
|
rqt_joint_trajectory_plot package from rqt_joint_trajectory_plot reporqt_joint_trajectory_plot |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-05-14 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Tokyo Opensource Robotics Kyokai (TORK) Developer Team
Authors
- Ryosuke Tajima
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the 'Plugins'->'Visualization'->'JointTrajectoryPlot'
If you don't have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
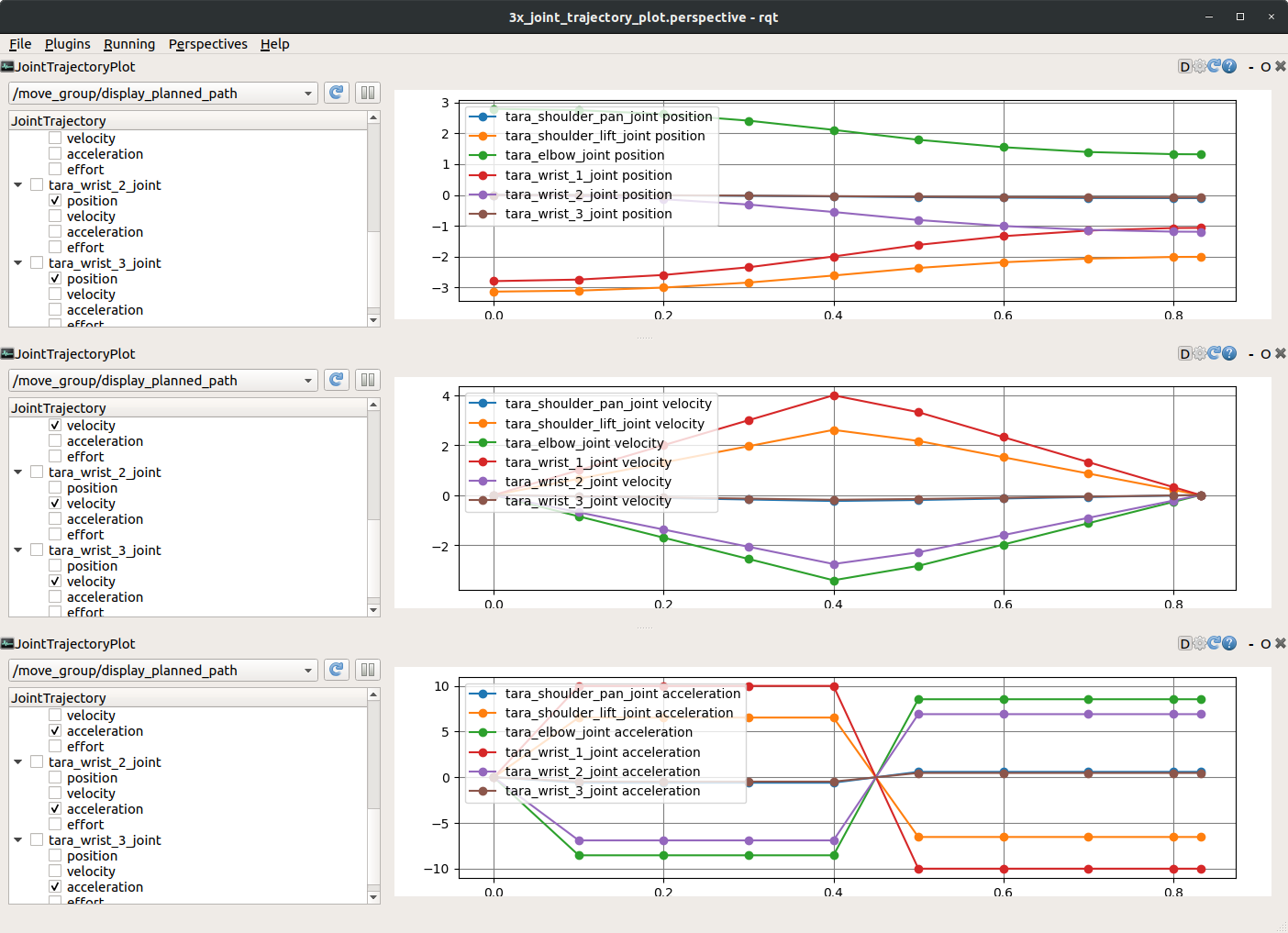
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don't see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
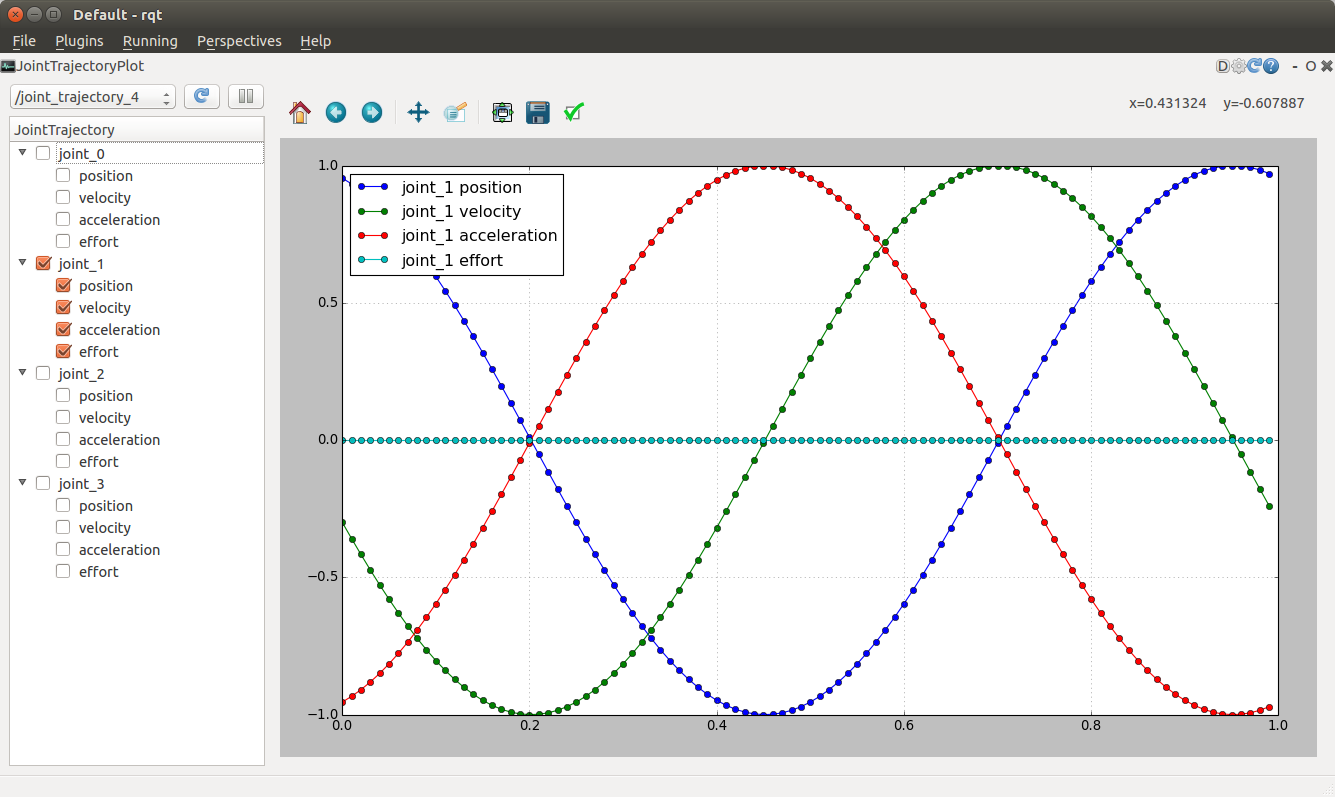
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
Changelog for package rqt_joint_trajectory_plot
0.0.5 (2020-03-07)
- Add melodic
release(#13)
- Set CI python version to 3.6
- Merge pull request
- added ability to plot planned_path from moveit and made rqt launch
file(#10)
- updated package.xml to include moveit_msgs for plotting display_trajectory messages
- fixed example PVA image size
- added empty display trajectory check and updated readme with instrucitons to launch PVA perspective
- added ability to plot planned_path from moveit and made rqt launch file with custom perspective
- Fix workspace name for CI
(#11)
- Fix workspace name as https://github.com/tork-a/jog_control/pull/37/files
- added empty display trajectory check and updated readme with instrucitons to launch PVA perspective
- added ability to plot planned_path from moveit and made rqt launch file with custom perspective
- Add travis.yml
- Contributors: Ryosuke Tajima, marqrazz
0.0.4 (2018-06-14)
- Fix lint problem
- Contributors: Ryosuke Tajima
0.0.3 (2018-06-14)
- Check the qt version in plot_widget.py for indigo release(#9)
- Contributors: Ryosuke Tajima
0.0.2 (2018-06-08)
- Add script/rqt_joint_trajectory_plot(#7)
- Update to visualize FollowJointTrajectoryActionGoal(#6)
- Contributors: Kei Okada, Ryosuke Tajima
0.0.1 (2018-01-20)
- Organize and format package files
- roslint check
- autopep8 for python scripts
- Port to PyQt5 as used in kinetic(#1)
- Port to PyQt5 no toolbar so far, apparently this is not yet(?!) available in matplotlibs Qt5Agg backend.
- add screenshot to README.md
- add a screenshot file.
- Initial commit
- Contributors: Ryosuke Tajima, Simon Schmeisser
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | rospy | |
| 1 | rqt_gui | |
| 1 | rqt_gui_py | |
| 1 | roslint | |
| 1 | roslaunch | |
| 1 | rostest | |
| 1 | catkin | |
| 1 | control_msgs | |
| 1 | rqt_py_common | |
| 2 | trajectory_msgs | |
| 1 | moveit_msgs |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged rqt_joint_trajectory_plot at Robotics Stack Exchange
|
|
rqt_joint_trajectory_plot package from rqt_joint_trajectory_plot reporqt_joint_trajectory_plot |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-05-14 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Tokyo Opensource Robotics Kyokai (TORK) Developer Team
Authors
- Ryosuke Tajima
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the 'Plugins'->'Visualization'->'JointTrajectoryPlot'
If you don't have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don't see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
Changelog for package rqt_joint_trajectory_plot
0.0.5 (2020-03-07)
- Add melodic
release(#13)
- Set CI python version to 3.6
- Merge pull request
- added ability to plot planned_path from moveit and made rqt launch
file(#10)
- updated package.xml to include moveit_msgs for plotting display_trajectory messages
- fixed example PVA image size
- added empty display trajectory check and updated readme with instrucitons to launch PVA perspective
- added ability to plot planned_path from moveit and made rqt launch file with custom perspective
- Fix workspace name for CI
(#11)
- Fix workspace name as https://github.com/tork-a/jog_control/pull/37/files
- added empty display trajectory check and updated readme with instrucitons to launch PVA perspective
- added ability to plot planned_path from moveit and made rqt launch file with custom perspective
- Add travis.yml
- Contributors: Ryosuke Tajima, marqrazz
0.0.4 (2018-06-14)
- Fix lint problem
- Contributors: Ryosuke Tajima
0.0.3 (2018-06-14)
- Check the qt version in plot_widget.py for indigo release(#9)
- Contributors: Ryosuke Tajima
0.0.2 (2018-06-08)
- Add script/rqt_joint_trajectory_plot(#7)
- Update to visualize FollowJointTrajectoryActionGoal(#6)
- Contributors: Kei Okada, Ryosuke Tajima
0.0.1 (2018-01-20)
- Organize and format package files
- roslint check
- autopep8 for python scripts
- Port to PyQt5 as used in kinetic(#1)
- Port to PyQt5 no toolbar so far, apparently this is not yet(?!) available in matplotlibs Qt5Agg backend.
- add screenshot to README.md
- add a screenshot file.
- Initial commit
- Contributors: Ryosuke Tajima, Simon Schmeisser
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | rospy | |
| 1 | rqt_gui | |
| 1 | rqt_gui_py | |
| 1 | roslint | |
| 1 | roslaunch | |
| 1 | rostest | |
| 1 | catkin | |
| 1 | control_msgs | |
| 1 | rqt_py_common | |
| 2 | trajectory_msgs | |
| 1 | moveit_msgs |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged rqt_joint_trajectory_plot at Robotics Stack Exchange
|
|
rqt_joint_trajectory_plot package from rqt_joint_trajectory_plot reporqt_joint_trajectory_plot |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tork-a/rqt_joint_trajectory_plot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-05-14 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Tokyo Opensource Robotics Kyokai (TORK) Developer Team
Authors
- Ryosuke Tajima
rqt_joint_trajectory_plot
To start up
Run rqt as:
$ rqt
Choose the 'Plugins'->'Visualization'->'JointTrajectoryPlot'
If you don't have any node to publish JointTrajectory, start dummy publisher as:
$ roslaunch rqt_joint_trajectory_plot generator.launch
To launch a pre-configured version of RQT with 3 plot tools to show Position, Velocity and Acceleration run as (the user is currently required to manually select pos, vel or accl for each plot):
$ roslaunch rqt_joint_trajectory_plot rqt_plot_trajectory_pva.launch
To select topic
Chooese the topic name from the pulldown menu. The menu has the topic of trajectory_msgs/JointTrajectory type. If you don't see target topic, push the reload button to refresh the topic list.
When you choose the topic, the plugin subscribe the target topic and ready to draw the curve in the plot area.
To select curve to plot
Click the checkbox of the target joint name. You can choose the curve of poistion, velocity, acceleration, and effort.
Beware the plugin redraws the graph each time when the new message arrived. If you want to stop the data update, push pause button.
Changelog for package rqt_joint_trajectory_plot
0.0.5 (2020-03-07)
- Add melodic
release(#13)
- Set CI python version to 3.6
- Merge pull request
- added ability to plot planned_path from moveit and made rqt launch
file(#10)
- updated package.xml to include moveit_msgs for plotting display_trajectory messages
- fixed example PVA image size
- added empty display trajectory check and updated readme with instrucitons to launch PVA perspective
- added ability to plot planned_path from moveit and made rqt launch file with custom perspective
- Fix workspace name for CI
(#11)
- Fix workspace name as https://github.com/tork-a/jog_control/pull/37/files
- added empty display trajectory check and updated readme with instrucitons to launch PVA perspective
- added ability to plot planned_path from moveit and made rqt launch file with custom perspective
- Add travis.yml
- Contributors: Ryosuke Tajima, marqrazz
0.0.4 (2018-06-14)
- Fix lint problem
- Contributors: Ryosuke Tajima
0.0.3 (2018-06-14)
- Check the qt version in plot_widget.py for indigo release(#9)
- Contributors: Ryosuke Tajima
0.0.2 (2018-06-08)
- Add script/rqt_joint_trajectory_plot(#7)
- Update to visualize FollowJointTrajectoryActionGoal(#6)
- Contributors: Kei Okada, Ryosuke Tajima
0.0.1 (2018-01-20)
- Organize and format package files
- roslint check
- autopep8 for python scripts
- Port to PyQt5 as used in kinetic(#1)
- Port to PyQt5 no toolbar so far, apparently this is not yet(?!) available in matplotlibs Qt5Agg backend.
- add screenshot to README.md
- add a screenshot file.
- Initial commit
- Contributors: Ryosuke Tajima, Simon Schmeisser
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | rospy | |
| 1 | rqt_gui | |
| 1 | rqt_gui_py | |
| 1 | roslint | |
| 1 | roslaunch | |
| 1 | rostest | |
| 1 | catkin | |
| 1 | control_msgs | |
| 1 | rqt_py_common | |
| 2 | trajectory_msgs | |
| 1 | moveit_msgs |