
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
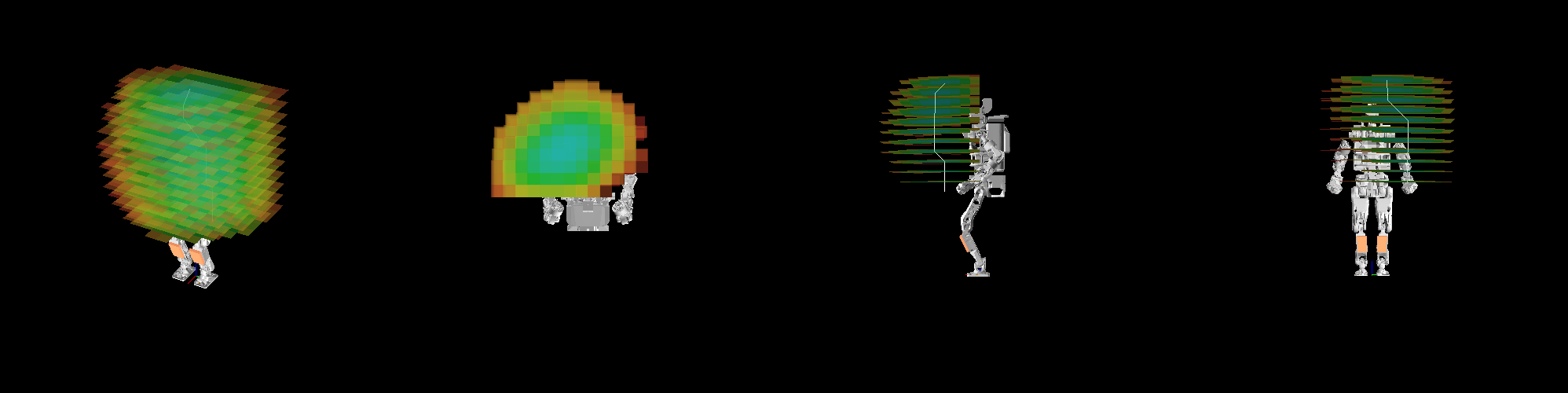
jsk_ik_server
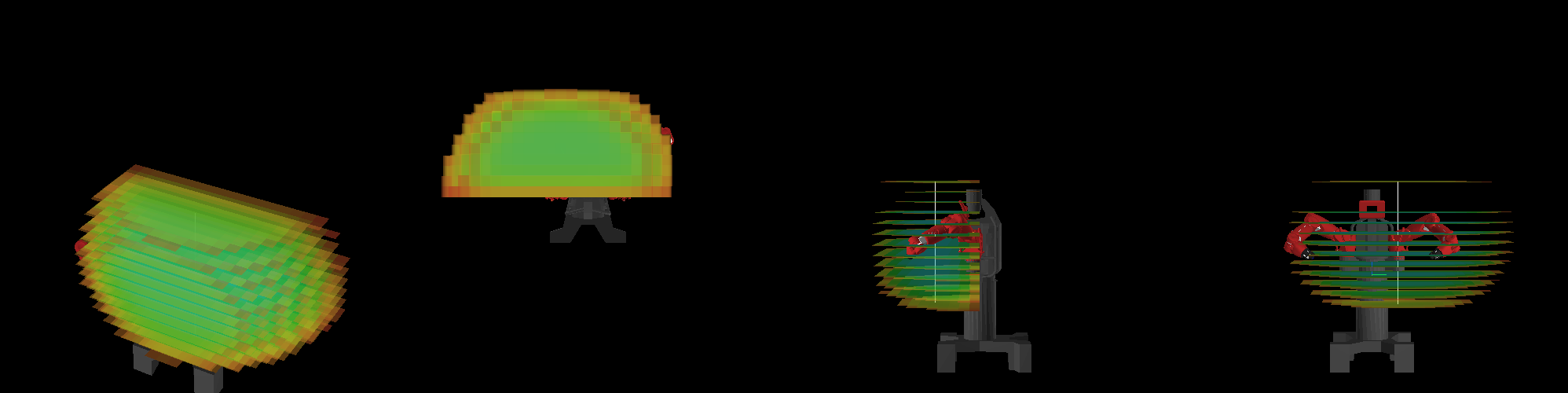
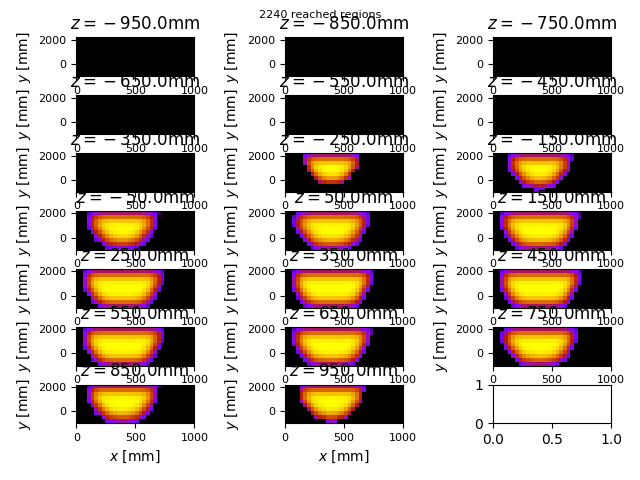
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
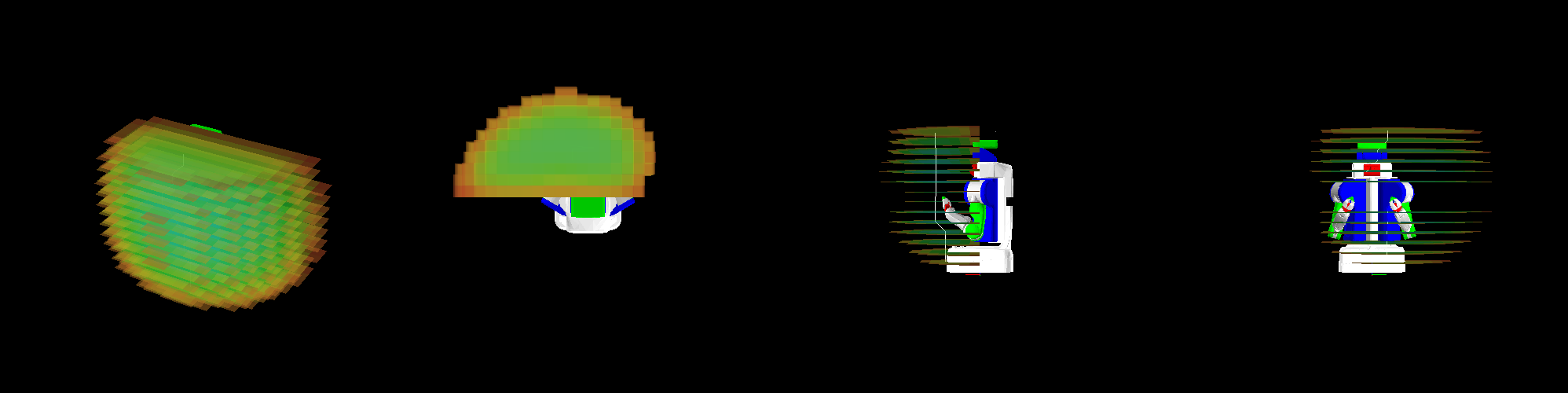
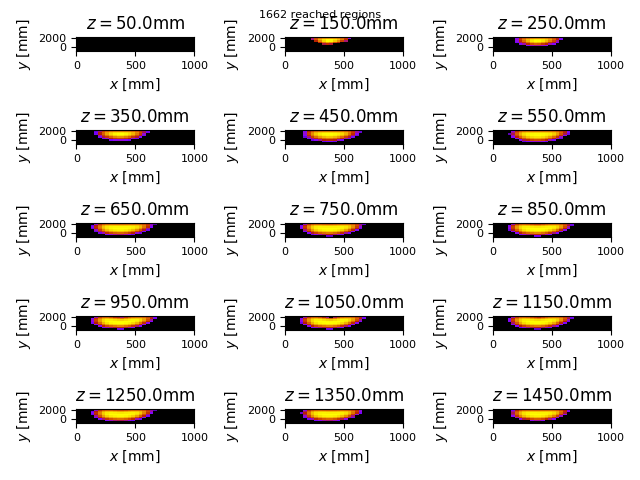
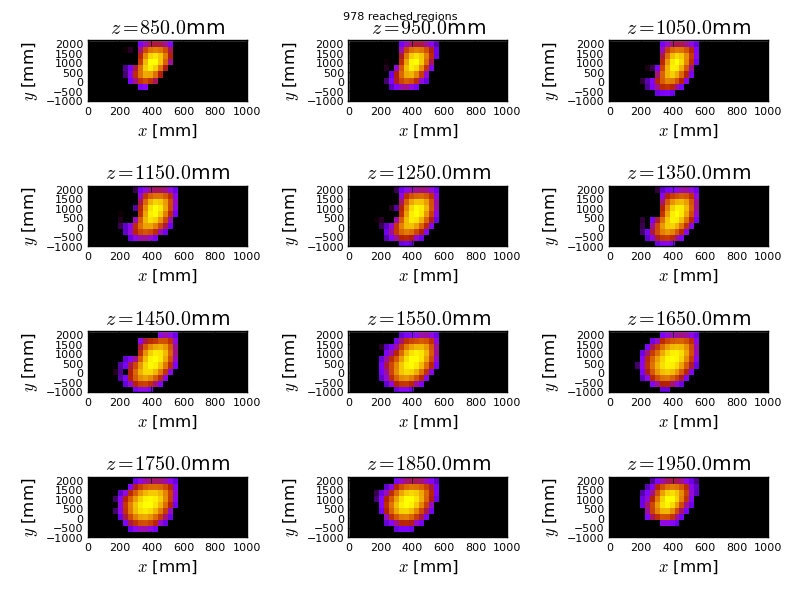
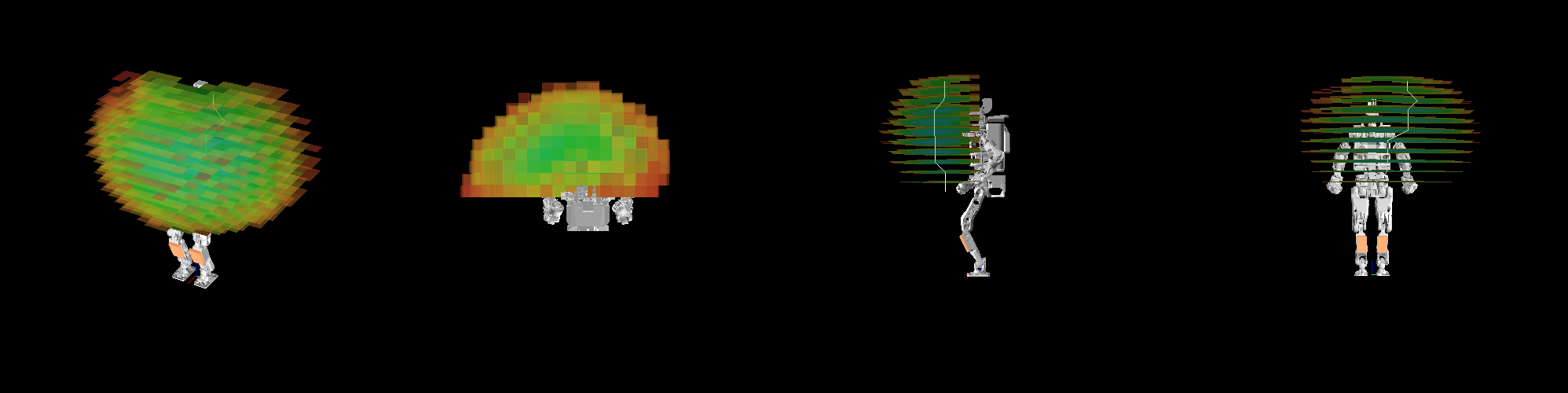
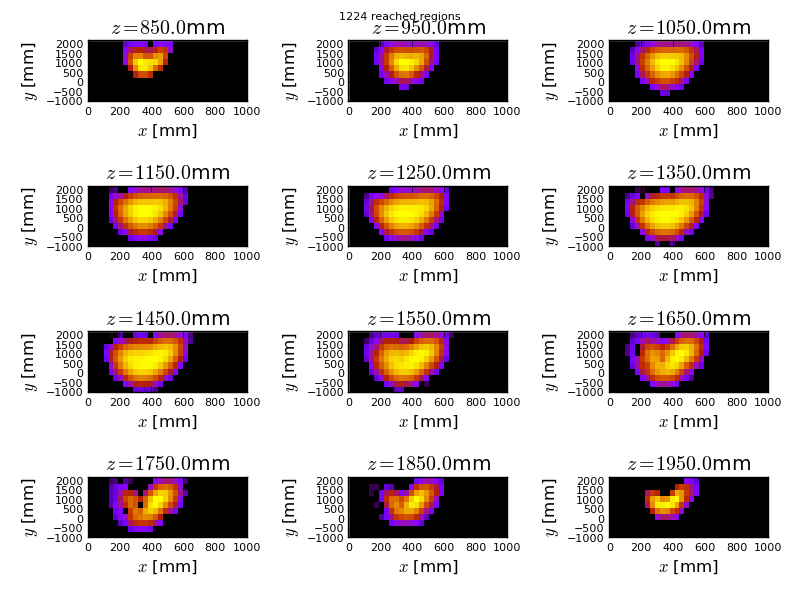
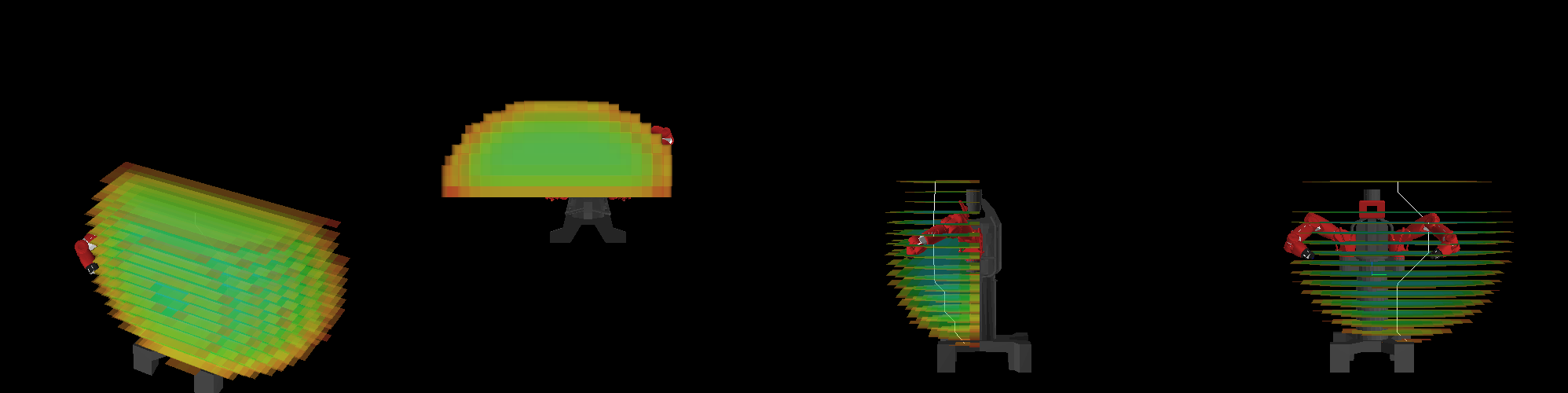
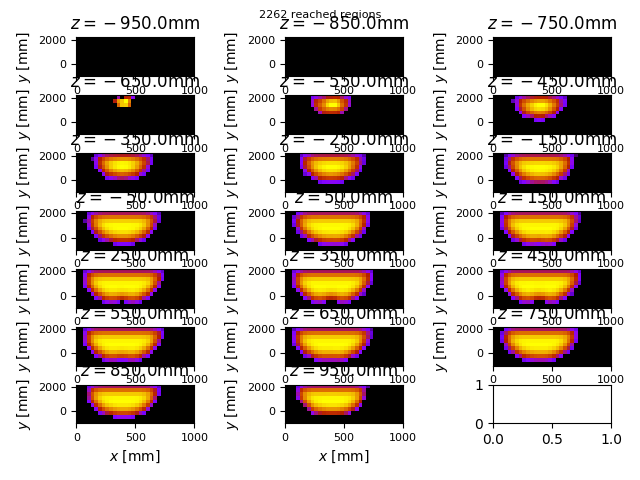
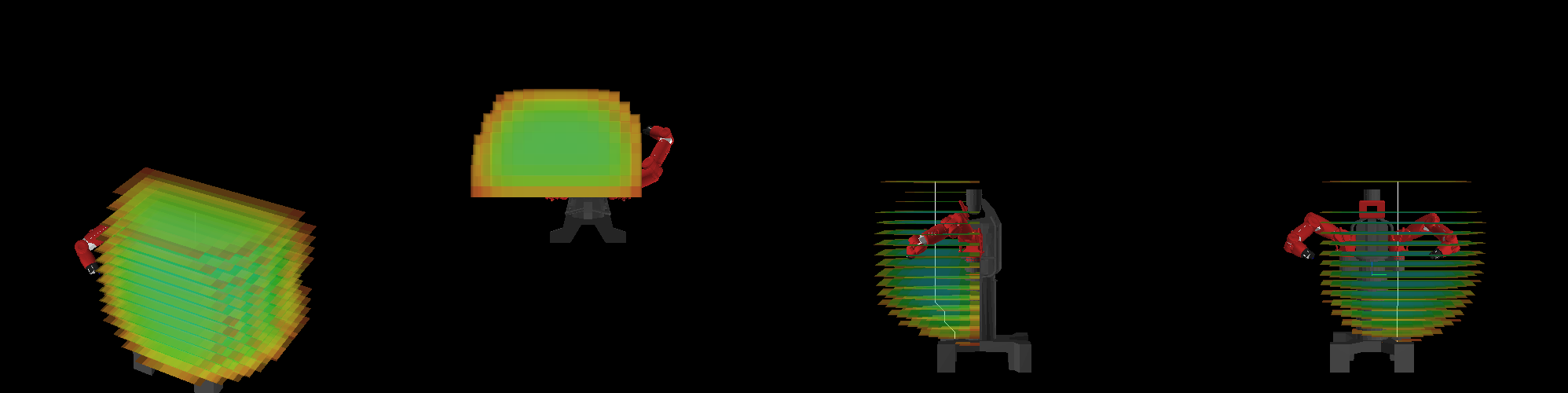
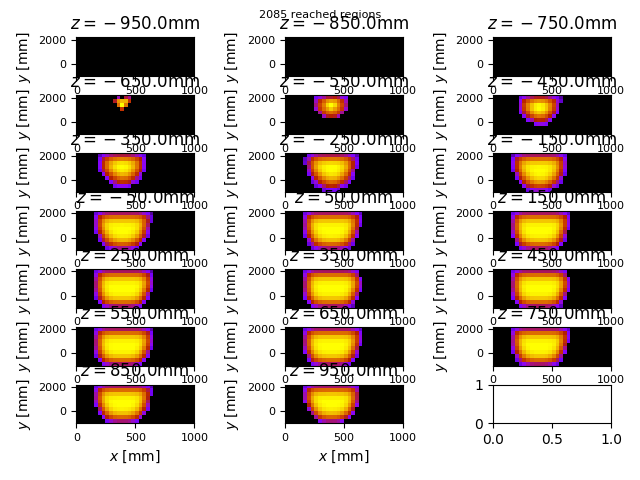
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
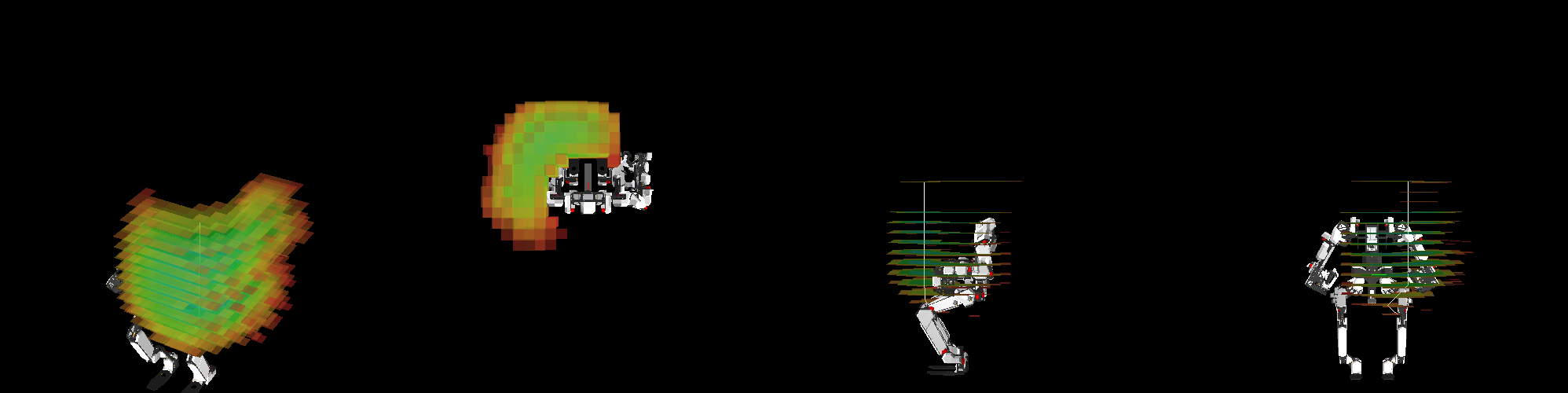
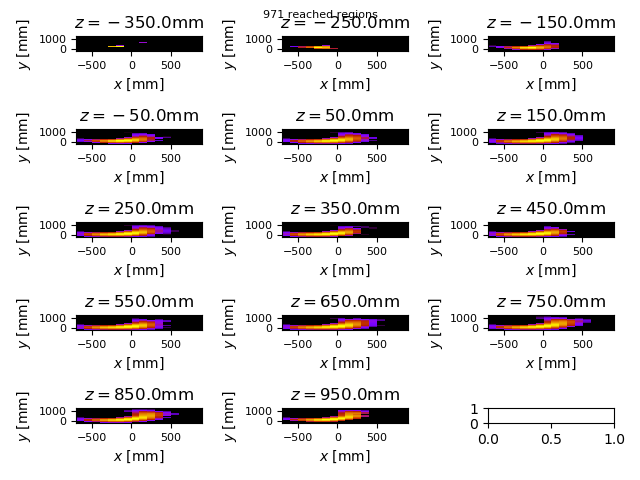
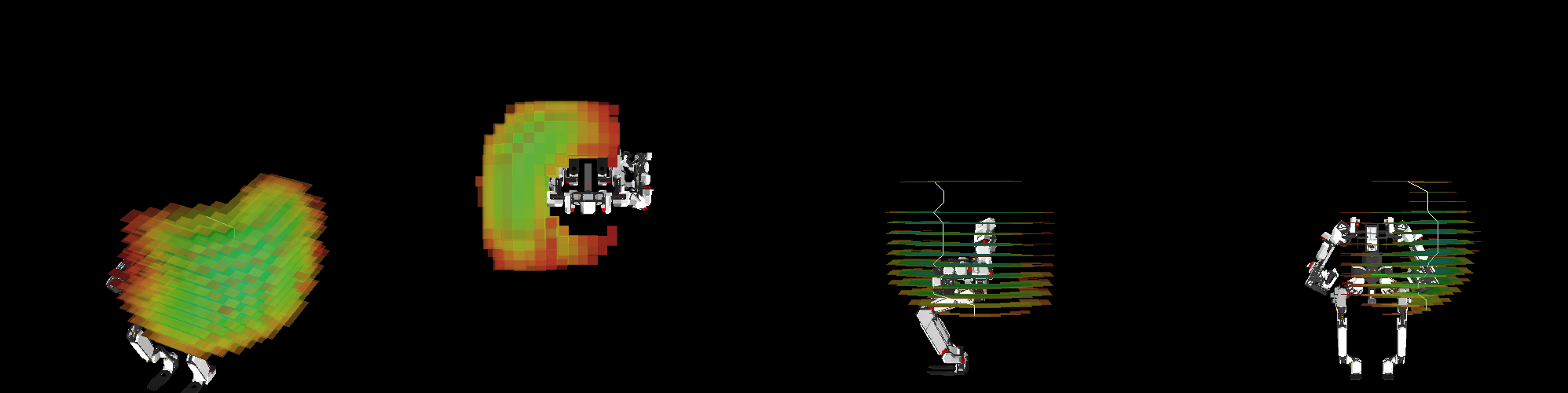
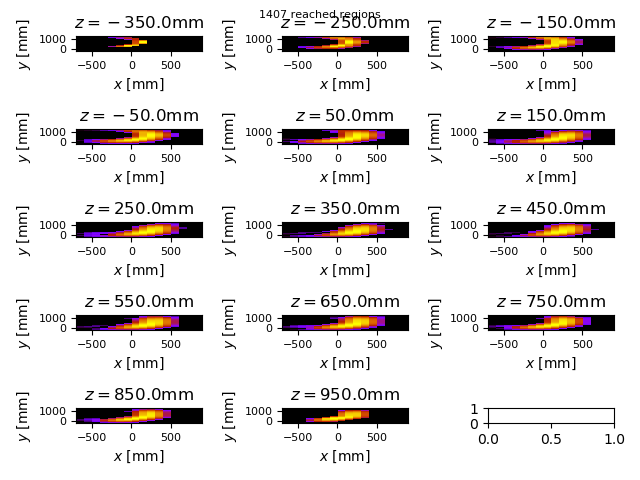
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
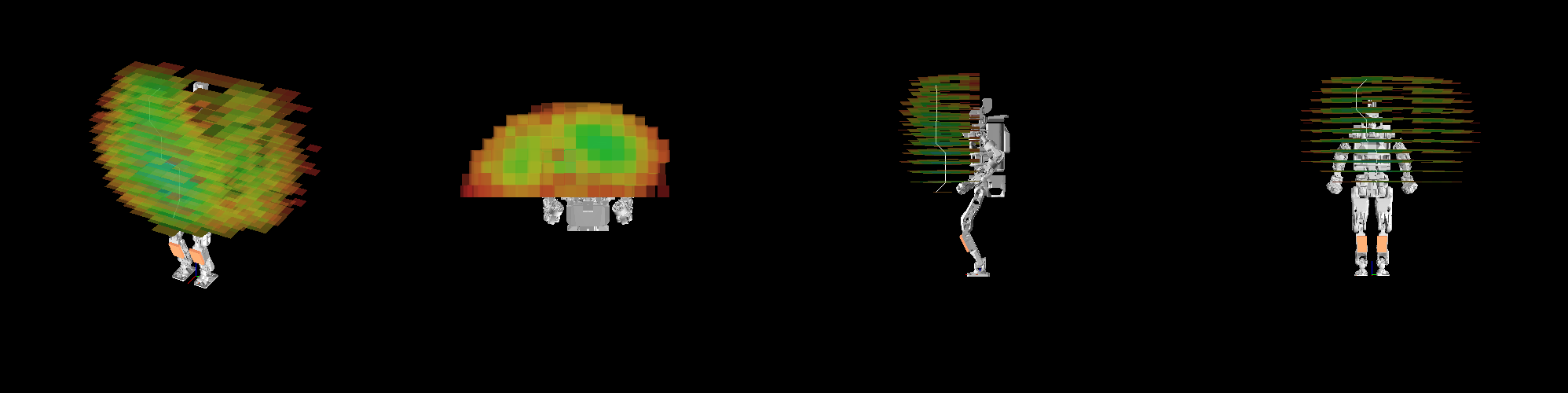
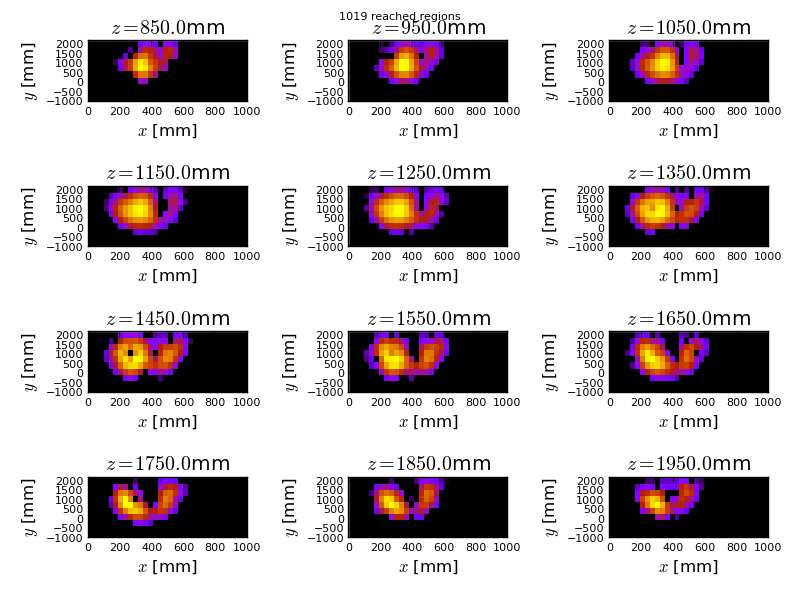
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
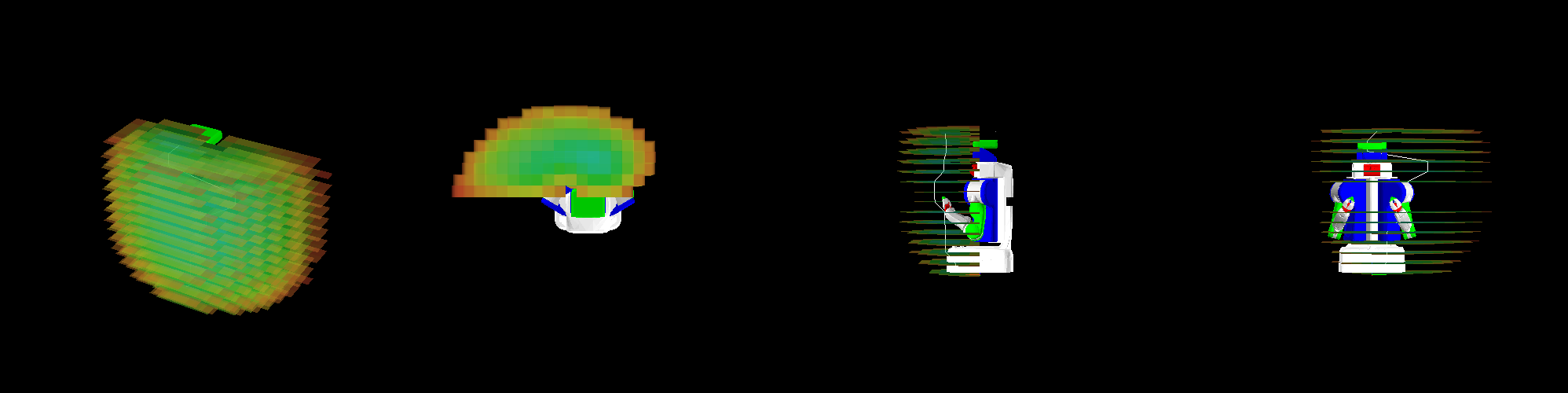
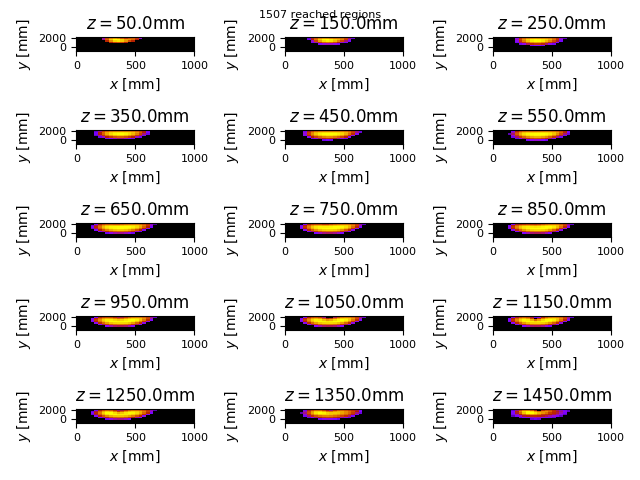
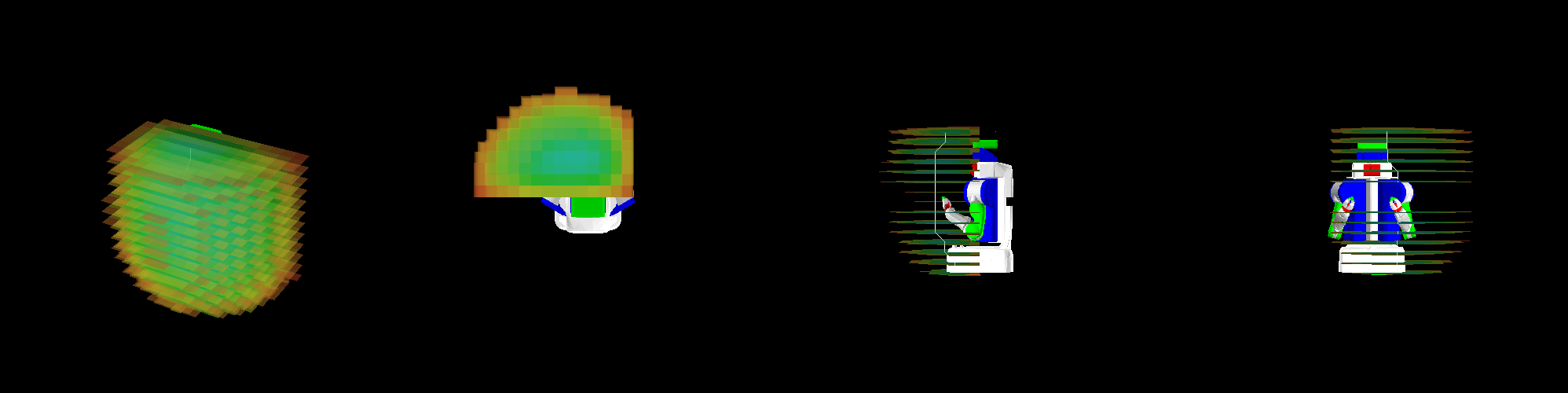
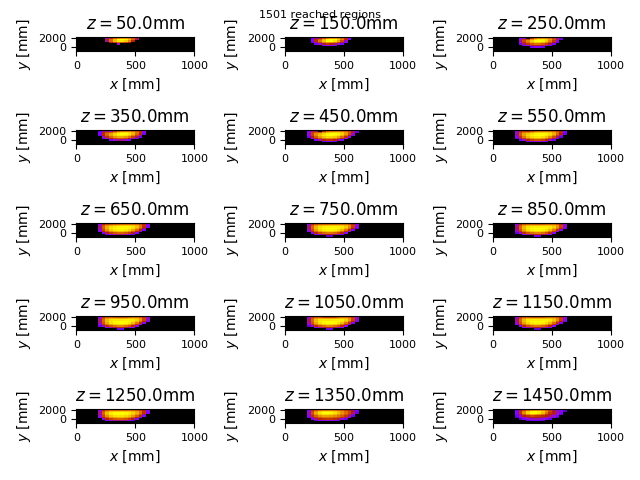
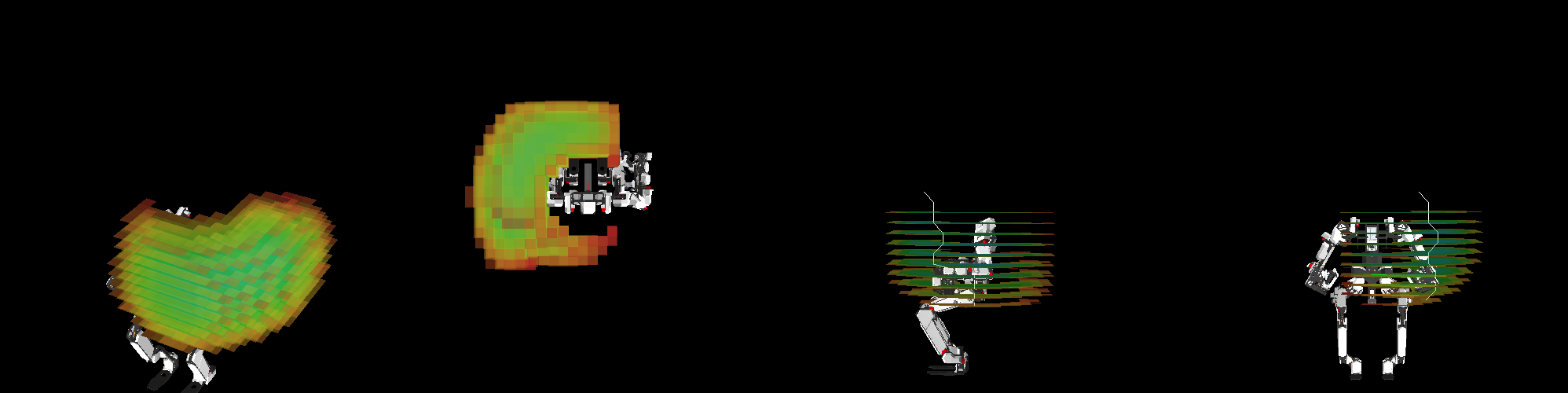
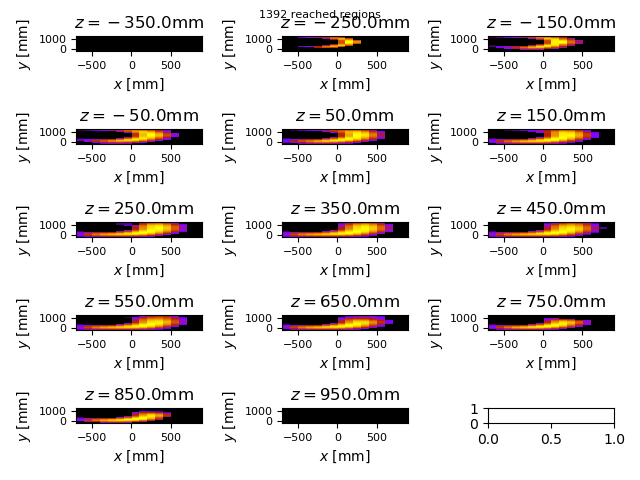
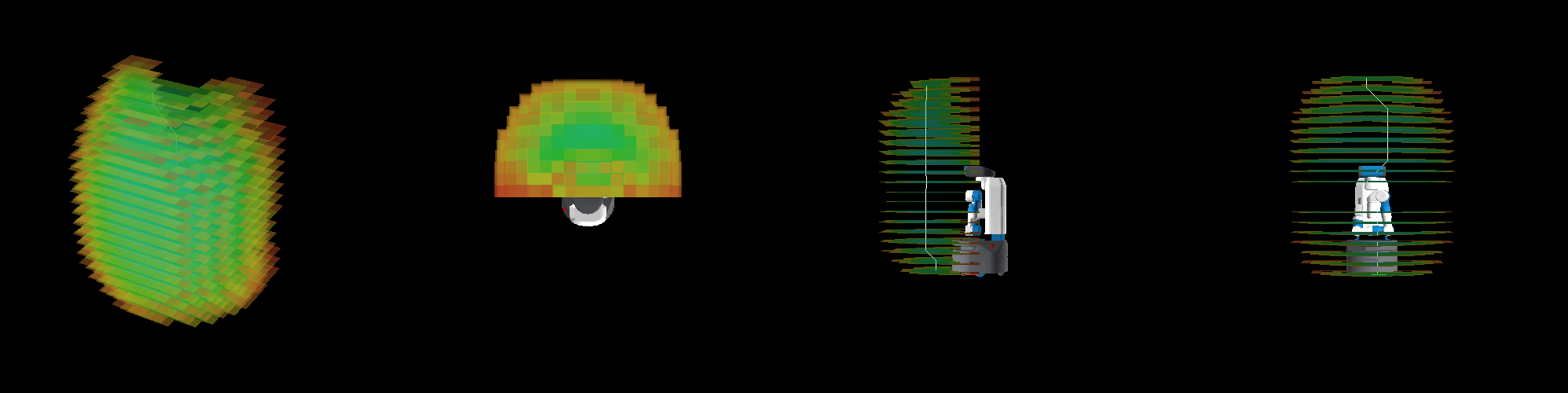
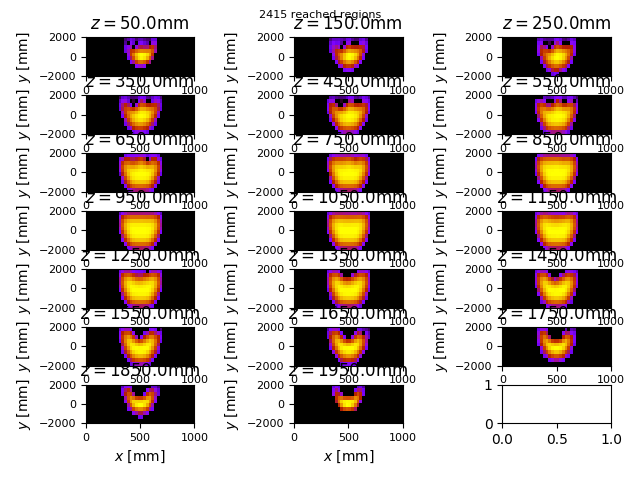
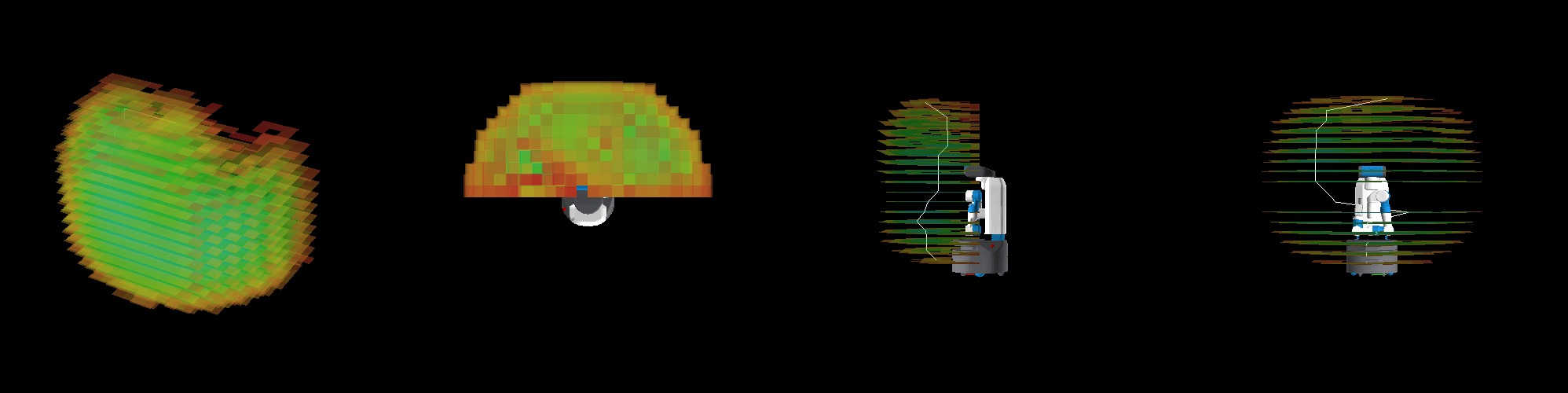
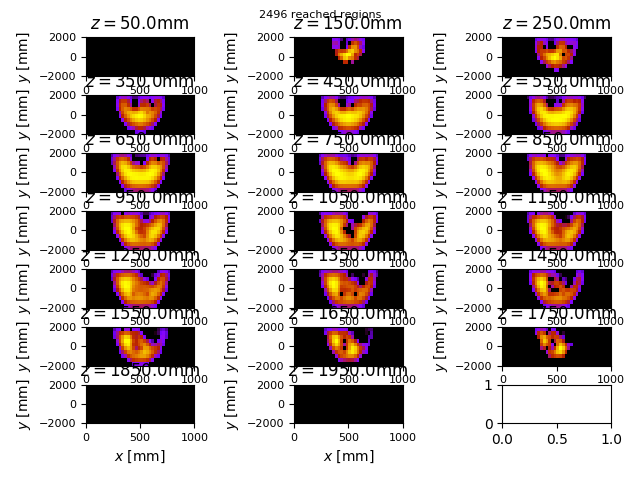
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
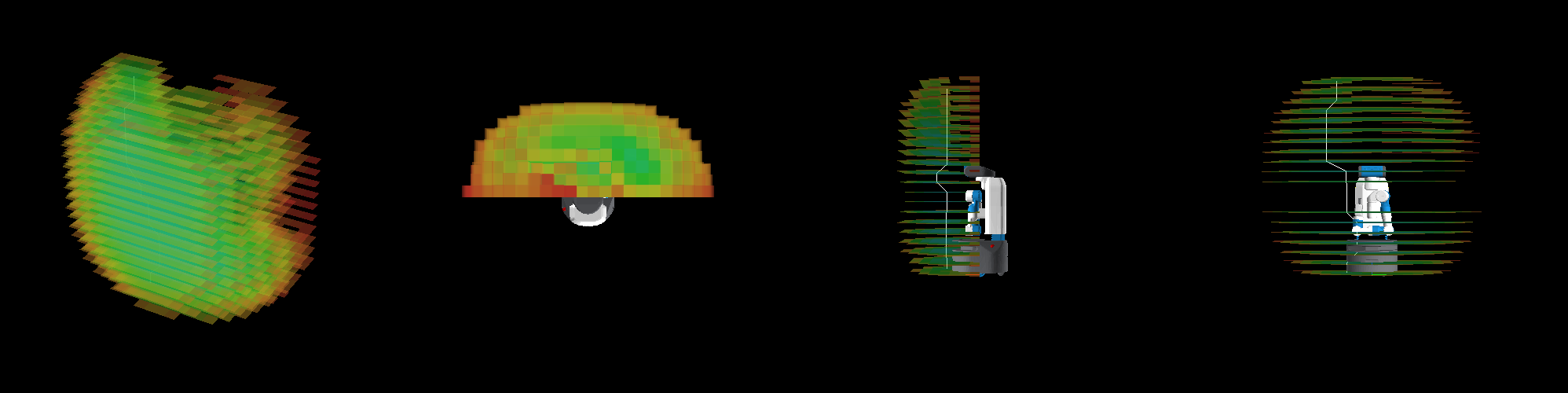
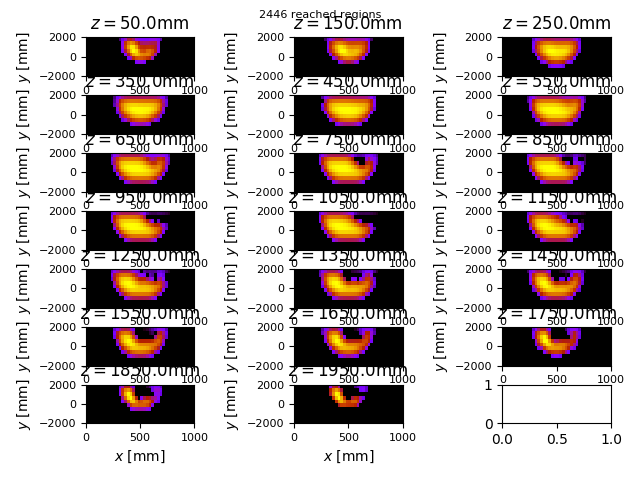
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control | |
| drc_task_common |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]
Messages
Services
Plugins
Recent questions tagged jsk_ik_server at Robotics Stack Exchange
|
|
jsk_ik_server package from jsk_control repocmd_vel_smoother contact_states_observer eus_nlopt eus_qp eus_qpoases eus_teleop joy_mouse jsk_calibration jsk_control jsk_footstep_controller jsk_footstep_planner jsk_ik_server jsk_teleop_joy |
ROS Distro
|
Package Summary
| Version | 0.1.18 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-09-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
jsk_ik_server
IK reachability map
How to use
roscd jsk_ik_server
cd scripts/ik-grid
# bash <robot name>.sh
bash pr2.sh
PR2 IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Jaxon IK Evaluation
For more detailed infomation. please read docs/jaxon_ik_evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
TABLIS IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Fetch IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Baxter IK Evaluation
X-up IK reachability with :rotation-axis :z
Y-up IK reachability with :rotation-axis :z
Z-up IK reachability with :rotation-axis :z
Changelog for package jsk_ik_server
0.1.18 (2024-12-09)
0.1.17 (2023-05-28)
0.1.16 (2022-10-27)
- [jsk_ik_server] add TABLIS reachability map (#777)
- https://projects.coin-or.org have mved to github (#776)
- [jsk_ik_server] add fetch ik reachability map script (#769)
- avoid zero division ik ik-evaluation.l (#767)
- [jsk_ik_server] add baxter reachability map script
(#771)
- add baxter ik reachability map images in readme
- add fetch ik reachability map in readme
- add baxter reachability map
- fix for test
(#773)
- indigo requres to add find_pacakge(roseus) to compile roseus message
- remove roseus from find_package(catkin at jsk_footstep_planner and jsk_ik_server
- [jsk_ik_server] fix typo in hrp2.sh and pr2.sh (#768)
- [jsk_ik_server] add readme for jsk_ik_server (#772)
- 2to3 -w -fprint . (#763)
- Contributors: Kei Okada, Shingo Kitagawa
0.1.15 (2018-05-16)
0.1.14 (2018-01-15)
0.1.13 (2017-04-18)
0.1.12 (2017-02-22)
0.1.11 (2017-02-09)
0.1.10 (2016-12-15)
- Add centroid method to ik-grid
(#636)
- [wholebody_manipulation_planner] add :centroid method to ik-gird.
- [jsk_ik_server/euslisp/ik-evaluation.l] fix indent.
- [jsk_ik_server/euslisp/ik-evaluation.l] add fullbody and initial-pose arguments to ik-evaluation. (#602)
- [jsk_ik_server/euslisp] extend IK grid function
(#576)
- [jsk_ik_server/euslisp/ik-evaluation.l] add move-target and orient-centerp arguments to ik-evaluation function.
- [jsk_ik_server/euslisp/ik-evaluation.l] add :insidep method to ik-grid class.
- [jsk_ik_server/euslisp/ik-evaluation.l] save cube instance in :cube method.
- Contributors: Masaki Murooka
0.1.9 (2016-03-23)
0.1.8 (2015-11-02)
0.1.7 (2015-11-01)
- [jsk_ik_server] Remove grids which are too near to robot in stand location planning
- [jsk_ik_server] Add script to generate reachability images for pr2 and hrp2
- [jsk_ik_server] Implement Brute-force stand location search.
- [jsk_ik_server] Implement stand location planning with taking into account range of targets
- [jsk_ik_server] Visualize ik-grid by irtviewer
- [jsk_ik_server] Implement stand location planning based on continuous ik grid. Currently only position and mean of pdf is taken into account
- [jsk_ik_server] Fix jaxon_ik_evaluation.md to render properly on github
- [jsk_ik_server] Add markdown to visualize ik-grid evaluate
- [jsk_ik_server] Pretty-printing of progress of generating ik grid like min-max table generation
- [jsk_ik_server/plot_ik_grid.py] Add second argumment to save image file instad of showing plot on GUI
- [jsk_ik_server] Script to visualize reachability in heatmap manner
- [jsk_ik_server] Add ik-evaluation.l to evaluate spacial ik quarity
- Remove manifest.xml and Makefile and use catkin style filesystem
- Contributors: Ryohei Ueda
0.1.6 (2015-06-11)
- add files for jaxonred
- add jaxon to ik_server
- change order in find_pkg
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roseus | |
| tf | |
| moveit_msgs | |
| rostest | |
| cmake_modules | |
| mk | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_control |
Launch files
- launch/hrp2jsknt-ik-server.launch
- launch/hrp2jsknts-ik-server.launch
- launch/jaxon-ik-server.launch
- launch/jaxon_red-ik-server.launch
- launch/staro-ik-server.launch
- sample/teleop/robot-controller-sample.launch
-
- CONTROL_ROBOT [default: staro]
- USE_JOY [default: false]
- DEV [default: /dev/input/js1]
- test/all-test.launch
-
- IK_CLIENT_TEST_WITH_LEG [default: False]
- test/atlas-ik-server-test.launch
- test/hrp2jsk-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/hrp2jsknt-ik-server-test.launch
- test/hrp2jsknts-ik-server-test.launch
- test/jaxon-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/jaxon_red-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/pr2-ik-server-test.launch
- test/samplerobot-ik-server-test.launch
-
- IK_OPTIONS [default: ]
- test/staro-ik-server-test.launch
-
- IK_OPTIONS [default: ]