No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
rwt_nav package from visualization_rwt reporwt_app_chooser rwt_image_view rwt_moveit rwt_nav rwt_plot rwt_robot_monitor rwt_speech_recognition rwt_steer rwt_utils_3rdparty visualization_rwt |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.3 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tork-a/visualization_rwt.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-06-01 |
| Dev Status | UNMAINTAINED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
The rwt_nav package
Additional Links
Maintainers
- Yug Ajmera
- Shingo Kitagawa
Authors
- Yug Ajmera
- Shingo Kitagawa
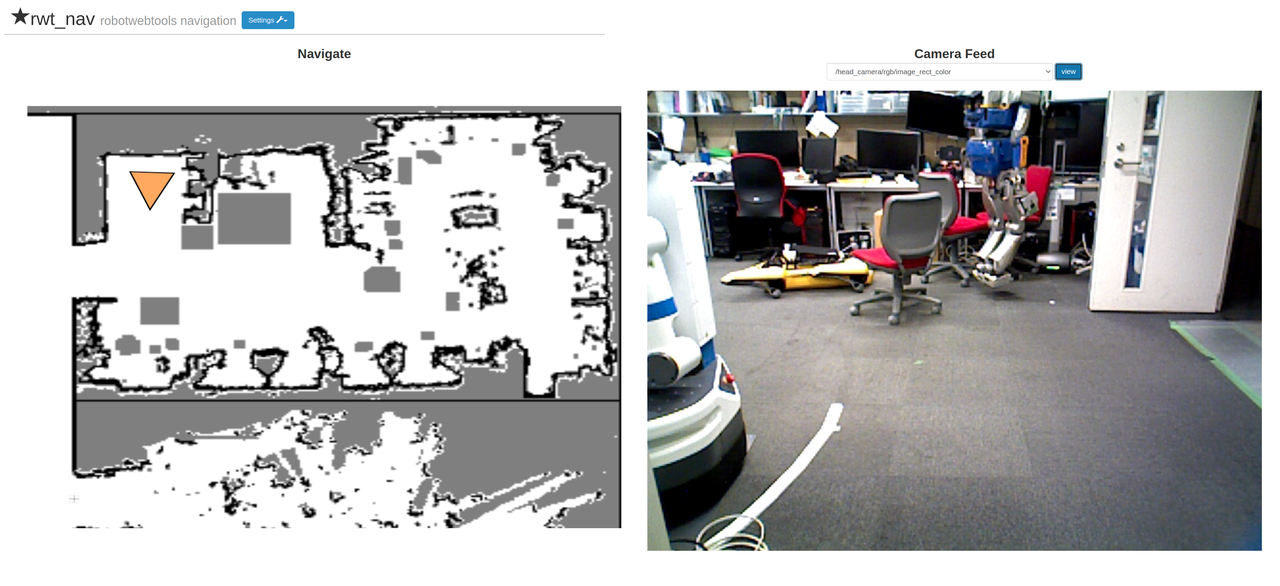
rwt_nav
Usage
roslaunch rwt_nav rwt_nav.launch
Open your browser, and access to: http://<your host name>:8000/rwt_nav/
for example : http://localhost:8000/rwt_nav/
To view live location of robot :
rosrun rwt_nav robot_pose_publisher
- Current position of the robot is shown by yellow arrow.
- Ctrl + mouse movement = Zoom
- Shift + mouse movement = Pan
Launch the amcl node and move_base node.
Click anywhere on the map to give goal position and direction.
- Goal will be marked with red arrow.
CHANGELOG
Changelog for package rwt_nav
0.1.3 (2023-06-01)
- add missing test_depends
(#131)
fixes
https://build.ros.org/job/Nbin_uF64__rwt_app_chooser__ubuntu_focal_amd64__binary/1/console
` 13:43:55 -- Using Python nosetests: /usr/bin/nosetests3 13:43:55 -- catkin 0.8.10 13:43:55 -- BUILD_SHARED_LIBS is on 13:43:55 -- Could NOT find roslaunch (missing: roslaunch_DIR) 13:43:55 -- Could not find the required component 'roslaunch'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found. 13:43:55 CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package): 13:43:55 Could not find a package configuration file provided by "roslaunch" with 13:43:55 any of the following names: 13:43:55 13:43:55 roslaunchConfig.cmake 13:43:55 roslaunch-config.cmake 13:43:55 13:43:55 Add the installation prefix of "roslaunch" to CMAKE_PREFIX_PATH or set 13:43:55 "roslaunch_DIR" to a directory containing one of the above files. If 13:43:55 "roslaunch" provides a separate development package or SDK, be sure it has 13:43:55 been installed. 13:43:55 Call Stack (most recent call first): 13:43:55 CMakeLists.txt:13 (find_package) 13:43:55 13:43:55 13:43:55 -- Configuring incomplete, errors occurred! 13:43:55 See also "/tmp/binarydeb/ros-noetic-rwt-app-chooser-0.1` - Contributors: Kei Okada
0.1.2 (2023-05-30)
- fix for noetic
(#130)
- fix test code for selenium version >= 4.3.0
- move_base/goal requires frame_id, without starting \'/\'
(#119)
- Warning: Invalid argument /map passed to canTransform argument source_frame in tf2 frame_ids cannot start with a \'/\' like: at line 134 in /tmp/binarydeb/ros-melodic-tf2-0.6.5/src/buffer_core.cpp [ WARN] [1645522151.660224428, 19134.759000000]: Failed to transform the goal pose from /map into the map frame: Invalid argument /map passed to lookupTransform argument source_frame in tf2 frame_ids cannot start with a \'/\' like: [ERROR] [1645522151.660344650, 19134.759000000]: The goal pose passed to this planner must be in the map frame. It is instead in the /map frame. Closes #118
- Contributors: Kei Okada
0.1.1 (2021-11-12)
0.1.0 (2021-11-12)
0.0.5 (2021-03-12)
0.0.4 (2021-03-09)
- add rwt_nav package (#96)
- Contributors: Kei Okada, Shingo Kitagawa, Yug Ajmera
0.0.3 (2016-10-01 15:52)
0.0.2 (2016-10-01 15:20)
Wiki Tutorials
See ROS Wiki Tutorials for more details.
Source Tutorials
Not currently indexed.
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | rosbridge_server | |
| 1 | web_video_server | |
| 1 | rwt_utils_3rdparty | |
| 1 | roswww | |
| 2 | geometry_msgs | |
| 1 | roscpp | |
| 1 | tf | |
| 1 | catkin | |
| 1 | rostest | |
| 1 | roslaunch | |
| 1 | image_publisher | |
| 1 | rviz | |
| 2 | map_server | |
| 2 | move_base_msgs |
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
- launch/rwt_nav.launch
-
- launch_roswww [default: true]
- launch_rosbridge_websocket [default: true]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged rwt_nav at Robotics Stack Exchange
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
|
|
rwt_nav package from visualization_rwt reporwt_app_chooser rwt_image_view rwt_moveit rwt_nav rwt_plot rwt_robot_monitor rwt_speech_recognition rwt_steer rwt_utils_3rdparty visualization_rwt |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.3 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tork-a/visualization_rwt.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-06-01 |
| Dev Status | UNMAINTAINED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
The rwt_nav package
Additional Links
Maintainers
- Yug Ajmera
- Shingo Kitagawa
Authors
- Yug Ajmera
- Shingo Kitagawa
rwt_nav
Usage
roslaunch rwt_nav rwt_nav.launch
Open your browser, and access to: http://<your host name>:8000/rwt_nav/
for example : http://localhost:8000/rwt_nav/
To view live location of robot :
rosrun rwt_nav robot_pose_publisher
- Current position of the robot is shown by yellow arrow.
- Ctrl + mouse movement = Zoom
- Shift + mouse movement = Pan
Launch the amcl node and move_base node.
Click anywhere on the map to give goal position and direction.
- Goal will be marked with red arrow.
CHANGELOG
Changelog for package rwt_nav
0.1.3 (2023-06-01)
- add missing test_depends
(#131)
fixes
https://build.ros.org/job/Nbin_uF64__rwt_app_chooser__ubuntu_focal_amd64__binary/1/console
` 13:43:55 -- Using Python nosetests: /usr/bin/nosetests3 13:43:55 -- catkin 0.8.10 13:43:55 -- BUILD_SHARED_LIBS is on 13:43:55 -- Could NOT find roslaunch (missing: roslaunch_DIR) 13:43:55 -- Could not find the required component 'roslaunch'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found. 13:43:55 CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package): 13:43:55 Could not find a package configuration file provided by "roslaunch" with 13:43:55 any of the following names: 13:43:55 13:43:55 roslaunchConfig.cmake 13:43:55 roslaunch-config.cmake 13:43:55 13:43:55 Add the installation prefix of "roslaunch" to CMAKE_PREFIX_PATH or set 13:43:55 "roslaunch_DIR" to a directory containing one of the above files. If 13:43:55 "roslaunch" provides a separate development package or SDK, be sure it has 13:43:55 been installed. 13:43:55 Call Stack (most recent call first): 13:43:55 CMakeLists.txt:13 (find_package) 13:43:55 13:43:55 13:43:55 -- Configuring incomplete, errors occurred! 13:43:55 See also "/tmp/binarydeb/ros-noetic-rwt-app-chooser-0.1` - Contributors: Kei Okada
0.1.2 (2023-05-30)
- fix for noetic
(#130)
- fix test code for selenium version >= 4.3.0
- move_base/goal requires frame_id, without starting \'/\'
(#119)
- Warning: Invalid argument /map passed to canTransform argument source_frame in tf2 frame_ids cannot start with a \'/\' like: at line 134 in /tmp/binarydeb/ros-melodic-tf2-0.6.5/src/buffer_core.cpp [ WARN] [1645522151.660224428, 19134.759000000]: Failed to transform the goal pose from /map into the map frame: Invalid argument /map passed to lookupTransform argument source_frame in tf2 frame_ids cannot start with a \'/\' like: [ERROR] [1645522151.660344650, 19134.759000000]: The goal pose passed to this planner must be in the map frame. It is instead in the /map frame. Closes #118
- Contributors: Kei Okada
0.1.1 (2021-11-12)
0.1.0 (2021-11-12)
0.0.5 (2021-03-12)
0.0.4 (2021-03-09)
- add rwt_nav package (#96)
- Contributors: Kei Okada, Shingo Kitagawa, Yug Ajmera
0.0.3 (2016-10-01 15:52)
0.0.2 (2016-10-01 15:20)
Wiki Tutorials
See ROS Wiki Tutorials for more details.
Source Tutorials
Not currently indexed.
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | rosbridge_server | |
| 1 | web_video_server | |
| 1 | rwt_utils_3rdparty | |
| 1 | roswww | |
| 2 | geometry_msgs | |
| 1 | roscpp | |
| 1 | tf | |
| 1 | catkin | |
| 1 | rostest | |
| 1 | roslaunch | |
| 1 | image_publisher | |
| 1 | rviz | |
| 2 | map_server | |
| 2 | move_base_msgs |
System Dependencies
No direct system dependencies.
Dependant Packages
No known dependants.
Launch files
- launch/rwt_nav.launch
-
- launch_roswww [default: true]
- launch_rosbridge_websocket [default: true]
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.