
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
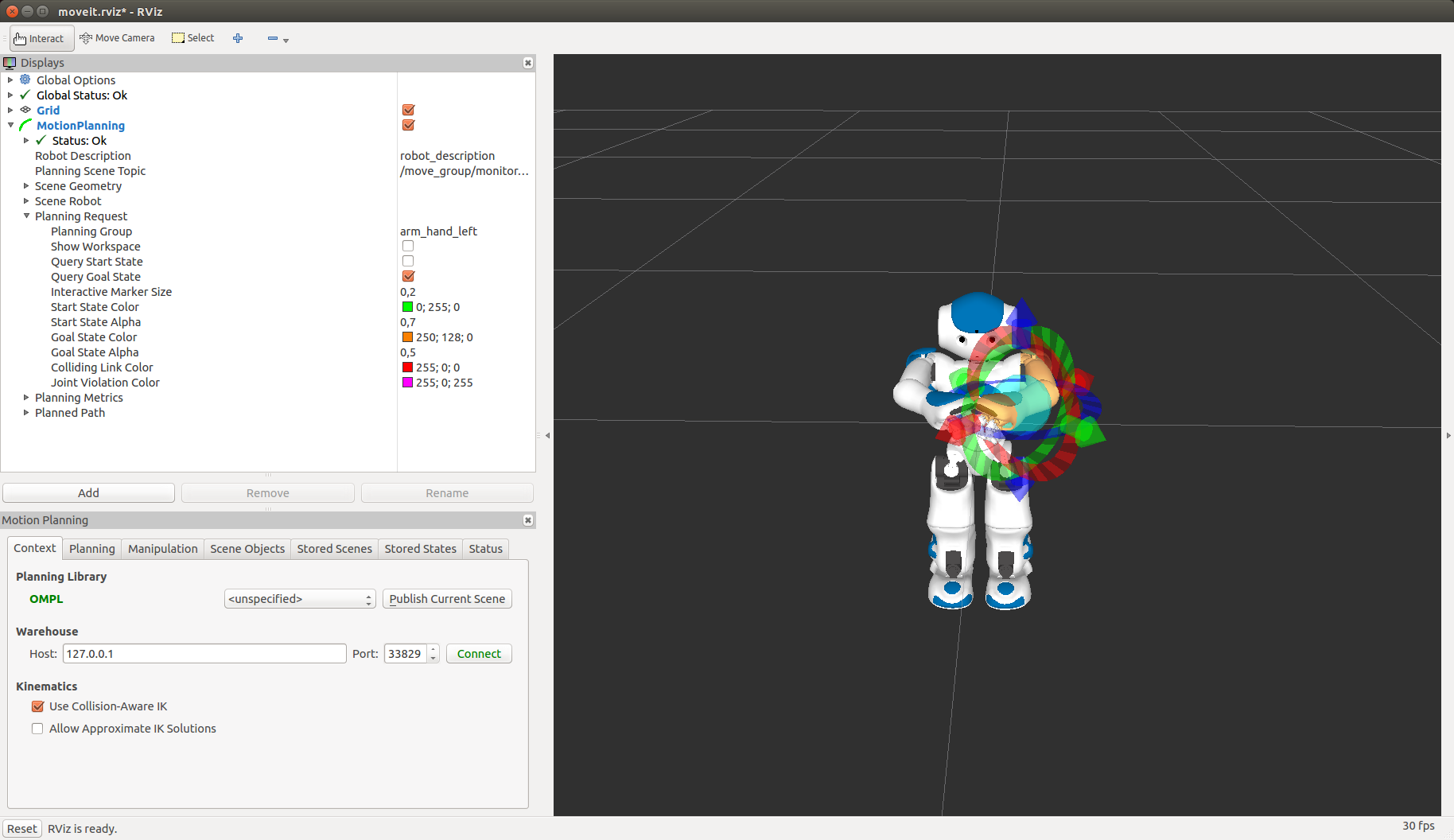 {width=”100.0%”}
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
Messages
Services
Plugins
Recent questions tagged nao_moveit_config at Robotics Stack Exchange
|
|
nao_moveit_config package from nao_moveit_config reponao_moveit_config |
ROS Distro
|
Package Summary
| Version | 0.0.11 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros-naoqi/nao_moveit_config.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-01-20 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Surya Ambrose
- Natalia Lyubova
Authors
- Mikael Arguedas
nao_moveit_config
This is a MoveIt! config package generated by the MoveIt! wizard. It requires a NAO model which you can get from here:
https://github.com/ros-naoqi/nao_robot/tree/master/nao_description or from the binary package : ros-indigo-nao-description
The moveit package must be run on a remote computer and not directly on your robot.
URDF and Textures used
This moveit package is based on a textured nao: https://github.com/ros-naoqi/nao_meshes
The urdf used for the generation of the configuration files is at: https://github.com/ros-naoqi/nao_robot
1. Compile the packages
nao_moveit_config package doesn't need any compilation so running rospack profile should be enough
For the dcm and gazebo packages you need to compile the C++ nodes. In order to compile nao_dcm packages, you need to set the environment variable AL_DIR to the path to naoqiSDK-c++ on your computer.
Then you can run the usual
catkin_make
And your ready to play with your nao
2. Run MoveIt
Without a robot -------------You can run this moveit package either unconnected to any robot or attached to a robot (real or simulated): For a standalone execution :
roslaunch nao_moveit_config demo.launch
Once launching the demo, you should see the robot in MoveIt! GUI like this:
{width=”100.0%”}
On a real robot -------------To launch it on a real nao you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual)
First, set NAO_IP environment variable to your robot's IP address:
export NAO_IP=<YOUR_ROBOT_IP>
Launch the DCM bringup:
roslaunch nao_dcm_bringup nao_dcm_H25_bringup_remote.launch
Wait until it is ready, then run:
roslaunch nao_moveit_config moveit_planner.launch
On a simulated robot (in Gazebo) ------------------------------To use MoveIt! with Gazebo simulation, you need: - nao_dcm_bringup (https://github.com/ros-aldebaran/nao_dcm_robot) - nao_control (https://github.com/ros-aldebaran/nao_virtual) - nao_gazebo_plugin (https://github.com/ros-aldebaran/nao_virtual)
Launch Gazebo, like this:
roslaunch nao_gazebo_plugin nao_gazebo_plugin_H25.launch
Wait until it is ready, then click on the Play button in Gazebo.
Finally, start MoveIt!:
roslaunch nao_moveit_config moveit_planner.launch
This is based on the work of Konstantinos Chatzilygeroudis: https://github.com/costashatz/nao_dcm.
3 Use Moveit:
File truncated at 100 lines see the full file
Changelog for package nao_moveit_config
0.0.11 (2017-01-20)
- Merge pull request #18 from ros-naoqi/update_maintainers update maintainers
- update maintainers
- Merge pull request #17 from ros-naoqi/nlyubova-patch-2 Update the execution time
- Update the execution time
- Merge pull request #16 from ros-naoqi/fix-deprecated-warnings Fix deprecated warnings
- update parameter namespace
- fix deprecated xacro call
- use action rather than service for trajectory execution
- Contributors: Mikael Arguedas, Natalia Lyubova
0.0.10 (2016-09-18)
- Update README.rst
- adding RRT as default planner
- remove vrabaud as a maintainer
- Merge pull request #12 from ros-naoqi/update_dead_links update dead links
- update dead links
- updating the README
- Contributors: Mikael Arguedas, Natalia Lyubova, Vincent Rabaud
0.0.9 (2016-02-03)
- remove nao_meshes from dependency because license not displayed on buildfarm
- Contributors: Mikael Arguedas
0.0.8 (2016-02-03)
- updated dependency list
- Contributors: Mikael Arguedas
0.0.7 (2016-01-23)
- homogenize group names to match side_bodyChain
- added end effectors for legs
- update collision matrix: fix collision on NAO's feet
- rename demo_real.launch into moveit_planner.launch to match tutorials
- Merge pull request #9 from nlyubova/master missing collisions
- fixing srdf, adding missing collisions
- fixing the projection_evaluator joints for hand groups
- added demo_real.launch from nlyubova's fork
- Contributors: Mikael Arguedas, Vincent Rabaud, nlyubova
0.0.6 (2015-10-21)
- updating the readme
- fixing the config for the most recent urdf
- add myself as a maintainer
- Contributors: Vincent Rabaud, nlyubova
- add myself as a maintainer
- Contributors: Vincent Rabaud
0.0.5 (2015-05-25)
- install the .setup_assistant file for potential introspection
- remove the URDF and fix the README
- add a .setup_assistant
- Added foot and pelvis fake controllers
- Added foot and pelvis controllers
- Contributors: Arguedas Mikael, Konstantinos Chatzilygeroudis, Vincent Rabaud
0.0.4 (2014-12-04)
- fixed collision for ankle
- fixed path to xacro file
- fixed hand links names
- Update README.rst Added note for missing deppendency
- add missing dependency
- added moveit tutorial
- Contributors: Arguedas Mikael, Mikael ARGUEDAS, margueda
0.0.3 (2014-10-01)
- update README
- Merge branch 'master' of github.com:ros-nao/nao_moveit_config
- unify group names to match romeo_moveit_config agreement
- Update README.rst
- Update README.rst
- fixed dependencies and update README
- Initial tracks.yaml
- Contributors: Arguedas Mikael, margueda
0.0.2 (2014-09-24)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/default_warehouse_db.launch
-
- reset [default: false]
- launch/demo.launch
-
- db [default: false]
- debug [default: false]
- launch/move_group.launch
-
- debug [default: false]
- info [default: $(arg debug)]
- allow_trajectory_execution [default: true]
- fake_execution [default: false]
- max_safe_path_cost [default: 1]
- jiggle_fraction [default: 0.05]
- publish_monitored_planning_scene [default: true]
- launch/moveit_planner.launch
-
- db [default: false]
- debug [default: false]
- launch/moveit_rviz.launch
-
- debug [default: false]
- config [default: false]
- launch/ompl_planning_pipeline.launch
- launch/planning_context.launch
-
- load_robot_description [default: false]
- robot_description [default: robot_description]
- version [default: V40]
- launch/planning_pipeline.launch
-
- pipeline [default: ompl]
- launch/run_benchmark_ompl.launch
-
- cfg
- launch/sensor_manager.launch
-
- moveit_sensor_manager [default: nao]
- launch/setup_assistant.launch
- Re-launch the MoveIt Setup Assistant with this configuration package already loaded
-
- debug [default: false]
- launch/trajectory_execution.launch
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: nao]
- launch/warehouse.launch
-
- moveit_warehouse_database_path
- launch/warehouse_settings.launch
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]
- launch/NaoH25V40_moveit_controller_manager.launch.xml
-
- moveit_controller_manager [default: moveit_simple_controller_manager/MoveItSimpleControllerManager]
- use_controller_manager [default: true]
- launch/NaoH25V40_moveit_sensor_manager.launch.xml
-
- moveit_sensor_manager [default: pr2_moveit_sensor_manager/Pr2MoveItSensorManager]
- moveit_octomap_sensor_params_file [default: $(find nao_moveit_config)/config/sensors_xtion.yaml]
- head_pointing_frame [default: /CameraDepth_frame]
- launch/fake_moveit_controller_manager.launch.xml
- launch/ompl_planning_pipeline.launch.xml
- launch/planning_pipeline.launch.xml
-
- pipeline [default: ompl]
- launch/sensor_manager.launch.xml
-
- moveit_sensor_manager [default: NaoH25V40]
- launch/trajectory_execution.launch.xml
-
- moveit_manage_controllers [default: true]
- moveit_controller_manager [default: NaoH25V40]
- launch/warehouse_settings.launch.xml
-
- moveit_warehouse_port [default: 33829]
- moveit_warehouse_host [default: localhost]