
|
laser_segmentation package from laser_segmentation repolaser_segmentation |
|
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.1 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ajtudela/laser_segmentation.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Alberto Tudela
- Manuel Fernandez-Carmona
Authors
- Alberto Tudela
laser_segmentation

![]()
![]()
Overview
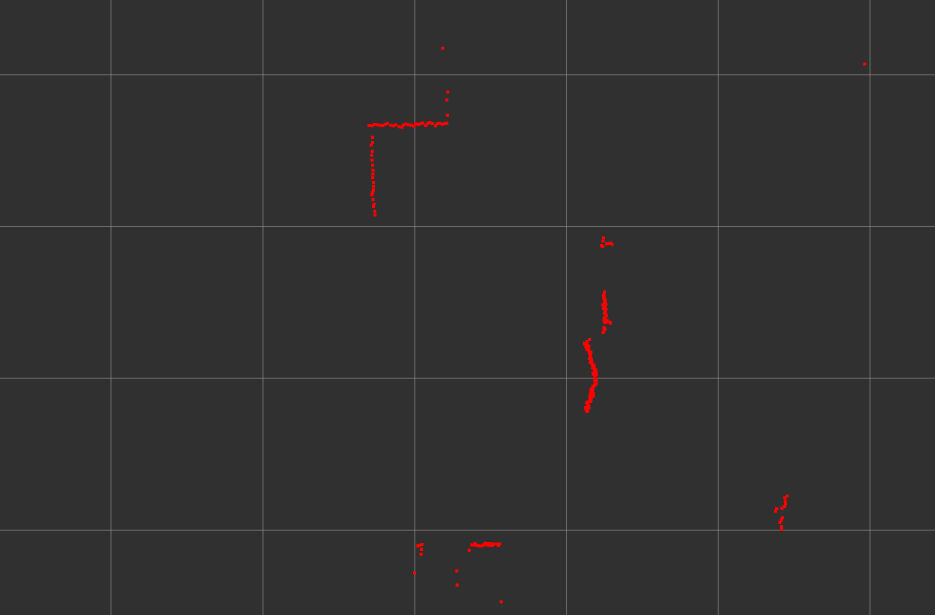
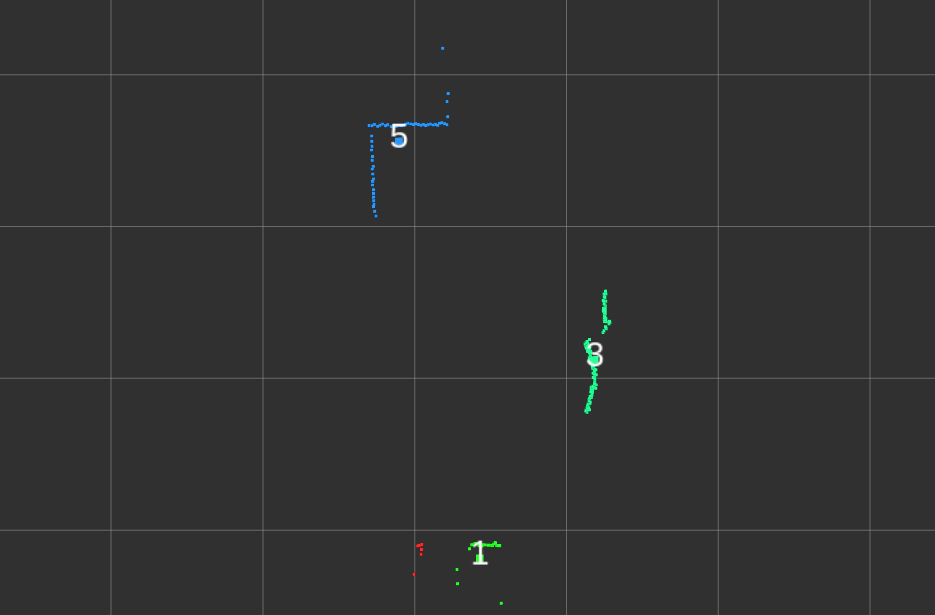
Implementation of differents algorithms for segmentation of laserscans, splitting them into subsets of beams, with a ROS2 interface. The currently implemented algorithm are:
-
Jump distance clustering:widely used method for 2D laser range data in mobile robotics. It's a simple and fast method to segment the scans: if the Euclidean distance between two adjacent beams exceeds a given threshold distance, a new segment is generated. -
Jump distance clustering and merge:Similar algorithm as above but checks if pre-predecessor segments are close to each other. This deals with over-segmented data with many small cluster in outdoor environment. It uses the same threshold condition twice.
In the two implementation mentioned above the jump distance threshold is fixed. However, a dynamic jump distance threshold can be calculated using methods of Lee (Lee, 2001), Dietmayer (Dietmayer, et al., 2001) and Santos (Santos, et al., 2003). See the parameters list below to change between them.
Includes a dynamic reconfigure server parameter to change online the configuration of the algorithms and the filtering.
| Laser scan | Segments |
|---|---|
 |
 |
Keywords: ROS2, laser, segmentation, clustering
Author: Alberto Tudela
The laser_segmentation package has been tested under ROS2 Humble on Ubuntu 22.04. This is research code, expect that it changes often and any fitness for a particular purpose is disclaimed.
Installation
Building from Source
Dependencies
- Robot Operating System (ROS) 2 (middleware for robotics),
- slg_msgs (Library and messages to interact with laser related geometry - use Humble branch),
Building
To build from source, clone the latest version from the main repository into your colcon workspace and compile the package using
cd colcon_workspace/src
git clone https://github.com/ajtudela/laser_segmentation.git -b humble
cd ../
rosdep install -i --from-path src --rosdistro humble -y
colcon build --symlink-install
Usage
With some scan source running, run the laser_segmentation node with: ros2 launch laser_segmentation segmentation.launch.py
Nodes
laser_segmentation
Segmentation of the laserscans.
Subscribed Topics
-
scan(sensor_msgs/LaserScan)Laser scan topic where segmentation will be performed.
Published Topics
-
segments(slg_msgs/SegmentArray)Splitted segments resulting of the segmentation.
-
segments/visualization(visualization_msgs/MarkerArray)It comprises three namespaces:
Parameters
-
scan_topic(string, default: "scan")Topic of the laserscan.
-
segment_topic(string, default: "segments")Topic of the segmented laser scan.
-
segmentation_type(string, default: "jump_distance")Choose between several segmentation algorithms. Jump distance clustering (
jump_distance) and jump distance and merge (jump_distance_merge).
Parameters for filtering
-
min_points_segment(int, default: 3)Minimium number of points per segment.
-
max_points_segment(int, default: 200)Maximum number of points per segment.
-
min_avg_distance_from_sensor(double, default: 0.0)Minimium average distance from sensor.
-
max_avg_distance_from_sensor(double, default: 20.0)Maximum average distance from sensor.
-
min_segment_width(double, default: 0.2)Minimium width of the segment.
-
max_segment_width(double, default: 10.0)Maximum width of the segment.
Parameters for segmentation algorithms
-
method_threshold(string, default: "")Method to calculate a dynamic jump distance threshold in jump_distance or jump_distance_merge algorithms. This value and methods are based on
lee(Lee, 2001),diet(Dietmayer, et al., 2001) orsantos(Santos, et al., 2003). -
distance_threshold(double, default: 0.3)If none of the algorithms mentioned above is selected, this parameters will be use as the jump distance above which a new segment is created.
-
noise_reduction(double, default: 0.3)Parameter for noise reduction in "Santos" and "Dietmayer" algorithms.
Changelog for package laser_segmentation
3.0.1 (12-06-2024)
- Remove nav2_util dependency.
3.0.0 (08-03-2024)
- Improve formatting.
- Improve documentation of source.
- Converted to Lifecycle node.
- Converted to component.
- Rename header and source files.
- Move parameters to new class: parameterHandler.
- Rename show_visualization to create_segment_viz_points.
- Fix jump distance merge.
- Add unit testing.
2.1.2 (23-06-2023)
- Rename visualization topic.
2.1.1 (29-11-2022)
- Add hierarchy between segmentationJumpDistance and segmentationJumpDistanceMerge to avoid code redundancy.
- Rise up centroids visualization.
2.1.0 (28-11-2022)
- Added include to find slg_msgs library.
- Added launch with some non-default param values.
- Minor changes to configuration info display.
- Added params folder with two yaml config files.
- Launch file now relies on config files, it is its only argument.
- Minor changes to range values in laser_segmentation paramas to accept smaller granularity.
- Added rviz CUBE marker with segment centroids.
- Reunited all markers into a single topic, using three namespaces.
- Added license.
2.0.0 (15-10-2022)
- First ROS2 (Humble) version.
- Contributors: Manuel Fernandez-Carmona
1.2.1 (20-10-2022)
- Rename segment_topic to segments_topic.
1.2.0 (03-05-2022)
- Added noise reduction parameter.
- Push a delete marker before the others. I hope this fix the RViz problem.
1.1.3 (13-01-2022)
- Refactoring jump distance and jump distance merge.
- Added jump between points with NaN values.
- Fix merge of first and last segments.
1.1.2 (12-01-2022)
- Update simple_laser_geometry to 3.2.0.
- Checking of NaN points.
- Change lifetime of markers.
1.1.1 (23-12-2021)
- Check publisher before doing any calculations.
1.1.0 (15-12-2021)
- Change segment marker to markerArray.
- Publish id of the segment as markerArray.
- Change the color palette.
- Fix jump distance merge.
1.0.1 (15-12-2021)
- Update simple_laser_geometry to 3.0.0.
1.0.0 (14-12-2021)
- Changes to new simple laser geometry library.
- Add max width filter.
- Remove readDataPoints.
- Added option to select threshold method.
- Update dynamic jump distance methods.
- Improve jump distance merge.
0.0.0 (-)
- Initial release.
- Create README.md.
- Added laserSegmentation class (.h and .cpp files).
- Added segmentationJumpDistance class (.h and .cpp files).
- Added segmentationJumpDistanceMerge class (.h and .cpp files).
- Added SegmentationParameters.cfg configuration files.
- Added launch files.
- Contributors: Alberto Tudela
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | ament_cmake | |
| 1 | ament_lint_auto | |
| 1 | ament_lint_common | |
| 1 | ament_cmake_gtest | |
| 1 | rclcpp | |
| 1 | rclcpp_lifecycle | |
| 1 | rclcpp_components | |
| 2 | std_msgs | |
| 2 | sensor_msgs | |
| 2 | visualization_msgs | |
| 1 | slg_msgs |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged laser_segmentation at Robotics Stack Exchange
|
|
laser_segmentation package from laser_segmentation repolaser_segmentation |
|
|
Package Summary
| Tags | No category tags. |
| Version | 3.0.1 |
| License | Apache-2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ajtudela/laser_segmentation.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-06-19 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Alberto Tudela
- Manuel Fernandez-Carmona
Authors
- Alberto Tudela
laser_segmentation
![]()
![]()
Overview
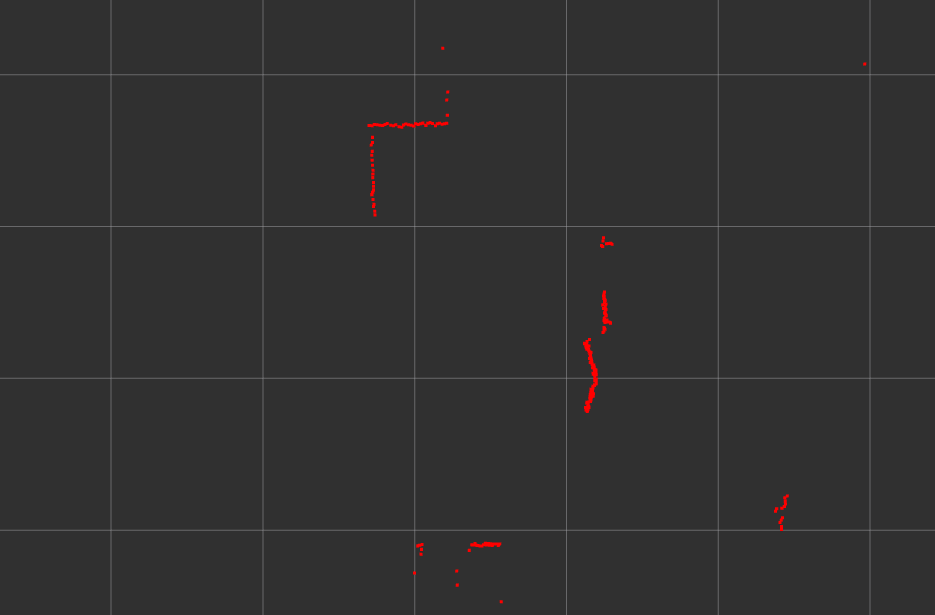
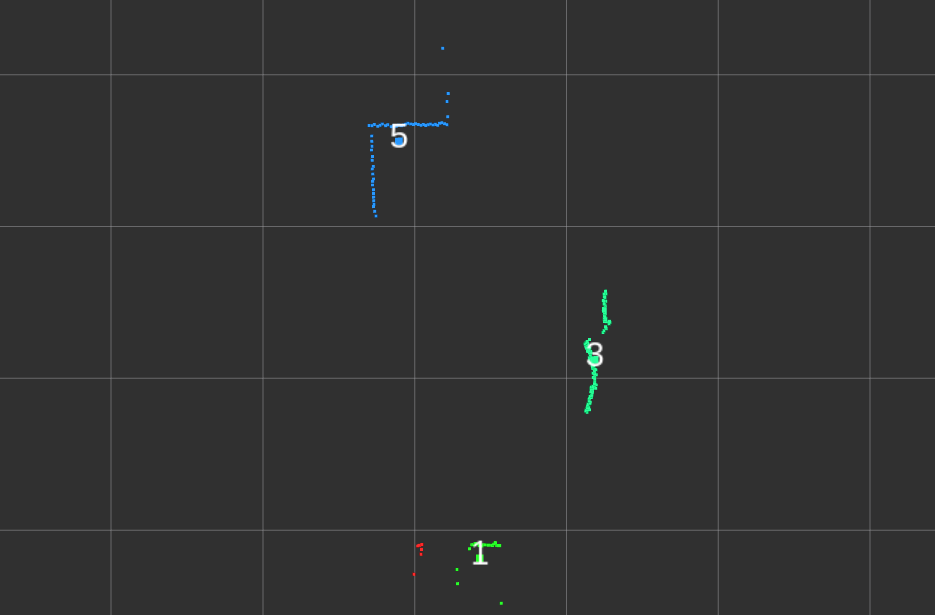
Implementation of differents algorithms for segmentation of laserscans, splitting them into subsets of beams, with a ROS2 interface. The currently implemented algorithm are:
-
Jump distance clustering:widely used method for 2D laser range data in mobile robotics. It's a simple and fast method to segment the scans: if the Euclidean distance between two adjacent beams exceeds a given threshold distance, a new segment is generated. -
Jump distance clustering and merge:Similar algorithm as above but checks if pre-predecessor segments are close to each other. This deals with over-segmented data with many small cluster in outdoor environment. It uses the same threshold condition twice.
In the two implementation mentioned above the jump distance threshold is fixed. However, a dynamic jump distance threshold can be calculated using methods of Lee (Lee, 2001), Dietmayer (Dietmayer, et al., 2001) and Santos (Santos, et al., 2003). See the parameters list below to change between them.
Includes a dynamic reconfigure server parameter to change online the configuration of the algorithms and the filtering.
| Laser scan | Segments |
|---|---|
 |
 |
Keywords: ROS2, laser, segmentation, clustering
Author: Alberto Tudela
The laser_segmentation package has been tested under ROS2 Humble on Ubuntu 22.04. This is research code, expect that it changes often and any fitness for a particular purpose is disclaimed.
Installation
Building from Source
Dependencies
- Robot Operating System (ROS) 2 (middleware for robotics),
- slg_msgs (Library and messages to interact with laser related geometry - use Humble branch),
Building
To build from source, clone the latest version from the main repository into your colcon workspace and compile the package using
cd colcon_workspace/src
git clone https://github.com/ajtudela/laser_segmentation.git -b humble
cd ../
rosdep install -i --from-path src --rosdistro humble -y
colcon build --symlink-install
Usage
With some scan source running, run the laser_segmentation node with: ros2 launch laser_segmentation segmentation.launch.py
Nodes
laser_segmentation
Segmentation of the laserscans.
Subscribed Topics
-
scan(sensor_msgs/LaserScan)Laser scan topic where segmentation will be performed.
Published Topics
-
segments(slg_msgs/SegmentArray)Splitted segments resulting of the segmentation.
-
segments/visualization(visualization_msgs/MarkerArray)It comprises three namespaces:
Parameters
-
scan_topic(string, default: "scan")Topic of the laserscan.
-
segment_topic(string, default: "segments")Topic of the segmented laser scan.
-
segmentation_type(string, default: "jump_distance")Choose between several segmentation algorithms. Jump distance clustering (
jump_distance) and jump distance and merge (jump_distance_merge).
Parameters for filtering
-
min_points_segment(int, default: 3)Minimium number of points per segment.
-
max_points_segment(int, default: 200)Maximum number of points per segment.
-
min_avg_distance_from_sensor(double, default: 0.0)Minimium average distance from sensor.
-
max_avg_distance_from_sensor(double, default: 20.0)Maximum average distance from sensor.
-
min_segment_width(double, default: 0.2)Minimium width of the segment.
-
max_segment_width(double, default: 10.0)Maximum width of the segment.
Parameters for segmentation algorithms
-
method_threshold(string, default: "")Method to calculate a dynamic jump distance threshold in jump_distance or jump_distance_merge algorithms. This value and methods are based on
lee(Lee, 2001),diet(Dietmayer, et al., 2001) orsantos(Santos, et al., 2003). -
distance_threshold(double, default: 0.3)If none of the algorithms mentioned above is selected, this parameters will be use as the jump distance above which a new segment is created.
-
noise_reduction(double, default: 0.3)Parameter for noise reduction in "Santos" and "Dietmayer" algorithms.
Changelog for package laser_segmentation
3.0.1 (12-06-2024)
- Remove nav2_util dependency.
3.0.0 (08-03-2024)
- Improve formatting.
- Improve documentation of source.
- Converted to Lifecycle node.
- Converted to component.
- Rename header and source files.
- Move parameters to new class: parameterHandler.
- Rename show_visualization to create_segment_viz_points.
- Fix jump distance merge.
- Add unit testing.
2.1.2 (23-06-2023)
- Rename visualization topic.
2.1.1 (29-11-2022)
- Add hierarchy between segmentationJumpDistance and segmentationJumpDistanceMerge to avoid code redundancy.
- Rise up centroids visualization.
2.1.0 (28-11-2022)
- Added include to find slg_msgs library.
- Added launch with some non-default param values.
- Minor changes to configuration info display.
- Added params folder with two yaml config files.
- Launch file now relies on config files, it is its only argument.
- Minor changes to range values in laser_segmentation paramas to accept smaller granularity.
- Added rviz CUBE marker with segment centroids.
- Reunited all markers into a single topic, using three namespaces.
- Added license.
2.0.0 (15-10-2022)
- First ROS2 (Humble) version.
- Contributors: Manuel Fernandez-Carmona
1.2.1 (20-10-2022)
- Rename segment_topic to segments_topic.
1.2.0 (03-05-2022)
- Added noise reduction parameter.
- Push a delete marker before the others. I hope this fix the RViz problem.
1.1.3 (13-01-2022)
- Refactoring jump distance and jump distance merge.
- Added jump between points with NaN values.
- Fix merge of first and last segments.
1.1.2 (12-01-2022)
- Update simple_laser_geometry to 3.2.0.
- Checking of NaN points.
- Change lifetime of markers.
1.1.1 (23-12-2021)
- Check publisher before doing any calculations.
1.1.0 (15-12-2021)
- Change segment marker to markerArray.
- Publish id of the segment as markerArray.
- Change the color palette.
- Fix jump distance merge.
1.0.1 (15-12-2021)
- Update simple_laser_geometry to 3.0.0.
1.0.0 (14-12-2021)
- Changes to new simple laser geometry library.
- Add max width filter.
- Remove readDataPoints.
- Added option to select threshold method.
- Update dynamic jump distance methods.
- Improve jump distance merge.
0.0.0 (-)
- Initial release.
- Create README.md.
- Added laserSegmentation class (.h and .cpp files).
- Added segmentationJumpDistance class (.h and .cpp files).
- Added segmentationJumpDistanceMerge class (.h and .cpp files).
- Added SegmentationParameters.cfg configuration files.
- Added launch files.
- Contributors: Alberto Tudela
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | ament_cmake | |
| 1 | ament_lint_auto | |
| 1 | ament_lint_common | |
| 1 | ament_cmake_gtest | |
| 1 | rclcpp | |
| 1 | rclcpp_lifecycle | |
| 1 | rclcpp_components | |
| 2 | sensor_msgs | |
| 2 | visualization_msgs | |
| 1 | slg_msgs |