
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive 
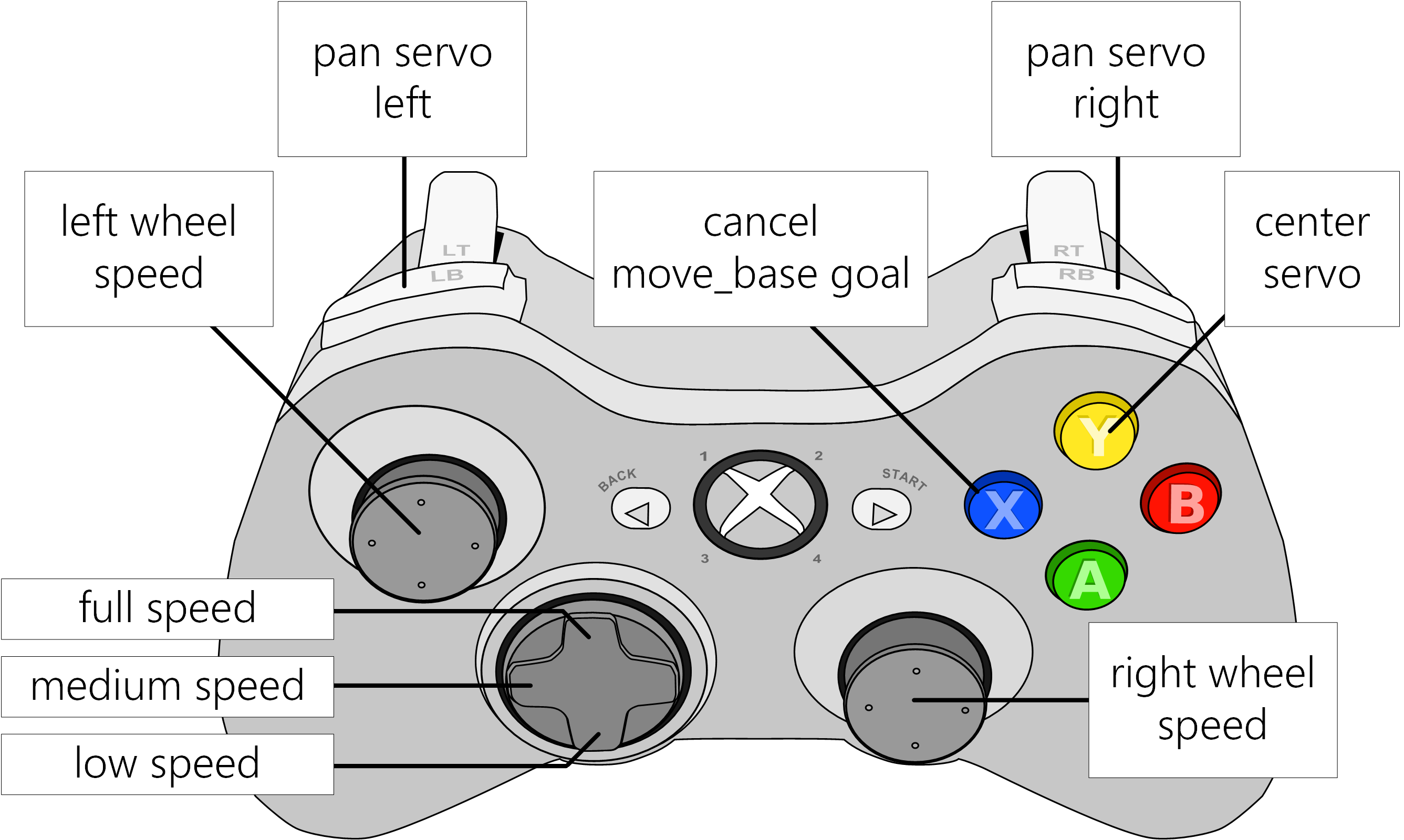
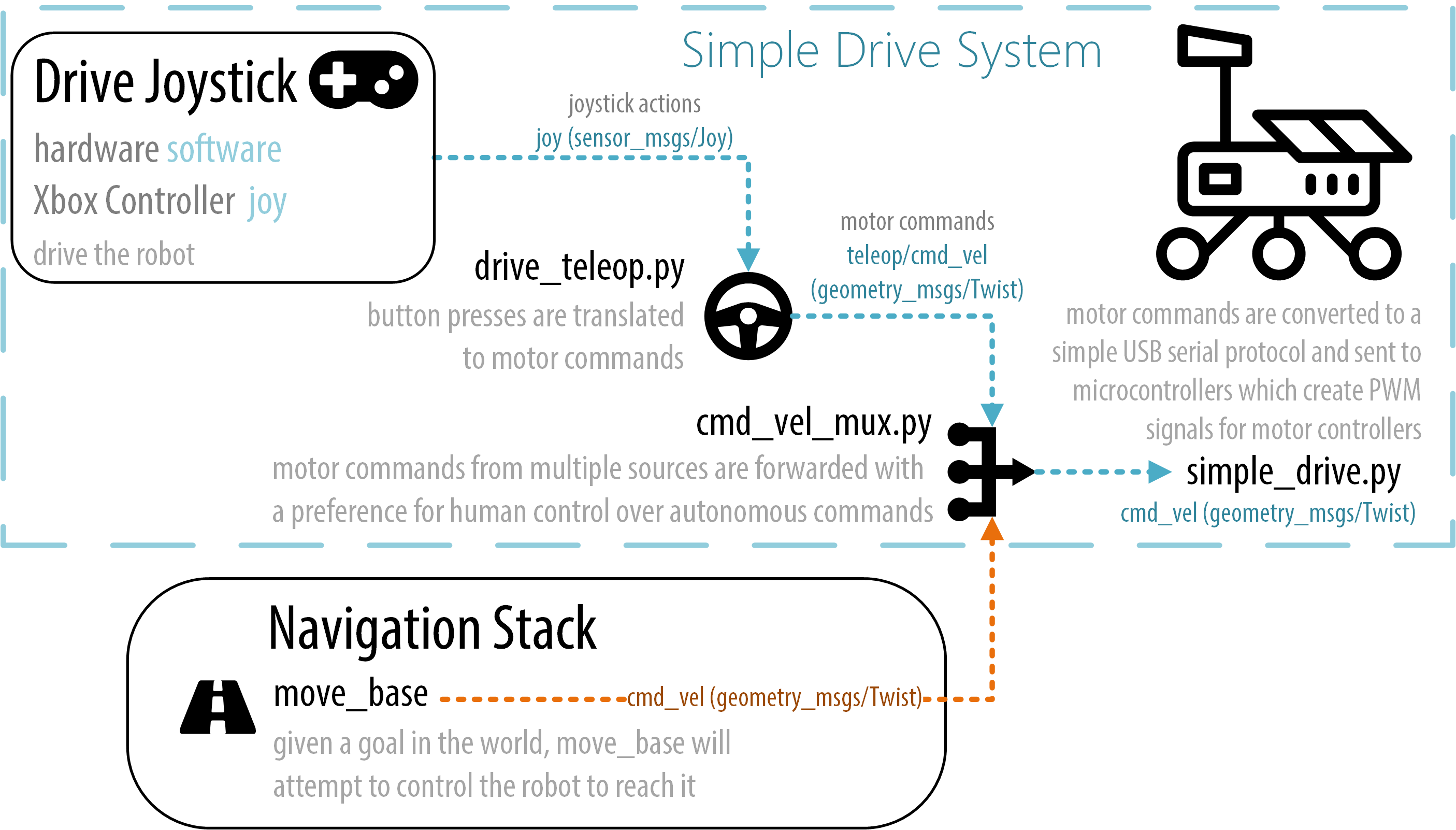
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
 ##
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]
Messages
Services
Plugins
Recent questions tagged simple_drive at Robotics Stack Exchange
|
|
simple_drive package from simple_drive reposimple_drive |
ROS Distro
|
Package Summary
| Version | 0.1.0 |
| License | Unlicense |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/danielsnider/simple_drive.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2019-05-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Snider
Authors
- Daniel Snider
- Matthew Mirvish
simple_drive
A simple robot drive system that includes skid steering joystick teleoperation, control of a panning servo to look around the robot, and Arduino firmware.
##
Quick Start
- Install:
$ sudo apt-get install ros-kinetic-simple-drive
- Launch ROS nodes:
$ roslaunch simple_drive drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch simple_drive cmd_vel_mux.launch
$ roslaunch simple_drive simple_drive.launch serial_dev:=/dev/ttyACM0
OR all-in-one launch:
$ roslaunch simple_drive drive.launch
-
Install the drive_firmware onto a microcontroller connected to motors and wheels.
-
Drive your robot around.
Full documentation on wiki: http://wiki.ros.org/simple_drive
Changelog for package simple_drive
0.1.0 (2017-07-20)
- First release
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| sensor_msgs | |
| geometry_msgs | |
| actionlib_msgs | |
| std_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/cmd_vel_mux.launch
- launch/drive.launch
- launch/drive_teleop.launch
-
- joy_dev [default: /dev/input/js0]
- launch/simple_drive.launch
-
- serial_dev [default: /dev/ttyACM0]