
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
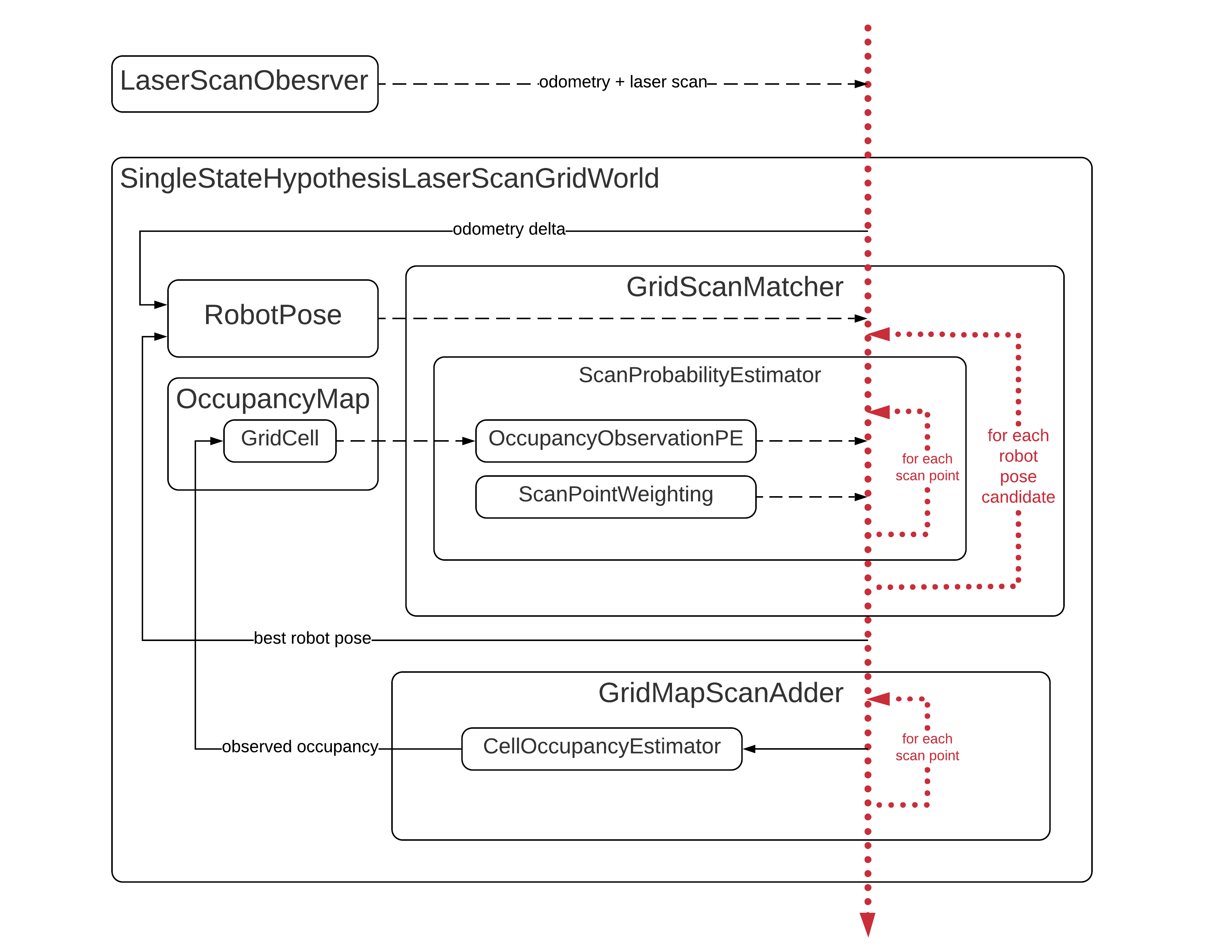
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]
Messages
Services
Plugins
Recent questions tagged slam_constructor at Robotics Stack Exchange
|
|
slam_constructor package from slam_constructor reposlam_constructor |
ROS Distro
|
Package Summary
| Version | 0.9.3 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/OSLL/slam-constructor.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2018-05-29 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- OSLL
Authors
- JetBrains Research, OSLL team
SLAM Constructor Framework
The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported). It also includes implementation of several SLAM algorithms: tinySLAM, vinySLAM and GMapping. They show an example of the framework usage and can be used as a base of a new SLAM algorithm.
Hardware Requirements
Current implementation requires odometry data and laser scans to be provided by the ROS topics (see Subscribed topics). It also supposes that a laser scanner is fixed in (0, 0) of a robot and mounted horizontally.
Examples
Provided algorithms usage
Each algorithm is supplied with launch-files for the MIT Stata Center and PR2 – Willow Garage datasets that give the idea of how to launch algorithms. The _mit_ launch-files can be used in general case if data provided by a dataset do not require any preprocessing. For example, tinySLAM can be launched in the following way:
roslaunch slam_constructor tiny_mit_run.launch path:=[path to dataset]
In order to run an algorithm on data received in real time you can remove a dataset player node from a launch file, but make sure that sensor data are provided through subscribed topics.
Single-hypothesis SLAM workflow
The following diagram shows the expected workflow of the general single-hypothesis SLAM algorithm:
Parameters
The following parameters are common for all provided SLAM algorithms:
ROS-specific parameters
-
~in/lscan2D/ros/topic/name(string, default:/base_scan) – the laser scan topic name -
~in/odometry/ros/tf/odom_frame_id(string, default:odom_combined) – the odometry tf frame id -
~ros/tf/map_frame_id(string, default:map) – the map tf frame id -
~ros/tf/robot_pose_frame_id(string, default:robot_pose) – the output robot pose frame id -
~ros/tf/async_correction(bool, default:false) – set totrueto publish themap→odomtransformation asynchronous (in a different thread) - tf listener parameters (refer to
tf::MessageFilterdocumentation):-
~ros/subscribers_queue_size(int, default:1000) – the queue size formessage_filters::Subscriber -
~ros/tf/buffer_duration(double, default:5.0) – the buffer size in seconds fortf::TranformListner -
~ros/filter_queue_size(int, default:1000) – the filter queue size
-
-
~ros/rviz/map_publishing_rate(double, default:5.0) – the map publishing interval in seconds -
~ros/skip_exceeding_lsr_vals(bool, default:false) – set totrueto skip laser scan outliers or tofalseto insert such measurements in a map as a free space
General SLAM parameters
-
~slam/map/height_in_meters(double, default:10.0) – the map height in meters -
~slam/map/width_in_meters(double, default:10.0) – the map width in meters -
~slam/map/meters_per_cell(double, default:0.1) – the map resolution in meters -
~slam/performance/use_trig_cache(bool, default:false) – use trigonometry cache to speed up scan point operations - cell occupancy estimator parameters:
-
~slam/occupancy_estimator/type(string, default:const) – the type of the cell occupancy estimator:-
const– a cell is considered occupied if a laser scan point is inside the cell -
area– a cell occupancy estimation is based on how a laser beam splits the cell
-
-
~slam/occupancy_estimator/base_occupied/prob(double, default:0.95) – the cell’s probability to be occupied if a scan point is inside the cell -
~slam/occupancy_estimator/base_occupied/qual(double, default:1.0) -
~slam/occupancy_estimator/base_empty/prob(double, default:0.01) – the cell’s probability to be empty if a laser beam passes through the cell -
~slam/occupancy_estimator/base_empty/qual(double, default:1.0)
-
-
~slam/mapping/blur(double, default:0.0) – blur obstacles along the direction of a laser beam in the specified range (in meters) -
~slam/mapping/max_range(double, default:<infinity>) – maximum valid range for laser scan measurements when updating a map with a new laser scan
Scan-matcher parameters
-
~slam/scmtch/type(string, default:<undefined>) – the scan matcher (SM) to be used. Currently the following scan matchers are supported:-
MC– Monte-Carlo scan matcher. Parameters:-
~slam/scmtch/MC/attempts_limit(unsigned int, default:100) – the maximum number of SM iterations -
~slam/scmtch/MC/seed(int, default:<random>) – the seed value for RNG -
~slam/scmtch/MC/dispersion/translation(double, default:0.2) -
~slam/scmtch/MC/dispersion/rotation(double, default:0.1) -
~slam/scmtch/MC/dispersion/failed_attempts_limit(unsigned int, default:20)
-
-
HC– hill climbing scan matcher. Parameters:-
~slam/scmtch/HC/distortion/translation(double, default:0.1) – the initial step size in x/y direction in meters -
~slam/scmtch/HC/distortion/rotation(double, default:0.1) – the initial step size in th direction in radians -
~slam/scmtch/HC/distortion/failed_attempts_limit(unsigned int, default:6)
-
-
BF– brute-force scan matcher. Searches for the best scan position around the initial guess. Parameters set the search ranges and search steps for each coordinate (in meters for translation, radians for rotation):-
~slam/scmtch/BF/[x, y, t]/from(double, default:-0.5,-0.5,-5°) -
~slam/scmtch/BF/[x, y, t]/to(double, default:0.5,0.5,5°) -
~slam/scmtch/BF/[x, y, t]/step(double, default:0.1,0.1,1°)
-
-
-
~slam/scmtch/spe/type(string, default:<undefined>) – the scan probability estimator type. Currently onlywmpp(weighted mean point probability) is supported. Parameters:-
~slam/scmtch/spe/wmpp/weighting/type(string, default:<undefined>)-
even– each point in a scan has the equal weight -
viny– weighting scheme used in vinySLAM (see the paper) -
ahr– weighting scheme based on angle histograms
-
-
~slam/scmtch/spe/wmpp/sp_skip_rate(unsigned int, default:0) – skip every n-th point in scan -
~slam/scmtch/spe/wmpp/sp_max_usable_range(double, default:-1.0) – max valid scan measurement range used in scan probability estimation
-
-
~slam/scmtch/oope/type(string, default:obstacle) – the occupancy observation probability estimator type. Currently the following types are supported:obstaclemaxmeanoverlap
tinySLAM parameters
-
~slam/cell/type(string, default:base) – the cell model type. Accepted values:-
base– the cell model used in original tinySLAM -
avg– the cell model proposed in this paper
-
GMapping parameters
GMapping has the following additional parameters (note that ~slam/scmtch/oope/type shouldn’t be provided or must be custom):
-
~slam/particles/number(unsigned int, default:30)
File truncated at 100 lines see the full file
Changelog for package slam_constructor
0.9.3 (2018-05-30)
- Minor fixes
0.9.2 (2018-05-19)
- Added support for gcc 4.9
0.9.1 (2018-05-18)
- Added support for CMake 2.8
0.9.0 (2018-04-16)
- Initial release
- Contributors: Artur Huletski, Dmitriy Kartashov, Kirill Krinkin, RomanDegtyar, art32fil
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| sensor_msgs | |
| nav_msgs | |
| geometry_msgs | |
| tf | |
| message_filters | |
| rosbag_storage | |
| catkin |
System Dependencies
| Name |
|---|
| gtest |
Dependant Packages
Launch files
- launch/gmapping_mit_run.launch
-
- rate [default: 1.0]
- launch/gmapping_wg_pr2_run.launch
-
- rate [default: 1.0]
- launch/tiny_mit_run.launch
-
- rate [default: 1.0]
- launch/tiny_pr2_run.launch
-
- rate [default: 1.0]
- launch/viny_mit_run.launch
-
- rate [default: 1.0]
- launch/viny_pr2_run.launch
-
- rate [default: 1.0]