
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
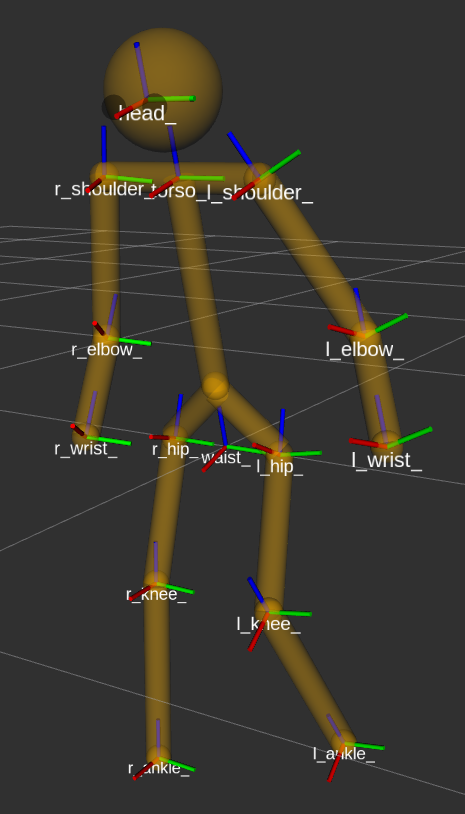
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
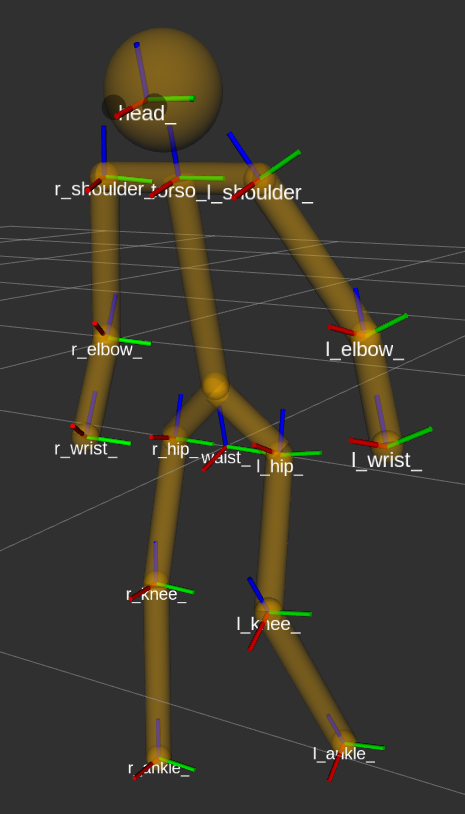
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 2.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Part of the ROS4HRI project.
Testing
Install the package, and launch ros2 launch human_description show.launch.py.
This will display the human model, as well as a GUI to control the human joint
state (you might need to install joint_state_publisher_gui on your system if
not yet available).
The script script/create_human_urdf.py can also be used to generate a URDF
model from the template, showcasing the different parameters that can be
configured.
Changelog for package human_description
2.0.2 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- Contributors: lorenzoferrini
2.0.1 (2023-11-13)
- port to ROS2 humble
- Contributors: Séverin Lemaignan
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| xacro | |
| launch | |
| launch_ros | |
| launch_pal | |
| launch_param_builder | |
| ament_lint_auto | |
| ament_lint_common | |
| launch_testing_ament_cmake | |
| urdf_test | |
| robot_state_publisher |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 1.0.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Testing
Install the package, and launch roslaunch human_description visualize.launch.
In rviz, change the default frame to eg body_default and add a Robot model
visualizer to see the human model.
Changelog for package human_description
1.0.1 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- add BSD LICENSE file
- Contributors: Séverin Lemaignan, lorenzoferrini
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan
Launch files
Messages
Services
Plugins
Recent questions tagged human_description at Robotics Stack Exchange
|
|
human_description package from human_description repohuman_description |
ROS Distro
|
Package Summary
| Version | 1.0.1 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros4hri/human_description.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-02-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Séverin Lemaignan
Authors
- Séverin Lemaignan
human_description
Parametric kinematic model of humans, in URDF format, for usage in robotics and HRI
Testing
Install the package, and launch roslaunch human_description visualize.launch.
In rviz, change the default frame to eg body_default and add a Robot model
visualizer to see the human model.
Changelog for package human_description
1.0.1 (2024-02-05)
- fix joint limits for the arms the joint limits for the arms were wrong, as they did not really reflect the range of movements a human is able to perform. This commit introduces realistic joint limits for human arms.
- add BSD LICENSE file
- Contributors: Séverin Lemaignan, lorenzoferrini
1.0.0 (2022-01-13)
- v1 of the human URDF model
- Initial commit
- Contributors: Séverin Lemaignan