors property to alternate the background color of each line in the log list. You can disable the alternating colors by right clicking on the log, and your preference should be persistent between sessions.
- Fix incorrect target in CMakeLists.txt
- Select all nodes when user hits Ctrl+A in the node list. Closes #6.
- Sync behavior between saving to bags and text files. This closes #10 by using the same behavior when saving to text and bag files. Both now save the same messages that are in the user's current view. Partly because this lets the user save subsets or everything by deliberately selecting everything, and partly because it was a lot easier to change the save to bag behavior than vice versa.
- Handle log messages with multiple lines correctly. This fixes the console to handle log messages with multiple lines correctly. We're going to be using a little bit more memory now, but it shouldn't be a major issue and performance still seems great. Closes #8.
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Changelog for package swri_console
1.1.1 (2023-04-04)
- feat: human readable time formatting (#57) Adds option to make the date and time easier to read for humans
- Added options to be displayed in each log line: logger name and function name. (#38) Co-authored-by: Rasmus Skovgaard Andersen <<Rasmus.Andersen@marel.com>>
- Switching to GitHub actions (#47)
- Merge pull request #40 from cellumation/master Enable closing via Ctrl-C from a terminal
- Merge pull request #39 from jarvisschultz/rosout_agg_bag_support Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files
- Do not use the ros signal handlers. Thus, it is now possible to close the swri_console via Ctrl-C from the console
- Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files Prefer [/rosout]{.title-ref} if it exists, if not, fall back to [/rosout_agg]{.title-ref}. Also, if no log messages are found in a bag emit a warning to indicate to user the reason why log messages did not change. Tested this with bag files containing only [/rosout]{.title-ref}, only [/rosout_agg]{.title-ref}, both [/rosout]{.title-ref} and [/rosout_agg]{.title-ref}, and neither [/rosout]{.title-ref} nor [/rosout_agg]{.title-ref}.
- Update documentation Add some feature bullet points and point out ROS 2 support
- Update package maintainers (#29)
- Contributors: Alexis Tsogias, David Anthony, Jarvis Schultz, Mart Moerdijk, Matthew, P. J. Reed
1.1.0 (2018-05-11)
- Added simple rosout_agg_recorder (#15)
- Change logger levels from within swri_console (#20)
- Load ROS logs and directories of ROS logs
- Fix compiler warnings found with Clang
- Add search bar
- Contributors: Edward Venator, P. J. Reed, Phil Westhart, Victor Murray, elliotjo, jgassaway
1.0.0 (2017-04-01)
- Add kinetic and lunar and simplify CI
- Remove cruft from CI configuration
- Add ROS kinetic to CI configuration
- Add ROS lunar to CI configuration
- Remove shadow-fixed builds from CI configuration. Since this repository has very few catkin dependencies, there's no reason to build for both shadow-fixed and released.
- Fix compiler warnings
- Contributors: Edward Venator, P. J. Reed, elliotjo
0.2.0 (2016-10-23)
- Port to Qt5 #16
- Contributors: Edward Venator, P. J. Reed
0.1.0 (2016-05-28)
- Remove settings_keys.h from qt4_wrap_cpp to suppress warning There are no QT-wrappable classes in this header, so the QT build emits a warning that it's doing nothing on the file. Since it's doing nothing, we might as well remove the file from the wrapper macro.
- Adding support for Travis CI This is based on the script provided by ros-industrial at: https://github.com/ros-industrial/industrial_ci
- Fix for issue #12; "Copy Extended" was only copying blank lines.
- Add option to alternate row colors for stronger line distinction. This uses the QAbstractItemView's alternatingRowColors property to alternate the background color of each line in the log list. You can disable the alternating colors by right clicking on the log, and your preference should be persistent between sessions.
- Fix incorrect target in CMakeLists.txt
- Select all nodes when user hits Ctrl+A in the node list. Closes #6.
- Sync behavior between saving to bags and text files. This closes #10 by using the same behavior when saving to text and bag files. Both now save the same messages that are in the user's current view. Partly because this lets the user save subsets or everything by deliberately selecting everything, and partly because it was a lot easier to change the save to bag behavior than vice versa.
- Handle log messages with multiple lines correctly. This fixes the console to handle log messages with multiple lines correctly. We're going to be using a little bit more memory now, but it shouldn't be a major issue and performance still seems great. Closes #8.
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 2.1.3 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
Changelog for package swri_console
2.1.3 (2026-05-06)
- Improve bag reading
(#76)
- Opening bag from parent directory so that metadata can be found. Added .db3 as option so both mcap and sqlite3 supported.
- Added some extra safe-guards around reading bags w/ no metadata
- Update README.md
- Harmonizing Builds Across ROS Distros
- Contributors: David Anthony, Robert Brothers
2.1.2 (2026-02-09)
- Include <limits> for std::numeric_limits
(#75)
- Include <limits> for std::numeric_limits
- Contributors: Tim Clephas
2.1.1 (2026-01-06)
- Using best available QoS if function is available
(#73)
- Using best available QoS if function is available
- Updating logic for selecting QoS
- Contributors: David Anthony
2.1.0 (2025-06-12)
- Update README.md
- Updating for new build commands and constants in Kilted and later (#71)
- Updating CI and readme to remove references to Iron
- Update industrial_ci.yml Updating to use ROS-I CI with support for new versions of Python.
- Contributors: David Anthony
2.0.6 (2024-09-27)
- Fix: "Human readable time" now shows milliseconds correctly. (#67) Co-authored-by: David Anthony <<djanthony@gmail.com>>
- Update industrial_ci.yml Adds CI for Jazzy and Rolling.
- Allow default support for mcap files (#65)
- Add: Added support for log files of the format "Example: 1724314618.146484723 [INFO] [namespace.Node::Fuction]: The actual log msg". (#66) Refactor: Removed nested if's
- Update README.md
- Contributors: David Anthony, Rasmus Skovgaard Andersen, Tim Clephas
2.0.5 (2024-06-20)
- Implement reading from rosbag2 files (#64)
- Add human readable time (#63)
- Remove Old Distro Support (#62)
- Update package.xml
- Adding ROS-Industrial CI Actions for ROS2 Releases
- Contributors: David Anthony, Matthijs van der Burgh, Ramon Wijnands
2.0.4 (2023-04-04)
- Adding missing dependency needed by build farm (#58)
- Contributors: David Anthony
2.0.3 (2023-02-23)
-
Fix QoS on Humble (#55)
* Use Humble's Default rosout QoS Settings Co-authored-by: David Anthony <<david.anthony@swri.org>> Co-authored-by: Tony Najjar <<tony.najjar.1997@gmail.com>>
-
Contributors: David Anthony, Tony Najjar
2.0.2 (2022-11-03)
- Update Qt Flags
(#52)
- Update to use new flags
- Contributors: David Anthony
2.0.1 (2022-11-03)
- Switching to system default QoS (#50)
- Merge pull request #45 from rasmusan/bugfix/log_queue_not_emptied Fix: Before maximum 1 log entry every 50 ms was processed. Now all en…
- Merge pull request #44 from
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| rosidl_default_generators | |
| rosbag2_storage_mcap | |
| rosidl_default_runtime | |
| rclcpp | |
| rcl_interfaces | |
| rmw | |
| rosbag2_transport |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Changelog for package swri_console
1.1.1 (2023-04-04)
- feat: human readable time formatting (#57) Adds option to make the date and time easier to read for humans
- Added options to be displayed in each log line: logger name and function name. (#38) Co-authored-by: Rasmus Skovgaard Andersen <<Rasmus.Andersen@marel.com>>
- Switching to GitHub actions (#47)
- Merge pull request #40 from cellumation/master Enable closing via Ctrl-C from a terminal
- Merge pull request #39 from jarvisschultz/rosout_agg_bag_support Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files
- Do not use the ros signal handlers. Thus, it is now possible to close the swri_console via Ctrl-C from the console
- Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files Prefer [/rosout]{.title-ref} if it exists, if not, fall back to [/rosout_agg]{.title-ref}. Also, if no log messages are found in a bag emit a warning to indicate to user the reason why log messages did not change. Tested this with bag files containing only [/rosout]{.title-ref}, only [/rosout_agg]{.title-ref}, both [/rosout]{.title-ref} and [/rosout_agg]{.title-ref}, and neither [/rosout]{.title-ref} nor [/rosout_agg]{.title-ref}.
- Update documentation Add some feature bullet points and point out ROS 2 support
- Update package maintainers (#29)
- Contributors: Alexis Tsogias, David Anthony, Jarvis Schultz, Mart Moerdijk, Matthew, P. J. Reed
1.1.0 (2018-05-11)
- Added simple rosout_agg_recorder (#15)
- Change logger levels from within swri_console (#20)
- Load ROS logs and directories of ROS logs
- Fix compiler warnings found with Clang
- Add search bar
- Contributors: Edward Venator, P. J. Reed, Phil Westhart, Victor Murray, elliotjo, jgassaway
1.0.0 (2017-04-01)
- Add kinetic and lunar and simplify CI
- Remove cruft from CI configuration
- Add ROS kinetic to CI configuration
- Add ROS lunar to CI configuration
- Remove shadow-fixed builds from CI configuration. Since this repository has very few catkin dependencies, there's no reason to build for both shadow-fixed and released.
- Fix compiler warnings
- Contributors: Edward Venator, P. J. Reed, elliotjo
0.2.0 (2016-10-23)
- Port to Qt5 #16
- Contributors: Edward Venator, P. J. Reed
0.1.0 (2016-05-28)
- Remove settings_keys.h from qt4_wrap_cpp to suppress warning There are no QT-wrappable classes in this header, so the QT build emits a warning that it's doing nothing on the file. Since it's doing nothing, we might as well remove the file from the wrapper macro.
- Adding support for Travis CI This is based on the script provided by ros-industrial at: https://github.com/ros-industrial/industrial_ci
- Fix for issue #12; "Copy Extended" was only copying blank lines.
- Add option to alternate row colors for stronger line distinction. This uses the QAbstractItemView's alternatingRowColors property to alternate the background color of each line in the log list. You can disable the alternating colors by right clicking on the log, and your preference should be persistent between sessions.
- Fix incorrect target in CMakeLists.txt
- Select all nodes when user hits Ctrl+A in the node list. Closes #6.
- Sync behavior between saving to bags and text files. This closes #10 by using the same behavior when saving to text and bag files. Both now save the same messages that are in the user's current view. Partly because this lets the user save subsets or everything by deliberately selecting everything, and partly because it was a lot easier to change the save to bag behavior than vice versa.
- Handle log messages with multiple lines correctly. This fixes the console to handle log messages with multiple lines correctly. We're going to be using a little bit more memory now, but it shouldn't be a major issue and performance still seems great. Closes #8.
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Changelog for package swri_console
1.1.1 (2023-04-04)
- feat: human readable time formatting (#57) Adds option to make the date and time easier to read for humans
- Added options to be displayed in each log line: logger name and function name. (#38) Co-authored-by: Rasmus Skovgaard Andersen <<Rasmus.Andersen@marel.com>>
- Switching to GitHub actions (#47)
- Merge pull request #40 from cellumation/master Enable closing via Ctrl-C from a terminal
- Merge pull request #39 from jarvisschultz/rosout_agg_bag_support Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files
- Do not use the ros signal handlers. Thus, it is now possible to close the swri_console via Ctrl-C from the console
- Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files Prefer [/rosout]{.title-ref} if it exists, if not, fall back to [/rosout_agg]{.title-ref}. Also, if no log messages are found in a bag emit a warning to indicate to user the reason why log messages did not change. Tested this with bag files containing only [/rosout]{.title-ref}, only [/rosout_agg]{.title-ref}, both [/rosout]{.title-ref} and [/rosout_agg]{.title-ref}, and neither [/rosout]{.title-ref} nor [/rosout_agg]{.title-ref}.
- Update documentation Add some feature bullet points and point out ROS 2 support
- Update package maintainers (#29)
- Contributors: Alexis Tsogias, David Anthony, Jarvis Schultz, Mart Moerdijk, Matthew, P. J. Reed
1.1.0 (2018-05-11)
- Added simple rosout_agg_recorder (#15)
- Change logger levels from within swri_console (#20)
- Load ROS logs and directories of ROS logs
- Fix compiler warnings found with Clang
- Add search bar
- Contributors: Edward Venator, P. J. Reed, Phil Westhart, Victor Murray, elliotjo, jgassaway
1.0.0 (2017-04-01)
- Add kinetic and lunar and simplify CI
- Remove cruft from CI configuration
- Add ROS kinetic to CI configuration
- Add ROS lunar to CI configuration
- Remove shadow-fixed builds from CI configuration. Since this repository has very few catkin dependencies, there's no reason to build for both shadow-fixed and released.
- Fix compiler warnings
- Contributors: Edward Venator, P. J. Reed, elliotjo
0.2.0 (2016-10-23)
- Port to Qt5 #16
- Contributors: Edward Venator, P. J. Reed
0.1.0 (2016-05-28)
- Remove settings_keys.h from qt4_wrap_cpp to suppress warning There are no QT-wrappable classes in this header, so the QT build emits a warning that it's doing nothing on the file. Since it's doing nothing, we might as well remove the file from the wrapper macro.
- Adding support for Travis CI This is based on the script provided by ros-industrial at: https://github.com/ros-industrial/industrial_ci
- Fix for issue #12; "Copy Extended" was only copying blank lines.
- Add option to alternate row colors for stronger line distinction. This uses the QAbstractItemView's alternatingRowColors property to alternate the background color of each line in the log list. You can disable the alternating colors by right clicking on the log, and your preference should be persistent between sessions.
- Fix incorrect target in CMakeLists.txt
- Select all nodes when user hits Ctrl+A in the node list. Closes #6.
- Sync behavior between saving to bags and text files. This closes #10 by using the same behavior when saving to text and bag files. Both now save the same messages that are in the user's current view. Partly because this lets the user save subsets or everything by deliberately selecting everything, and partly because it was a lot easier to change the save to bag behavior than vice versa.
- Handle log messages with multiple lines correctly. This fixes the console to handle log messages with multiple lines correctly. We're going to be using a little bit more memory now, but it shouldn't be a major issue and performance still seems great. Closes #8.
File truncated at 100 lines see the full file
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged swri_console at Robotics Stack Exchange
|
|
swri_console package from swri_console reposwri_console |
ROS Distro
|
Package Summary
| Version | 1.1.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Southwest Research Institute
Authors
- P. J. Reed
- Jerry Towler
- David Anthony
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Changelog for package swri_console
1.1.1 (2023-04-04)
- feat: human readable time formatting (#57) Adds option to make the date and time easier to read for humans
- Added options to be displayed in each log line: logger name and function name. (#38) Co-authored-by: Rasmus Skovgaard Andersen <<Rasmus.Andersen@marel.com>>
- Switching to GitHub actions (#47)
- Merge pull request #40 from cellumation/master Enable closing via Ctrl-C from a terminal
- Merge pull request #39 from jarvisschultz/rosout_agg_bag_support Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files
- Do not use the ros signal handlers. Thus, it is now possible to close the swri_console via Ctrl-C from the console
- Add ability to read either [/rosout]{.title-ref} or [/rosout_agg]{.title-ref} from bag files Prefer [/rosout]{.title-ref} if it exists, if not, fall back to [/rosout_agg]{.title-ref}. Also, if no log messages are found in a bag emit a warning to indicate to user the reason why log messages did not change. Tested this with bag files containing only [/rosout]{.title-ref}, only [/rosout_agg]{.title-ref}, both [/rosout]{.title-ref} and [/rosout_agg]{.title-ref}, and neither [/rosout]{.title-ref} nor [/rosout_agg]{.title-ref}.
- Update documentation Add some feature bullet points and point out ROS 2 support
- Update package maintainers (#29)
- Contributors: Alexis Tsogias, David Anthony, Jarvis Schultz, Mart Moerdijk, Matthew, P. J. Reed
1.1.0 (2018-05-11)
- Added simple rosout_agg_recorder (#15)
- Change logger levels from within swri_console (#20)
- Load ROS logs and directories of ROS logs
- Fix compiler warnings found with Clang
- Add search bar
- Contributors: Edward Venator, P. J. Reed, Phil Westhart, Victor Murray, elliotjo, jgassaway
1.0.0 (2017-04-01)
- Add kinetic and lunar and simplify CI
- Remove cruft from CI configuration
- Add ROS kinetic to CI configuration
- Add ROS lunar to CI configuration
- Remove shadow-fixed builds from CI configuration. Since this repository has very few catkin dependencies, there's no reason to build for both shadow-fixed and released.
- Fix compiler warnings
- Contributors: Edward Venator, P. J. Reed, elliotjo
0.2.0 (2016-10-23)
- Port to Qt5 #16
- Contributors: Edward Venator, P. J. Reed
0.1.0 (2016-05-28)
- Remove settings_keys.h from qt4_wrap_cpp to suppress warning There are no QT-wrappable classes in this header, so the QT build emits a warning that it's doing nothing on the file. Since it's doing nothing, we might as well remove the file from the wrapper macro.
- Adding support for Travis CI This is based on the script provided by ros-industrial at: https://github.com/ros-industrial/industrial_ci
- Fix for issue #12; "Copy Extended" was only copying blank lines.
- Add option to alternate row colors for stronger line distinction. This uses the QAbstractItemView's alternatingRowColors property to alternate the background color of each line in the log list. You can disable the alternating colors by right clicking on the log, and your preference should be persistent between sessions.
- Fix incorrect target in CMakeLists.txt
- Select all nodes when user hits Ctrl+A in the node list. Closes #6.
- Sync behavior between saving to bags and text files. This closes #10 by using the same behavior when saving to text and bag files. Both now save the same messages that are in the user's current view. Partly because this lets the user save subsets or everything by deliberately selecting everything, and partly because it was a lot easier to change the save to bag behavior than vice versa.
- Handle log messages with multiple lines correctly. This fixes the console to handle log messages with multiple lines correctly. We're going to be using a little bit more memory now, but it shouldn't be a major issue and performance still seems great. Closes #8.
File truncated at 100 lines see the full file