
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | BSD |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2024-10-10 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Wolfgang Merkt
Authors
HPP-FCL — An extension of the Flexible Collision Library




![]()
![]()
FCL was forked in 2015. Since then, a large part of the code has been rewritten or removed (for the unused and untested part). The broad phase was reintroduced by Justin Carpentier in 2022 based on the FCL version 0.7.0.
If you use HPP-FCL in your projects and research papers, we would appreciate it if you’d cite it.
New features
Compared to the original FCL library, the main new features are:
- a dedicated and efficient implementation of the GJK algorithm (we do not rely anymore on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performances (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
This project is now used in many robotics frameworks such as Pinocchio, an open-source software that implements efficient and versatile rigid body dynamics algorithms, the Humanoid Path Planner, an open-source software for Motion and Manipulation Planning. HPP-FCL has also been recently used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
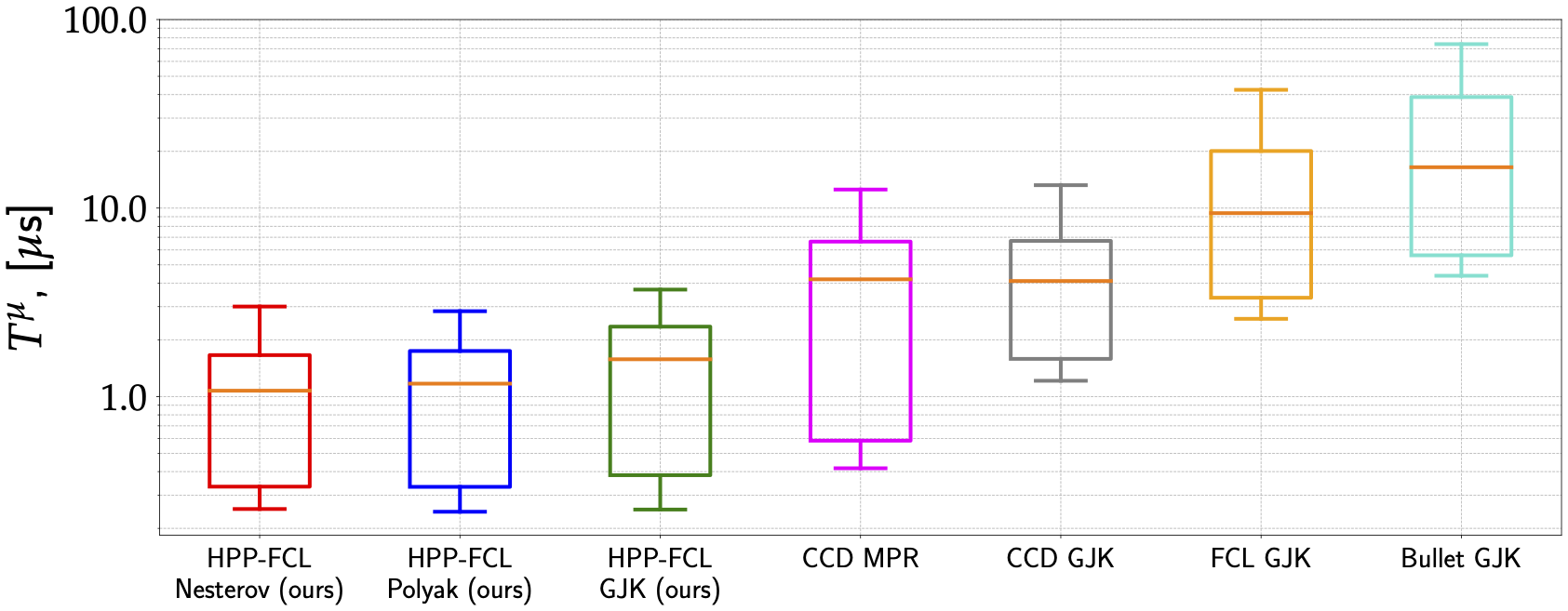
Unlike the original FCL library, HPP-FCL implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performances, as depicted by the figures below.
On the one hand, we have benchmarked HPP-FCL against major software alternatives of the state of the art:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why.
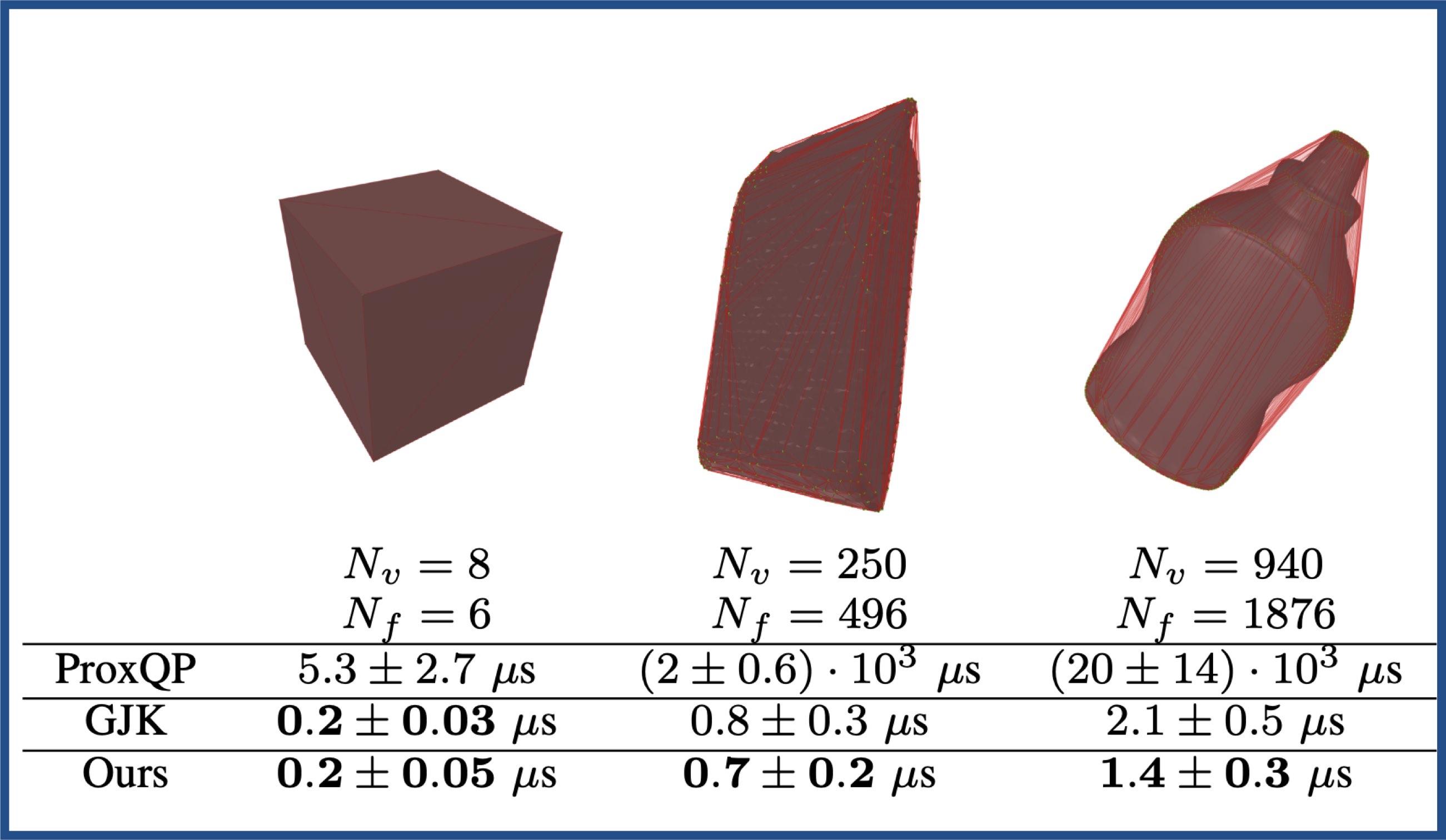
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Pinocchio
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install hpp-fcl.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using HPP-FCL in C++:
#include "hpp/fcl/math/transform.h"
#include "hpp/fcl/mesh_loader/loader.h"
#include "hpp/fcl/BVH/BVH_model.h"
#include "hpp/fcl/collision.h"
#include "hpp/fcl/collision_data.h"
#include <iostream>
#include <memory>
// Function to load a convex mesh from a `.obj`, `.stl` or `.dae` file.
//
// This function imports the object inside the file as a BVHModel, i.e. a point cloud
// which is hierarchically transformed into a tree of bounding volumes.
// The leaves of this tree are the individual points of the point cloud
// stored in the `.obj` file.
// This BVH can then be used for collision detection.
//
// For better computational efficiency, we sometimes prefer to work with
// the convex hull of the point cloud. This insures that the underlying object
// is convex and thus very fast collision detection algorithms such as
// GJK or EPA can be called with this object.
// Consequently, after creating the BVH structure from the point cloud, this function
// also computes its convex hull.
std::shared_ptr<hpp::fcl::ConvexBase> loadConvexMesh(const std::string& file_name) {
hpp::fcl::NODE_TYPE bv_type = hpp::fcl::BV_AABB;
hpp::fcl::MeshLoader loader(bv_type);
hpp::fcl::BVHModelPtr_t bvh = loader.load(file_name);
bvh->buildConvexHull(true, "Qt");
return bvh->convex;
}
int main() {
// Create the hppfcl shapes.
// Hppfcl supports many primitive shapes: boxes, spheres, capsules, cylinders, ellipsoids, cones, planes,
// halfspace and convex meshes (i.e. convex hulls of clouds of points).
// It also supports BVHs (bounding volumes hierarchies), height-fields and octrees.
std::shared_ptr<hpp::fcl::Ellipsoid> shape1 = std::make_shared<hpp::fcl::Ellipsoid>(0.7, 1.0, 0.8);
std::shared_ptr<hpp::fcl::ConvexBase> shape2 = loadConvexMesh("../path/to/mesh/file.obj");
// Define the shapes' placement in 3D space
hpp::fcl::Transform3f T1;
T1.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T1.setTranslation(hpp::fcl::Vec3f::Random());
hpp::fcl::Transform3f T2 = hpp::fcl::Transform3f::Identity();
T2.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T2.setTranslation(hpp::fcl::Vec3f::Random());
// Define collision requests and results.
//
// The collision request allows to set parameters for the collision pair.
// For example, we can set a positive or negative security margin.
// If the distance between the shapes is less than the security margin, the shapes
// will be considered in collision.
// Setting a positive security margin can be usefull in motion planning,
// i.e to prevent shapes from getting too close to one another.
// In physics simulation, allowing a negative security margin may be usefull to stabilize the simulation.
hpp::fcl::CollisionRequest col_req;
col_req.security_margin = 1e-1;
// A collision result stores the result of the collision test (signed distance between the shapes,
// witness points location, normal etc.)
hpp::fcl::CollisionResult col_res;
// Collision call
hpp::fcl::collide(shape1.get(), T1, shape2.get(), T2, col_req, col_res);
// We can access the collision result once it has been populated
std::cout << "Collision? " << col_res.isCollision() << "\n";
if (col_res.isCollision()) {
hpp::fcl::Contact contact = col_res.getContact(0);
// The penetration depth does **not** take into account the security margin.
// Consequently, the penetration depth is the true signed distance which separates the shapes.
// To have the distance which takes into account the security margin, we can simply add the two together.
std::cout << "Penetration depth: " << contact.penetration_depth << "\n";
std::cout << "Distance between the shapes including the security margin: " << contact.penetration_depth + col_req.security_margin << "\n";
std::cout << "Witness point on shape1: " << contact.nearest_points[0].transpose() << "\n";
std::cout << "Witness point on shape2: " << contact.nearest_points[1].transpose() << "\n";
std::cout << "Normal: " << contact.normal.transpose() << "\n";
}
// Before calling another collision test, it is important to clear the previous results stored in the collision result.
col_res.clear();
return 0;
}
Python example
Here is the C++ example from above translated in python using HPP-FCL’s python bindings:
import numpy as np
import hppfcl
# Optional:
# The Pinocchio library is a rigid body algorithms library and has a handy SE3 module.
# It can be installed as simply as `conda -c conda-forge install pinocchio`.
# Installing pinocchio also installs hpp-fcl.
import pinocchio as pin
def loadConvexMesh(file_name: str):
loader = hppfcl.MeshLoader()
bvh: hppfcl.BVHModelBase = loader.load(file_name)
bvh.buildConvexHull(True, "Qt")
return bvh.convex
if __name__ == "__main__":
# Create hppfcl shapes
shape1 = hppfcl.Ellipsoid(0.7, 1.0, 0.8)
shape2 = loadConvexMesh("../path/to/mesh/file.obj")
# Define the shapes' placement in 3D space
T1 = hppfcl.Transform3f()
T1.setTranslation(pin.SE3.Random().translation)
T1.setRotation(pin.SE3.Random().rotation)
T2 = hppfcl.Transform3f();
# Using np arrays also works
T1.setTranslation(np.random.rand(3))
T2.setRotation(pin.SE3.Random().rotation)
# Define collision requests and results
col_req = hppfcl.CollisionRequest()
col_res = hppfcl.CollisionResult()
# Collision call
hppfcl.collide(shape1, T1, shape2, T2, col_req, col_res)
# Accessing the collision result once it has been populated
print("Is collision? ", {col_res.isCollision()})
if col_res.isCollision():
contact: hppfcl.Contact = col_res.getContact(0)
print("Penetration depth: ", contact.penetration_depth)
print("Distance between the shapes including the security margin: ", contact.penetration_depth + col_req.security_margin)
print("Witness point shape1: ", contact.getNearestPoint1())
print("Witness point shape2: ", contact.getNearestPoint2())
print("Normal: ", contact.normal)
# Before running another collision call, it is important to clear the old one
col_res.clear()
Acknowledgments
The development of HPP-FCL is actively supported by the Gepetto team @LAAS-CNRS, the Willow team @INRIA and, to some extend, Eureka Robotics.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Added
Transform3f::RandomandTransform3f::setRandom(#584) - New feature: computation of contact surfaces for any pair of primitive shapes (triangle, sphere, ellipsoid, plane, halfspace, cone, capsule, cylinder, convex) (#574).
- Enhance Broadphase DynamicAABBTree to better handle planes and halfspace (#570)
-
#558:
- [internal] Removed dead code in
narrowphase/details.h(#558) - [internal] Removed specializations of methods of
GJKSolver. Now the specializations are all handled byShapeShapeDistanceinshape_shape_func.h. - [new feature] Added support for Swept-Sphere primitives (sphere, box, capsule, cone, ellipsoid, triangle, halfspace, plane, convex mesh).
- [internal] Removed dead code in
- [API change] Renamed default convergence criterion from
VDBtoDefault(#556) - Fixed EPA returning nans on cases where it could return an estimate of the normal and penetration depth. (#556)
- Fixed too low tolerance in GJK/EPA asserts (#554)
- Fixed
normal_and_nearest_pointstest (no need to have Eigen 3.4) (#553) - #549
- Optimize EPA: ignore useless faces in EPA’s polytope; warm-start support computation for
Convex; fix edge-cases witness points computation. - Add
Serializabletrait to transform, collision data, collision geometries, bounding volumes, bvh models, hfields. Collision problems can now be serialized from C++ and sent to python and vice versa. - CMake: allow use of installed jrl-cmakemodules (#564)
- Python: add id() support for geometries (#618).
Fixed
- Fix Fix serialization unit test when running without Qhull support (#611)
- Compiler warnings (#601, #605)
- CMake: fix assimp finder
- Don’t define GCC7 Boost serialization hack when
HPP_FCL_SKIP_EIGEN_BOOST_SERIALIZATIONis defined (#530) - Default parameters for narrowphase algorithms (GJK and EPA); fixed assertion checks that were sometimes failing in GJK simplex projection and BVH
collide(#531). - Created a new macro
HPP_FCL_ASSERTwhich behaves as an assert by default. When the optionHPP_FCL_TURN_ASSERT_INTO_EXCEPTIONis turned on, it replaces the macro by an exception (#533). Also fixed an EPA assert inGJKSolver. - Simplify internals of hpp-fcl (#535):
- Computing distance between 2 primitives shapes does not use a traversal node anymore.
- Removed successive mallocs in GJK/EPA when using an instance of
GJKSolvermultiple times. -
GJKSolvernow deals with all statuses of GJK/EPA. Some of these statuses represent a bad behavior of GJK/EPA and now trigger an assertion in Debug mode. Usefull for debugging these algos. - Logging was added with macros like
HPP_FCL_LOG_(INFO/DEBUG/WARNING/ERROR); hpp-fcl can now log usefull info when the preprocessor optionHPP_FCL_ENABLE_LOGGINGis enabled. - Deprecated
enable_distance_lower_boundinCollisionRequest; a lower bound on distance is always computed. - Deprecated
enable_nearest_pointsinDistanceRequest; they are always computed and are the points of the shapes that achieve a distance ofDistanceResult::min_distance. - Added
enable_signed_distanceflag inDistanceRequest(defaulttrue). Turn this of for better performance if only the distance when objects are disjoint is needed. - The internal collision and distance functions of hpp-fcl now use
CollisionRequest::enable_contactandDistanceRequest::enable_signed_distanceto control whether or not penetration information should be computed. There are many scenarios where we don’t need the penetration information and only want to know if objects are colliding and compute their distance only if they are disjoint. These flags allow the user to control the trade-off between performance vs. information of the library. - Fix convergence criterion of EPA; made GJK and EPA convergence criterion absolute + relative to scale to the shapes’ dimensions; remove max face/vertices fields from EPA (these can be deduced from the max number of iterations)
- Account for lateral borders in Height Fields model.
- Fix compilation error on recent APPLE compilers (#539).
- Fix printing of deprecated message (#540).
- Fix compilation with earlier Eigen version
- Fix compilation warning message
- Fix issue in Octomap.computeLocalAABB
- Fix unsupported function for contact_patch_matrix
- Fix Octomap dependency on ROS
2.4.5 - 2024-07-28
Fixed
- Fix Octomap dependency on ROS
2.4.4 - 2024-03-06
2.4.3 - 2024-03-06
Fixed
- updated cmake module to fix documentation generation
- test documentation in conda ci
2.4.2 - 2024-03-06
Fixed
- Fix CMAKE_INSTALL_{} path for installation (#543)
2.4.1 - 2024-01-23
Fixed
- CachedMeshLoader checks file last modification time.
- Fix call to clear methods for {Collision,Distance}Data inside init function (#509)
- CMake: fix submodule use in bindings in (#512)
- Fix bug in DynamicAABBTreeCollisionManager (see #514) in (#515)
Added
- In struct Contact
- Documentation of the members,
- initialization of normal, closest points and contact point in constructors
- method getDistanceToCollision
- New variant of GJK (PolyakAcceleration).
- Specialization of distance computation between
- Sphere and Capsule,
- Ellipsoid and Halfspace,
- Ellipsoid and Plane.
- Collision computation between Octree and HeightField.
Changed
- Matrixx3f and Matrixx3i become row major.
- Use shared pointers to vectors instead of arrays for vertices and triangles in class BVHModelBase.
Removed
- members related epa in class QueryRequest
2.4.0 - 2023-11-27
Added
- Add method to
CollisionObjectto getCollisionGeometryraw pointer
Fixed
- Fix RPATH computation on OSX
- Fix Python stubs generation on Windows
2.3.7 - 2023-11-15
What’s Changed
2.3.6 - 2023-09-30
What’s Changed
- Update ROS_DISTRO by @jcarpent (#442)
- Add citations by @jcarpent (#449)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#444)
- [WIP] Debug by @jcarpent (#455)
- CMake: require >= 3.10 by @nim65s (#453)
- core: fix SaPCollisionManager::empty() by @rujialiu (#454)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#452)
New Contributors
2.3.5 - 2023-07-11
What’s Changed
- Fix compilation warning by @jcarpent (#434)
- Fix parsing of doxygen doc by @jcarpent (#439)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#438)
2.3.4 - 2023-06-01
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#414)
- Fix conversion warning by @wxmerkt (#417)
- Add missing boost include by @nim65s (#418)
- ci: update macos-linux-pip by @nim65s (#419)
- Modernize Cmake use by @nim65s (#420)
- tests: use boost::filesystem by @nim65s (#424)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#425)
- Update minimal Python version by @jcarpent (#427)
- Sync submodule cmake by @jcarpent (#430)
- Sync submodule CMake by @jcarpent (#431)
2.3.3 - 2023-05-09
What’s Changed
2.3.2 - 2023-04-27
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#391)
- Sync submodule cmake by @jcarpent (#393)
- Topic/rpath by @nim65s (#394)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#396)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#399)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#402)
- Sync submodule cmake by @jcarpent (#406)
2.3.1 - 2023-03-25
What’s Changed
- Remove useless call to /proc/cpuinfo by @jcarpent (#385)
- Add pip CI by @nim65s (#386)
- [GJKSolver] Fix missing switch case in result status of GJK by @lmontaut (#387)
- Sync submodule cmake by @jcarpent (#388)
2.3.0 - 2023-03-17
What’s Changed
- [CI] Remove EOL Galactic by @wxmerkt (#366)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#367)
- Sync submodule cmake by @jcarpent (#368)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#369)
- Adding EarlyStopped flag in GJK by @lmontaut (#371)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#373)
- Update CI by @jcarpent (#374)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#375)
- Skip test if BUILD_TESTING is OFF by @jcarpent (#378)
2.2.0 - 2022-12-12
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#358)
- Extract checks if AABB overlap by @jmirabel (#360)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#361)
- Sync submodule CMake by @jcarpent (#362)
- Add support of Pickling by @jcarpent (#363)
2.1.4 - 2022-10-24
What’s Changed
- Sync submodule CMake by @jcarpent (#352)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#353)
2.1.3 - 2022-09-13
What’s Changed
- Minor boost cleanup by @pantor (#331)
- [CI] Activate ROS2 configurations by @wxmerkt (#332)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#337)
- Sync submodule cmake by @jcarpent (#341)
- Fix shapeIntersect when for EPA FallBack by @jcarpent (#342)
- Fix findAssimp on Windows by @jcarpent (#345)
- Sync submodule cmake by @jcarpent (#347)
New Contributors
2.1.2 - 2022-08-01
What’s Changed
- core: add EPA::FallBack condition to shapeDistance computation by @lmontaut (#325)
- CMake: update to eigenpy 2.7.10 by @nim65s (#327)
2.1.1 - 2022-07-25
What’s Changed
- cmake: relocatable package for recent CMake versions by @nim65s (#319)
- ROS2/Colcon integration by @wxmerkt (#321)
2.1.0 - 2022-07-13
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#288)
- Add enum helpers by @jcarpent (#290)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#294)
- Ellipsoids in collision & distance matrices by @lmontaut (#295)
- doc: simplex projection in GJK class. by @lmontaut (#296)
- Feature: Nesterov acceleration for GJK by @lmontaut (#289)
- Add more testing to broadphase by @jcarpent (#298)
- Feature: adding convergence criterions for GJK algorithm by @lmontaut (#299)
- Sync submodule cmake by @jcarpent (#300)
- Reorder triangles when computing convex hulls by @lmontaut (#301)
- Exposing gjk utils by @lmontaut (#302)
- Fix assert precision in GJK by @jcarpent (#304)
- Simplify GJKSolver settings by @jcarpent (#305)
- Add CollisionResult::nearest_points by @jcarpent (#303)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#306)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#309)
- Fix minimal value for GJK::distance_upper_bound by @jcarpent (#310)
- Fix incoherent overlap by @jcarpent (#311)
- Expose shared_ptr
by [@Jiayuan-Gu](https://github.com/Jiayuan-Gu) ([#314](https://github.com/humanoid-path-planner/hpp-fcl/pull/314)) - test/gjk_convergence_criterion: Add check on GJK::Status by @wxmerkt (#315)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#316)
- Handle negative security margin by @jcarpent (#312)
New Contributors
- @Jiayuan-Gu made their first contribution (#314)
2.0.1 - 2022-04-15
This PR mainly fixes packaging issues and removes compilation warnings.
What’s Changed
- Zero warnings by @wxmerkt (#282)
- Sync submodule cmake by @jcarpent (#283)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#284)
- Activate python3-pylatexenc dependency by @wxmerkt (#286)
- Comment pylatexenc again since it’s not available on the buildfarm by @wxmerkt (#287)
New Contributors
- @pre-commit-ci made their first contribution (#284)
2.0.0 - 2022-04-06
This new release reintroduces the full support of Broad phase within hpp-fcl while also enforcing C++11 as minimal standard.
What’s Changed
- Add Ellipsoid by @jcarpent (#259)
- Removing comment about inflation. by @lmontaut (#261)
- Reintroduce broadphase by @jcarpent (#260)
- Simplify CollisionObject by removing cgeom_const by @jcarpent (#263)
- Address some warnings by @wxmerkt (#262)
- Fix missing copy of aabb_local in CollisionGeometry by @jcarpent (#264)
- use std::shared_ptr, fix #218 by @nim65s (#266)
- Fix broadphase warnings for clang (some conversion remain for g++) by @wxmerkt (#268)
- [ComputeCollision] Return no collision if security_margin is set to -inf by @florent-lamiraux (#271)
- tests: remove link to boost unit test framework by @nim65s (#270)
- Fix computation of aabb_center by @jcarpent (#273)
- Add operator== and operator!= to CollisionGeometry by @jcarpent (#274)
- Merge pull request #276 from humanoid-path-planner/patch-release-1.8.1 by @jcarpent (#277)
- Fix some missing features in base classes by @jcarpent (#275)
- Add operator{==,!=} to CollisionObject by @jcarpent (#278)
- Configure and apply pre-commit by @jcarpent (#280)
- Fix DistanceCallBackBaseWrapper by @jcarpent (#281)
New Contributors
1.8.1 - 2022-03-20
What’s Changed
1.8.0 - 2022-02-08
What’s Changed
- [CMake] Qhull is a private dependency by @nim65s (#247)
- Remove useless warnings by @jcarpent (#248)
- fix submodule url by @nim65s (#246)
- Remove warnings and add missing noalias by @jcarpent (#249)
- Function makeOctree returns a shared pointer by @florent-lamiraux (#254)
- Add support of HeightField by @jcarpent (#251)
- [OcTree] Add method to save octree in obj file. by @florent-lamiraux (#256)
- Fix C++98 compatibility by @jcarpent (#258)
1.7.8 - 2021-10-30
What’s Changed
- Fix conversion by @jcarpent (#242)
- Fix exposition of vertices by @jcarpent (#243)
- Enhance Convex exposition by @jcarpent (#244)
- Sync submodule cmake by @jcarpent (#245)
1.7.7 - 2021-09-13
This new release fixes several bugs within the framework.
1.7.6 - 2021-09-08
This new release improves the packaging of the project and integrates the Stub generation of Python bindings.
1.7.5 - 2021-07-30
This new release provides extended API exposition in Python, removes some code related to CDD while also trying to rely on the QHULL version present on the system.
1.7.4 - 2021-06-11
This release fixes several bugs:
- correct update of the distance lower bound
- fix memory footprint computation
while also removing the support of Travis CI.
1.7.3 - 2021-05-26
This new release provides:
- fixes of LINE and POINTS when loading meshes with assimp
- removing of various warnings
- computation of memory footprint for geometries
1.7.2 - 2021-04-19
This new release improves the loading of meshes using Assimp by automatically removing degenerated LINES and POINTS.
1.7.1 - 2021-04-02
This new release reduces the impact of timers on the computations. This should be used with care and can be enabled by setting the correct flag to true in the QueryRequest.
1.7.0 - 2021-03-31
This new release provides:
- extended support for serialization
- timing of the collision/distance computations
- helpers to build octree
- various bug fixes and interface improvements
1.6.0 - 2020-10-06
This new release provides:
- functors for evaluating Collision and Distances (faster call)
- extended support of v142 compiler
- support of collision check between HalfSpace and Convex shapes
- improvement of GJK solver
- fixes on Python bindings
1.5.4 - 2020-09-22
In this new release, the support of collision checking between Convex objects and HalfSpace have been enhanced and some minor fixes have been provided.
1.5.3 - 2020-08-31
This new release provides better CMake packaging and improved GJK algorithms.
1.5.2 - 2020-08-15
This release improves the packaging of the project and provides fixes for the GJK solver.
1.5.1 - 2020-08-06
This new release fixes packaging issues with precedent release 1.5.0. It also provides additional fixes in main collision/distance algorithms.
1.4.6 - 2020-06-10
This new release enhances the packaging of the project and allows the compilation of FCL on Windows systems.
1.4.5 - 2020-06-03
Changes in v1.4.5:
- Fix Python 3 doc generation
- Fix packaging of the project
- Compilation on Windows.
- [CMake] Install missing header.
- Add collide and distance prototype that update the GJK guess.
- Add support function cached guess in queries and merge query attribute.
- Add function to generate the convex hull.
- Add hint to the support function + Fix usage of GJK guess.
- [Python] Add constructor for class Convex.
- [Python] Bind functions to create BVHModel.
1.4.4 - 2020-04-29
Changes in 1.4.4:
- add MeshLoader::loadOctree
- fix generation of XML documentation
- fix generation of Doxygen documentation
1.4.3 - 2020-04-08
This new release fixes some packagings issues for OS X systems.
1.4.2 - 2020-04-04
Changes in v1.4.2:
- don’t require linking to eigenpy in .pc file.
1.4.1 - 2020-04-03
Changes in v1.4.1:
- Bug fix + prepare optimization of collision using GJK / EPA
- Add missing constructor for Transform3f
1.4.0 - 2020-04-03
Changes since v1.3.0:
- Improve code efficiency + use shared memory between Numpy and Eigen
- [Python] Doc and minor update + [C++] bugfix
- [Python] Fix bindings of CollisionResult.
- FIX: throw when no contact is available
- Minor fix and computational improvments
- [GJK/EPA] Fix bugs + Treat sphere as point and capsule as line segment.
- Fix boxSphereDistance
- Provide documentation for the Python bindings.
- Generate Python documentation from doxygen documentation.
- Fix issue when Python_EXECUTABLE is not defined
- update CMake packaging
1.3.0 - 2020-01-28
This new release comes with:
- the removing of the GJK solver
- the Python bindings build by default
- an improved documentation
- additional Python bindings
1.2.2 - 2019-12-17
This new Release improves the Python bindings and fixes an important bug when checking the collision between two Capsules.
Thanks to @rstrudel for this fix.
1.2.1 - 2019-12-09
This new release improves both the packaging of the project, which seems to be totally compatible with the new CMake linkage style. In addition, the bindings are now fully compatible with Pinocchio.
1.2.0 - 2019-11-22
Changes since v1.1.3:
- Add python bindings
- Update CMake
- Add version support
- New folder Internal for internal header
- Travis: update CI & change policy to only perform build in DEBUG mode on Bionic
- assimp: fix issue with recent version of assimp
- [bindings] [CMakeLists] Use .so for Mac and .pyd for Windows, fix #86
- Organize documentation
- [CMake] fix octomap detection
- [Minor] update CMake module + fix visibility of some methods.
- Enable Convex / Convex queries + Add Python bindings.
- Fix unit-tests and compilation
- [GJK] Fix GJK::encloseOrigin (fixes unit-tests)
- Improve GJK implementation + OBB overlap test + bug fixes
- Clean include BV/BVH/math/mesh_loader
1.1.3 - 2019-08-07
This new release enhances the compatibility of hpp-fcl with C++14 and more. This feature is requested for integration in Anaconda.
1.1.2 - 2019-08-05
This new release provides a fix in the parallelization of the computations and improves the packaging of the whole project.
1.0.2 - 2019-04-24
Changes since v1.0.1:
- obb: fix compatibility with Eigen 3.0.5
- [CI] octomap for osx
1.0.1 - 2019-02-20
- Fix CI on OSX
- Declare CachedMeshLoader::Key::operator<
- minor details
0.7.0 - 2019-01-31
This release is mainly here to allow the packaging of HPP-RBPRM. Another release will follow with more news.
0.6.0 - 2018-10-22
- Fix bug when OCTOMAP is not found
- move buildTrianglePlane and clipTriangle method from private to public
- Fix bug with “" symbols
- [CMake] Add flags related to Octomap in pkg-config file and remove FCL_HAVE_EIGEN
0.5.1 - 2017-10-02
Now Eigen is at the heart of linear algebra computations.
0.5 - 2017-03-17
First release
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged hpp-fcl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | BSD |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2024-10-10 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Wolfgang Merkt
Authors
HPP-FCL — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015. Since then, a large part of the code has been rewritten or removed (for the unused and untested part). The broad phase was reintroduced by Justin Carpentier in 2022 based on the FCL version 0.7.0.
If you use HPP-FCL in your projects and research papers, we would appreciate it if you’d cite it.
New features
Compared to the original FCL library, the main new features are:
- a dedicated and efficient implementation of the GJK algorithm (we do not rely anymore on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performances (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
This project is now used in many robotics frameworks such as Pinocchio, an open-source software that implements efficient and versatile rigid body dynamics algorithms, the Humanoid Path Planner, an open-source software for Motion and Manipulation Planning. HPP-FCL has also been recently used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, HPP-FCL implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performances, as depicted by the figures below.
On the one hand, we have benchmarked HPP-FCL against major software alternatives of the state of the art:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why.
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Pinocchio
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install hpp-fcl.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using HPP-FCL in C++:
#include "hpp/fcl/math/transform.h"
#include "hpp/fcl/mesh_loader/loader.h"
#include "hpp/fcl/BVH/BVH_model.h"
#include "hpp/fcl/collision.h"
#include "hpp/fcl/collision_data.h"
#include <iostream>
#include <memory>
// Function to load a convex mesh from a `.obj`, `.stl` or `.dae` file.
//
// This function imports the object inside the file as a BVHModel, i.e. a point cloud
// which is hierarchically transformed into a tree of bounding volumes.
// The leaves of this tree are the individual points of the point cloud
// stored in the `.obj` file.
// This BVH can then be used for collision detection.
//
// For better computational efficiency, we sometimes prefer to work with
// the convex hull of the point cloud. This insures that the underlying object
// is convex and thus very fast collision detection algorithms such as
// GJK or EPA can be called with this object.
// Consequently, after creating the BVH structure from the point cloud, this function
// also computes its convex hull.
std::shared_ptr<hpp::fcl::ConvexBase> loadConvexMesh(const std::string& file_name) {
hpp::fcl::NODE_TYPE bv_type = hpp::fcl::BV_AABB;
hpp::fcl::MeshLoader loader(bv_type);
hpp::fcl::BVHModelPtr_t bvh = loader.load(file_name);
bvh->buildConvexHull(true, "Qt");
return bvh->convex;
}
int main() {
// Create the hppfcl shapes.
// Hppfcl supports many primitive shapes: boxes, spheres, capsules, cylinders, ellipsoids, cones, planes,
// halfspace and convex meshes (i.e. convex hulls of clouds of points).
// It also supports BVHs (bounding volumes hierarchies), height-fields and octrees.
std::shared_ptr<hpp::fcl::Ellipsoid> shape1 = std::make_shared<hpp::fcl::Ellipsoid>(0.7, 1.0, 0.8);
std::shared_ptr<hpp::fcl::ConvexBase> shape2 = loadConvexMesh("../path/to/mesh/file.obj");
// Define the shapes' placement in 3D space
hpp::fcl::Transform3f T1;
T1.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T1.setTranslation(hpp::fcl::Vec3f::Random());
hpp::fcl::Transform3f T2 = hpp::fcl::Transform3f::Identity();
T2.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T2.setTranslation(hpp::fcl::Vec3f::Random());
// Define collision requests and results.
//
// The collision request allows to set parameters for the collision pair.
// For example, we can set a positive or negative security margin.
// If the distance between the shapes is less than the security margin, the shapes
// will be considered in collision.
// Setting a positive security margin can be usefull in motion planning,
// i.e to prevent shapes from getting too close to one another.
// In physics simulation, allowing a negative security margin may be usefull to stabilize the simulation.
hpp::fcl::CollisionRequest col_req;
col_req.security_margin = 1e-1;
// A collision result stores the result of the collision test (signed distance between the shapes,
// witness points location, normal etc.)
hpp::fcl::CollisionResult col_res;
// Collision call
hpp::fcl::collide(shape1.get(), T1, shape2.get(), T2, col_req, col_res);
// We can access the collision result once it has been populated
std::cout << "Collision? " << col_res.isCollision() << "\n";
if (col_res.isCollision()) {
hpp::fcl::Contact contact = col_res.getContact(0);
// The penetration depth does **not** take into account the security margin.
// Consequently, the penetration depth is the true signed distance which separates the shapes.
// To have the distance which takes into account the security margin, we can simply add the two together.
std::cout << "Penetration depth: " << contact.penetration_depth << "\n";
std::cout << "Distance between the shapes including the security margin: " << contact.penetration_depth + col_req.security_margin << "\n";
std::cout << "Witness point on shape1: " << contact.nearest_points[0].transpose() << "\n";
std::cout << "Witness point on shape2: " << contact.nearest_points[1].transpose() << "\n";
std::cout << "Normal: " << contact.normal.transpose() << "\n";
}
// Before calling another collision test, it is important to clear the previous results stored in the collision result.
col_res.clear();
return 0;
}
Python example
Here is the C++ example from above translated in python using HPP-FCL’s python bindings:
import numpy as np
import hppfcl
# Optional:
# The Pinocchio library is a rigid body algorithms library and has a handy SE3 module.
# It can be installed as simply as `conda -c conda-forge install pinocchio`.
# Installing pinocchio also installs hpp-fcl.
import pinocchio as pin
def loadConvexMesh(file_name: str):
loader = hppfcl.MeshLoader()
bvh: hppfcl.BVHModelBase = loader.load(file_name)
bvh.buildConvexHull(True, "Qt")
return bvh.convex
if __name__ == "__main__":
# Create hppfcl shapes
shape1 = hppfcl.Ellipsoid(0.7, 1.0, 0.8)
shape2 = loadConvexMesh("../path/to/mesh/file.obj")
# Define the shapes' placement in 3D space
T1 = hppfcl.Transform3f()
T1.setTranslation(pin.SE3.Random().translation)
T1.setRotation(pin.SE3.Random().rotation)
T2 = hppfcl.Transform3f();
# Using np arrays also works
T1.setTranslation(np.random.rand(3))
T2.setRotation(pin.SE3.Random().rotation)
# Define collision requests and results
col_req = hppfcl.CollisionRequest()
col_res = hppfcl.CollisionResult()
# Collision call
hppfcl.collide(shape1, T1, shape2, T2, col_req, col_res)
# Accessing the collision result once it has been populated
print("Is collision? ", {col_res.isCollision()})
if col_res.isCollision():
contact: hppfcl.Contact = col_res.getContact(0)
print("Penetration depth: ", contact.penetration_depth)
print("Distance between the shapes including the security margin: ", contact.penetration_depth + col_req.security_margin)
print("Witness point shape1: ", contact.getNearestPoint1())
print("Witness point shape2: ", contact.getNearestPoint2())
print("Normal: ", contact.normal)
# Before running another collision call, it is important to clear the old one
col_res.clear()
Acknowledgments
The development of HPP-FCL is actively supported by the Gepetto team @LAAS-CNRS, the Willow team @INRIA and, to some extend, Eureka Robotics.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Added
Transform3f::RandomandTransform3f::setRandom(#584) - New feature: computation of contact surfaces for any pair of primitive shapes (triangle, sphere, ellipsoid, plane, halfspace, cone, capsule, cylinder, convex) (#574).
- Enhance Broadphase DynamicAABBTree to better handle planes and halfspace (#570)
-
#558:
- [internal] Removed dead code in
narrowphase/details.h(#558) - [internal] Removed specializations of methods of
GJKSolver. Now the specializations are all handled byShapeShapeDistanceinshape_shape_func.h. - [new feature] Added support for Swept-Sphere primitives (sphere, box, capsule, cone, ellipsoid, triangle, halfspace, plane, convex mesh).
- [internal] Removed dead code in
- [API change] Renamed default convergence criterion from
VDBtoDefault(#556) - Fixed EPA returning nans on cases where it could return an estimate of the normal and penetration depth. (#556)
- Fixed too low tolerance in GJK/EPA asserts (#554)
- Fixed
normal_and_nearest_pointstest (no need to have Eigen 3.4) (#553) - #549
- Optimize EPA: ignore useless faces in EPA’s polytope; warm-start support computation for
Convex; fix edge-cases witness points computation. - Add
Serializabletrait to transform, collision data, collision geometries, bounding volumes, bvh models, hfields. Collision problems can now be serialized from C++ and sent to python and vice versa. - CMake: allow use of installed jrl-cmakemodules (#564)
- Python: add id() support for geometries (#618).
Fixed
- Fix Fix serialization unit test when running without Qhull support (#611)
- Compiler warnings (#601, #605)
- CMake: fix assimp finder
- Don’t define GCC7 Boost serialization hack when
HPP_FCL_SKIP_EIGEN_BOOST_SERIALIZATIONis defined (#530) - Default parameters for narrowphase algorithms (GJK and EPA); fixed assertion checks that were sometimes failing in GJK simplex projection and BVH
collide(#531). - Created a new macro
HPP_FCL_ASSERTwhich behaves as an assert by default. When the optionHPP_FCL_TURN_ASSERT_INTO_EXCEPTIONis turned on, it replaces the macro by an exception (#533). Also fixed an EPA assert inGJKSolver. - Simplify internals of hpp-fcl (#535):
- Computing distance between 2 primitives shapes does not use a traversal node anymore.
- Removed successive mallocs in GJK/EPA when using an instance of
GJKSolvermultiple times. -
GJKSolvernow deals with all statuses of GJK/EPA. Some of these statuses represent a bad behavior of GJK/EPA and now trigger an assertion in Debug mode. Usefull for debugging these algos. - Logging was added with macros like
HPP_FCL_LOG_(INFO/DEBUG/WARNING/ERROR); hpp-fcl can now log usefull info when the preprocessor optionHPP_FCL_ENABLE_LOGGINGis enabled. - Deprecated
enable_distance_lower_boundinCollisionRequest; a lower bound on distance is always computed. - Deprecated
enable_nearest_pointsinDistanceRequest; they are always computed and are the points of the shapes that achieve a distance ofDistanceResult::min_distance. - Added
enable_signed_distanceflag inDistanceRequest(defaulttrue). Turn this of for better performance if only the distance when objects are disjoint is needed. - The internal collision and distance functions of hpp-fcl now use
CollisionRequest::enable_contactandDistanceRequest::enable_signed_distanceto control whether or not penetration information should be computed. There are many scenarios where we don’t need the penetration information and only want to know if objects are colliding and compute their distance only if they are disjoint. These flags allow the user to control the trade-off between performance vs. information of the library. - Fix convergence criterion of EPA; made GJK and EPA convergence criterion absolute + relative to scale to the shapes’ dimensions; remove max face/vertices fields from EPA (these can be deduced from the max number of iterations)
- Account for lateral borders in Height Fields model.
- Fix compilation error on recent APPLE compilers (#539).
- Fix printing of deprecated message (#540).
- Fix compilation with earlier Eigen version
- Fix compilation warning message
- Fix issue in Octomap.computeLocalAABB
- Fix unsupported function for contact_patch_matrix
- Fix Octomap dependency on ROS
2.4.5 - 2024-07-28
Fixed
- Fix Octomap dependency on ROS
2.4.4 - 2024-03-06
2.4.3 - 2024-03-06
Fixed
- updated cmake module to fix documentation generation
- test documentation in conda ci
2.4.2 - 2024-03-06
Fixed
- Fix CMAKE_INSTALL_{} path for installation (#543)
2.4.1 - 2024-01-23
Fixed
- CachedMeshLoader checks file last modification time.
- Fix call to clear methods for {Collision,Distance}Data inside init function (#509)
- CMake: fix submodule use in bindings in (#512)
- Fix bug in DynamicAABBTreeCollisionManager (see #514) in (#515)
Added
- In struct Contact
- Documentation of the members,
- initialization of normal, closest points and contact point in constructors
- method getDistanceToCollision
- New variant of GJK (PolyakAcceleration).
- Specialization of distance computation between
- Sphere and Capsule,
- Ellipsoid and Halfspace,
- Ellipsoid and Plane.
- Collision computation between Octree and HeightField.
Changed
- Matrixx3f and Matrixx3i become row major.
- Use shared pointers to vectors instead of arrays for vertices and triangles in class BVHModelBase.
Removed
- members related epa in class QueryRequest
2.4.0 - 2023-11-27
Added
- Add method to
CollisionObjectto getCollisionGeometryraw pointer
Fixed
- Fix RPATH computation on OSX
- Fix Python stubs generation on Windows
2.3.7 - 2023-11-15
What’s Changed
2.3.6 - 2023-09-30
What’s Changed
- Update ROS_DISTRO by @jcarpent (#442)
- Add citations by @jcarpent (#449)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#444)
- [WIP] Debug by @jcarpent (#455)
- CMake: require >= 3.10 by @nim65s (#453)
- core: fix SaPCollisionManager::empty() by @rujialiu (#454)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#452)
New Contributors
2.3.5 - 2023-07-11
What’s Changed
- Fix compilation warning by @jcarpent (#434)
- Fix parsing of doxygen doc by @jcarpent (#439)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#438)
2.3.4 - 2023-06-01
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#414)
- Fix conversion warning by @wxmerkt (#417)
- Add missing boost include by @nim65s (#418)
- ci: update macos-linux-pip by @nim65s (#419)
- Modernize Cmake use by @nim65s (#420)
- tests: use boost::filesystem by @nim65s (#424)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#425)
- Update minimal Python version by @jcarpent (#427)
- Sync submodule cmake by @jcarpent (#430)
- Sync submodule CMake by @jcarpent (#431)
2.3.3 - 2023-05-09
What’s Changed
2.3.2 - 2023-04-27
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#391)
- Sync submodule cmake by @jcarpent (#393)
- Topic/rpath by @nim65s (#394)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#396)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#399)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#402)
- Sync submodule cmake by @jcarpent (#406)
2.3.1 - 2023-03-25
What’s Changed
- Remove useless call to /proc/cpuinfo by @jcarpent (#385)
- Add pip CI by @nim65s (#386)
- [GJKSolver] Fix missing switch case in result status of GJK by @lmontaut (#387)
- Sync submodule cmake by @jcarpent (#388)
2.3.0 - 2023-03-17
What’s Changed
- [CI] Remove EOL Galactic by @wxmerkt (#366)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#367)
- Sync submodule cmake by @jcarpent (#368)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#369)
- Adding EarlyStopped flag in GJK by @lmontaut (#371)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#373)
- Update CI by @jcarpent (#374)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#375)
- Skip test if BUILD_TESTING is OFF by @jcarpent (#378)
2.2.0 - 2022-12-12
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#358)
- Extract checks if AABB overlap by @jmirabel (#360)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#361)
- Sync submodule CMake by @jcarpent (#362)
- Add support of Pickling by @jcarpent (#363)
2.1.4 - 2022-10-24
What’s Changed
- Sync submodule CMake by @jcarpent (#352)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#353)
2.1.3 - 2022-09-13
What’s Changed
- Minor boost cleanup by @pantor (#331)
- [CI] Activate ROS2 configurations by @wxmerkt (#332)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#337)
- Sync submodule cmake by @jcarpent (#341)
- Fix shapeIntersect when for EPA FallBack by @jcarpent (#342)
- Fix findAssimp on Windows by @jcarpent (#345)
- Sync submodule cmake by @jcarpent (#347)
New Contributors
2.1.2 - 2022-08-01
What’s Changed
- core: add EPA::FallBack condition to shapeDistance computation by @lmontaut (#325)
- CMake: update to eigenpy 2.7.10 by @nim65s (#327)
2.1.1 - 2022-07-25
What’s Changed
- cmake: relocatable package for recent CMake versions by @nim65s (#319)
- ROS2/Colcon integration by @wxmerkt (#321)
2.1.0 - 2022-07-13
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#288)
- Add enum helpers by @jcarpent (#290)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#294)
- Ellipsoids in collision & distance matrices by @lmontaut (#295)
- doc: simplex projection in GJK class. by @lmontaut (#296)
- Feature: Nesterov acceleration for GJK by @lmontaut (#289)
- Add more testing to broadphase by @jcarpent (#298)
- Feature: adding convergence criterions for GJK algorithm by @lmontaut (#299)
- Sync submodule cmake by @jcarpent (#300)
- Reorder triangles when computing convex hulls by @lmontaut (#301)
- Exposing gjk utils by @lmontaut (#302)
- Fix assert precision in GJK by @jcarpent (#304)
- Simplify GJKSolver settings by @jcarpent (#305)
- Add CollisionResult::nearest_points by @jcarpent (#303)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#306)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#309)
- Fix minimal value for GJK::distance_upper_bound by @jcarpent (#310)
- Fix incoherent overlap by @jcarpent (#311)
- Expose shared_ptr
by [@Jiayuan-Gu](https://github.com/Jiayuan-Gu) ([#314](https://github.com/humanoid-path-planner/hpp-fcl/pull/314)) - test/gjk_convergence_criterion: Add check on GJK::Status by @wxmerkt (#315)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#316)
- Handle negative security margin by @jcarpent (#312)
New Contributors
- @Jiayuan-Gu made their first contribution (#314)
2.0.1 - 2022-04-15
This PR mainly fixes packaging issues and removes compilation warnings.
What’s Changed
- Zero warnings by @wxmerkt (#282)
- Sync submodule cmake by @jcarpent (#283)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#284)
- Activate python3-pylatexenc dependency by @wxmerkt (#286)
- Comment pylatexenc again since it’s not available on the buildfarm by @wxmerkt (#287)
New Contributors
- @pre-commit-ci made their first contribution (#284)
2.0.0 - 2022-04-06
This new release reintroduces the full support of Broad phase within hpp-fcl while also enforcing C++11 as minimal standard.
What’s Changed
- Add Ellipsoid by @jcarpent (#259)
- Removing comment about inflation. by @lmontaut (#261)
- Reintroduce broadphase by @jcarpent (#260)
- Simplify CollisionObject by removing cgeom_const by @jcarpent (#263)
- Address some warnings by @wxmerkt (#262)
- Fix missing copy of aabb_local in CollisionGeometry by @jcarpent (#264)
- use std::shared_ptr, fix #218 by @nim65s (#266)
- Fix broadphase warnings for clang (some conversion remain for g++) by @wxmerkt (#268)
- [ComputeCollision] Return no collision if security_margin is set to -inf by @florent-lamiraux (#271)
- tests: remove link to boost unit test framework by @nim65s (#270)
- Fix computation of aabb_center by @jcarpent (#273)
- Add operator== and operator!= to CollisionGeometry by @jcarpent (#274)
- Merge pull request #276 from humanoid-path-planner/patch-release-1.8.1 by @jcarpent (#277)
- Fix some missing features in base classes by @jcarpent (#275)
- Add operator{==,!=} to CollisionObject by @jcarpent (#278)
- Configure and apply pre-commit by @jcarpent (#280)
- Fix DistanceCallBackBaseWrapper by @jcarpent (#281)
New Contributors
1.8.1 - 2022-03-20
What’s Changed
1.8.0 - 2022-02-08
What’s Changed
- [CMake] Qhull is a private dependency by @nim65s (#247)
- Remove useless warnings by @jcarpent (#248)
- fix submodule url by @nim65s (#246)
- Remove warnings and add missing noalias by @jcarpent (#249)
- Function makeOctree returns a shared pointer by @florent-lamiraux (#254)
- Add support of HeightField by @jcarpent (#251)
- [OcTree] Add method to save octree in obj file. by @florent-lamiraux (#256)
- Fix C++98 compatibility by @jcarpent (#258)
1.7.8 - 2021-10-30
What’s Changed
- Fix conversion by @jcarpent (#242)
- Fix exposition of vertices by @jcarpent (#243)
- Enhance Convex exposition by @jcarpent (#244)
- Sync submodule cmake by @jcarpent (#245)
1.7.7 - 2021-09-13
This new release fixes several bugs within the framework.
1.7.6 - 2021-09-08
This new release improves the packaging of the project and integrates the Stub generation of Python bindings.
1.7.5 - 2021-07-30
This new release provides extended API exposition in Python, removes some code related to CDD while also trying to rely on the QHULL version present on the system.
1.7.4 - 2021-06-11
This release fixes several bugs:
- correct update of the distance lower bound
- fix memory footprint computation
while also removing the support of Travis CI.
1.7.3 - 2021-05-26
This new release provides:
- fixes of LINE and POINTS when loading meshes with assimp
- removing of various warnings
- computation of memory footprint for geometries
1.7.2 - 2021-04-19
This new release improves the loading of meshes using Assimp by automatically removing degenerated LINES and POINTS.
1.7.1 - 2021-04-02
This new release reduces the impact of timers on the computations. This should be used with care and can be enabled by setting the correct flag to true in the QueryRequest.
1.7.0 - 2021-03-31
This new release provides:
- extended support for serialization
- timing of the collision/distance computations
- helpers to build octree
- various bug fixes and interface improvements
1.6.0 - 2020-10-06
This new release provides:
- functors for evaluating Collision and Distances (faster call)
- extended support of v142 compiler
- support of collision check between HalfSpace and Convex shapes
- improvement of GJK solver
- fixes on Python bindings
1.5.4 - 2020-09-22
In this new release, the support of collision checking between Convex objects and HalfSpace have been enhanced and some minor fixes have been provided.
1.5.3 - 2020-08-31
This new release provides better CMake packaging and improved GJK algorithms.
1.5.2 - 2020-08-15
This release improves the packaging of the project and provides fixes for the GJK solver.
1.5.1 - 2020-08-06
This new release fixes packaging issues with precedent release 1.5.0. It also provides additional fixes in main collision/distance algorithms.
1.4.6 - 2020-06-10
This new release enhances the packaging of the project and allows the compilation of FCL on Windows systems.
1.4.5 - 2020-06-03
Changes in v1.4.5:
- Fix Python 3 doc generation
- Fix packaging of the project
- Compilation on Windows.
- [CMake] Install missing header.
- Add collide and distance prototype that update the GJK guess.
- Add support function cached guess in queries and merge query attribute.
- Add function to generate the convex hull.
- Add hint to the support function + Fix usage of GJK guess.
- [Python] Add constructor for class Convex.
- [Python] Bind functions to create BVHModel.
1.4.4 - 2020-04-29
Changes in 1.4.4:
- add MeshLoader::loadOctree
- fix generation of XML documentation
- fix generation of Doxygen documentation
1.4.3 - 2020-04-08
This new release fixes some packagings issues for OS X systems.
1.4.2 - 2020-04-04
Changes in v1.4.2:
- don’t require linking to eigenpy in .pc file.
1.4.1 - 2020-04-03
Changes in v1.4.1:
- Bug fix + prepare optimization of collision using GJK / EPA
- Add missing constructor for Transform3f
1.4.0 - 2020-04-03
Changes since v1.3.0:
- Improve code efficiency + use shared memory between Numpy and Eigen
- [Python] Doc and minor update + [C++] bugfix
- [Python] Fix bindings of CollisionResult.
- FIX: throw when no contact is available
- Minor fix and computational improvments
- [GJK/EPA] Fix bugs + Treat sphere as point and capsule as line segment.
- Fix boxSphereDistance
- Provide documentation for the Python bindings.
- Generate Python documentation from doxygen documentation.
- Fix issue when Python_EXECUTABLE is not defined
- update CMake packaging
1.3.0 - 2020-01-28
This new release comes with:
- the removing of the GJK solver
- the Python bindings build by default
- an improved documentation
- additional Python bindings
1.2.2 - 2019-12-17
This new Release improves the Python bindings and fixes an important bug when checking the collision between two Capsules.
Thanks to @rstrudel for this fix.
1.2.1 - 2019-12-09
This new release improves both the packaging of the project, which seems to be totally compatible with the new CMake linkage style. In addition, the bindings are now fully compatible with Pinocchio.
1.2.0 - 2019-11-22
Changes since v1.1.3:
- Add python bindings
- Update CMake
- Add version support
- New folder Internal for internal header
- Travis: update CI & change policy to only perform build in DEBUG mode on Bionic
- assimp: fix issue with recent version of assimp
- [bindings] [CMakeLists] Use .so for Mac and .pyd for Windows, fix #86
- Organize documentation
- [CMake] fix octomap detection
- [Minor] update CMake module + fix visibility of some methods.
- Enable Convex / Convex queries + Add Python bindings.
- Fix unit-tests and compilation
- [GJK] Fix GJK::encloseOrigin (fixes unit-tests)
- Improve GJK implementation + OBB overlap test + bug fixes
- Clean include BV/BVH/math/mesh_loader
1.1.3 - 2019-08-07
This new release enhances the compatibility of hpp-fcl with C++14 and more. This feature is requested for integration in Anaconda.
1.1.2 - 2019-08-05
This new release provides a fix in the parallelization of the computations and improves the packaging of the whole project.
1.0.2 - 2019-04-24
Changes since v1.0.1:
- obb: fix compatibility with Eigen 3.0.5
- [CI] octomap for osx
1.0.1 - 2019-02-20
- Fix CI on OSX
- Declare CachedMeshLoader::Key::operator<
- minor details
0.7.0 - 2019-01-31
This release is mainly here to allow the packaging of HPP-RBPRM. Another release will follow with more news.
0.6.0 - 2018-10-22
- Fix bug when OCTOMAP is not found
- move buildTrianglePlane and clipTriangle method from private to public
- Fix bug with “" symbols
- [CMake] Add flags related to Octomap in pkg-config file and remove FCL_HAVE_EIGEN
0.5.1 - 2017-10-02
Now Eigen is at the heart of linear algebra computations.
0.5 - 2017-03-17
First release
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged hpp-fcl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | BSD |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2024-10-10 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Wolfgang Merkt
Authors
HPP-FCL — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015. Since then, a large part of the code has been rewritten or removed (for the unused and untested part). The broad phase was reintroduced by Justin Carpentier in 2022 based on the FCL version 0.7.0.
If you use HPP-FCL in your projects and research papers, we would appreciate it if you’d cite it.
New features
Compared to the original FCL library, the main new features are:
- a dedicated and efficient implementation of the GJK algorithm (we do not rely anymore on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performances (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
This project is now used in many robotics frameworks such as Pinocchio, an open-source software that implements efficient and versatile rigid body dynamics algorithms, the Humanoid Path Planner, an open-source software for Motion and Manipulation Planning. HPP-FCL has also been recently used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, HPP-FCL implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performances, as depicted by the figures below.
On the one hand, we have benchmarked HPP-FCL against major software alternatives of the state of the art:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why.
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Pinocchio
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install hpp-fcl.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using HPP-FCL in C++:
#include "hpp/fcl/math/transform.h"
#include "hpp/fcl/mesh_loader/loader.h"
#include "hpp/fcl/BVH/BVH_model.h"
#include "hpp/fcl/collision.h"
#include "hpp/fcl/collision_data.h"
#include <iostream>
#include <memory>
// Function to load a convex mesh from a `.obj`, `.stl` or `.dae` file.
//
// This function imports the object inside the file as a BVHModel, i.e. a point cloud
// which is hierarchically transformed into a tree of bounding volumes.
// The leaves of this tree are the individual points of the point cloud
// stored in the `.obj` file.
// This BVH can then be used for collision detection.
//
// For better computational efficiency, we sometimes prefer to work with
// the convex hull of the point cloud. This insures that the underlying object
// is convex and thus very fast collision detection algorithms such as
// GJK or EPA can be called with this object.
// Consequently, after creating the BVH structure from the point cloud, this function
// also computes its convex hull.
std::shared_ptr<hpp::fcl::ConvexBase> loadConvexMesh(const std::string& file_name) {
hpp::fcl::NODE_TYPE bv_type = hpp::fcl::BV_AABB;
hpp::fcl::MeshLoader loader(bv_type);
hpp::fcl::BVHModelPtr_t bvh = loader.load(file_name);
bvh->buildConvexHull(true, "Qt");
return bvh->convex;
}
int main() {
// Create the hppfcl shapes.
// Hppfcl supports many primitive shapes: boxes, spheres, capsules, cylinders, ellipsoids, cones, planes,
// halfspace and convex meshes (i.e. convex hulls of clouds of points).
// It also supports BVHs (bounding volumes hierarchies), height-fields and octrees.
std::shared_ptr<hpp::fcl::Ellipsoid> shape1 = std::make_shared<hpp::fcl::Ellipsoid>(0.7, 1.0, 0.8);
std::shared_ptr<hpp::fcl::ConvexBase> shape2 = loadConvexMesh("../path/to/mesh/file.obj");
// Define the shapes' placement in 3D space
hpp::fcl::Transform3f T1;
T1.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T1.setTranslation(hpp::fcl::Vec3f::Random());
hpp::fcl::Transform3f T2 = hpp::fcl::Transform3f::Identity();
T2.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T2.setTranslation(hpp::fcl::Vec3f::Random());
// Define collision requests and results.
//
// The collision request allows to set parameters for the collision pair.
// For example, we can set a positive or negative security margin.
// If the distance between the shapes is less than the security margin, the shapes
// will be considered in collision.
// Setting a positive security margin can be usefull in motion planning,
// i.e to prevent shapes from getting too close to one another.
// In physics simulation, allowing a negative security margin may be usefull to stabilize the simulation.
hpp::fcl::CollisionRequest col_req;
col_req.security_margin = 1e-1;
// A collision result stores the result of the collision test (signed distance between the shapes,
// witness points location, normal etc.)
hpp::fcl::CollisionResult col_res;
// Collision call
hpp::fcl::collide(shape1.get(), T1, shape2.get(), T2, col_req, col_res);
// We can access the collision result once it has been populated
std::cout << "Collision? " << col_res.isCollision() << "\n";
if (col_res.isCollision()) {
hpp::fcl::Contact contact = col_res.getContact(0);
// The penetration depth does **not** take into account the security margin.
// Consequently, the penetration depth is the true signed distance which separates the shapes.
// To have the distance which takes into account the security margin, we can simply add the two together.
std::cout << "Penetration depth: " << contact.penetration_depth << "\n";
std::cout << "Distance between the shapes including the security margin: " << contact.penetration_depth + col_req.security_margin << "\n";
std::cout << "Witness point on shape1: " << contact.nearest_points[0].transpose() << "\n";
std::cout << "Witness point on shape2: " << contact.nearest_points[1].transpose() << "\n";
std::cout << "Normal: " << contact.normal.transpose() << "\n";
}
// Before calling another collision test, it is important to clear the previous results stored in the collision result.
col_res.clear();
return 0;
}
Python example
Here is the C++ example from above translated in python using HPP-FCL’s python bindings:
import numpy as np
import hppfcl
# Optional:
# The Pinocchio library is a rigid body algorithms library and has a handy SE3 module.
# It can be installed as simply as `conda -c conda-forge install pinocchio`.
# Installing pinocchio also installs hpp-fcl.
import pinocchio as pin
def loadConvexMesh(file_name: str):
loader = hppfcl.MeshLoader()
bvh: hppfcl.BVHModelBase = loader.load(file_name)
bvh.buildConvexHull(True, "Qt")
return bvh.convex
if __name__ == "__main__":
# Create hppfcl shapes
shape1 = hppfcl.Ellipsoid(0.7, 1.0, 0.8)
shape2 = loadConvexMesh("../path/to/mesh/file.obj")
# Define the shapes' placement in 3D space
T1 = hppfcl.Transform3f()
T1.setTranslation(pin.SE3.Random().translation)
T1.setRotation(pin.SE3.Random().rotation)
T2 = hppfcl.Transform3f();
# Using np arrays also works
T1.setTranslation(np.random.rand(3))
T2.setRotation(pin.SE3.Random().rotation)
# Define collision requests and results
col_req = hppfcl.CollisionRequest()
col_res = hppfcl.CollisionResult()
# Collision call
hppfcl.collide(shape1, T1, shape2, T2, col_req, col_res)
# Accessing the collision result once it has been populated
print("Is collision? ", {col_res.isCollision()})
if col_res.isCollision():
contact: hppfcl.Contact = col_res.getContact(0)
print("Penetration depth: ", contact.penetration_depth)
print("Distance between the shapes including the security margin: ", contact.penetration_depth + col_req.security_margin)
print("Witness point shape1: ", contact.getNearestPoint1())
print("Witness point shape2: ", contact.getNearestPoint2())
print("Normal: ", contact.normal)
# Before running another collision call, it is important to clear the old one
col_res.clear()
Acknowledgments
The development of HPP-FCL is actively supported by the Gepetto team @LAAS-CNRS, the Willow team @INRIA and, to some extend, Eureka Robotics.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Added
Transform3f::RandomandTransform3f::setRandom(#584) - New feature: computation of contact surfaces for any pair of primitive shapes (triangle, sphere, ellipsoid, plane, halfspace, cone, capsule, cylinder, convex) (#574).
- Enhance Broadphase DynamicAABBTree to better handle planes and halfspace (#570)
-
#558:
- [internal] Removed dead code in
narrowphase/details.h(#558) - [internal] Removed specializations of methods of
GJKSolver. Now the specializations are all handled byShapeShapeDistanceinshape_shape_func.h. - [new feature] Added support for Swept-Sphere primitives (sphere, box, capsule, cone, ellipsoid, triangle, halfspace, plane, convex mesh).
- [internal] Removed dead code in
- [API change] Renamed default convergence criterion from
VDBtoDefault(#556) - Fixed EPA returning nans on cases where it could return an estimate of the normal and penetration depth. (#556)
- Fixed too low tolerance in GJK/EPA asserts (#554)
- Fixed
normal_and_nearest_pointstest (no need to have Eigen 3.4) (#553) - #549
- Optimize EPA: ignore useless faces in EPA’s polytope; warm-start support computation for
Convex; fix edge-cases witness points computation. - Add
Serializabletrait to transform, collision data, collision geometries, bounding volumes, bvh models, hfields. Collision problems can now be serialized from C++ and sent to python and vice versa. - CMake: allow use of installed jrl-cmakemodules (#564)
- Python: add id() support for geometries (#618).
Fixed
- Fix Fix serialization unit test when running without Qhull support (#611)
- Compiler warnings (#601, #605)
- CMake: fix assimp finder
- Don’t define GCC7 Boost serialization hack when
HPP_FCL_SKIP_EIGEN_BOOST_SERIALIZATIONis defined (#530) - Default parameters for narrowphase algorithms (GJK and EPA); fixed assertion checks that were sometimes failing in GJK simplex projection and BVH
collide(#531). - Created a new macro
HPP_FCL_ASSERTwhich behaves as an assert by default. When the optionHPP_FCL_TURN_ASSERT_INTO_EXCEPTIONis turned on, it replaces the macro by an exception (#533). Also fixed an EPA assert inGJKSolver. - Simplify internals of hpp-fcl (#535):
- Computing distance between 2 primitives shapes does not use a traversal node anymore.
- Removed successive mallocs in GJK/EPA when using an instance of
GJKSolvermultiple times. -
GJKSolvernow deals with all statuses of GJK/EPA. Some of these statuses represent a bad behavior of GJK/EPA and now trigger an assertion in Debug mode. Usefull for debugging these algos. - Logging was added with macros like
HPP_FCL_LOG_(INFO/DEBUG/WARNING/ERROR); hpp-fcl can now log usefull info when the preprocessor optionHPP_FCL_ENABLE_LOGGINGis enabled. - Deprecated
enable_distance_lower_boundinCollisionRequest; a lower bound on distance is always computed. - Deprecated
enable_nearest_pointsinDistanceRequest; they are always computed and are the points of the shapes that achieve a distance ofDistanceResult::min_distance. - Added
enable_signed_distanceflag inDistanceRequest(defaulttrue). Turn this of for better performance if only the distance when objects are disjoint is needed. - The internal collision and distance functions of hpp-fcl now use
CollisionRequest::enable_contactandDistanceRequest::enable_signed_distanceto control whether or not penetration information should be computed. There are many scenarios where we don’t need the penetration information and only want to know if objects are colliding and compute their distance only if they are disjoint. These flags allow the user to control the trade-off between performance vs. information of the library. - Fix convergence criterion of EPA; made GJK and EPA convergence criterion absolute + relative to scale to the shapes’ dimensions; remove max face/vertices fields from EPA (these can be deduced from the max number of iterations)
- Account for lateral borders in Height Fields model.
- Fix compilation error on recent APPLE compilers (#539).
- Fix printing of deprecated message (#540).
- Fix compilation with earlier Eigen version
- Fix compilation warning message
- Fix issue in Octomap.computeLocalAABB
- Fix unsupported function for contact_patch_matrix
- Fix Octomap dependency on ROS
2.4.5 - 2024-07-28
Fixed
- Fix Octomap dependency on ROS
2.4.4 - 2024-03-06
2.4.3 - 2024-03-06
Fixed
- updated cmake module to fix documentation generation
- test documentation in conda ci
2.4.2 - 2024-03-06
Fixed
- Fix CMAKE_INSTALL_{} path for installation (#543)
2.4.1 - 2024-01-23
Fixed
- CachedMeshLoader checks file last modification time.
- Fix call to clear methods for {Collision,Distance}Data inside init function (#509)
- CMake: fix submodule use in bindings in (#512)
- Fix bug in DynamicAABBTreeCollisionManager (see #514) in (#515)
Added
- In struct Contact
- Documentation of the members,
- initialization of normal, closest points and contact point in constructors
- method getDistanceToCollision
- New variant of GJK (PolyakAcceleration).
- Specialization of distance computation between
- Sphere and Capsule,
- Ellipsoid and Halfspace,
- Ellipsoid and Plane.
- Collision computation between Octree and HeightField.
Changed
- Matrixx3f and Matrixx3i become row major.
- Use shared pointers to vectors instead of arrays for vertices and triangles in class BVHModelBase.
Removed
- members related epa in class QueryRequest
2.4.0 - 2023-11-27
Added
- Add method to
CollisionObjectto getCollisionGeometryraw pointer
Fixed
- Fix RPATH computation on OSX
- Fix Python stubs generation on Windows
2.3.7 - 2023-11-15
What’s Changed
2.3.6 - 2023-09-30
What’s Changed
- Update ROS_DISTRO by @jcarpent (#442)
- Add citations by @jcarpent (#449)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#444)
- [WIP] Debug by @jcarpent (#455)
- CMake: require >= 3.10 by @nim65s (#453)
- core: fix SaPCollisionManager::empty() by @rujialiu (#454)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#452)
New Contributors
2.3.5 - 2023-07-11
What’s Changed
- Fix compilation warning by @jcarpent (#434)
- Fix parsing of doxygen doc by @jcarpent (#439)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#438)
2.3.4 - 2023-06-01
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#414)
- Fix conversion warning by @wxmerkt (#417)
- Add missing boost include by @nim65s (#418)
- ci: update macos-linux-pip by @nim65s (#419)
- Modernize Cmake use by @nim65s (#420)
- tests: use boost::filesystem by @nim65s (#424)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#425)
- Update minimal Python version by @jcarpent (#427)
- Sync submodule cmake by @jcarpent (#430)
- Sync submodule CMake by @jcarpent (#431)
2.3.3 - 2023-05-09
What’s Changed
2.3.2 - 2023-04-27
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#391)
- Sync submodule cmake by @jcarpent (#393)
- Topic/rpath by @nim65s (#394)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#396)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#399)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#402)
- Sync submodule cmake by @jcarpent (#406)
2.3.1 - 2023-03-25
What’s Changed
- Remove useless call to /proc/cpuinfo by @jcarpent (#385)
- Add pip CI by @nim65s (#386)
- [GJKSolver] Fix missing switch case in result status of GJK by @lmontaut (#387)
- Sync submodule cmake by @jcarpent (#388)
2.3.0 - 2023-03-17
What’s Changed
- [CI] Remove EOL Galactic by @wxmerkt (#366)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#367)
- Sync submodule cmake by @jcarpent (#368)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#369)
- Adding EarlyStopped flag in GJK by @lmontaut (#371)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#373)
- Update CI by @jcarpent (#374)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#375)
- Skip test if BUILD_TESTING is OFF by @jcarpent (#378)
2.2.0 - 2022-12-12
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#358)
- Extract checks if AABB overlap by @jmirabel (#360)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#361)
- Sync submodule CMake by @jcarpent (#362)
- Add support of Pickling by @jcarpent (#363)
2.1.4 - 2022-10-24
What’s Changed
- Sync submodule CMake by @jcarpent (#352)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#353)
2.1.3 - 2022-09-13
What’s Changed
- Minor boost cleanup by @pantor (#331)
- [CI] Activate ROS2 configurations by @wxmerkt (#332)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#337)
- Sync submodule cmake by @jcarpent (#341)
- Fix shapeIntersect when for EPA FallBack by @jcarpent (#342)
- Fix findAssimp on Windows by @jcarpent (#345)
- Sync submodule cmake by @jcarpent (#347)
New Contributors
2.1.2 - 2022-08-01
What’s Changed
- core: add EPA::FallBack condition to shapeDistance computation by @lmontaut (#325)
- CMake: update to eigenpy 2.7.10 by @nim65s (#327)
2.1.1 - 2022-07-25
What’s Changed
- cmake: relocatable package for recent CMake versions by @nim65s (#319)
- ROS2/Colcon integration by @wxmerkt (#321)
2.1.0 - 2022-07-13
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#288)
- Add enum helpers by @jcarpent (#290)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#294)
- Ellipsoids in collision & distance matrices by @lmontaut (#295)
- doc: simplex projection in GJK class. by @lmontaut (#296)
- Feature: Nesterov acceleration for GJK by @lmontaut (#289)
- Add more testing to broadphase by @jcarpent (#298)
- Feature: adding convergence criterions for GJK algorithm by @lmontaut (#299)
- Sync submodule cmake by @jcarpent (#300)
- Reorder triangles when computing convex hulls by @lmontaut (#301)
- Exposing gjk utils by @lmontaut (#302)
- Fix assert precision in GJK by @jcarpent (#304)
- Simplify GJKSolver settings by @jcarpent (#305)
- Add CollisionResult::nearest_points by @jcarpent (#303)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#306)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#309)
- Fix minimal value for GJK::distance_upper_bound by @jcarpent (#310)
- Fix incoherent overlap by @jcarpent (#311)
- Expose shared_ptr
by [@Jiayuan-Gu](https://github.com/Jiayuan-Gu) ([#314](https://github.com/humanoid-path-planner/hpp-fcl/pull/314)) - test/gjk_convergence_criterion: Add check on GJK::Status by @wxmerkt (#315)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#316)
- Handle negative security margin by @jcarpent (#312)
New Contributors
- @Jiayuan-Gu made their first contribution (#314)
2.0.1 - 2022-04-15
This PR mainly fixes packaging issues and removes compilation warnings.
What’s Changed
- Zero warnings by @wxmerkt (#282)
- Sync submodule cmake by @jcarpent (#283)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#284)
- Activate python3-pylatexenc dependency by @wxmerkt (#286)
- Comment pylatexenc again since it’s not available on the buildfarm by @wxmerkt (#287)
New Contributors
- @pre-commit-ci made their first contribution (#284)
2.0.0 - 2022-04-06
This new release reintroduces the full support of Broad phase within hpp-fcl while also enforcing C++11 as minimal standard.
What’s Changed
- Add Ellipsoid by @jcarpent (#259)
- Removing comment about inflation. by @lmontaut (#261)
- Reintroduce broadphase by @jcarpent (#260)
- Simplify CollisionObject by removing cgeom_const by @jcarpent (#263)
- Address some warnings by @wxmerkt (#262)
- Fix missing copy of aabb_local in CollisionGeometry by @jcarpent (#264)
- use std::shared_ptr, fix #218 by @nim65s (#266)
- Fix broadphase warnings for clang (some conversion remain for g++) by @wxmerkt (#268)
- [ComputeCollision] Return no collision if security_margin is set to -inf by @florent-lamiraux (#271)
- tests: remove link to boost unit test framework by @nim65s (#270)
- Fix computation of aabb_center by @jcarpent (#273)
- Add operator== and operator!= to CollisionGeometry by @jcarpent (#274)
- Merge pull request #276 from humanoid-path-planner/patch-release-1.8.1 by @jcarpent (#277)
- Fix some missing features in base classes by @jcarpent (#275)
- Add operator{==,!=} to CollisionObject by @jcarpent (#278)
- Configure and apply pre-commit by @jcarpent (#280)
- Fix DistanceCallBackBaseWrapper by @jcarpent (#281)
New Contributors
1.8.1 - 2022-03-20
What’s Changed
1.8.0 - 2022-02-08
What’s Changed
- [CMake] Qhull is a private dependency by @nim65s (#247)
- Remove useless warnings by @jcarpent (#248)
- fix submodule url by @nim65s (#246)
- Remove warnings and add missing noalias by @jcarpent (#249)
- Function makeOctree returns a shared pointer by @florent-lamiraux (#254)
- Add support of HeightField by @jcarpent (#251)
- [OcTree] Add method to save octree in obj file. by @florent-lamiraux (#256)
- Fix C++98 compatibility by @jcarpent (#258)
1.7.8 - 2021-10-30
What’s Changed
- Fix conversion by @jcarpent (#242)
- Fix exposition of vertices by @jcarpent (#243)
- Enhance Convex exposition by @jcarpent (#244)
- Sync submodule cmake by @jcarpent (#245)
1.7.7 - 2021-09-13
This new release fixes several bugs within the framework.
1.7.6 - 2021-09-08
This new release improves the packaging of the project and integrates the Stub generation of Python bindings.
1.7.5 - 2021-07-30
This new release provides extended API exposition in Python, removes some code related to CDD while also trying to rely on the QHULL version present on the system.
1.7.4 - 2021-06-11
This release fixes several bugs:
- correct update of the distance lower bound
- fix memory footprint computation
while also removing the support of Travis CI.
1.7.3 - 2021-05-26
This new release provides:
- fixes of LINE and POINTS when loading meshes with assimp
- removing of various warnings
- computation of memory footprint for geometries
1.7.2 - 2021-04-19
This new release improves the loading of meshes using Assimp by automatically removing degenerated LINES and POINTS.
1.7.1 - 2021-04-02
This new release reduces the impact of timers on the computations. This should be used with care and can be enabled by setting the correct flag to true in the QueryRequest.
1.7.0 - 2021-03-31
This new release provides:
- extended support for serialization
- timing of the collision/distance computations
- helpers to build octree
- various bug fixes and interface improvements
1.6.0 - 2020-10-06
This new release provides:
- functors for evaluating Collision and Distances (faster call)
- extended support of v142 compiler
- support of collision check between HalfSpace and Convex shapes
- improvement of GJK solver
- fixes on Python bindings
1.5.4 - 2020-09-22
In this new release, the support of collision checking between Convex objects and HalfSpace have been enhanced and some minor fixes have been provided.
1.5.3 - 2020-08-31
This new release provides better CMake packaging and improved GJK algorithms.
1.5.2 - 2020-08-15
This release improves the packaging of the project and provides fixes for the GJK solver.
1.5.1 - 2020-08-06
This new release fixes packaging issues with precedent release 1.5.0. It also provides additional fixes in main collision/distance algorithms.
1.4.6 - 2020-06-10
This new release enhances the packaging of the project and allows the compilation of FCL on Windows systems.
1.4.5 - 2020-06-03
Changes in v1.4.5:
- Fix Python 3 doc generation
- Fix packaging of the project
- Compilation on Windows.
- [CMake] Install missing header.
- Add collide and distance prototype that update the GJK guess.
- Add support function cached guess in queries and merge query attribute.
- Add function to generate the convex hull.
- Add hint to the support function + Fix usage of GJK guess.
- [Python] Add constructor for class Convex.
- [Python] Bind functions to create BVHModel.
1.4.4 - 2020-04-29
Changes in 1.4.4:
- add MeshLoader::loadOctree
- fix generation of XML documentation
- fix generation of Doxygen documentation
1.4.3 - 2020-04-08
This new release fixes some packagings issues for OS X systems.
1.4.2 - 2020-04-04
Changes in v1.4.2:
- don’t require linking to eigenpy in .pc file.
1.4.1 - 2020-04-03
Changes in v1.4.1:
- Bug fix + prepare optimization of collision using GJK / EPA
- Add missing constructor for Transform3f
1.4.0 - 2020-04-03
Changes since v1.3.0:
- Improve code efficiency + use shared memory between Numpy and Eigen
- [Python] Doc and minor update + [C++] bugfix
- [Python] Fix bindings of CollisionResult.
- FIX: throw when no contact is available
- Minor fix and computational improvments
- [GJK/EPA] Fix bugs + Treat sphere as point and capsule as line segment.
- Fix boxSphereDistance
- Provide documentation for the Python bindings.
- Generate Python documentation from doxygen documentation.
- Fix issue when Python_EXECUTABLE is not defined
- update CMake packaging
1.3.0 - 2020-01-28
This new release comes with:
- the removing of the GJK solver
- the Python bindings build by default
- an improved documentation
- additional Python bindings
1.2.2 - 2019-12-17
This new Release improves the Python bindings and fixes an important bug when checking the collision between two Capsules.
Thanks to @rstrudel for this fix.
1.2.1 - 2019-12-09
This new release improves both the packaging of the project, which seems to be totally compatible with the new CMake linkage style. In addition, the bindings are now fully compatible with Pinocchio.
1.2.0 - 2019-11-22
Changes since v1.1.3:
- Add python bindings
- Update CMake
- Add version support
- New folder Internal for internal header
- Travis: update CI & change policy to only perform build in DEBUG mode on Bionic
- assimp: fix issue with recent version of assimp
- [bindings] [CMakeLists] Use .so for Mac and .pyd for Windows, fix #86
- Organize documentation
- [CMake] fix octomap detection
- [Minor] update CMake module + fix visibility of some methods.
- Enable Convex / Convex queries + Add Python bindings.
- Fix unit-tests and compilation
- [GJK] Fix GJK::encloseOrigin (fixes unit-tests)
- Improve GJK implementation + OBB overlap test + bug fixes
- Clean include BV/BVH/math/mesh_loader
1.1.3 - 2019-08-07
This new release enhances the compatibility of hpp-fcl with C++14 and more. This feature is requested for integration in Anaconda.
1.1.2 - 2019-08-05
This new release provides a fix in the parallelization of the computations and improves the packaging of the whole project.
1.0.2 - 2019-04-24
Changes since v1.0.1:
- obb: fix compatibility with Eigen 3.0.5
- [CI] octomap for osx
1.0.1 - 2019-02-20
- Fix CI on OSX
- Declare CachedMeshLoader::Key::operator<
- minor details
0.7.0 - 2019-01-31
This release is mainly here to allow the packaging of HPP-RBPRM. Another release will follow with more news.
0.6.0 - 2018-10-22
- Fix bug when OCTOMAP is not found
- move buildTrianglePlane and clipTriangle method from private to public
- Fix bug with “" symbols
- [CMake] Add flags related to Octomap in pkg-config file and remove FCL_HAVE_EIGEN
0.5.1 - 2017-10-02
Now Eigen is at the heart of linear algebra computations.
0.5 - 2017-03-17
First release
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged hpp-fcl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | BSD |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2024-10-10 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Wolfgang Merkt
Authors
HPP-FCL — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015. Since then, a large part of the code has been rewritten or removed (for the unused and untested part). The broad phase was reintroduced by Justin Carpentier in 2022 based on the FCL version 0.7.0.
If you use HPP-FCL in your projects and research papers, we would appreciate it if you’d cite it.
New features
Compared to the original FCL library, the main new features are:
- a dedicated and efficient implementation of the GJK algorithm (we do not rely anymore on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performances (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
This project is now used in many robotics frameworks such as Pinocchio, an open-source software that implements efficient and versatile rigid body dynamics algorithms, the Humanoid Path Planner, an open-source software for Motion and Manipulation Planning. HPP-FCL has also been recently used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, HPP-FCL implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performances, as depicted by the figures below.
On the one hand, we have benchmarked HPP-FCL against major software alternatives of the state of the art:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why.
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Pinocchio
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install hpp-fcl.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using HPP-FCL in C++:
#include "hpp/fcl/math/transform.h"
#include "hpp/fcl/mesh_loader/loader.h"
#include "hpp/fcl/BVH/BVH_model.h"
#include "hpp/fcl/collision.h"
#include "hpp/fcl/collision_data.h"
#include <iostream>
#include <memory>
// Function to load a convex mesh from a `.obj`, `.stl` or `.dae` file.
//
// This function imports the object inside the file as a BVHModel, i.e. a point cloud
// which is hierarchically transformed into a tree of bounding volumes.
// The leaves of this tree are the individual points of the point cloud
// stored in the `.obj` file.
// This BVH can then be used for collision detection.
//
// For better computational efficiency, we sometimes prefer to work with
// the convex hull of the point cloud. This insures that the underlying object
// is convex and thus very fast collision detection algorithms such as
// GJK or EPA can be called with this object.
// Consequently, after creating the BVH structure from the point cloud, this function
// also computes its convex hull.
std::shared_ptr<hpp::fcl::ConvexBase> loadConvexMesh(const std::string& file_name) {
hpp::fcl::NODE_TYPE bv_type = hpp::fcl::BV_AABB;
hpp::fcl::MeshLoader loader(bv_type);
hpp::fcl::BVHModelPtr_t bvh = loader.load(file_name);
bvh->buildConvexHull(true, "Qt");
return bvh->convex;
}
int main() {
// Create the hppfcl shapes.
// Hppfcl supports many primitive shapes: boxes, spheres, capsules, cylinders, ellipsoids, cones, planes,
// halfspace and convex meshes (i.e. convex hulls of clouds of points).
// It also supports BVHs (bounding volumes hierarchies), height-fields and octrees.
std::shared_ptr<hpp::fcl::Ellipsoid> shape1 = std::make_shared<hpp::fcl::Ellipsoid>(0.7, 1.0, 0.8);
std::shared_ptr<hpp::fcl::ConvexBase> shape2 = loadConvexMesh("../path/to/mesh/file.obj");
// Define the shapes' placement in 3D space
hpp::fcl::Transform3f T1;
T1.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T1.setTranslation(hpp::fcl::Vec3f::Random());
hpp::fcl::Transform3f T2 = hpp::fcl::Transform3f::Identity();
T2.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T2.setTranslation(hpp::fcl::Vec3f::Random());
// Define collision requests and results.
//
// The collision request allows to set parameters for the collision pair.
// For example, we can set a positive or negative security margin.
// If the distance between the shapes is less than the security margin, the shapes
// will be considered in collision.
// Setting a positive security margin can be usefull in motion planning,
// i.e to prevent shapes from getting too close to one another.
// In physics simulation, allowing a negative security margin may be usefull to stabilize the simulation.
hpp::fcl::CollisionRequest col_req;
col_req.security_margin = 1e-1;
// A collision result stores the result of the collision test (signed distance between the shapes,
// witness points location, normal etc.)
hpp::fcl::CollisionResult col_res;
// Collision call
hpp::fcl::collide(shape1.get(), T1, shape2.get(), T2, col_req, col_res);
// We can access the collision result once it has been populated
std::cout << "Collision? " << col_res.isCollision() << "\n";
if (col_res.isCollision()) {
hpp::fcl::Contact contact = col_res.getContact(0);
// The penetration depth does **not** take into account the security margin.
// Consequently, the penetration depth is the true signed distance which separates the shapes.
// To have the distance which takes into account the security margin, we can simply add the two together.
std::cout << "Penetration depth: " << contact.penetration_depth << "\n";
std::cout << "Distance between the shapes including the security margin: " << contact.penetration_depth + col_req.security_margin << "\n";
std::cout << "Witness point on shape1: " << contact.nearest_points[0].transpose() << "\n";
std::cout << "Witness point on shape2: " << contact.nearest_points[1].transpose() << "\n";
std::cout << "Normal: " << contact.normal.transpose() << "\n";
}
// Before calling another collision test, it is important to clear the previous results stored in the collision result.
col_res.clear();
return 0;
}
Python example
Here is the C++ example from above translated in python using HPP-FCL’s python bindings:
import numpy as np
import hppfcl
# Optional:
# The Pinocchio library is a rigid body algorithms library and has a handy SE3 module.
# It can be installed as simply as `conda -c conda-forge install pinocchio`.
# Installing pinocchio also installs hpp-fcl.
import pinocchio as pin
def loadConvexMesh(file_name: str):
loader = hppfcl.MeshLoader()
bvh: hppfcl.BVHModelBase = loader.load(file_name)
bvh.buildConvexHull(True, "Qt")
return bvh.convex
if __name__ == "__main__":
# Create hppfcl shapes
shape1 = hppfcl.Ellipsoid(0.7, 1.0, 0.8)
shape2 = loadConvexMesh("../path/to/mesh/file.obj")
# Define the shapes' placement in 3D space
T1 = hppfcl.Transform3f()
T1.setTranslation(pin.SE3.Random().translation)
T1.setRotation(pin.SE3.Random().rotation)
T2 = hppfcl.Transform3f();
# Using np arrays also works
T1.setTranslation(np.random.rand(3))
T2.setRotation(pin.SE3.Random().rotation)
# Define collision requests and results
col_req = hppfcl.CollisionRequest()
col_res = hppfcl.CollisionResult()
# Collision call
hppfcl.collide(shape1, T1, shape2, T2, col_req, col_res)
# Accessing the collision result once it has been populated
print("Is collision? ", {col_res.isCollision()})
if col_res.isCollision():
contact: hppfcl.Contact = col_res.getContact(0)
print("Penetration depth: ", contact.penetration_depth)
print("Distance between the shapes including the security margin: ", contact.penetration_depth + col_req.security_margin)
print("Witness point shape1: ", contact.getNearestPoint1())
print("Witness point shape2: ", contact.getNearestPoint2())
print("Normal: ", contact.normal)
# Before running another collision call, it is important to clear the old one
col_res.clear()
Acknowledgments
The development of HPP-FCL is actively supported by the Gepetto team @LAAS-CNRS, the Willow team @INRIA and, to some extend, Eureka Robotics.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Added
Transform3f::RandomandTransform3f::setRandom(#584) - New feature: computation of contact surfaces for any pair of primitive shapes (triangle, sphere, ellipsoid, plane, halfspace, cone, capsule, cylinder, convex) (#574).
- Enhance Broadphase DynamicAABBTree to better handle planes and halfspace (#570)
-
#558:
- [internal] Removed dead code in
narrowphase/details.h(#558) - [internal] Removed specializations of methods of
GJKSolver. Now the specializations are all handled byShapeShapeDistanceinshape_shape_func.h. - [new feature] Added support for Swept-Sphere primitives (sphere, box, capsule, cone, ellipsoid, triangle, halfspace, plane, convex mesh).
- [internal] Removed dead code in
- [API change] Renamed default convergence criterion from
VDBtoDefault(#556) - Fixed EPA returning nans on cases where it could return an estimate of the normal and penetration depth. (#556)
- Fixed too low tolerance in GJK/EPA asserts (#554)
- Fixed
normal_and_nearest_pointstest (no need to have Eigen 3.4) (#553) - #549
- Optimize EPA: ignore useless faces in EPA’s polytope; warm-start support computation for
Convex; fix edge-cases witness points computation. - Add
Serializabletrait to transform, collision data, collision geometries, bounding volumes, bvh models, hfields. Collision problems can now be serialized from C++ and sent to python and vice versa. - CMake: allow use of installed jrl-cmakemodules (#564)
- Python: add id() support for geometries (#618).
Fixed
- Fix Fix serialization unit test when running without Qhull support (#611)
- Compiler warnings (#601, #605)
- CMake: fix assimp finder
- Don’t define GCC7 Boost serialization hack when
HPP_FCL_SKIP_EIGEN_BOOST_SERIALIZATIONis defined (#530) - Default parameters for narrowphase algorithms (GJK and EPA); fixed assertion checks that were sometimes failing in GJK simplex projection and BVH
collide(#531). - Created a new macro
HPP_FCL_ASSERTwhich behaves as an assert by default. When the optionHPP_FCL_TURN_ASSERT_INTO_EXCEPTIONis turned on, it replaces the macro by an exception (#533). Also fixed an EPA assert inGJKSolver. - Simplify internals of hpp-fcl (#535):
- Computing distance between 2 primitives shapes does not use a traversal node anymore.
- Removed successive mallocs in GJK/EPA when using an instance of
GJKSolvermultiple times. -
GJKSolvernow deals with all statuses of GJK/EPA. Some of these statuses represent a bad behavior of GJK/EPA and now trigger an assertion in Debug mode. Usefull for debugging these algos. - Logging was added with macros like
HPP_FCL_LOG_(INFO/DEBUG/WARNING/ERROR); hpp-fcl can now log usefull info when the preprocessor optionHPP_FCL_ENABLE_LOGGINGis enabled. - Deprecated
enable_distance_lower_boundinCollisionRequest; a lower bound on distance is always computed. - Deprecated
enable_nearest_pointsinDistanceRequest; they are always computed and are the points of the shapes that achieve a distance ofDistanceResult::min_distance. - Added
enable_signed_distanceflag inDistanceRequest(defaulttrue). Turn this of for better performance if only the distance when objects are disjoint is needed. - The internal collision and distance functions of hpp-fcl now use
CollisionRequest::enable_contactandDistanceRequest::enable_signed_distanceto control whether or not penetration information should be computed. There are many scenarios where we don’t need the penetration information and only want to know if objects are colliding and compute their distance only if they are disjoint. These flags allow the user to control the trade-off between performance vs. information of the library. - Fix convergence criterion of EPA; made GJK and EPA convergence criterion absolute + relative to scale to the shapes’ dimensions; remove max face/vertices fields from EPA (these can be deduced from the max number of iterations)
- Account for lateral borders in Height Fields model.
- Fix compilation error on recent APPLE compilers (#539).
- Fix printing of deprecated message (#540).
- Fix compilation with earlier Eigen version
- Fix compilation warning message
- Fix issue in Octomap.computeLocalAABB
- Fix unsupported function for contact_patch_matrix
- Fix Octomap dependency on ROS
2.4.5 - 2024-07-28
Fixed
- Fix Octomap dependency on ROS
2.4.4 - 2024-03-06
2.4.3 - 2024-03-06
Fixed
- updated cmake module to fix documentation generation
- test documentation in conda ci
2.4.2 - 2024-03-06
Fixed
- Fix CMAKE_INSTALL_{} path for installation (#543)
2.4.1 - 2024-01-23
Fixed
- CachedMeshLoader checks file last modification time.
- Fix call to clear methods for {Collision,Distance}Data inside init function (#509)
- CMake: fix submodule use in bindings in (#512)
- Fix bug in DynamicAABBTreeCollisionManager (see #514) in (#515)
Added
- In struct Contact
- Documentation of the members,
- initialization of normal, closest points and contact point in constructors
- method getDistanceToCollision
- New variant of GJK (PolyakAcceleration).
- Specialization of distance computation between
- Sphere and Capsule,
- Ellipsoid and Halfspace,
- Ellipsoid and Plane.
- Collision computation between Octree and HeightField.
Changed
- Matrixx3f and Matrixx3i become row major.
- Use shared pointers to vectors instead of arrays for vertices and triangles in class BVHModelBase.
Removed
- members related epa in class QueryRequest
2.4.0 - 2023-11-27
Added
- Add method to
CollisionObjectto getCollisionGeometryraw pointer
Fixed
- Fix RPATH computation on OSX
- Fix Python stubs generation on Windows
2.3.7 - 2023-11-15
What’s Changed
2.3.6 - 2023-09-30
What’s Changed
- Update ROS_DISTRO by @jcarpent (#442)
- Add citations by @jcarpent (#449)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#444)
- [WIP] Debug by @jcarpent (#455)
- CMake: require >= 3.10 by @nim65s (#453)
- core: fix SaPCollisionManager::empty() by @rujialiu (#454)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#452)
New Contributors
2.3.5 - 2023-07-11
What’s Changed
- Fix compilation warning by @jcarpent (#434)
- Fix parsing of doxygen doc by @jcarpent (#439)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#438)
2.3.4 - 2023-06-01
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#414)
- Fix conversion warning by @wxmerkt (#417)
- Add missing boost include by @nim65s (#418)
- ci: update macos-linux-pip by @nim65s (#419)
- Modernize Cmake use by @nim65s (#420)
- tests: use boost::filesystem by @nim65s (#424)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#425)
- Update minimal Python version by @jcarpent (#427)
- Sync submodule cmake by @jcarpent (#430)
- Sync submodule CMake by @jcarpent (#431)
2.3.3 - 2023-05-09
What’s Changed
2.3.2 - 2023-04-27
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#391)
- Sync submodule cmake by @jcarpent (#393)
- Topic/rpath by @nim65s (#394)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#396)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#399)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#402)
- Sync submodule cmake by @jcarpent (#406)
2.3.1 - 2023-03-25
What’s Changed
- Remove useless call to /proc/cpuinfo by @jcarpent (#385)
- Add pip CI by @nim65s (#386)
- [GJKSolver] Fix missing switch case in result status of GJK by @lmontaut (#387)
- Sync submodule cmake by @jcarpent (#388)
2.3.0 - 2023-03-17
What’s Changed
- [CI] Remove EOL Galactic by @wxmerkt (#366)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#367)
- Sync submodule cmake by @jcarpent (#368)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#369)
- Adding EarlyStopped flag in GJK by @lmontaut (#371)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#373)
- Update CI by @jcarpent (#374)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#375)
- Skip test if BUILD_TESTING is OFF by @jcarpent (#378)
2.2.0 - 2022-12-12
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#358)
- Extract checks if AABB overlap by @jmirabel (#360)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#361)
- Sync submodule CMake by @jcarpent (#362)
- Add support of Pickling by @jcarpent (#363)
2.1.4 - 2022-10-24
What’s Changed
- Sync submodule CMake by @jcarpent (#352)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#353)
2.1.3 - 2022-09-13
What’s Changed
- Minor boost cleanup by @pantor (#331)
- [CI] Activate ROS2 configurations by @wxmerkt (#332)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#337)
- Sync submodule cmake by @jcarpent (#341)
- Fix shapeIntersect when for EPA FallBack by @jcarpent (#342)
- Fix findAssimp on Windows by @jcarpent (#345)
- Sync submodule cmake by @jcarpent (#347)
New Contributors
2.1.2 - 2022-08-01
What’s Changed
- core: add EPA::FallBack condition to shapeDistance computation by @lmontaut (#325)
- CMake: update to eigenpy 2.7.10 by @nim65s (#327)
2.1.1 - 2022-07-25
What’s Changed
- cmake: relocatable package for recent CMake versions by @nim65s (#319)
- ROS2/Colcon integration by @wxmerkt (#321)
2.1.0 - 2022-07-13
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#288)
- Add enum helpers by @jcarpent (#290)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#294)
- Ellipsoids in collision & distance matrices by @lmontaut (#295)
- doc: simplex projection in GJK class. by @lmontaut (#296)
- Feature: Nesterov acceleration for GJK by @lmontaut (#289)
- Add more testing to broadphase by @jcarpent (#298)
- Feature: adding convergence criterions for GJK algorithm by @lmontaut (#299)
- Sync submodule cmake by @jcarpent (#300)
- Reorder triangles when computing convex hulls by @lmontaut (#301)
- Exposing gjk utils by @lmontaut (#302)
- Fix assert precision in GJK by @jcarpent (#304)
- Simplify GJKSolver settings by @jcarpent (#305)
- Add CollisionResult::nearest_points by @jcarpent (#303)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#306)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#309)
- Fix minimal value for GJK::distance_upper_bound by @jcarpent (#310)
- Fix incoherent overlap by @jcarpent (#311)
- Expose shared_ptr
by [@Jiayuan-Gu](https://github.com/Jiayuan-Gu) ([#314](https://github.com/humanoid-path-planner/hpp-fcl/pull/314)) - test/gjk_convergence_criterion: Add check on GJK::Status by @wxmerkt (#315)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#316)
- Handle negative security margin by @jcarpent (#312)
New Contributors
- @Jiayuan-Gu made their first contribution (#314)
2.0.1 - 2022-04-15
This PR mainly fixes packaging issues and removes compilation warnings.
What’s Changed
- Zero warnings by @wxmerkt (#282)
- Sync submodule cmake by @jcarpent (#283)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#284)
- Activate python3-pylatexenc dependency by @wxmerkt (#286)
- Comment pylatexenc again since it’s not available on the buildfarm by @wxmerkt (#287)
New Contributors
- @pre-commit-ci made their first contribution (#284)
2.0.0 - 2022-04-06
This new release reintroduces the full support of Broad phase within hpp-fcl while also enforcing C++11 as minimal standard.
What’s Changed
- Add Ellipsoid by @jcarpent (#259)
- Removing comment about inflation. by @lmontaut (#261)
- Reintroduce broadphase by @jcarpent (#260)
- Simplify CollisionObject by removing cgeom_const by @jcarpent (#263)
- Address some warnings by @wxmerkt (#262)
- Fix missing copy of aabb_local in CollisionGeometry by @jcarpent (#264)
- use std::shared_ptr, fix #218 by @nim65s (#266)
- Fix broadphase warnings for clang (some conversion remain for g++) by @wxmerkt (#268)
- [ComputeCollision] Return no collision if security_margin is set to -inf by @florent-lamiraux (#271)
- tests: remove link to boost unit test framework by @nim65s (#270)
- Fix computation of aabb_center by @jcarpent (#273)
- Add operator== and operator!= to CollisionGeometry by @jcarpent (#274)
- Merge pull request #276 from humanoid-path-planner/patch-release-1.8.1 by @jcarpent (#277)
- Fix some missing features in base classes by @jcarpent (#275)
- Add operator{==,!=} to CollisionObject by @jcarpent (#278)
- Configure and apply pre-commit by @jcarpent (#280)
- Fix DistanceCallBackBaseWrapper by @jcarpent (#281)
New Contributors
1.8.1 - 2022-03-20
What’s Changed
1.8.0 - 2022-02-08
What’s Changed
- [CMake] Qhull is a private dependency by @nim65s (#247)
- Remove useless warnings by @jcarpent (#248)
- fix submodule url by @nim65s (#246)
- Remove warnings and add missing noalias by @jcarpent (#249)
- Function makeOctree returns a shared pointer by @florent-lamiraux (#254)
- Add support of HeightField by @jcarpent (#251)
- [OcTree] Add method to save octree in obj file. by @florent-lamiraux (#256)
- Fix C++98 compatibility by @jcarpent (#258)
1.7.8 - 2021-10-30
What’s Changed
- Fix conversion by @jcarpent (#242)
- Fix exposition of vertices by @jcarpent (#243)
- Enhance Convex exposition by @jcarpent (#244)
- Sync submodule cmake by @jcarpent (#245)
1.7.7 - 2021-09-13
This new release fixes several bugs within the framework.
1.7.6 - 2021-09-08
This new release improves the packaging of the project and integrates the Stub generation of Python bindings.
1.7.5 - 2021-07-30
This new release provides extended API exposition in Python, removes some code related to CDD while also trying to rely on the QHULL version present on the system.
1.7.4 - 2021-06-11
This release fixes several bugs:
- correct update of the distance lower bound
- fix memory footprint computation
while also removing the support of Travis CI.
1.7.3 - 2021-05-26
This new release provides:
- fixes of LINE and POINTS when loading meshes with assimp
- removing of various warnings
- computation of memory footprint for geometries
1.7.2 - 2021-04-19
This new release improves the loading of meshes using Assimp by automatically removing degenerated LINES and POINTS.
1.7.1 - 2021-04-02
This new release reduces the impact of timers on the computations. This should be used with care and can be enabled by setting the correct flag to true in the QueryRequest.
1.7.0 - 2021-03-31
This new release provides:
- extended support for serialization
- timing of the collision/distance computations
- helpers to build octree
- various bug fixes and interface improvements
1.6.0 - 2020-10-06
This new release provides:
- functors for evaluating Collision and Distances (faster call)
- extended support of v142 compiler
- support of collision check between HalfSpace and Convex shapes
- improvement of GJK solver
- fixes on Python bindings
1.5.4 - 2020-09-22
In this new release, the support of collision checking between Convex objects and HalfSpace have been enhanced and some minor fixes have been provided.
1.5.3 - 2020-08-31
This new release provides better CMake packaging and improved GJK algorithms.
1.5.2 - 2020-08-15
This release improves the packaging of the project and provides fixes for the GJK solver.
1.5.1 - 2020-08-06
This new release fixes packaging issues with precedent release 1.5.0. It also provides additional fixes in main collision/distance algorithms.
1.4.6 - 2020-06-10
This new release enhances the packaging of the project and allows the compilation of FCL on Windows systems.
1.4.5 - 2020-06-03
Changes in v1.4.5:
- Fix Python 3 doc generation
- Fix packaging of the project
- Compilation on Windows.
- [CMake] Install missing header.
- Add collide and distance prototype that update the GJK guess.
- Add support function cached guess in queries and merge query attribute.
- Add function to generate the convex hull.
- Add hint to the support function + Fix usage of GJK guess.
- [Python] Add constructor for class Convex.
- [Python] Bind functions to create BVHModel.
1.4.4 - 2020-04-29
Changes in 1.4.4:
- add MeshLoader::loadOctree
- fix generation of XML documentation
- fix generation of Doxygen documentation
1.4.3 - 2020-04-08
This new release fixes some packagings issues for OS X systems.
1.4.2 - 2020-04-04
Changes in v1.4.2:
- don’t require linking to eigenpy in .pc file.
1.4.1 - 2020-04-03
Changes in v1.4.1:
- Bug fix + prepare optimization of collision using GJK / EPA
- Add missing constructor for Transform3f
1.4.0 - 2020-04-03
Changes since v1.3.0:
- Improve code efficiency + use shared memory between Numpy and Eigen
- [Python] Doc and minor update + [C++] bugfix
- [Python] Fix bindings of CollisionResult.
- FIX: throw when no contact is available
- Minor fix and computational improvments
- [GJK/EPA] Fix bugs + Treat sphere as point and capsule as line segment.
- Fix boxSphereDistance
- Provide documentation for the Python bindings.
- Generate Python documentation from doxygen documentation.
- Fix issue when Python_EXECUTABLE is not defined
- update CMake packaging
1.3.0 - 2020-01-28
This new release comes with:
- the removing of the GJK solver
- the Python bindings build by default
- an improved documentation
- additional Python bindings
1.2.2 - 2019-12-17
This new Release improves the Python bindings and fixes an important bug when checking the collision between two Capsules.
Thanks to @rstrudel for this fix.
1.2.1 - 2019-12-09
This new release improves both the packaging of the project, which seems to be totally compatible with the new CMake linkage style. In addition, the bindings are now fully compatible with Pinocchio.
1.2.0 - 2019-11-22
Changes since v1.1.3:
- Add python bindings
- Update CMake
- Add version support
- New folder Internal for internal header
- Travis: update CI & change policy to only perform build in DEBUG mode on Bionic
- assimp: fix issue with recent version of assimp
- [bindings] [CMakeLists] Use .so for Mac and .pyd for Windows, fix #86
- Organize documentation
- [CMake] fix octomap detection
- [Minor] update CMake module + fix visibility of some methods.
- Enable Convex / Convex queries + Add Python bindings.
- Fix unit-tests and compilation
- [GJK] Fix GJK::encloseOrigin (fixes unit-tests)
- Improve GJK implementation + OBB overlap test + bug fixes
- Clean include BV/BVH/math/mesh_loader
1.1.3 - 2019-08-07
This new release enhances the compatibility of hpp-fcl with C++14 and more. This feature is requested for integration in Anaconda.
1.1.2 - 2019-08-05
This new release provides a fix in the parallelization of the computations and improves the packaging of the whole project.
1.0.2 - 2019-04-24
Changes since v1.0.1:
- obb: fix compatibility with Eigen 3.0.5
- [CI] octomap for osx
1.0.1 - 2019-02-20
- Fix CI on OSX
- Declare CachedMeshLoader::Key::operator<
- minor details
0.7.0 - 2019-01-31
This release is mainly here to allow the packaging of HPP-RBPRM. Another release will follow with more news.
0.6.0 - 2018-10-22
- Fix bug when OCTOMAP is not found
- move buildTrianglePlane and clipTriangle method from private to public
- Fix bug with “" symbols
- [CMake] Add flags related to Octomap in pkg-config file and remove FCL_HAVE_EIGEN
0.5.1 - 2017-10-02
Now Eigen is at the heart of linear algebra computations.
0.5 - 2017-03-17
First release
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged hpp-fcl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | BSD |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2024-10-10 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Wolfgang Merkt
Authors
HPP-FCL — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015. Since then, a large part of the code has been rewritten or removed (for the unused and untested part). The broad phase was reintroduced by Justin Carpentier in 2022 based on the FCL version 0.7.0.
If you use HPP-FCL in your projects and research papers, we would appreciate it if you’d cite it.
New features
Compared to the original FCL library, the main new features are:
- a dedicated and efficient implementation of the GJK algorithm (we do not rely anymore on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performances (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
This project is now used in many robotics frameworks such as Pinocchio, an open-source software that implements efficient and versatile rigid body dynamics algorithms, the Humanoid Path Planner, an open-source software for Motion and Manipulation Planning. HPP-FCL has also been recently used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, HPP-FCL implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performances, as depicted by the figures below.
On the one hand, we have benchmarked HPP-FCL against major software alternatives of the state of the art:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why.
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Pinocchio
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install hpp-fcl.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using HPP-FCL in C++:
#include "hpp/fcl/math/transform.h"
#include "hpp/fcl/mesh_loader/loader.h"
#include "hpp/fcl/BVH/BVH_model.h"
#include "hpp/fcl/collision.h"
#include "hpp/fcl/collision_data.h"
#include <iostream>
#include <memory>
// Function to load a convex mesh from a `.obj`, `.stl` or `.dae` file.
//
// This function imports the object inside the file as a BVHModel, i.e. a point cloud
// which is hierarchically transformed into a tree of bounding volumes.
// The leaves of this tree are the individual points of the point cloud
// stored in the `.obj` file.
// This BVH can then be used for collision detection.
//
// For better computational efficiency, we sometimes prefer to work with
// the convex hull of the point cloud. This insures that the underlying object
// is convex and thus very fast collision detection algorithms such as
// GJK or EPA can be called with this object.
// Consequently, after creating the BVH structure from the point cloud, this function
// also computes its convex hull.
std::shared_ptr<hpp::fcl::ConvexBase> loadConvexMesh(const std::string& file_name) {
hpp::fcl::NODE_TYPE bv_type = hpp::fcl::BV_AABB;
hpp::fcl::MeshLoader loader(bv_type);
hpp::fcl::BVHModelPtr_t bvh = loader.load(file_name);
bvh->buildConvexHull(true, "Qt");
return bvh->convex;
}
int main() {
// Create the hppfcl shapes.
// Hppfcl supports many primitive shapes: boxes, spheres, capsules, cylinders, ellipsoids, cones, planes,
// halfspace and convex meshes (i.e. convex hulls of clouds of points).
// It also supports BVHs (bounding volumes hierarchies), height-fields and octrees.
std::shared_ptr<hpp::fcl::Ellipsoid> shape1 = std::make_shared<hpp::fcl::Ellipsoid>(0.7, 1.0, 0.8);
std::shared_ptr<hpp::fcl::ConvexBase> shape2 = loadConvexMesh("../path/to/mesh/file.obj");
// Define the shapes' placement in 3D space
hpp::fcl::Transform3f T1;
T1.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T1.setTranslation(hpp::fcl::Vec3f::Random());
hpp::fcl::Transform3f T2 = hpp::fcl::Transform3f::Identity();
T2.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T2.setTranslation(hpp::fcl::Vec3f::Random());
// Define collision requests and results.
//
// The collision request allows to set parameters for the collision pair.
// For example, we can set a positive or negative security margin.
// If the distance between the shapes is less than the security margin, the shapes
// will be considered in collision.
// Setting a positive security margin can be usefull in motion planning,
// i.e to prevent shapes from getting too close to one another.
// In physics simulation, allowing a negative security margin may be usefull to stabilize the simulation.
hpp::fcl::CollisionRequest col_req;
col_req.security_margin = 1e-1;
// A collision result stores the result of the collision test (signed distance between the shapes,
// witness points location, normal etc.)
hpp::fcl::CollisionResult col_res;
// Collision call
hpp::fcl::collide(shape1.get(), T1, shape2.get(), T2, col_req, col_res);
// We can access the collision result once it has been populated
std::cout << "Collision? " << col_res.isCollision() << "\n";
if (col_res.isCollision()) {
hpp::fcl::Contact contact = col_res.getContact(0);
// The penetration depth does **not** take into account the security margin.
// Consequently, the penetration depth is the true signed distance which separates the shapes.
// To have the distance which takes into account the security margin, we can simply add the two together.
std::cout << "Penetration depth: " << contact.penetration_depth << "\n";
std::cout << "Distance between the shapes including the security margin: " << contact.penetration_depth + col_req.security_margin << "\n";
std::cout << "Witness point on shape1: " << contact.nearest_points[0].transpose() << "\n";
std::cout << "Witness point on shape2: " << contact.nearest_points[1].transpose() << "\n";
std::cout << "Normal: " << contact.normal.transpose() << "\n";
}
// Before calling another collision test, it is important to clear the previous results stored in the collision result.
col_res.clear();
return 0;
}
Python example
Here is the C++ example from above translated in python using HPP-FCL’s python bindings:
import numpy as np
import hppfcl
# Optional:
# The Pinocchio library is a rigid body algorithms library and has a handy SE3 module.
# It can be installed as simply as `conda -c conda-forge install pinocchio`.
# Installing pinocchio also installs hpp-fcl.
import pinocchio as pin
def loadConvexMesh(file_name: str):
loader = hppfcl.MeshLoader()
bvh: hppfcl.BVHModelBase = loader.load(file_name)
bvh.buildConvexHull(True, "Qt")
return bvh.convex
if __name__ == "__main__":
# Create hppfcl shapes
shape1 = hppfcl.Ellipsoid(0.7, 1.0, 0.8)
shape2 = loadConvexMesh("../path/to/mesh/file.obj")
# Define the shapes' placement in 3D space
T1 = hppfcl.Transform3f()
T1.setTranslation(pin.SE3.Random().translation)
T1.setRotation(pin.SE3.Random().rotation)
T2 = hppfcl.Transform3f();
# Using np arrays also works
T1.setTranslation(np.random.rand(3))
T2.setRotation(pin.SE3.Random().rotation)
# Define collision requests and results
col_req = hppfcl.CollisionRequest()
col_res = hppfcl.CollisionResult()
# Collision call
hppfcl.collide(shape1, T1, shape2, T2, col_req, col_res)
# Accessing the collision result once it has been populated
print("Is collision? ", {col_res.isCollision()})
if col_res.isCollision():
contact: hppfcl.Contact = col_res.getContact(0)
print("Penetration depth: ", contact.penetration_depth)
print("Distance between the shapes including the security margin: ", contact.penetration_depth + col_req.security_margin)
print("Witness point shape1: ", contact.getNearestPoint1())
print("Witness point shape2: ", contact.getNearestPoint2())
print("Normal: ", contact.normal)
# Before running another collision call, it is important to clear the old one
col_res.clear()
Acknowledgments
The development of HPP-FCL is actively supported by the Gepetto team @LAAS-CNRS, the Willow team @INRIA and, to some extend, Eureka Robotics.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Added
Transform3f::RandomandTransform3f::setRandom(#584) - New feature: computation of contact surfaces for any pair of primitive shapes (triangle, sphere, ellipsoid, plane, halfspace, cone, capsule, cylinder, convex) (#574).
- Enhance Broadphase DynamicAABBTree to better handle planes and halfspace (#570)
-
#558:
- [internal] Removed dead code in
narrowphase/details.h(#558) - [internal] Removed specializations of methods of
GJKSolver. Now the specializations are all handled byShapeShapeDistanceinshape_shape_func.h. - [new feature] Added support for Swept-Sphere primitives (sphere, box, capsule, cone, ellipsoid, triangle, halfspace, plane, convex mesh).
- [internal] Removed dead code in
- [API change] Renamed default convergence criterion from
VDBtoDefault(#556) - Fixed EPA returning nans on cases where it could return an estimate of the normal and penetration depth. (#556)
- Fixed too low tolerance in GJK/EPA asserts (#554)
- Fixed
normal_and_nearest_pointstest (no need to have Eigen 3.4) (#553) - #549
- Optimize EPA: ignore useless faces in EPA’s polytope; warm-start support computation for
Convex; fix edge-cases witness points computation. - Add
Serializabletrait to transform, collision data, collision geometries, bounding volumes, bvh models, hfields. Collision problems can now be serialized from C++ and sent to python and vice versa. - CMake: allow use of installed jrl-cmakemodules (#564)
- Python: add id() support for geometries (#618).
Fixed
- Fix Fix serialization unit test when running without Qhull support (#611)
- Compiler warnings (#601, #605)
- CMake: fix assimp finder
- Don’t define GCC7 Boost serialization hack when
HPP_FCL_SKIP_EIGEN_BOOST_SERIALIZATIONis defined (#530) - Default parameters for narrowphase algorithms (GJK and EPA); fixed assertion checks that were sometimes failing in GJK simplex projection and BVH
collide(#531). - Created a new macro
HPP_FCL_ASSERTwhich behaves as an assert by default. When the optionHPP_FCL_TURN_ASSERT_INTO_EXCEPTIONis turned on, it replaces the macro by an exception (#533). Also fixed an EPA assert inGJKSolver. - Simplify internals of hpp-fcl (#535):
- Computing distance between 2 primitives shapes does not use a traversal node anymore.
- Removed successive mallocs in GJK/EPA when using an instance of
GJKSolvermultiple times. -
GJKSolvernow deals with all statuses of GJK/EPA. Some of these statuses represent a bad behavior of GJK/EPA and now trigger an assertion in Debug mode. Usefull for debugging these algos. - Logging was added with macros like
HPP_FCL_LOG_(INFO/DEBUG/WARNING/ERROR); hpp-fcl can now log usefull info when the preprocessor optionHPP_FCL_ENABLE_LOGGINGis enabled. - Deprecated
enable_distance_lower_boundinCollisionRequest; a lower bound on distance is always computed. - Deprecated
enable_nearest_pointsinDistanceRequest; they are always computed and are the points of the shapes that achieve a distance ofDistanceResult::min_distance. - Added
enable_signed_distanceflag inDistanceRequest(defaulttrue). Turn this of for better performance if only the distance when objects are disjoint is needed. - The internal collision and distance functions of hpp-fcl now use
CollisionRequest::enable_contactandDistanceRequest::enable_signed_distanceto control whether or not penetration information should be computed. There are many scenarios where we don’t need the penetration information and only want to know if objects are colliding and compute their distance only if they are disjoint. These flags allow the user to control the trade-off between performance vs. information of the library. - Fix convergence criterion of EPA; made GJK and EPA convergence criterion absolute + relative to scale to the shapes’ dimensions; remove max face/vertices fields from EPA (these can be deduced from the max number of iterations)
- Account for lateral borders in Height Fields model.
- Fix compilation error on recent APPLE compilers (#539).
- Fix printing of deprecated message (#540).
- Fix compilation with earlier Eigen version
- Fix compilation warning message
- Fix issue in Octomap.computeLocalAABB
- Fix unsupported function for contact_patch_matrix
- Fix Octomap dependency on ROS
2.4.5 - 2024-07-28
Fixed
- Fix Octomap dependency on ROS
2.4.4 - 2024-03-06
2.4.3 - 2024-03-06
Fixed
- updated cmake module to fix documentation generation
- test documentation in conda ci
2.4.2 - 2024-03-06
Fixed
- Fix CMAKE_INSTALL_{} path for installation (#543)
2.4.1 - 2024-01-23
Fixed
- CachedMeshLoader checks file last modification time.
- Fix call to clear methods for {Collision,Distance}Data inside init function (#509)
- CMake: fix submodule use in bindings in (#512)
- Fix bug in DynamicAABBTreeCollisionManager (see #514) in (#515)
Added
- In struct Contact
- Documentation of the members,
- initialization of normal, closest points and contact point in constructors
- method getDistanceToCollision
- New variant of GJK (PolyakAcceleration).
- Specialization of distance computation between
- Sphere and Capsule,
- Ellipsoid and Halfspace,
- Ellipsoid and Plane.
- Collision computation between Octree and HeightField.
Changed
- Matrixx3f and Matrixx3i become row major.
- Use shared pointers to vectors instead of arrays for vertices and triangles in class BVHModelBase.
Removed
- members related epa in class QueryRequest
2.4.0 - 2023-11-27
Added
- Add method to
CollisionObjectto getCollisionGeometryraw pointer
Fixed
- Fix RPATH computation on OSX
- Fix Python stubs generation on Windows
2.3.7 - 2023-11-15
What’s Changed
2.3.6 - 2023-09-30
What’s Changed
- Update ROS_DISTRO by @jcarpent (#442)
- Add citations by @jcarpent (#449)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#444)
- [WIP] Debug by @jcarpent (#455)
- CMake: require >= 3.10 by @nim65s (#453)
- core: fix SaPCollisionManager::empty() by @rujialiu (#454)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#452)
New Contributors
2.3.5 - 2023-07-11
What’s Changed
- Fix compilation warning by @jcarpent (#434)
- Fix parsing of doxygen doc by @jcarpent (#439)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#438)
2.3.4 - 2023-06-01
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#414)
- Fix conversion warning by @wxmerkt (#417)
- Add missing boost include by @nim65s (#418)
- ci: update macos-linux-pip by @nim65s (#419)
- Modernize Cmake use by @nim65s (#420)
- tests: use boost::filesystem by @nim65s (#424)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#425)
- Update minimal Python version by @jcarpent (#427)
- Sync submodule cmake by @jcarpent (#430)
- Sync submodule CMake by @jcarpent (#431)
2.3.3 - 2023-05-09
What’s Changed
2.3.2 - 2023-04-27
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#391)
- Sync submodule cmake by @jcarpent (#393)
- Topic/rpath by @nim65s (#394)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#396)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#399)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#402)
- Sync submodule cmake by @jcarpent (#406)
2.3.1 - 2023-03-25
What’s Changed
- Remove useless call to /proc/cpuinfo by @jcarpent (#385)
- Add pip CI by @nim65s (#386)
- [GJKSolver] Fix missing switch case in result status of GJK by @lmontaut (#387)
- Sync submodule cmake by @jcarpent (#388)
2.3.0 - 2023-03-17
What’s Changed
- [CI] Remove EOL Galactic by @wxmerkt (#366)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#367)
- Sync submodule cmake by @jcarpent (#368)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#369)
- Adding EarlyStopped flag in GJK by @lmontaut (#371)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#373)
- Update CI by @jcarpent (#374)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#375)
- Skip test if BUILD_TESTING is OFF by @jcarpent (#378)
2.2.0 - 2022-12-12
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#358)
- Extract checks if AABB overlap by @jmirabel (#360)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#361)
- Sync submodule CMake by @jcarpent (#362)
- Add support of Pickling by @jcarpent (#363)
2.1.4 - 2022-10-24
What’s Changed
- Sync submodule CMake by @jcarpent (#352)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#353)
2.1.3 - 2022-09-13
What’s Changed
- Minor boost cleanup by @pantor (#331)
- [CI] Activate ROS2 configurations by @wxmerkt (#332)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#337)
- Sync submodule cmake by @jcarpent (#341)
- Fix shapeIntersect when for EPA FallBack by @jcarpent (#342)
- Fix findAssimp on Windows by @jcarpent (#345)
- Sync submodule cmake by @jcarpent (#347)
New Contributors
2.1.2 - 2022-08-01
What’s Changed
- core: add EPA::FallBack condition to shapeDistance computation by @lmontaut (#325)
- CMake: update to eigenpy 2.7.10 by @nim65s (#327)
2.1.1 - 2022-07-25
What’s Changed
- cmake: relocatable package for recent CMake versions by @nim65s (#319)
- ROS2/Colcon integration by @wxmerkt (#321)
2.1.0 - 2022-07-13
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#288)
- Add enum helpers by @jcarpent (#290)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#294)
- Ellipsoids in collision & distance matrices by @lmontaut (#295)
- doc: simplex projection in GJK class. by @lmontaut (#296)
- Feature: Nesterov acceleration for GJK by @lmontaut (#289)
- Add more testing to broadphase by @jcarpent (#298)
- Feature: adding convergence criterions for GJK algorithm by @lmontaut (#299)
- Sync submodule cmake by @jcarpent (#300)
- Reorder triangles when computing convex hulls by @lmontaut (#301)
- Exposing gjk utils by @lmontaut (#302)
- Fix assert precision in GJK by @jcarpent (#304)
- Simplify GJKSolver settings by @jcarpent (#305)
- Add CollisionResult::nearest_points by @jcarpent (#303)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#306)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#309)
- Fix minimal value for GJK::distance_upper_bound by @jcarpent (#310)
- Fix incoherent overlap by @jcarpent (#311)
- Expose shared_ptr
by [@Jiayuan-Gu](https://github.com/Jiayuan-Gu) ([#314](https://github.com/humanoid-path-planner/hpp-fcl/pull/314)) - test/gjk_convergence_criterion: Add check on GJK::Status by @wxmerkt (#315)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#316)
- Handle negative security margin by @jcarpent (#312)
New Contributors
- @Jiayuan-Gu made their first contribution (#314)
2.0.1 - 2022-04-15
This PR mainly fixes packaging issues and removes compilation warnings.
What’s Changed
- Zero warnings by @wxmerkt (#282)
- Sync submodule cmake by @jcarpent (#283)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#284)
- Activate python3-pylatexenc dependency by @wxmerkt (#286)
- Comment pylatexenc again since it’s not available on the buildfarm by @wxmerkt (#287)
New Contributors
- @pre-commit-ci made their first contribution (#284)
2.0.0 - 2022-04-06
This new release reintroduces the full support of Broad phase within hpp-fcl while also enforcing C++11 as minimal standard.
What’s Changed
- Add Ellipsoid by @jcarpent (#259)
- Removing comment about inflation. by @lmontaut (#261)
- Reintroduce broadphase by @jcarpent (#260)
- Simplify CollisionObject by removing cgeom_const by @jcarpent (#263)
- Address some warnings by @wxmerkt (#262)
- Fix missing copy of aabb_local in CollisionGeometry by @jcarpent (#264)
- use std::shared_ptr, fix #218 by @nim65s (#266)
- Fix broadphase warnings for clang (some conversion remain for g++) by @wxmerkt (#268)
- [ComputeCollision] Return no collision if security_margin is set to -inf by @florent-lamiraux (#271)
- tests: remove link to boost unit test framework by @nim65s (#270)
- Fix computation of aabb_center by @jcarpent (#273)
- Add operator== and operator!= to CollisionGeometry by @jcarpent (#274)
- Merge pull request #276 from humanoid-path-planner/patch-release-1.8.1 by @jcarpent (#277)
- Fix some missing features in base classes by @jcarpent (#275)
- Add operator{==,!=} to CollisionObject by @jcarpent (#278)
- Configure and apply pre-commit by @jcarpent (#280)
- Fix DistanceCallBackBaseWrapper by @jcarpent (#281)
New Contributors
1.8.1 - 2022-03-20
What’s Changed
1.8.0 - 2022-02-08
What’s Changed
- [CMake] Qhull is a private dependency by @nim65s (#247)
- Remove useless warnings by @jcarpent (#248)
- fix submodule url by @nim65s (#246)
- Remove warnings and add missing noalias by @jcarpent (#249)
- Function makeOctree returns a shared pointer by @florent-lamiraux (#254)
- Add support of HeightField by @jcarpent (#251)
- [OcTree] Add method to save octree in obj file. by @florent-lamiraux (#256)
- Fix C++98 compatibility by @jcarpent (#258)
1.7.8 - 2021-10-30
What’s Changed
- Fix conversion by @jcarpent (#242)
- Fix exposition of vertices by @jcarpent (#243)
- Enhance Convex exposition by @jcarpent (#244)
- Sync submodule cmake by @jcarpent (#245)
1.7.7 - 2021-09-13
This new release fixes several bugs within the framework.
1.7.6 - 2021-09-08
This new release improves the packaging of the project and integrates the Stub generation of Python bindings.
1.7.5 - 2021-07-30
This new release provides extended API exposition in Python, removes some code related to CDD while also trying to rely on the QHULL version present on the system.
1.7.4 - 2021-06-11
This release fixes several bugs:
- correct update of the distance lower bound
- fix memory footprint computation
while also removing the support of Travis CI.
1.7.3 - 2021-05-26
This new release provides:
- fixes of LINE and POINTS when loading meshes with assimp
- removing of various warnings
- computation of memory footprint for geometries
1.7.2 - 2021-04-19
This new release improves the loading of meshes using Assimp by automatically removing degenerated LINES and POINTS.
1.7.1 - 2021-04-02
This new release reduces the impact of timers on the computations. This should be used with care and can be enabled by setting the correct flag to true in the QueryRequest.
1.7.0 - 2021-03-31
This new release provides:
- extended support for serialization
- timing of the collision/distance computations
- helpers to build octree
- various bug fixes and interface improvements
1.6.0 - 2020-10-06
This new release provides:
- functors for evaluating Collision and Distances (faster call)
- extended support of v142 compiler
- support of collision check between HalfSpace and Convex shapes
- improvement of GJK solver
- fixes on Python bindings
1.5.4 - 2020-09-22
In this new release, the support of collision checking between Convex objects and HalfSpace have been enhanced and some minor fixes have been provided.
1.5.3 - 2020-08-31
This new release provides better CMake packaging and improved GJK algorithms.
1.5.2 - 2020-08-15
This release improves the packaging of the project and provides fixes for the GJK solver.
1.5.1 - 2020-08-06
This new release fixes packaging issues with precedent release 1.5.0. It also provides additional fixes in main collision/distance algorithms.
1.4.6 - 2020-06-10
This new release enhances the packaging of the project and allows the compilation of FCL on Windows systems.
1.4.5 - 2020-06-03
Changes in v1.4.5:
- Fix Python 3 doc generation
- Fix packaging of the project
- Compilation on Windows.
- [CMake] Install missing header.
- Add collide and distance prototype that update the GJK guess.
- Add support function cached guess in queries and merge query attribute.
- Add function to generate the convex hull.
- Add hint to the support function + Fix usage of GJK guess.
- [Python] Add constructor for class Convex.
- [Python] Bind functions to create BVHModel.
1.4.4 - 2020-04-29
Changes in 1.4.4:
- add MeshLoader::loadOctree
- fix generation of XML documentation
- fix generation of Doxygen documentation
1.4.3 - 2020-04-08
This new release fixes some packagings issues for OS X systems.
1.4.2 - 2020-04-04
Changes in v1.4.2:
- don’t require linking to eigenpy in .pc file.
1.4.1 - 2020-04-03
Changes in v1.4.1:
- Bug fix + prepare optimization of collision using GJK / EPA
- Add missing constructor for Transform3f
1.4.0 - 2020-04-03
Changes since v1.3.0:
- Improve code efficiency + use shared memory between Numpy and Eigen
- [Python] Doc and minor update + [C++] bugfix
- [Python] Fix bindings of CollisionResult.
- FIX: throw when no contact is available
- Minor fix and computational improvments
- [GJK/EPA] Fix bugs + Treat sphere as point and capsule as line segment.
- Fix boxSphereDistance
- Provide documentation for the Python bindings.
- Generate Python documentation from doxygen documentation.
- Fix issue when Python_EXECUTABLE is not defined
- update CMake packaging
1.3.0 - 2020-01-28
This new release comes with:
- the removing of the GJK solver
- the Python bindings build by default
- an improved documentation
- additional Python bindings
1.2.2 - 2019-12-17
This new Release improves the Python bindings and fixes an important bug when checking the collision between two Capsules.
Thanks to @rstrudel for this fix.
1.2.1 - 2019-12-09
This new release improves both the packaging of the project, which seems to be totally compatible with the new CMake linkage style. In addition, the bindings are now fully compatible with Pinocchio.
1.2.0 - 2019-11-22
Changes since v1.1.3:
- Add python bindings
- Update CMake
- Add version support
- New folder Internal for internal header
- Travis: update CI & change policy to only perform build in DEBUG mode on Bionic
- assimp: fix issue with recent version of assimp
- [bindings] [CMakeLists] Use .so for Mac and .pyd for Windows, fix #86
- Organize documentation
- [CMake] fix octomap detection
- [Minor] update CMake module + fix visibility of some methods.
- Enable Convex / Convex queries + Add Python bindings.
- Fix unit-tests and compilation
- [GJK] Fix GJK::encloseOrigin (fixes unit-tests)
- Improve GJK implementation + OBB overlap test + bug fixes
- Clean include BV/BVH/math/mesh_loader
1.1.3 - 2019-08-07
This new release enhances the compatibility of hpp-fcl with C++14 and more. This feature is requested for integration in Anaconda.
1.1.2 - 2019-08-05
This new release provides a fix in the parallelization of the computations and improves the packaging of the whole project.
1.0.2 - 2019-04-24
Changes since v1.0.1:
- obb: fix compatibility with Eigen 3.0.5
- [CI] octomap for osx
1.0.1 - 2019-02-20
- Fix CI on OSX
- Declare CachedMeshLoader::Key::operator<
- minor details
0.7.0 - 2019-01-31
This release is mainly here to allow the packaging of HPP-RBPRM. Another release will follow with more news.
0.6.0 - 2018-10-22
- Fix bug when OCTOMAP is not found
- move buildTrianglePlane and clipTriangle method from private to public
- Fix bug with “" symbols
- [CMake] Add flags related to Octomap in pkg-config file and remove FCL_HAVE_EIGEN
0.5.1 - 2017-10-02
Now Eigen is at the heart of linear algebra computations.
0.5 - 2017-03-17
First release
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged hpp-fcl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | BSD |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2024-10-10 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Wolfgang Merkt
Authors
HPP-FCL — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015. Since then, a large part of the code has been rewritten or removed (for the unused and untested part). The broad phase was reintroduced by Justin Carpentier in 2022 based on the FCL version 0.7.0.
If you use HPP-FCL in your projects and research papers, we would appreciate it if you’d cite it.
New features
Compared to the original FCL library, the main new features are:
- a dedicated and efficient implementation of the GJK algorithm (we do not rely anymore on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performances (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
This project is now used in many robotics frameworks such as Pinocchio, an open-source software that implements efficient and versatile rigid body dynamics algorithms, the Humanoid Path Planner, an open-source software for Motion and Manipulation Planning. HPP-FCL has also been recently used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, HPP-FCL implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performances, as depicted by the figures below.
On the one hand, we have benchmarked HPP-FCL against major software alternatives of the state of the art:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why.
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Pinocchio
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install hpp-fcl.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using HPP-FCL in C++:
#include "hpp/fcl/math/transform.h"
#include "hpp/fcl/mesh_loader/loader.h"
#include "hpp/fcl/BVH/BVH_model.h"
#include "hpp/fcl/collision.h"
#include "hpp/fcl/collision_data.h"
#include <iostream>
#include <memory>
// Function to load a convex mesh from a `.obj`, `.stl` or `.dae` file.
//
// This function imports the object inside the file as a BVHModel, i.e. a point cloud
// which is hierarchically transformed into a tree of bounding volumes.
// The leaves of this tree are the individual points of the point cloud
// stored in the `.obj` file.
// This BVH can then be used for collision detection.
//
// For better computational efficiency, we sometimes prefer to work with
// the convex hull of the point cloud. This insures that the underlying object
// is convex and thus very fast collision detection algorithms such as
// GJK or EPA can be called with this object.
// Consequently, after creating the BVH structure from the point cloud, this function
// also computes its convex hull.
std::shared_ptr<hpp::fcl::ConvexBase> loadConvexMesh(const std::string& file_name) {
hpp::fcl::NODE_TYPE bv_type = hpp::fcl::BV_AABB;
hpp::fcl::MeshLoader loader(bv_type);
hpp::fcl::BVHModelPtr_t bvh = loader.load(file_name);
bvh->buildConvexHull(true, "Qt");
return bvh->convex;
}
int main() {
// Create the hppfcl shapes.
// Hppfcl supports many primitive shapes: boxes, spheres, capsules, cylinders, ellipsoids, cones, planes,
// halfspace and convex meshes (i.e. convex hulls of clouds of points).
// It also supports BVHs (bounding volumes hierarchies), height-fields and octrees.
std::shared_ptr<hpp::fcl::Ellipsoid> shape1 = std::make_shared<hpp::fcl::Ellipsoid>(0.7, 1.0, 0.8);
std::shared_ptr<hpp::fcl::ConvexBase> shape2 = loadConvexMesh("../path/to/mesh/file.obj");
// Define the shapes' placement in 3D space
hpp::fcl::Transform3f T1;
T1.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T1.setTranslation(hpp::fcl::Vec3f::Random());
hpp::fcl::Transform3f T2 = hpp::fcl::Transform3f::Identity();
T2.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T2.setTranslation(hpp::fcl::Vec3f::Random());
// Define collision requests and results.
//
// The collision request allows to set parameters for the collision pair.
// For example, we can set a positive or negative security margin.
// If the distance between the shapes is less than the security margin, the shapes
// will be considered in collision.
// Setting a positive security margin can be usefull in motion planning,
// i.e to prevent shapes from getting too close to one another.
// In physics simulation, allowing a negative security margin may be usefull to stabilize the simulation.
hpp::fcl::CollisionRequest col_req;
col_req.security_margin = 1e-1;
// A collision result stores the result of the collision test (signed distance between the shapes,
// witness points location, normal etc.)
hpp::fcl::CollisionResult col_res;
// Collision call
hpp::fcl::collide(shape1.get(), T1, shape2.get(), T2, col_req, col_res);
// We can access the collision result once it has been populated
std::cout << "Collision? " << col_res.isCollision() << "\n";
if (col_res.isCollision()) {
hpp::fcl::Contact contact = col_res.getContact(0);
// The penetration depth does **not** take into account the security margin.
// Consequently, the penetration depth is the true signed distance which separates the shapes.
// To have the distance which takes into account the security margin, we can simply add the two together.
std::cout << "Penetration depth: " << contact.penetration_depth << "\n";
std::cout << "Distance between the shapes including the security margin: " << contact.penetration_depth + col_req.security_margin << "\n";
std::cout << "Witness point on shape1: " << contact.nearest_points[0].transpose() << "\n";
std::cout << "Witness point on shape2: " << contact.nearest_points[1].transpose() << "\n";
std::cout << "Normal: " << contact.normal.transpose() << "\n";
}
// Before calling another collision test, it is important to clear the previous results stored in the collision result.
col_res.clear();
return 0;
}
Python example
Here is the C++ example from above translated in python using HPP-FCL’s python bindings:
import numpy as np
import hppfcl
# Optional:
# The Pinocchio library is a rigid body algorithms library and has a handy SE3 module.
# It can be installed as simply as `conda -c conda-forge install pinocchio`.
# Installing pinocchio also installs hpp-fcl.
import pinocchio as pin
def loadConvexMesh(file_name: str):
loader = hppfcl.MeshLoader()
bvh: hppfcl.BVHModelBase = loader.load(file_name)
bvh.buildConvexHull(True, "Qt")
return bvh.convex
if __name__ == "__main__":
# Create hppfcl shapes
shape1 = hppfcl.Ellipsoid(0.7, 1.0, 0.8)
shape2 = loadConvexMesh("../path/to/mesh/file.obj")
# Define the shapes' placement in 3D space
T1 = hppfcl.Transform3f()
T1.setTranslation(pin.SE3.Random().translation)
T1.setRotation(pin.SE3.Random().rotation)
T2 = hppfcl.Transform3f();
# Using np arrays also works
T1.setTranslation(np.random.rand(3))
T2.setRotation(pin.SE3.Random().rotation)
# Define collision requests and results
col_req = hppfcl.CollisionRequest()
col_res = hppfcl.CollisionResult()
# Collision call
hppfcl.collide(shape1, T1, shape2, T2, col_req, col_res)
# Accessing the collision result once it has been populated
print("Is collision? ", {col_res.isCollision()})
if col_res.isCollision():
contact: hppfcl.Contact = col_res.getContact(0)
print("Penetration depth: ", contact.penetration_depth)
print("Distance between the shapes including the security margin: ", contact.penetration_depth + col_req.security_margin)
print("Witness point shape1: ", contact.getNearestPoint1())
print("Witness point shape2: ", contact.getNearestPoint2())
print("Normal: ", contact.normal)
# Before running another collision call, it is important to clear the old one
col_res.clear()
Acknowledgments
The development of HPP-FCL is actively supported by the Gepetto team @LAAS-CNRS, the Willow team @INRIA and, to some extend, Eureka Robotics.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Added
Transform3f::RandomandTransform3f::setRandom(#584) - New feature: computation of contact surfaces for any pair of primitive shapes (triangle, sphere, ellipsoid, plane, halfspace, cone, capsule, cylinder, convex) (#574).
- Enhance Broadphase DynamicAABBTree to better handle planes and halfspace (#570)
-
#558:
- [internal] Removed dead code in
narrowphase/details.h(#558) - [internal] Removed specializations of methods of
GJKSolver. Now the specializations are all handled byShapeShapeDistanceinshape_shape_func.h. - [new feature] Added support for Swept-Sphere primitives (sphere, box, capsule, cone, ellipsoid, triangle, halfspace, plane, convex mesh).
- [internal] Removed dead code in
- [API change] Renamed default convergence criterion from
VDBtoDefault(#556) - Fixed EPA returning nans on cases where it could return an estimate of the normal and penetration depth. (#556)
- Fixed too low tolerance in GJK/EPA asserts (#554)
- Fixed
normal_and_nearest_pointstest (no need to have Eigen 3.4) (#553) - #549
- Optimize EPA: ignore useless faces in EPA’s polytope; warm-start support computation for
Convex; fix edge-cases witness points computation. - Add
Serializabletrait to transform, collision data, collision geometries, bounding volumes, bvh models, hfields. Collision problems can now be serialized from C++ and sent to python and vice versa. - CMake: allow use of installed jrl-cmakemodules (#564)
- Python: add id() support for geometries (#618).
Fixed
- Fix Fix serialization unit test when running without Qhull support (#611)
- Compiler warnings (#601, #605)
- CMake: fix assimp finder
- Don’t define GCC7 Boost serialization hack when
HPP_FCL_SKIP_EIGEN_BOOST_SERIALIZATIONis defined (#530) - Default parameters for narrowphase algorithms (GJK and EPA); fixed assertion checks that were sometimes failing in GJK simplex projection and BVH
collide(#531). - Created a new macro
HPP_FCL_ASSERTwhich behaves as an assert by default. When the optionHPP_FCL_TURN_ASSERT_INTO_EXCEPTIONis turned on, it replaces the macro by an exception (#533). Also fixed an EPA assert inGJKSolver. - Simplify internals of hpp-fcl (#535):
- Computing distance between 2 primitives shapes does not use a traversal node anymore.
- Removed successive mallocs in GJK/EPA when using an instance of
GJKSolvermultiple times. -
GJKSolvernow deals with all statuses of GJK/EPA. Some of these statuses represent a bad behavior of GJK/EPA and now trigger an assertion in Debug mode. Usefull for debugging these algos. - Logging was added with macros like
HPP_FCL_LOG_(INFO/DEBUG/WARNING/ERROR); hpp-fcl can now log usefull info when the preprocessor optionHPP_FCL_ENABLE_LOGGINGis enabled. - Deprecated
enable_distance_lower_boundinCollisionRequest; a lower bound on distance is always computed. - Deprecated
enable_nearest_pointsinDistanceRequest; they are always computed and are the points of the shapes that achieve a distance ofDistanceResult::min_distance. - Added
enable_signed_distanceflag inDistanceRequest(defaulttrue). Turn this of for better performance if only the distance when objects are disjoint is needed. - The internal collision and distance functions of hpp-fcl now use
CollisionRequest::enable_contactandDistanceRequest::enable_signed_distanceto control whether or not penetration information should be computed. There are many scenarios where we don’t need the penetration information and only want to know if objects are colliding and compute their distance only if they are disjoint. These flags allow the user to control the trade-off between performance vs. information of the library. - Fix convergence criterion of EPA; made GJK and EPA convergence criterion absolute + relative to scale to the shapes’ dimensions; remove max face/vertices fields from EPA (these can be deduced from the max number of iterations)
- Account for lateral borders in Height Fields model.
- Fix compilation error on recent APPLE compilers (#539).
- Fix printing of deprecated message (#540).
- Fix compilation with earlier Eigen version
- Fix compilation warning message
- Fix issue in Octomap.computeLocalAABB
- Fix unsupported function for contact_patch_matrix
- Fix Octomap dependency on ROS
2.4.5 - 2024-07-28
Fixed
- Fix Octomap dependency on ROS
2.4.4 - 2024-03-06
2.4.3 - 2024-03-06
Fixed
- updated cmake module to fix documentation generation
- test documentation in conda ci
2.4.2 - 2024-03-06
Fixed
- Fix CMAKE_INSTALL_{} path for installation (#543)
2.4.1 - 2024-01-23
Fixed
- CachedMeshLoader checks file last modification time.
- Fix call to clear methods for {Collision,Distance}Data inside init function (#509)
- CMake: fix submodule use in bindings in (#512)
- Fix bug in DynamicAABBTreeCollisionManager (see #514) in (#515)
Added
- In struct Contact
- Documentation of the members,
- initialization of normal, closest points and contact point in constructors
- method getDistanceToCollision
- New variant of GJK (PolyakAcceleration).
- Specialization of distance computation between
- Sphere and Capsule,
- Ellipsoid and Halfspace,
- Ellipsoid and Plane.
- Collision computation between Octree and HeightField.
Changed
- Matrixx3f and Matrixx3i become row major.
- Use shared pointers to vectors instead of arrays for vertices and triangles in class BVHModelBase.
Removed
- members related epa in class QueryRequest
2.4.0 - 2023-11-27
Added
- Add method to
CollisionObjectto getCollisionGeometryraw pointer
Fixed
- Fix RPATH computation on OSX
- Fix Python stubs generation on Windows
2.3.7 - 2023-11-15
What’s Changed
2.3.6 - 2023-09-30
What’s Changed
- Update ROS_DISTRO by @jcarpent (#442)
- Add citations by @jcarpent (#449)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#444)
- [WIP] Debug by @jcarpent (#455)
- CMake: require >= 3.10 by @nim65s (#453)
- core: fix SaPCollisionManager::empty() by @rujialiu (#454)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#452)
New Contributors
2.3.5 - 2023-07-11
What’s Changed
- Fix compilation warning by @jcarpent (#434)
- Fix parsing of doxygen doc by @jcarpent (#439)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#438)
2.3.4 - 2023-06-01
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#414)
- Fix conversion warning by @wxmerkt (#417)
- Add missing boost include by @nim65s (#418)
- ci: update macos-linux-pip by @nim65s (#419)
- Modernize Cmake use by @nim65s (#420)
- tests: use boost::filesystem by @nim65s (#424)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#425)
- Update minimal Python version by @jcarpent (#427)
- Sync submodule cmake by @jcarpent (#430)
- Sync submodule CMake by @jcarpent (#431)
2.3.3 - 2023-05-09
What’s Changed
2.3.2 - 2023-04-27
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#391)
- Sync submodule cmake by @jcarpent (#393)
- Topic/rpath by @nim65s (#394)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#396)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#399)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#402)
- Sync submodule cmake by @jcarpent (#406)
2.3.1 - 2023-03-25
What’s Changed
- Remove useless call to /proc/cpuinfo by @jcarpent (#385)
- Add pip CI by @nim65s (#386)
- [GJKSolver] Fix missing switch case in result status of GJK by @lmontaut (#387)
- Sync submodule cmake by @jcarpent (#388)
2.3.0 - 2023-03-17
What’s Changed
- [CI] Remove EOL Galactic by @wxmerkt (#366)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#367)
- Sync submodule cmake by @jcarpent (#368)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#369)
- Adding EarlyStopped flag in GJK by @lmontaut (#371)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#373)
- Update CI by @jcarpent (#374)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#375)
- Skip test if BUILD_TESTING is OFF by @jcarpent (#378)
2.2.0 - 2022-12-12
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#358)
- Extract checks if AABB overlap by @jmirabel (#360)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#361)
- Sync submodule CMake by @jcarpent (#362)
- Add support of Pickling by @jcarpent (#363)
2.1.4 - 2022-10-24
What’s Changed
- Sync submodule CMake by @jcarpent (#352)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#353)
2.1.3 - 2022-09-13
What’s Changed
- Minor boost cleanup by @pantor (#331)
- [CI] Activate ROS2 configurations by @wxmerkt (#332)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#337)
- Sync submodule cmake by @jcarpent (#341)
- Fix shapeIntersect when for EPA FallBack by @jcarpent (#342)
- Fix findAssimp on Windows by @jcarpent (#345)
- Sync submodule cmake by @jcarpent (#347)
New Contributors
2.1.2 - 2022-08-01
What’s Changed
- core: add EPA::FallBack condition to shapeDistance computation by @lmontaut (#325)
- CMake: update to eigenpy 2.7.10 by @nim65s (#327)
2.1.1 - 2022-07-25
What’s Changed
- cmake: relocatable package for recent CMake versions by @nim65s (#319)
- ROS2/Colcon integration by @wxmerkt (#321)
2.1.0 - 2022-07-13
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#288)
- Add enum helpers by @jcarpent (#290)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#294)
- Ellipsoids in collision & distance matrices by @lmontaut (#295)
- doc: simplex projection in GJK class. by @lmontaut (#296)
- Feature: Nesterov acceleration for GJK by @lmontaut (#289)
- Add more testing to broadphase by @jcarpent (#298)
- Feature: adding convergence criterions for GJK algorithm by @lmontaut (#299)
- Sync submodule cmake by @jcarpent (#300)
- Reorder triangles when computing convex hulls by @lmontaut (#301)
- Exposing gjk utils by @lmontaut (#302)
- Fix assert precision in GJK by @jcarpent (#304)
- Simplify GJKSolver settings by @jcarpent (#305)
- Add CollisionResult::nearest_points by @jcarpent (#303)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#306)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#309)
- Fix minimal value for GJK::distance_upper_bound by @jcarpent (#310)
- Fix incoherent overlap by @jcarpent (#311)
- Expose shared_ptr
by [@Jiayuan-Gu](https://github.com/Jiayuan-Gu) ([#314](https://github.com/humanoid-path-planner/hpp-fcl/pull/314)) - test/gjk_convergence_criterion: Add check on GJK::Status by @wxmerkt (#315)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#316)
- Handle negative security margin by @jcarpent (#312)
New Contributors
- @Jiayuan-Gu made their first contribution (#314)
2.0.1 - 2022-04-15
This PR mainly fixes packaging issues and removes compilation warnings.
What’s Changed
- Zero warnings by @wxmerkt (#282)
- Sync submodule cmake by @jcarpent (#283)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#284)
- Activate python3-pylatexenc dependency by @wxmerkt (#286)
- Comment pylatexenc again since it’s not available on the buildfarm by @wxmerkt (#287)
New Contributors
- @pre-commit-ci made their first contribution (#284)
2.0.0 - 2022-04-06
This new release reintroduces the full support of Broad phase within hpp-fcl while also enforcing C++11 as minimal standard.
What’s Changed
- Add Ellipsoid by @jcarpent (#259)
- Removing comment about inflation. by @lmontaut (#261)
- Reintroduce broadphase by @jcarpent (#260)
- Simplify CollisionObject by removing cgeom_const by @jcarpent (#263)
- Address some warnings by @wxmerkt (#262)
- Fix missing copy of aabb_local in CollisionGeometry by @jcarpent (#264)
- use std::shared_ptr, fix #218 by @nim65s (#266)
- Fix broadphase warnings for clang (some conversion remain for g++) by @wxmerkt (#268)
- [ComputeCollision] Return no collision if security_margin is set to -inf by @florent-lamiraux (#271)
- tests: remove link to boost unit test framework by @nim65s (#270)
- Fix computation of aabb_center by @jcarpent (#273)
- Add operator== and operator!= to CollisionGeometry by @jcarpent (#274)
- Merge pull request #276 from humanoid-path-planner/patch-release-1.8.1 by @jcarpent (#277)
- Fix some missing features in base classes by @jcarpent (#275)
- Add operator{==,!=} to CollisionObject by @jcarpent (#278)
- Configure and apply pre-commit by @jcarpent (#280)
- Fix DistanceCallBackBaseWrapper by @jcarpent (#281)
New Contributors
1.8.1 - 2022-03-20
What’s Changed
1.8.0 - 2022-02-08
What’s Changed
- [CMake] Qhull is a private dependency by @nim65s (#247)
- Remove useless warnings by @jcarpent (#248)
- fix submodule url by @nim65s (#246)
- Remove warnings and add missing noalias by @jcarpent (#249)
- Function makeOctree returns a shared pointer by @florent-lamiraux (#254)
- Add support of HeightField by @jcarpent (#251)
- [OcTree] Add method to save octree in obj file. by @florent-lamiraux (#256)
- Fix C++98 compatibility by @jcarpent (#258)
1.7.8 - 2021-10-30
What’s Changed
- Fix conversion by @jcarpent (#242)
- Fix exposition of vertices by @jcarpent (#243)
- Enhance Convex exposition by @jcarpent (#244)
- Sync submodule cmake by @jcarpent (#245)
1.7.7 - 2021-09-13
This new release fixes several bugs within the framework.
1.7.6 - 2021-09-08
This new release improves the packaging of the project and integrates the Stub generation of Python bindings.
1.7.5 - 2021-07-30
This new release provides extended API exposition in Python, removes some code related to CDD while also trying to rely on the QHULL version present on the system.
1.7.4 - 2021-06-11
This release fixes several bugs:
- correct update of the distance lower bound
- fix memory footprint computation
while also removing the support of Travis CI.
1.7.3 - 2021-05-26
This new release provides:
- fixes of LINE and POINTS when loading meshes with assimp
- removing of various warnings
- computation of memory footprint for geometries
1.7.2 - 2021-04-19
This new release improves the loading of meshes using Assimp by automatically removing degenerated LINES and POINTS.
1.7.1 - 2021-04-02
This new release reduces the impact of timers on the computations. This should be used with care and can be enabled by setting the correct flag to true in the QueryRequest.
1.7.0 - 2021-03-31
This new release provides:
- extended support for serialization
- timing of the collision/distance computations
- helpers to build octree
- various bug fixes and interface improvements
1.6.0 - 2020-10-06
This new release provides:
- functors for evaluating Collision and Distances (faster call)
- extended support of v142 compiler
- support of collision check between HalfSpace and Convex shapes
- improvement of GJK solver
- fixes on Python bindings
1.5.4 - 2020-09-22
In this new release, the support of collision checking between Convex objects and HalfSpace have been enhanced and some minor fixes have been provided.
1.5.3 - 2020-08-31
This new release provides better CMake packaging and improved GJK algorithms.
1.5.2 - 2020-08-15
This release improves the packaging of the project and provides fixes for the GJK solver.
1.5.1 - 2020-08-06
This new release fixes packaging issues with precedent release 1.5.0. It also provides additional fixes in main collision/distance algorithms.
1.4.6 - 2020-06-10
This new release enhances the packaging of the project and allows the compilation of FCL on Windows systems.
1.4.5 - 2020-06-03
Changes in v1.4.5:
- Fix Python 3 doc generation
- Fix packaging of the project
- Compilation on Windows.
- [CMake] Install missing header.
- Add collide and distance prototype that update the GJK guess.
- Add support function cached guess in queries and merge query attribute.
- Add function to generate the convex hull.
- Add hint to the support function + Fix usage of GJK guess.
- [Python] Add constructor for class Convex.
- [Python] Bind functions to create BVHModel.
1.4.4 - 2020-04-29
Changes in 1.4.4:
- add MeshLoader::loadOctree
- fix generation of XML documentation
- fix generation of Doxygen documentation
1.4.3 - 2020-04-08
This new release fixes some packagings issues for OS X systems.
1.4.2 - 2020-04-04
Changes in v1.4.2:
- don’t require linking to eigenpy in .pc file.
1.4.1 - 2020-04-03
Changes in v1.4.1:
- Bug fix + prepare optimization of collision using GJK / EPA
- Add missing constructor for Transform3f
1.4.0 - 2020-04-03
Changes since v1.3.0:
- Improve code efficiency + use shared memory between Numpy and Eigen
- [Python] Doc and minor update + [C++] bugfix
- [Python] Fix bindings of CollisionResult.
- FIX: throw when no contact is available
- Minor fix and computational improvments
- [GJK/EPA] Fix bugs + Treat sphere as point and capsule as line segment.
- Fix boxSphereDistance
- Provide documentation for the Python bindings.
- Generate Python documentation from doxygen documentation.
- Fix issue when Python_EXECUTABLE is not defined
- update CMake packaging
1.3.0 - 2020-01-28
This new release comes with:
- the removing of the GJK solver
- the Python bindings build by default
- an improved documentation
- additional Python bindings
1.2.2 - 2019-12-17
This new Release improves the Python bindings and fixes an important bug when checking the collision between two Capsules.
Thanks to @rstrudel for this fix.
1.2.1 - 2019-12-09
This new release improves both the packaging of the project, which seems to be totally compatible with the new CMake linkage style. In addition, the bindings are now fully compatible with Pinocchio.
1.2.0 - 2019-11-22
Changes since v1.1.3:
- Add python bindings
- Update CMake
- Add version support
- New folder Internal for internal header
- Travis: update CI & change policy to only perform build in DEBUG mode on Bionic
- assimp: fix issue with recent version of assimp
- [bindings] [CMakeLists] Use .so for Mac and .pyd for Windows, fix #86
- Organize documentation
- [CMake] fix octomap detection
- [Minor] update CMake module + fix visibility of some methods.
- Enable Convex / Convex queries + Add Python bindings.
- Fix unit-tests and compilation
- [GJK] Fix GJK::encloseOrigin (fixes unit-tests)
- Improve GJK implementation + OBB overlap test + bug fixes
- Clean include BV/BVH/math/mesh_loader
1.1.3 - 2019-08-07
This new release enhances the compatibility of hpp-fcl with C++14 and more. This feature is requested for integration in Anaconda.
1.1.2 - 2019-08-05
This new release provides a fix in the parallelization of the computations and improves the packaging of the whole project.
1.0.2 - 2019-04-24
Changes since v1.0.1:
- obb: fix compatibility with Eigen 3.0.5
- [CI] octomap for osx
1.0.1 - 2019-02-20
- Fix CI on OSX
- Declare CachedMeshLoader::Key::operator<
- minor details
0.7.0 - 2019-01-31
This release is mainly here to allow the packaging of HPP-RBPRM. Another release will follow with more news.
0.6.0 - 2018-10-22
- Fix bug when OCTOMAP is not found
- move buildTrianglePlane and clipTriangle method from private to public
- Fix bug with “" symbols
- [CMake] Add flags related to Octomap in pkg-config file and remove FCL_HAVE_EIGEN
0.5.1 - 2017-10-02
Now Eigen is at the heart of linear algebra computations.
0.5 - 2017-03-17
First release
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged hpp-fcl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | BSD |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2024-10-10 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Wolfgang Merkt
Authors
HPP-FCL — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015. Since then, a large part of the code has been rewritten or removed (for the unused and untested part). The broad phase was reintroduced by Justin Carpentier in 2022 based on the FCL version 0.7.0.
If you use HPP-FCL in your projects and research papers, we would appreciate it if you’d cite it.
New features
Compared to the original FCL library, the main new features are:
- a dedicated and efficient implementation of the GJK algorithm (we do not rely anymore on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performances (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
This project is now used in many robotics frameworks such as Pinocchio, an open-source software that implements efficient and versatile rigid body dynamics algorithms, the Humanoid Path Planner, an open-source software for Motion and Manipulation Planning. HPP-FCL has also been recently used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, HPP-FCL implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performances, as depicted by the figures below.
On the one hand, we have benchmarked HPP-FCL against major software alternatives of the state of the art:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why.
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Pinocchio
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install hpp-fcl.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using HPP-FCL in C++:
#include "hpp/fcl/math/transform.h"
#include "hpp/fcl/mesh_loader/loader.h"
#include "hpp/fcl/BVH/BVH_model.h"
#include "hpp/fcl/collision.h"
#include "hpp/fcl/collision_data.h"
#include <iostream>
#include <memory>
// Function to load a convex mesh from a `.obj`, `.stl` or `.dae` file.
//
// This function imports the object inside the file as a BVHModel, i.e. a point cloud
// which is hierarchically transformed into a tree of bounding volumes.
// The leaves of this tree are the individual points of the point cloud
// stored in the `.obj` file.
// This BVH can then be used for collision detection.
//
// For better computational efficiency, we sometimes prefer to work with
// the convex hull of the point cloud. This insures that the underlying object
// is convex and thus very fast collision detection algorithms such as
// GJK or EPA can be called with this object.
// Consequently, after creating the BVH structure from the point cloud, this function
// also computes its convex hull.
std::shared_ptr<hpp::fcl::ConvexBase> loadConvexMesh(const std::string& file_name) {
hpp::fcl::NODE_TYPE bv_type = hpp::fcl::BV_AABB;
hpp::fcl::MeshLoader loader(bv_type);
hpp::fcl::BVHModelPtr_t bvh = loader.load(file_name);
bvh->buildConvexHull(true, "Qt");
return bvh->convex;
}
int main() {
// Create the hppfcl shapes.
// Hppfcl supports many primitive shapes: boxes, spheres, capsules, cylinders, ellipsoids, cones, planes,
// halfspace and convex meshes (i.e. convex hulls of clouds of points).
// It also supports BVHs (bounding volumes hierarchies), height-fields and octrees.
std::shared_ptr<hpp::fcl::Ellipsoid> shape1 = std::make_shared<hpp::fcl::Ellipsoid>(0.7, 1.0, 0.8);
std::shared_ptr<hpp::fcl::ConvexBase> shape2 = loadConvexMesh("../path/to/mesh/file.obj");
// Define the shapes' placement in 3D space
hpp::fcl::Transform3f T1;
T1.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T1.setTranslation(hpp::fcl::Vec3f::Random());
hpp::fcl::Transform3f T2 = hpp::fcl::Transform3f::Identity();
T2.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T2.setTranslation(hpp::fcl::Vec3f::Random());
// Define collision requests and results.
//
// The collision request allows to set parameters for the collision pair.
// For example, we can set a positive or negative security margin.
// If the distance between the shapes is less than the security margin, the shapes
// will be considered in collision.
// Setting a positive security margin can be usefull in motion planning,
// i.e to prevent shapes from getting too close to one another.
// In physics simulation, allowing a negative security margin may be usefull to stabilize the simulation.
hpp::fcl::CollisionRequest col_req;
col_req.security_margin = 1e-1;
// A collision result stores the result of the collision test (signed distance between the shapes,
// witness points location, normal etc.)
hpp::fcl::CollisionResult col_res;
// Collision call
hpp::fcl::collide(shape1.get(), T1, shape2.get(), T2, col_req, col_res);
// We can access the collision result once it has been populated
std::cout << "Collision? " << col_res.isCollision() << "\n";
if (col_res.isCollision()) {
hpp::fcl::Contact contact = col_res.getContact(0);
// The penetration depth does **not** take into account the security margin.
// Consequently, the penetration depth is the true signed distance which separates the shapes.
// To have the distance which takes into account the security margin, we can simply add the two together.
std::cout << "Penetration depth: " << contact.penetration_depth << "\n";
std::cout << "Distance between the shapes including the security margin: " << contact.penetration_depth + col_req.security_margin << "\n";
std::cout << "Witness point on shape1: " << contact.nearest_points[0].transpose() << "\n";
std::cout << "Witness point on shape2: " << contact.nearest_points[1].transpose() << "\n";
std::cout << "Normal: " << contact.normal.transpose() << "\n";
}
// Before calling another collision test, it is important to clear the previous results stored in the collision result.
col_res.clear();
return 0;
}
Python example
Here is the C++ example from above translated in python using HPP-FCL’s python bindings:
import numpy as np
import hppfcl
# Optional:
# The Pinocchio library is a rigid body algorithms library and has a handy SE3 module.
# It can be installed as simply as `conda -c conda-forge install pinocchio`.
# Installing pinocchio also installs hpp-fcl.
import pinocchio as pin
def loadConvexMesh(file_name: str):
loader = hppfcl.MeshLoader()
bvh: hppfcl.BVHModelBase = loader.load(file_name)
bvh.buildConvexHull(True, "Qt")
return bvh.convex
if __name__ == "__main__":
# Create hppfcl shapes
shape1 = hppfcl.Ellipsoid(0.7, 1.0, 0.8)
shape2 = loadConvexMesh("../path/to/mesh/file.obj")
# Define the shapes' placement in 3D space
T1 = hppfcl.Transform3f()
T1.setTranslation(pin.SE3.Random().translation)
T1.setRotation(pin.SE3.Random().rotation)
T2 = hppfcl.Transform3f();
# Using np arrays also works
T1.setTranslation(np.random.rand(3))
T2.setRotation(pin.SE3.Random().rotation)
# Define collision requests and results
col_req = hppfcl.CollisionRequest()
col_res = hppfcl.CollisionResult()
# Collision call
hppfcl.collide(shape1, T1, shape2, T2, col_req, col_res)
# Accessing the collision result once it has been populated
print("Is collision? ", {col_res.isCollision()})
if col_res.isCollision():
contact: hppfcl.Contact = col_res.getContact(0)
print("Penetration depth: ", contact.penetration_depth)
print("Distance between the shapes including the security margin: ", contact.penetration_depth + col_req.security_margin)
print("Witness point shape1: ", contact.getNearestPoint1())
print("Witness point shape2: ", contact.getNearestPoint2())
print("Normal: ", contact.normal)
# Before running another collision call, it is important to clear the old one
col_res.clear()
Acknowledgments
The development of HPP-FCL is actively supported by the Gepetto team @LAAS-CNRS, the Willow team @INRIA and, to some extend, Eureka Robotics.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Added
Transform3f::RandomandTransform3f::setRandom(#584) - New feature: computation of contact surfaces for any pair of primitive shapes (triangle, sphere, ellipsoid, plane, halfspace, cone, capsule, cylinder, convex) (#574).
- Enhance Broadphase DynamicAABBTree to better handle planes and halfspace (#570)
-
#558:
- [internal] Removed dead code in
narrowphase/details.h(#558) - [internal] Removed specializations of methods of
GJKSolver. Now the specializations are all handled byShapeShapeDistanceinshape_shape_func.h. - [new feature] Added support for Swept-Sphere primitives (sphere, box, capsule, cone, ellipsoid, triangle, halfspace, plane, convex mesh).
- [internal] Removed dead code in
- [API change] Renamed default convergence criterion from
VDBtoDefault(#556) - Fixed EPA returning nans on cases where it could return an estimate of the normal and penetration depth. (#556)
- Fixed too low tolerance in GJK/EPA asserts (#554)
- Fixed
normal_and_nearest_pointstest (no need to have Eigen 3.4) (#553) - #549
- Optimize EPA: ignore useless faces in EPA’s polytope; warm-start support computation for
Convex; fix edge-cases witness points computation. - Add
Serializabletrait to transform, collision data, collision geometries, bounding volumes, bvh models, hfields. Collision problems can now be serialized from C++ and sent to python and vice versa. - CMake: allow use of installed jrl-cmakemodules (#564)
- Python: add id() support for geometries (#618).
Fixed
- Fix Fix serialization unit test when running without Qhull support (#611)
- Compiler warnings (#601, #605)
- CMake: fix assimp finder
- Don’t define GCC7 Boost serialization hack when
HPP_FCL_SKIP_EIGEN_BOOST_SERIALIZATIONis defined (#530) - Default parameters for narrowphase algorithms (GJK and EPA); fixed assertion checks that were sometimes failing in GJK simplex projection and BVH
collide(#531). - Created a new macro
HPP_FCL_ASSERTwhich behaves as an assert by default. When the optionHPP_FCL_TURN_ASSERT_INTO_EXCEPTIONis turned on, it replaces the macro by an exception (#533). Also fixed an EPA assert inGJKSolver. - Simplify internals of hpp-fcl (#535):
- Computing distance between 2 primitives shapes does not use a traversal node anymore.
- Removed successive mallocs in GJK/EPA when using an instance of
GJKSolvermultiple times. -
GJKSolvernow deals with all statuses of GJK/EPA. Some of these statuses represent a bad behavior of GJK/EPA and now trigger an assertion in Debug mode. Usefull for debugging these algos. - Logging was added with macros like
HPP_FCL_LOG_(INFO/DEBUG/WARNING/ERROR); hpp-fcl can now log usefull info when the preprocessor optionHPP_FCL_ENABLE_LOGGINGis enabled. - Deprecated
enable_distance_lower_boundinCollisionRequest; a lower bound on distance is always computed. - Deprecated
enable_nearest_pointsinDistanceRequest; they are always computed and are the points of the shapes that achieve a distance ofDistanceResult::min_distance. - Added
enable_signed_distanceflag inDistanceRequest(defaulttrue). Turn this of for better performance if only the distance when objects are disjoint is needed. - The internal collision and distance functions of hpp-fcl now use
CollisionRequest::enable_contactandDistanceRequest::enable_signed_distanceto control whether or not penetration information should be computed. There are many scenarios where we don’t need the penetration information and only want to know if objects are colliding and compute their distance only if they are disjoint. These flags allow the user to control the trade-off between performance vs. information of the library. - Fix convergence criterion of EPA; made GJK and EPA convergence criterion absolute + relative to scale to the shapes’ dimensions; remove max face/vertices fields from EPA (these can be deduced from the max number of iterations)
- Account for lateral borders in Height Fields model.
- Fix compilation error on recent APPLE compilers (#539).
- Fix printing of deprecated message (#540).
- Fix compilation with earlier Eigen version
- Fix compilation warning message
- Fix issue in Octomap.computeLocalAABB
- Fix unsupported function for contact_patch_matrix
- Fix Octomap dependency on ROS
2.4.5 - 2024-07-28
Fixed
- Fix Octomap dependency on ROS
2.4.4 - 2024-03-06
2.4.3 - 2024-03-06
Fixed
- updated cmake module to fix documentation generation
- test documentation in conda ci
2.4.2 - 2024-03-06
Fixed
- Fix CMAKE_INSTALL_{} path for installation (#543)
2.4.1 - 2024-01-23
Fixed
- CachedMeshLoader checks file last modification time.
- Fix call to clear methods for {Collision,Distance}Data inside init function (#509)
- CMake: fix submodule use in bindings in (#512)
- Fix bug in DynamicAABBTreeCollisionManager (see #514) in (#515)
Added
- In struct Contact
- Documentation of the members,
- initialization of normal, closest points and contact point in constructors
- method getDistanceToCollision
- New variant of GJK (PolyakAcceleration).
- Specialization of distance computation between
- Sphere and Capsule,
- Ellipsoid and Halfspace,
- Ellipsoid and Plane.
- Collision computation between Octree and HeightField.
Changed
- Matrixx3f and Matrixx3i become row major.
- Use shared pointers to vectors instead of arrays for vertices and triangles in class BVHModelBase.
Removed
- members related epa in class QueryRequest
2.4.0 - 2023-11-27
Added
- Add method to
CollisionObjectto getCollisionGeometryraw pointer
Fixed
- Fix RPATH computation on OSX
- Fix Python stubs generation on Windows
2.3.7 - 2023-11-15
What’s Changed
2.3.6 - 2023-09-30
What’s Changed
- Update ROS_DISTRO by @jcarpent (#442)
- Add citations by @jcarpent (#449)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#444)
- [WIP] Debug by @jcarpent (#455)
- CMake: require >= 3.10 by @nim65s (#453)
- core: fix SaPCollisionManager::empty() by @rujialiu (#454)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#452)
New Contributors
2.3.5 - 2023-07-11
What’s Changed
- Fix compilation warning by @jcarpent (#434)
- Fix parsing of doxygen doc by @jcarpent (#439)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#438)
2.3.4 - 2023-06-01
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#414)
- Fix conversion warning by @wxmerkt (#417)
- Add missing boost include by @nim65s (#418)
- ci: update macos-linux-pip by @nim65s (#419)
- Modernize Cmake use by @nim65s (#420)
- tests: use boost::filesystem by @nim65s (#424)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#425)
- Update minimal Python version by @jcarpent (#427)
- Sync submodule cmake by @jcarpent (#430)
- Sync submodule CMake by @jcarpent (#431)
2.3.3 - 2023-05-09
What’s Changed
2.3.2 - 2023-04-27
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#391)
- Sync submodule cmake by @jcarpent (#393)
- Topic/rpath by @nim65s (#394)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#396)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#399)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#402)
- Sync submodule cmake by @jcarpent (#406)
2.3.1 - 2023-03-25
What’s Changed
- Remove useless call to /proc/cpuinfo by @jcarpent (#385)
- Add pip CI by @nim65s (#386)
- [GJKSolver] Fix missing switch case in result status of GJK by @lmontaut (#387)
- Sync submodule cmake by @jcarpent (#388)
2.3.0 - 2023-03-17
What’s Changed
- [CI] Remove EOL Galactic by @wxmerkt (#366)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#367)
- Sync submodule cmake by @jcarpent (#368)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#369)
- Adding EarlyStopped flag in GJK by @lmontaut (#371)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#373)
- Update CI by @jcarpent (#374)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#375)
- Skip test if BUILD_TESTING is OFF by @jcarpent (#378)
2.2.0 - 2022-12-12
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#358)
- Extract checks if AABB overlap by @jmirabel (#360)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#361)
- Sync submodule CMake by @jcarpent (#362)
- Add support of Pickling by @jcarpent (#363)
2.1.4 - 2022-10-24
What’s Changed
- Sync submodule CMake by @jcarpent (#352)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#353)
2.1.3 - 2022-09-13
What’s Changed
- Minor boost cleanup by @pantor (#331)
- [CI] Activate ROS2 configurations by @wxmerkt (#332)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#337)
- Sync submodule cmake by @jcarpent (#341)
- Fix shapeIntersect when for EPA FallBack by @jcarpent (#342)
- Fix findAssimp on Windows by @jcarpent (#345)
- Sync submodule cmake by @jcarpent (#347)
New Contributors
2.1.2 - 2022-08-01
What’s Changed
- core: add EPA::FallBack condition to shapeDistance computation by @lmontaut (#325)
- CMake: update to eigenpy 2.7.10 by @nim65s (#327)
2.1.1 - 2022-07-25
What’s Changed
- cmake: relocatable package for recent CMake versions by @nim65s (#319)
- ROS2/Colcon integration by @wxmerkt (#321)
2.1.0 - 2022-07-13
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#288)
- Add enum helpers by @jcarpent (#290)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#294)
- Ellipsoids in collision & distance matrices by @lmontaut (#295)
- doc: simplex projection in GJK class. by @lmontaut (#296)
- Feature: Nesterov acceleration for GJK by @lmontaut (#289)
- Add more testing to broadphase by @jcarpent (#298)
- Feature: adding convergence criterions for GJK algorithm by @lmontaut (#299)
- Sync submodule cmake by @jcarpent (#300)
- Reorder triangles when computing convex hulls by @lmontaut (#301)
- Exposing gjk utils by @lmontaut (#302)
- Fix assert precision in GJK by @jcarpent (#304)
- Simplify GJKSolver settings by @jcarpent (#305)
- Add CollisionResult::nearest_points by @jcarpent (#303)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#306)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#309)
- Fix minimal value for GJK::distance_upper_bound by @jcarpent (#310)
- Fix incoherent overlap by @jcarpent (#311)
- Expose shared_ptr
by [@Jiayuan-Gu](https://github.com/Jiayuan-Gu) ([#314](https://github.com/humanoid-path-planner/hpp-fcl/pull/314)) - test/gjk_convergence_criterion: Add check on GJK::Status by @wxmerkt (#315)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#316)
- Handle negative security margin by @jcarpent (#312)
New Contributors
- @Jiayuan-Gu made their first contribution (#314)
2.0.1 - 2022-04-15
This PR mainly fixes packaging issues and removes compilation warnings.
What’s Changed
- Zero warnings by @wxmerkt (#282)
- Sync submodule cmake by @jcarpent (#283)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#284)
- Activate python3-pylatexenc dependency by @wxmerkt (#286)
- Comment pylatexenc again since it’s not available on the buildfarm by @wxmerkt (#287)
New Contributors
- @pre-commit-ci made their first contribution (#284)
2.0.0 - 2022-04-06
This new release reintroduces the full support of Broad phase within hpp-fcl while also enforcing C++11 as minimal standard.
What’s Changed
- Add Ellipsoid by @jcarpent (#259)
- Removing comment about inflation. by @lmontaut (#261)
- Reintroduce broadphase by @jcarpent (#260)
- Simplify CollisionObject by removing cgeom_const by @jcarpent (#263)
- Address some warnings by @wxmerkt (#262)
- Fix missing copy of aabb_local in CollisionGeometry by @jcarpent (#264)
- use std::shared_ptr, fix #218 by @nim65s (#266)
- Fix broadphase warnings for clang (some conversion remain for g++) by @wxmerkt (#268)
- [ComputeCollision] Return no collision if security_margin is set to -inf by @florent-lamiraux (#271)
- tests: remove link to boost unit test framework by @nim65s (#270)
- Fix computation of aabb_center by @jcarpent (#273)
- Add operator== and operator!= to CollisionGeometry by @jcarpent (#274)
- Merge pull request #276 from humanoid-path-planner/patch-release-1.8.1 by @jcarpent (#277)
- Fix some missing features in base classes by @jcarpent (#275)
- Add operator{==,!=} to CollisionObject by @jcarpent (#278)
- Configure and apply pre-commit by @jcarpent (#280)
- Fix DistanceCallBackBaseWrapper by @jcarpent (#281)
New Contributors
1.8.1 - 2022-03-20
What’s Changed
1.8.0 - 2022-02-08
What’s Changed
- [CMake] Qhull is a private dependency by @nim65s (#247)
- Remove useless warnings by @jcarpent (#248)
- fix submodule url by @nim65s (#246)
- Remove warnings and add missing noalias by @jcarpent (#249)
- Function makeOctree returns a shared pointer by @florent-lamiraux (#254)
- Add support of HeightField by @jcarpent (#251)
- [OcTree] Add method to save octree in obj file. by @florent-lamiraux (#256)
- Fix C++98 compatibility by @jcarpent (#258)
1.7.8 - 2021-10-30
What’s Changed
- Fix conversion by @jcarpent (#242)
- Fix exposition of vertices by @jcarpent (#243)
- Enhance Convex exposition by @jcarpent (#244)
- Sync submodule cmake by @jcarpent (#245)
1.7.7 - 2021-09-13
This new release fixes several bugs within the framework.
1.7.6 - 2021-09-08
This new release improves the packaging of the project and integrates the Stub generation of Python bindings.
1.7.5 - 2021-07-30
This new release provides extended API exposition in Python, removes some code related to CDD while also trying to rely on the QHULL version present on the system.
1.7.4 - 2021-06-11
This release fixes several bugs:
- correct update of the distance lower bound
- fix memory footprint computation
while also removing the support of Travis CI.
1.7.3 - 2021-05-26
This new release provides:
- fixes of LINE and POINTS when loading meshes with assimp
- removing of various warnings
- computation of memory footprint for geometries
1.7.2 - 2021-04-19
This new release improves the loading of meshes using Assimp by automatically removing degenerated LINES and POINTS.
1.7.1 - 2021-04-02
This new release reduces the impact of timers on the computations. This should be used with care and can be enabled by setting the correct flag to true in the QueryRequest.
1.7.0 - 2021-03-31
This new release provides:
- extended support for serialization
- timing of the collision/distance computations
- helpers to build octree
- various bug fixes and interface improvements
1.6.0 - 2020-10-06
This new release provides:
- functors for evaluating Collision and Distances (faster call)
- extended support of v142 compiler
- support of collision check between HalfSpace and Convex shapes
- improvement of GJK solver
- fixes on Python bindings
1.5.4 - 2020-09-22
In this new release, the support of collision checking between Convex objects and HalfSpace have been enhanced and some minor fixes have been provided.
1.5.3 - 2020-08-31
This new release provides better CMake packaging and improved GJK algorithms.
1.5.2 - 2020-08-15
This release improves the packaging of the project and provides fixes for the GJK solver.
1.5.1 - 2020-08-06
This new release fixes packaging issues with precedent release 1.5.0. It also provides additional fixes in main collision/distance algorithms.
1.4.6 - 2020-06-10
This new release enhances the packaging of the project and allows the compilation of FCL on Windows systems.
1.4.5 - 2020-06-03
Changes in v1.4.5:
- Fix Python 3 doc generation
- Fix packaging of the project
- Compilation on Windows.
- [CMake] Install missing header.
- Add collide and distance prototype that update the GJK guess.
- Add support function cached guess in queries and merge query attribute.
- Add function to generate the convex hull.
- Add hint to the support function + Fix usage of GJK guess.
- [Python] Add constructor for class Convex.
- [Python] Bind functions to create BVHModel.
1.4.4 - 2020-04-29
Changes in 1.4.4:
- add MeshLoader::loadOctree
- fix generation of XML documentation
- fix generation of Doxygen documentation
1.4.3 - 2020-04-08
This new release fixes some packagings issues for OS X systems.
1.4.2 - 2020-04-04
Changes in v1.4.2:
- don’t require linking to eigenpy in .pc file.
1.4.1 - 2020-04-03
Changes in v1.4.1:
- Bug fix + prepare optimization of collision using GJK / EPA
- Add missing constructor for Transform3f
1.4.0 - 2020-04-03
Changes since v1.3.0:
- Improve code efficiency + use shared memory between Numpy and Eigen
- [Python] Doc and minor update + [C++] bugfix
- [Python] Fix bindings of CollisionResult.
- FIX: throw when no contact is available
- Minor fix and computational improvments
- [GJK/EPA] Fix bugs + Treat sphere as point and capsule as line segment.
- Fix boxSphereDistance
- Provide documentation for the Python bindings.
- Generate Python documentation from doxygen documentation.
- Fix issue when Python_EXECUTABLE is not defined
- update CMake packaging
1.3.0 - 2020-01-28
This new release comes with:
- the removing of the GJK solver
- the Python bindings build by default
- an improved documentation
- additional Python bindings
1.2.2 - 2019-12-17
This new Release improves the Python bindings and fixes an important bug when checking the collision between two Capsules.
Thanks to @rstrudel for this fix.
1.2.1 - 2019-12-09
This new release improves both the packaging of the project, which seems to be totally compatible with the new CMake linkage style. In addition, the bindings are now fully compatible with Pinocchio.
1.2.0 - 2019-11-22
Changes since v1.1.3:
- Add python bindings
- Update CMake
- Add version support
- New folder Internal for internal header
- Travis: update CI & change policy to only perform build in DEBUG mode on Bionic
- assimp: fix issue with recent version of assimp
- [bindings] [CMakeLists] Use .so for Mac and .pyd for Windows, fix #86
- Organize documentation
- [CMake] fix octomap detection
- [Minor] update CMake module + fix visibility of some methods.
- Enable Convex / Convex queries + Add Python bindings.
- Fix unit-tests and compilation
- [GJK] Fix GJK::encloseOrigin (fixes unit-tests)
- Improve GJK implementation + OBB overlap test + bug fixes
- Clean include BV/BVH/math/mesh_loader
1.1.3 - 2019-08-07
This new release enhances the compatibility of hpp-fcl with C++14 and more. This feature is requested for integration in Anaconda.
1.1.2 - 2019-08-05
This new release provides a fix in the parallelization of the computations and improves the packaging of the whole project.
1.0.2 - 2019-04-24
Changes since v1.0.1:
- obb: fix compatibility with Eigen 3.0.5
- [CI] octomap for osx
1.0.1 - 2019-02-20
- Fix CI on OSX
- Declare CachedMeshLoader::Key::operator<
- minor details
0.7.0 - 2019-01-31
This release is mainly here to allow the packaging of HPP-RBPRM. Another release will follow with more news.
0.6.0 - 2018-10-22
- Fix bug when OCTOMAP is not found
- move buildTrianglePlane and clipTriangle method from private to public
- Fix bug with “" symbols
- [CMake] Add flags related to Octomap in pkg-config file and remove FCL_HAVE_EIGEN
0.5.1 - 2017-10-02
Now Eigen is at the heart of linear algebra computations.
0.5 - 2017-03-17
First release
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged hpp-fcl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | BSD |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2024-10-10 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Wolfgang Merkt
Authors
HPP-FCL — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015. Since then, a large part of the code has been rewritten or removed (for the unused and untested part). The broad phase was reintroduced by Justin Carpentier in 2022 based on the FCL version 0.7.0.
If you use HPP-FCL in your projects and research papers, we would appreciate it if you’d cite it.
New features
Compared to the original FCL library, the main new features are:
- a dedicated and efficient implementation of the GJK algorithm (we do not rely anymore on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performances (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
This project is now used in many robotics frameworks such as Pinocchio, an open-source software that implements efficient and versatile rigid body dynamics algorithms, the Humanoid Path Planner, an open-source software for Motion and Manipulation Planning. HPP-FCL has also been recently used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, HPP-FCL implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performances, as depicted by the figures below.
On the one hand, we have benchmarked HPP-FCL against major software alternatives of the state of the art:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why.
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Pinocchio
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install hpp-fcl.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using HPP-FCL in C++:
#include "hpp/fcl/math/transform.h"
#include "hpp/fcl/mesh_loader/loader.h"
#include "hpp/fcl/BVH/BVH_model.h"
#include "hpp/fcl/collision.h"
#include "hpp/fcl/collision_data.h"
#include <iostream>
#include <memory>
// Function to load a convex mesh from a `.obj`, `.stl` or `.dae` file.
//
// This function imports the object inside the file as a BVHModel, i.e. a point cloud
// which is hierarchically transformed into a tree of bounding volumes.
// The leaves of this tree are the individual points of the point cloud
// stored in the `.obj` file.
// This BVH can then be used for collision detection.
//
// For better computational efficiency, we sometimes prefer to work with
// the convex hull of the point cloud. This insures that the underlying object
// is convex and thus very fast collision detection algorithms such as
// GJK or EPA can be called with this object.
// Consequently, after creating the BVH structure from the point cloud, this function
// also computes its convex hull.
std::shared_ptr<hpp::fcl::ConvexBase> loadConvexMesh(const std::string& file_name) {
hpp::fcl::NODE_TYPE bv_type = hpp::fcl::BV_AABB;
hpp::fcl::MeshLoader loader(bv_type);
hpp::fcl::BVHModelPtr_t bvh = loader.load(file_name);
bvh->buildConvexHull(true, "Qt");
return bvh->convex;
}
int main() {
// Create the hppfcl shapes.
// Hppfcl supports many primitive shapes: boxes, spheres, capsules, cylinders, ellipsoids, cones, planes,
// halfspace and convex meshes (i.e. convex hulls of clouds of points).
// It also supports BVHs (bounding volumes hierarchies), height-fields and octrees.
std::shared_ptr<hpp::fcl::Ellipsoid> shape1 = std::make_shared<hpp::fcl::Ellipsoid>(0.7, 1.0, 0.8);
std::shared_ptr<hpp::fcl::ConvexBase> shape2 = loadConvexMesh("../path/to/mesh/file.obj");
// Define the shapes' placement in 3D space
hpp::fcl::Transform3f T1;
T1.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T1.setTranslation(hpp::fcl::Vec3f::Random());
hpp::fcl::Transform3f T2 = hpp::fcl::Transform3f::Identity();
T2.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T2.setTranslation(hpp::fcl::Vec3f::Random());
// Define collision requests and results.
//
// The collision request allows to set parameters for the collision pair.
// For example, we can set a positive or negative security margin.
// If the distance between the shapes is less than the security margin, the shapes
// will be considered in collision.
// Setting a positive security margin can be usefull in motion planning,
// i.e to prevent shapes from getting too close to one another.
// In physics simulation, allowing a negative security margin may be usefull to stabilize the simulation.
hpp::fcl::CollisionRequest col_req;
col_req.security_margin = 1e-1;
// A collision result stores the result of the collision test (signed distance between the shapes,
// witness points location, normal etc.)
hpp::fcl::CollisionResult col_res;
// Collision call
hpp::fcl::collide(shape1.get(), T1, shape2.get(), T2, col_req, col_res);
// We can access the collision result once it has been populated
std::cout << "Collision? " << col_res.isCollision() << "\n";
if (col_res.isCollision()) {
hpp::fcl::Contact contact = col_res.getContact(0);
// The penetration depth does **not** take into account the security margin.
// Consequently, the penetration depth is the true signed distance which separates the shapes.
// To have the distance which takes into account the security margin, we can simply add the two together.
std::cout << "Penetration depth: " << contact.penetration_depth << "\n";
std::cout << "Distance between the shapes including the security margin: " << contact.penetration_depth + col_req.security_margin << "\n";
std::cout << "Witness point on shape1: " << contact.nearest_points[0].transpose() << "\n";
std::cout << "Witness point on shape2: " << contact.nearest_points[1].transpose() << "\n";
std::cout << "Normal: " << contact.normal.transpose() << "\n";
}
// Before calling another collision test, it is important to clear the previous results stored in the collision result.
col_res.clear();
return 0;
}
Python example
Here is the C++ example from above translated in python using HPP-FCL’s python bindings:
import numpy as np
import hppfcl
# Optional:
# The Pinocchio library is a rigid body algorithms library and has a handy SE3 module.
# It can be installed as simply as `conda -c conda-forge install pinocchio`.
# Installing pinocchio also installs hpp-fcl.
import pinocchio as pin
def loadConvexMesh(file_name: str):
loader = hppfcl.MeshLoader()
bvh: hppfcl.BVHModelBase = loader.load(file_name)
bvh.buildConvexHull(True, "Qt")
return bvh.convex
if __name__ == "__main__":
# Create hppfcl shapes
shape1 = hppfcl.Ellipsoid(0.7, 1.0, 0.8)
shape2 = loadConvexMesh("../path/to/mesh/file.obj")
# Define the shapes' placement in 3D space
T1 = hppfcl.Transform3f()
T1.setTranslation(pin.SE3.Random().translation)
T1.setRotation(pin.SE3.Random().rotation)
T2 = hppfcl.Transform3f();
# Using np arrays also works
T1.setTranslation(np.random.rand(3))
T2.setRotation(pin.SE3.Random().rotation)
# Define collision requests and results
col_req = hppfcl.CollisionRequest()
col_res = hppfcl.CollisionResult()
# Collision call
hppfcl.collide(shape1, T1, shape2, T2, col_req, col_res)
# Accessing the collision result once it has been populated
print("Is collision? ", {col_res.isCollision()})
if col_res.isCollision():
contact: hppfcl.Contact = col_res.getContact(0)
print("Penetration depth: ", contact.penetration_depth)
print("Distance between the shapes including the security margin: ", contact.penetration_depth + col_req.security_margin)
print("Witness point shape1: ", contact.getNearestPoint1())
print("Witness point shape2: ", contact.getNearestPoint2())
print("Normal: ", contact.normal)
# Before running another collision call, it is important to clear the old one
col_res.clear()
Acknowledgments
The development of HPP-FCL is actively supported by the Gepetto team @LAAS-CNRS, the Willow team @INRIA and, to some extend, Eureka Robotics.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Added
Transform3f::RandomandTransform3f::setRandom(#584) - New feature: computation of contact surfaces for any pair of primitive shapes (triangle, sphere, ellipsoid, plane, halfspace, cone, capsule, cylinder, convex) (#574).
- Enhance Broadphase DynamicAABBTree to better handle planes and halfspace (#570)
-
#558:
- [internal] Removed dead code in
narrowphase/details.h(#558) - [internal] Removed specializations of methods of
GJKSolver. Now the specializations are all handled byShapeShapeDistanceinshape_shape_func.h. - [new feature] Added support for Swept-Sphere primitives (sphere, box, capsule, cone, ellipsoid, triangle, halfspace, plane, convex mesh).
- [internal] Removed dead code in
- [API change] Renamed default convergence criterion from
VDBtoDefault(#556) - Fixed EPA returning nans on cases where it could return an estimate of the normal and penetration depth. (#556)
- Fixed too low tolerance in GJK/EPA asserts (#554)
- Fixed
normal_and_nearest_pointstest (no need to have Eigen 3.4) (#553) - #549
- Optimize EPA: ignore useless faces in EPA’s polytope; warm-start support computation for
Convex; fix edge-cases witness points computation. - Add
Serializabletrait to transform, collision data, collision geometries, bounding volumes, bvh models, hfields. Collision problems can now be serialized from C++ and sent to python and vice versa. - CMake: allow use of installed jrl-cmakemodules (#564)
- Python: add id() support for geometries (#618).
Fixed
- Fix Fix serialization unit test when running without Qhull support (#611)
- Compiler warnings (#601, #605)
- CMake: fix assimp finder
- Don’t define GCC7 Boost serialization hack when
HPP_FCL_SKIP_EIGEN_BOOST_SERIALIZATIONis defined (#530) - Default parameters for narrowphase algorithms (GJK and EPA); fixed assertion checks that were sometimes failing in GJK simplex projection and BVH
collide(#531). - Created a new macro
HPP_FCL_ASSERTwhich behaves as an assert by default. When the optionHPP_FCL_TURN_ASSERT_INTO_EXCEPTIONis turned on, it replaces the macro by an exception (#533). Also fixed an EPA assert inGJKSolver. - Simplify internals of hpp-fcl (#535):
- Computing distance between 2 primitives shapes does not use a traversal node anymore.
- Removed successive mallocs in GJK/EPA when using an instance of
GJKSolvermultiple times. -
GJKSolvernow deals with all statuses of GJK/EPA. Some of these statuses represent a bad behavior of GJK/EPA and now trigger an assertion in Debug mode. Usefull for debugging these algos. - Logging was added with macros like
HPP_FCL_LOG_(INFO/DEBUG/WARNING/ERROR); hpp-fcl can now log usefull info when the preprocessor optionHPP_FCL_ENABLE_LOGGINGis enabled. - Deprecated
enable_distance_lower_boundinCollisionRequest; a lower bound on distance is always computed. - Deprecated
enable_nearest_pointsinDistanceRequest; they are always computed and are the points of the shapes that achieve a distance ofDistanceResult::min_distance. - Added
enable_signed_distanceflag inDistanceRequest(defaulttrue). Turn this of for better performance if only the distance when objects are disjoint is needed. - The internal collision and distance functions of hpp-fcl now use
CollisionRequest::enable_contactandDistanceRequest::enable_signed_distanceto control whether or not penetration information should be computed. There are many scenarios where we don’t need the penetration information and only want to know if objects are colliding and compute their distance only if they are disjoint. These flags allow the user to control the trade-off between performance vs. information of the library. - Fix convergence criterion of EPA; made GJK and EPA convergence criterion absolute + relative to scale to the shapes’ dimensions; remove max face/vertices fields from EPA (these can be deduced from the max number of iterations)
- Account for lateral borders in Height Fields model.
- Fix compilation error on recent APPLE compilers (#539).
- Fix printing of deprecated message (#540).
- Fix compilation with earlier Eigen version
- Fix compilation warning message
- Fix issue in Octomap.computeLocalAABB
- Fix unsupported function for contact_patch_matrix
- Fix Octomap dependency on ROS
2.4.5 - 2024-07-28
Fixed
- Fix Octomap dependency on ROS
2.4.4 - 2024-03-06
2.4.3 - 2024-03-06
Fixed
- updated cmake module to fix documentation generation
- test documentation in conda ci
2.4.2 - 2024-03-06
Fixed
- Fix CMAKE_INSTALL_{} path for installation (#543)
2.4.1 - 2024-01-23
Fixed
- CachedMeshLoader checks file last modification time.
- Fix call to clear methods for {Collision,Distance}Data inside init function (#509)
- CMake: fix submodule use in bindings in (#512)
- Fix bug in DynamicAABBTreeCollisionManager (see #514) in (#515)
Added
- In struct Contact
- Documentation of the members,
- initialization of normal, closest points and contact point in constructors
- method getDistanceToCollision
- New variant of GJK (PolyakAcceleration).
- Specialization of distance computation between
- Sphere and Capsule,
- Ellipsoid and Halfspace,
- Ellipsoid and Plane.
- Collision computation between Octree and HeightField.
Changed
- Matrixx3f and Matrixx3i become row major.
- Use shared pointers to vectors instead of arrays for vertices and triangles in class BVHModelBase.
Removed
- members related epa in class QueryRequest
2.4.0 - 2023-11-27
Added
- Add method to
CollisionObjectto getCollisionGeometryraw pointer
Fixed
- Fix RPATH computation on OSX
- Fix Python stubs generation on Windows
2.3.7 - 2023-11-15
What’s Changed
2.3.6 - 2023-09-30
What’s Changed
- Update ROS_DISTRO by @jcarpent (#442)
- Add citations by @jcarpent (#449)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#444)
- [WIP] Debug by @jcarpent (#455)
- CMake: require >= 3.10 by @nim65s (#453)
- core: fix SaPCollisionManager::empty() by @rujialiu (#454)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#452)
New Contributors
2.3.5 - 2023-07-11
What’s Changed
- Fix compilation warning by @jcarpent (#434)
- Fix parsing of doxygen doc by @jcarpent (#439)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#438)
2.3.4 - 2023-06-01
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#414)
- Fix conversion warning by @wxmerkt (#417)
- Add missing boost include by @nim65s (#418)
- ci: update macos-linux-pip by @nim65s (#419)
- Modernize Cmake use by @nim65s (#420)
- tests: use boost::filesystem by @nim65s (#424)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#425)
- Update minimal Python version by @jcarpent (#427)
- Sync submodule cmake by @jcarpent (#430)
- Sync submodule CMake by @jcarpent (#431)
2.3.3 - 2023-05-09
What’s Changed
2.3.2 - 2023-04-27
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#391)
- Sync submodule cmake by @jcarpent (#393)
- Topic/rpath by @nim65s (#394)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#396)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#399)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#402)
- Sync submodule cmake by @jcarpent (#406)
2.3.1 - 2023-03-25
What’s Changed
- Remove useless call to /proc/cpuinfo by @jcarpent (#385)
- Add pip CI by @nim65s (#386)
- [GJKSolver] Fix missing switch case in result status of GJK by @lmontaut (#387)
- Sync submodule cmake by @jcarpent (#388)
2.3.0 - 2023-03-17
What’s Changed
- [CI] Remove EOL Galactic by @wxmerkt (#366)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#367)
- Sync submodule cmake by @jcarpent (#368)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#369)
- Adding EarlyStopped flag in GJK by @lmontaut (#371)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#373)
- Update CI by @jcarpent (#374)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#375)
- Skip test if BUILD_TESTING is OFF by @jcarpent (#378)
2.2.0 - 2022-12-12
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#358)
- Extract checks if AABB overlap by @jmirabel (#360)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#361)
- Sync submodule CMake by @jcarpent (#362)
- Add support of Pickling by @jcarpent (#363)
2.1.4 - 2022-10-24
What’s Changed
- Sync submodule CMake by @jcarpent (#352)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#353)
2.1.3 - 2022-09-13
What’s Changed
- Minor boost cleanup by @pantor (#331)
- [CI] Activate ROS2 configurations by @wxmerkt (#332)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#337)
- Sync submodule cmake by @jcarpent (#341)
- Fix shapeIntersect when for EPA FallBack by @jcarpent (#342)
- Fix findAssimp on Windows by @jcarpent (#345)
- Sync submodule cmake by @jcarpent (#347)
New Contributors
2.1.2 - 2022-08-01
What’s Changed
- core: add EPA::FallBack condition to shapeDistance computation by @lmontaut (#325)
- CMake: update to eigenpy 2.7.10 by @nim65s (#327)
2.1.1 - 2022-07-25
What’s Changed
- cmake: relocatable package for recent CMake versions by @nim65s (#319)
- ROS2/Colcon integration by @wxmerkt (#321)
2.1.0 - 2022-07-13
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#288)
- Add enum helpers by @jcarpent (#290)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#294)
- Ellipsoids in collision & distance matrices by @lmontaut (#295)
- doc: simplex projection in GJK class. by @lmontaut (#296)
- Feature: Nesterov acceleration for GJK by @lmontaut (#289)
- Add more testing to broadphase by @jcarpent (#298)
- Feature: adding convergence criterions for GJK algorithm by @lmontaut (#299)
- Sync submodule cmake by @jcarpent (#300)
- Reorder triangles when computing convex hulls by @lmontaut (#301)
- Exposing gjk utils by @lmontaut (#302)
- Fix assert precision in GJK by @jcarpent (#304)
- Simplify GJKSolver settings by @jcarpent (#305)
- Add CollisionResult::nearest_points by @jcarpent (#303)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#306)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#309)
- Fix minimal value for GJK::distance_upper_bound by @jcarpent (#310)
- Fix incoherent overlap by @jcarpent (#311)
- Expose shared_ptr
by [@Jiayuan-Gu](https://github.com/Jiayuan-Gu) ([#314](https://github.com/humanoid-path-planner/hpp-fcl/pull/314)) - test/gjk_convergence_criterion: Add check on GJK::Status by @wxmerkt (#315)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#316)
- Handle negative security margin by @jcarpent (#312)
New Contributors
- @Jiayuan-Gu made their first contribution (#314)
2.0.1 - 2022-04-15
This PR mainly fixes packaging issues and removes compilation warnings.
What’s Changed
- Zero warnings by @wxmerkt (#282)
- Sync submodule cmake by @jcarpent (#283)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#284)
- Activate python3-pylatexenc dependency by @wxmerkt (#286)
- Comment pylatexenc again since it’s not available on the buildfarm by @wxmerkt (#287)
New Contributors
- @pre-commit-ci made their first contribution (#284)
2.0.0 - 2022-04-06
This new release reintroduces the full support of Broad phase within hpp-fcl while also enforcing C++11 as minimal standard.
What’s Changed
- Add Ellipsoid by @jcarpent (#259)
- Removing comment about inflation. by @lmontaut (#261)
- Reintroduce broadphase by @jcarpent (#260)
- Simplify CollisionObject by removing cgeom_const by @jcarpent (#263)
- Address some warnings by @wxmerkt (#262)
- Fix missing copy of aabb_local in CollisionGeometry by @jcarpent (#264)
- use std::shared_ptr, fix #218 by @nim65s (#266)
- Fix broadphase warnings for clang (some conversion remain for g++) by @wxmerkt (#268)
- [ComputeCollision] Return no collision if security_margin is set to -inf by @florent-lamiraux (#271)
- tests: remove link to boost unit test framework by @nim65s (#270)
- Fix computation of aabb_center by @jcarpent (#273)
- Add operator== and operator!= to CollisionGeometry by @jcarpent (#274)
- Merge pull request #276 from humanoid-path-planner/patch-release-1.8.1 by @jcarpent (#277)
- Fix some missing features in base classes by @jcarpent (#275)
- Add operator{==,!=} to CollisionObject by @jcarpent (#278)
- Configure and apply pre-commit by @jcarpent (#280)
- Fix DistanceCallBackBaseWrapper by @jcarpent (#281)
New Contributors
1.8.1 - 2022-03-20
What’s Changed
1.8.0 - 2022-02-08
What’s Changed
- [CMake] Qhull is a private dependency by @nim65s (#247)
- Remove useless warnings by @jcarpent (#248)
- fix submodule url by @nim65s (#246)
- Remove warnings and add missing noalias by @jcarpent (#249)
- Function makeOctree returns a shared pointer by @florent-lamiraux (#254)
- Add support of HeightField by @jcarpent (#251)
- [OcTree] Add method to save octree in obj file. by @florent-lamiraux (#256)
- Fix C++98 compatibility by @jcarpent (#258)
1.7.8 - 2021-10-30
What’s Changed
- Fix conversion by @jcarpent (#242)
- Fix exposition of vertices by @jcarpent (#243)
- Enhance Convex exposition by @jcarpent (#244)
- Sync submodule cmake by @jcarpent (#245)
1.7.7 - 2021-09-13
This new release fixes several bugs within the framework.
1.7.6 - 2021-09-08
This new release improves the packaging of the project and integrates the Stub generation of Python bindings.
1.7.5 - 2021-07-30
This new release provides extended API exposition in Python, removes some code related to CDD while also trying to rely on the QHULL version present on the system.
1.7.4 - 2021-06-11
This release fixes several bugs:
- correct update of the distance lower bound
- fix memory footprint computation
while also removing the support of Travis CI.
1.7.3 - 2021-05-26
This new release provides:
- fixes of LINE and POINTS when loading meshes with assimp
- removing of various warnings
- computation of memory footprint for geometries
1.7.2 - 2021-04-19
This new release improves the loading of meshes using Assimp by automatically removing degenerated LINES and POINTS.
1.7.1 - 2021-04-02
This new release reduces the impact of timers on the computations. This should be used with care and can be enabled by setting the correct flag to true in the QueryRequest.
1.7.0 - 2021-03-31
This new release provides:
- extended support for serialization
- timing of the collision/distance computations
- helpers to build octree
- various bug fixes and interface improvements
1.6.0 - 2020-10-06
This new release provides:
- functors for evaluating Collision and Distances (faster call)
- extended support of v142 compiler
- support of collision check between HalfSpace and Convex shapes
- improvement of GJK solver
- fixes on Python bindings
1.5.4 - 2020-09-22
In this new release, the support of collision checking between Convex objects and HalfSpace have been enhanced and some minor fixes have been provided.
1.5.3 - 2020-08-31
This new release provides better CMake packaging and improved GJK algorithms.
1.5.2 - 2020-08-15
This release improves the packaging of the project and provides fixes for the GJK solver.
1.5.1 - 2020-08-06
This new release fixes packaging issues with precedent release 1.5.0. It also provides additional fixes in main collision/distance algorithms.
1.4.6 - 2020-06-10
This new release enhances the packaging of the project and allows the compilation of FCL on Windows systems.
1.4.5 - 2020-06-03
Changes in v1.4.5:
- Fix Python 3 doc generation
- Fix packaging of the project
- Compilation on Windows.
- [CMake] Install missing header.
- Add collide and distance prototype that update the GJK guess.
- Add support function cached guess in queries and merge query attribute.
- Add function to generate the convex hull.
- Add hint to the support function + Fix usage of GJK guess.
- [Python] Add constructor for class Convex.
- [Python] Bind functions to create BVHModel.
1.4.4 - 2020-04-29
Changes in 1.4.4:
- add MeshLoader::loadOctree
- fix generation of XML documentation
- fix generation of Doxygen documentation
1.4.3 - 2020-04-08
This new release fixes some packagings issues for OS X systems.
1.4.2 - 2020-04-04
Changes in v1.4.2:
- don’t require linking to eigenpy in .pc file.
1.4.1 - 2020-04-03
Changes in v1.4.1:
- Bug fix + prepare optimization of collision using GJK / EPA
- Add missing constructor for Transform3f
1.4.0 - 2020-04-03
Changes since v1.3.0:
- Improve code efficiency + use shared memory between Numpy and Eigen
- [Python] Doc and minor update + [C++] bugfix
- [Python] Fix bindings of CollisionResult.
- FIX: throw when no contact is available
- Minor fix and computational improvments
- [GJK/EPA] Fix bugs + Treat sphere as point and capsule as line segment.
- Fix boxSphereDistance
- Provide documentation for the Python bindings.
- Generate Python documentation from doxygen documentation.
- Fix issue when Python_EXECUTABLE is not defined
- update CMake packaging
1.3.0 - 2020-01-28
This new release comes with:
- the removing of the GJK solver
- the Python bindings build by default
- an improved documentation
- additional Python bindings
1.2.2 - 2019-12-17
This new Release improves the Python bindings and fixes an important bug when checking the collision between two Capsules.
Thanks to @rstrudel for this fix.
1.2.1 - 2019-12-09
This new release improves both the packaging of the project, which seems to be totally compatible with the new CMake linkage style. In addition, the bindings are now fully compatible with Pinocchio.
1.2.0 - 2019-11-22
Changes since v1.1.3:
- Add python bindings
- Update CMake
- Add version support
- New folder Internal for internal header
- Travis: update CI & change policy to only perform build in DEBUG mode on Bionic
- assimp: fix issue with recent version of assimp
- [bindings] [CMakeLists] Use .so for Mac and .pyd for Windows, fix #86
- Organize documentation
- [CMake] fix octomap detection
- [Minor] update CMake module + fix visibility of some methods.
- Enable Convex / Convex queries + Add Python bindings.
- Fix unit-tests and compilation
- [GJK] Fix GJK::encloseOrigin (fixes unit-tests)
- Improve GJK implementation + OBB overlap test + bug fixes
- Clean include BV/BVH/math/mesh_loader
1.1.3 - 2019-08-07
This new release enhances the compatibility of hpp-fcl with C++14 and more. This feature is requested for integration in Anaconda.
1.1.2 - 2019-08-05
This new release provides a fix in the parallelization of the computations and improves the packaging of the whole project.
1.0.2 - 2019-04-24
Changes since v1.0.1:
- obb: fix compatibility with Eigen 3.0.5
- [CI] octomap for osx
1.0.1 - 2019-02-20
- Fix CI on OSX
- Declare CachedMeshLoader::Key::operator<
- minor details
0.7.0 - 2019-01-31
This release is mainly here to allow the packaging of HPP-RBPRM. Another release will follow with more news.
0.6.0 - 2018-10-22
- Fix bug when OCTOMAP is not found
- move buildTrianglePlane and clipTriangle method from private to public
- Fix bug with “" symbols
- [CMake] Add flags related to Octomap in pkg-config file and remove FCL_HAVE_EIGEN
0.5.1 - 2017-10-02
Now Eigen is at the heart of linear algebra computations.
0.5 - 2017-03-17
First release
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged hpp-fcl at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.0.0 |
| License | BSD |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2024-10-10 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Wolfgang Merkt
Authors
HPP-FCL — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015. Since then, a large part of the code has been rewritten or removed (for the unused and untested part). The broad phase was reintroduced by Justin Carpentier in 2022 based on the FCL version 0.7.0.
If you use HPP-FCL in your projects and research papers, we would appreciate it if you’d cite it.
New features
Compared to the original FCL library, the main new features are:
- a dedicated and efficient implementation of the GJK algorithm (we do not rely anymore on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performances (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
This project is now used in many robotics frameworks such as Pinocchio, an open-source software that implements efficient and versatile rigid body dynamics algorithms, the Humanoid Path Planner, an open-source software for Motion and Manipulation Planning. HPP-FCL has also been recently used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, HPP-FCL implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performances, as depicted by the figures below.
On the one hand, we have benchmarked HPP-FCL against major software alternatives of the state of the art:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why.
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Pinocchio
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install hpp-fcl.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using HPP-FCL in C++:
#include "hpp/fcl/math/transform.h"
#include "hpp/fcl/mesh_loader/loader.h"
#include "hpp/fcl/BVH/BVH_model.h"
#include "hpp/fcl/collision.h"
#include "hpp/fcl/collision_data.h"
#include <iostream>
#include <memory>
// Function to load a convex mesh from a `.obj`, `.stl` or `.dae` file.
//
// This function imports the object inside the file as a BVHModel, i.e. a point cloud
// which is hierarchically transformed into a tree of bounding volumes.
// The leaves of this tree are the individual points of the point cloud
// stored in the `.obj` file.
// This BVH can then be used for collision detection.
//
// For better computational efficiency, we sometimes prefer to work with
// the convex hull of the point cloud. This insures that the underlying object
// is convex and thus very fast collision detection algorithms such as
// GJK or EPA can be called with this object.
// Consequently, after creating the BVH structure from the point cloud, this function
// also computes its convex hull.
std::shared_ptr<hpp::fcl::ConvexBase> loadConvexMesh(const std::string& file_name) {
hpp::fcl::NODE_TYPE bv_type = hpp::fcl::BV_AABB;
hpp::fcl::MeshLoader loader(bv_type);
hpp::fcl::BVHModelPtr_t bvh = loader.load(file_name);
bvh->buildConvexHull(true, "Qt");
return bvh->convex;
}
int main() {
// Create the hppfcl shapes.
// Hppfcl supports many primitive shapes: boxes, spheres, capsules, cylinders, ellipsoids, cones, planes,
// halfspace and convex meshes (i.e. convex hulls of clouds of points).
// It also supports BVHs (bounding volumes hierarchies), height-fields and octrees.
std::shared_ptr<hpp::fcl::Ellipsoid> shape1 = std::make_shared<hpp::fcl::Ellipsoid>(0.7, 1.0, 0.8);
std::shared_ptr<hpp::fcl::ConvexBase> shape2 = loadConvexMesh("../path/to/mesh/file.obj");
// Define the shapes' placement in 3D space
hpp::fcl::Transform3f T1;
T1.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T1.setTranslation(hpp::fcl::Vec3f::Random());
hpp::fcl::Transform3f T2 = hpp::fcl::Transform3f::Identity();
T2.setQuatRotation(hpp::fcl::Quaternion3f::UnitRandom());
T2.setTranslation(hpp::fcl::Vec3f::Random());
// Define collision requests and results.
//
// The collision request allows to set parameters for the collision pair.
// For example, we can set a positive or negative security margin.
// If the distance between the shapes is less than the security margin, the shapes
// will be considered in collision.
// Setting a positive security margin can be usefull in motion planning,
// i.e to prevent shapes from getting too close to one another.
// In physics simulation, allowing a negative security margin may be usefull to stabilize the simulation.
hpp::fcl::CollisionRequest col_req;
col_req.security_margin = 1e-1;
// A collision result stores the result of the collision test (signed distance between the shapes,
// witness points location, normal etc.)
hpp::fcl::CollisionResult col_res;
// Collision call
hpp::fcl::collide(shape1.get(), T1, shape2.get(), T2, col_req, col_res);
// We can access the collision result once it has been populated
std::cout << "Collision? " << col_res.isCollision() << "\n";
if (col_res.isCollision()) {
hpp::fcl::Contact contact = col_res.getContact(0);
// The penetration depth does **not** take into account the security margin.
// Consequently, the penetration depth is the true signed distance which separates the shapes.
// To have the distance which takes into account the security margin, we can simply add the two together.
std::cout << "Penetration depth: " << contact.penetration_depth << "\n";
std::cout << "Distance between the shapes including the security margin: " << contact.penetration_depth + col_req.security_margin << "\n";
std::cout << "Witness point on shape1: " << contact.nearest_points[0].transpose() << "\n";
std::cout << "Witness point on shape2: " << contact.nearest_points[1].transpose() << "\n";
std::cout << "Normal: " << contact.normal.transpose() << "\n";
}
// Before calling another collision test, it is important to clear the previous results stored in the collision result.
col_res.clear();
return 0;
}
Python example
Here is the C++ example from above translated in python using HPP-FCL’s python bindings:
import numpy as np
import hppfcl
# Optional:
# The Pinocchio library is a rigid body algorithms library and has a handy SE3 module.
# It can be installed as simply as `conda -c conda-forge install pinocchio`.
# Installing pinocchio also installs hpp-fcl.
import pinocchio as pin
def loadConvexMesh(file_name: str):
loader = hppfcl.MeshLoader()
bvh: hppfcl.BVHModelBase = loader.load(file_name)
bvh.buildConvexHull(True, "Qt")
return bvh.convex
if __name__ == "__main__":
# Create hppfcl shapes
shape1 = hppfcl.Ellipsoid(0.7, 1.0, 0.8)
shape2 = loadConvexMesh("../path/to/mesh/file.obj")
# Define the shapes' placement in 3D space
T1 = hppfcl.Transform3f()
T1.setTranslation(pin.SE3.Random().translation)
T1.setRotation(pin.SE3.Random().rotation)
T2 = hppfcl.Transform3f();
# Using np arrays also works
T1.setTranslation(np.random.rand(3))
T2.setRotation(pin.SE3.Random().rotation)
# Define collision requests and results
col_req = hppfcl.CollisionRequest()
col_res = hppfcl.CollisionResult()
# Collision call
hppfcl.collide(shape1, T1, shape2, T2, col_req, col_res)
# Accessing the collision result once it has been populated
print("Is collision? ", {col_res.isCollision()})
if col_res.isCollision():
contact: hppfcl.Contact = col_res.getContact(0)
print("Penetration depth: ", contact.penetration_depth)
print("Distance between the shapes including the security margin: ", contact.penetration_depth + col_req.security_margin)
print("Witness point shape1: ", contact.getNearestPoint1())
print("Witness point shape2: ", contact.getNearestPoint2())
print("Normal: ", contact.normal)
# Before running another collision call, it is important to clear the old one
col_res.clear()
Acknowledgments
The development of HPP-FCL is actively supported by the Gepetto team @LAAS-CNRS, the Willow team @INRIA and, to some extend, Eureka Robotics.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Added
Transform3f::RandomandTransform3f::setRandom(#584) - New feature: computation of contact surfaces for any pair of primitive shapes (triangle, sphere, ellipsoid, plane, halfspace, cone, capsule, cylinder, convex) (#574).
- Enhance Broadphase DynamicAABBTree to better handle planes and halfspace (#570)
-
#558:
- [internal] Removed dead code in
narrowphase/details.h(#558) - [internal] Removed specializations of methods of
GJKSolver. Now the specializations are all handled byShapeShapeDistanceinshape_shape_func.h. - [new feature] Added support for Swept-Sphere primitives (sphere, box, capsule, cone, ellipsoid, triangle, halfspace, plane, convex mesh).
- [internal] Removed dead code in
- [API change] Renamed default convergence criterion from
VDBtoDefault(#556) - Fixed EPA returning nans on cases where it could return an estimate of the normal and penetration depth. (#556)
- Fixed too low tolerance in GJK/EPA asserts (#554)
- Fixed
normal_and_nearest_pointstest (no need to have Eigen 3.4) (#553) - #549
- Optimize EPA: ignore useless faces in EPA’s polytope; warm-start support computation for
Convex; fix edge-cases witness points computation. - Add
Serializabletrait to transform, collision data, collision geometries, bounding volumes, bvh models, hfields. Collision problems can now be serialized from C++ and sent to python and vice versa. - CMake: allow use of installed jrl-cmakemodules (#564)
- Python: add id() support for geometries (#618).
Fixed
- Fix Fix serialization unit test when running without Qhull support (#611)
- Compiler warnings (#601, #605)
- CMake: fix assimp finder
- Don’t define GCC7 Boost serialization hack when
HPP_FCL_SKIP_EIGEN_BOOST_SERIALIZATIONis defined (#530) - Default parameters for narrowphase algorithms (GJK and EPA); fixed assertion checks that were sometimes failing in GJK simplex projection and BVH
collide(#531). - Created a new macro
HPP_FCL_ASSERTwhich behaves as an assert by default. When the optionHPP_FCL_TURN_ASSERT_INTO_EXCEPTIONis turned on, it replaces the macro by an exception (#533). Also fixed an EPA assert inGJKSolver. - Simplify internals of hpp-fcl (#535):
- Computing distance between 2 primitives shapes does not use a traversal node anymore.
- Removed successive mallocs in GJK/EPA when using an instance of
GJKSolvermultiple times. -
GJKSolvernow deals with all statuses of GJK/EPA. Some of these statuses represent a bad behavior of GJK/EPA and now trigger an assertion in Debug mode. Usefull for debugging these algos. - Logging was added with macros like
HPP_FCL_LOG_(INFO/DEBUG/WARNING/ERROR); hpp-fcl can now log usefull info when the preprocessor optionHPP_FCL_ENABLE_LOGGINGis enabled. - Deprecated
enable_distance_lower_boundinCollisionRequest; a lower bound on distance is always computed. - Deprecated
enable_nearest_pointsinDistanceRequest; they are always computed and are the points of the shapes that achieve a distance ofDistanceResult::min_distance. - Added
enable_signed_distanceflag inDistanceRequest(defaulttrue). Turn this of for better performance if only the distance when objects are disjoint is needed. - The internal collision and distance functions of hpp-fcl now use
CollisionRequest::enable_contactandDistanceRequest::enable_signed_distanceto control whether or not penetration information should be computed. There are many scenarios where we don’t need the penetration information and only want to know if objects are colliding and compute their distance only if they are disjoint. These flags allow the user to control the trade-off between performance vs. information of the library. - Fix convergence criterion of EPA; made GJK and EPA convergence criterion absolute + relative to scale to the shapes’ dimensions; remove max face/vertices fields from EPA (these can be deduced from the max number of iterations)
- Account for lateral borders in Height Fields model.
- Fix compilation error on recent APPLE compilers (#539).
- Fix printing of deprecated message (#540).
- Fix compilation with earlier Eigen version
- Fix compilation warning message
- Fix issue in Octomap.computeLocalAABB
- Fix unsupported function for contact_patch_matrix
- Fix Octomap dependency on ROS
2.4.5 - 2024-07-28
Fixed
- Fix Octomap dependency on ROS
2.4.4 - 2024-03-06
2.4.3 - 2024-03-06
Fixed
- updated cmake module to fix documentation generation
- test documentation in conda ci
2.4.2 - 2024-03-06
Fixed
- Fix CMAKE_INSTALL_{} path for installation (#543)
2.4.1 - 2024-01-23
Fixed
- CachedMeshLoader checks file last modification time.
- Fix call to clear methods for {Collision,Distance}Data inside init function (#509)
- CMake: fix submodule use in bindings in (#512)
- Fix bug in DynamicAABBTreeCollisionManager (see #514) in (#515)
Added
- In struct Contact
- Documentation of the members,
- initialization of normal, closest points and contact point in constructors
- method getDistanceToCollision
- New variant of GJK (PolyakAcceleration).
- Specialization of distance computation between
- Sphere and Capsule,
- Ellipsoid and Halfspace,
- Ellipsoid and Plane.
- Collision computation between Octree and HeightField.
Changed
- Matrixx3f and Matrixx3i become row major.
- Use shared pointers to vectors instead of arrays for vertices and triangles in class BVHModelBase.
Removed
- members related epa in class QueryRequest
2.4.0 - 2023-11-27
Added
- Add method to
CollisionObjectto getCollisionGeometryraw pointer
Fixed
- Fix RPATH computation on OSX
- Fix Python stubs generation on Windows
2.3.7 - 2023-11-15
What’s Changed
2.3.6 - 2023-09-30
What’s Changed
- Update ROS_DISTRO by @jcarpent (#442)
- Add citations by @jcarpent (#449)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#444)
- [WIP] Debug by @jcarpent (#455)
- CMake: require >= 3.10 by @nim65s (#453)
- core: fix SaPCollisionManager::empty() by @rujialiu (#454)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#452)
New Contributors
2.3.5 - 2023-07-11
What’s Changed
- Fix compilation warning by @jcarpent (#434)
- Fix parsing of doxygen doc by @jcarpent (#439)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#438)
2.3.4 - 2023-06-01
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#414)
- Fix conversion warning by @wxmerkt (#417)
- Add missing boost include by @nim65s (#418)
- ci: update macos-linux-pip by @nim65s (#419)
- Modernize Cmake use by @nim65s (#420)
- tests: use boost::filesystem by @nim65s (#424)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#425)
- Update minimal Python version by @jcarpent (#427)
- Sync submodule cmake by @jcarpent (#430)
- Sync submodule CMake by @jcarpent (#431)
2.3.3 - 2023-05-09
What’s Changed
2.3.2 - 2023-04-27
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#391)
- Sync submodule cmake by @jcarpent (#393)
- Topic/rpath by @nim65s (#394)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#396)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#399)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#402)
- Sync submodule cmake by @jcarpent (#406)
2.3.1 - 2023-03-25
What’s Changed
- Remove useless call to /proc/cpuinfo by @jcarpent (#385)
- Add pip CI by @nim65s (#386)
- [GJKSolver] Fix missing switch case in result status of GJK by @lmontaut (#387)
- Sync submodule cmake by @jcarpent (#388)
2.3.0 - 2023-03-17
What’s Changed
- [CI] Remove EOL Galactic by @wxmerkt (#366)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#367)
- Sync submodule cmake by @jcarpent (#368)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#369)
- Adding EarlyStopped flag in GJK by @lmontaut (#371)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#373)
- Update CI by @jcarpent (#374)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#375)
- Skip test if BUILD_TESTING is OFF by @jcarpent (#378)
2.2.0 - 2022-12-12
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#358)
- Extract checks if AABB overlap by @jmirabel (#360)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#361)
- Sync submodule CMake by @jcarpent (#362)
- Add support of Pickling by @jcarpent (#363)
2.1.4 - 2022-10-24
What’s Changed
- Sync submodule CMake by @jcarpent (#352)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#353)
2.1.3 - 2022-09-13
What’s Changed
- Minor boost cleanup by @pantor (#331)
- [CI] Activate ROS2 configurations by @wxmerkt (#332)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#337)
- Sync submodule cmake by @jcarpent (#341)
- Fix shapeIntersect when for EPA FallBack by @jcarpent (#342)
- Fix findAssimp on Windows by @jcarpent (#345)
- Sync submodule cmake by @jcarpent (#347)
New Contributors
2.1.2 - 2022-08-01
What’s Changed
- core: add EPA::FallBack condition to shapeDistance computation by @lmontaut (#325)
- CMake: update to eigenpy 2.7.10 by @nim65s (#327)
2.1.1 - 2022-07-25
What’s Changed
- cmake: relocatable package for recent CMake versions by @nim65s (#319)
- ROS2/Colcon integration by @wxmerkt (#321)
2.1.0 - 2022-07-13
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#288)
- Add enum helpers by @jcarpent (#290)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#294)
- Ellipsoids in collision & distance matrices by @lmontaut (#295)
- doc: simplex projection in GJK class. by @lmontaut (#296)
- Feature: Nesterov acceleration for GJK by @lmontaut (#289)
- Add more testing to broadphase by @jcarpent (#298)
- Feature: adding convergence criterions for GJK algorithm by @lmontaut (#299)
- Sync submodule cmake by @jcarpent (#300)
- Reorder triangles when computing convex hulls by @lmontaut (#301)
- Exposing gjk utils by @lmontaut (#302)
- Fix assert precision in GJK by @jcarpent (#304)
- Simplify GJKSolver settings by @jcarpent (#305)
- Add CollisionResult::nearest_points by @jcarpent (#303)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#306)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#309)
- Fix minimal value for GJK::distance_upper_bound by @jcarpent (#310)
- Fix incoherent overlap by @jcarpent (#311)
- Expose shared_ptr
by [@Jiayuan-Gu](https://github.com/Jiayuan-Gu) ([#314](https://github.com/humanoid-path-planner/hpp-fcl/pull/314)) - test/gjk_convergence_criterion: Add check on GJK::Status by @wxmerkt (#315)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#316)
- Handle negative security margin by @jcarpent (#312)
New Contributors
- @Jiayuan-Gu made their first contribution (#314)
2.0.1 - 2022-04-15
This PR mainly fixes packaging issues and removes compilation warnings.
What’s Changed
- Zero warnings by @wxmerkt (#282)
- Sync submodule cmake by @jcarpent (#283)
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci (#284)
- Activate python3-pylatexenc dependency by @wxmerkt (#286)
- Comment pylatexenc again since it’s not available on the buildfarm by @wxmerkt (#287)
New Contributors
- @pre-commit-ci made their first contribution (#284)
2.0.0 - 2022-04-06
This new release reintroduces the full support of Broad phase within hpp-fcl while also enforcing C++11 as minimal standard.
What’s Changed
- Add Ellipsoid by @jcarpent (#259)
- Removing comment about inflation. by @lmontaut (#261)
- Reintroduce broadphase by @jcarpent (#260)
- Simplify CollisionObject by removing cgeom_const by @jcarpent (#263)
- Address some warnings by @wxmerkt (#262)
- Fix missing copy of aabb_local in CollisionGeometry by @jcarpent (#264)
- use std::shared_ptr, fix #218 by @nim65s (#266)
- Fix broadphase warnings for clang (some conversion remain for g++) by @wxmerkt (#268)
- [ComputeCollision] Return no collision if security_margin is set to -inf by @florent-lamiraux (#271)
- tests: remove link to boost unit test framework by @nim65s (#270)
- Fix computation of aabb_center by @jcarpent (#273)
- Add operator== and operator!= to CollisionGeometry by @jcarpent (#274)
- Merge pull request #276 from humanoid-path-planner/patch-release-1.8.1 by @jcarpent (#277)
- Fix some missing features in base classes by @jcarpent (#275)
- Add operator{==,!=} to CollisionObject by @jcarpent (#278)
- Configure and apply pre-commit by @jcarpent (#280)
- Fix DistanceCallBackBaseWrapper by @jcarpent (#281)
New Contributors
1.8.1 - 2022-03-20
What’s Changed
1.8.0 - 2022-02-08
What’s Changed
- [CMake] Qhull is a private dependency by @nim65s (#247)
- Remove useless warnings by @jcarpent (#248)
- fix submodule url by @nim65s (#246)
- Remove warnings and add missing noalias by @jcarpent (#249)
- Function makeOctree returns a shared pointer by @florent-lamiraux (#254)
- Add support of HeightField by @jcarpent (#251)
- [OcTree] Add method to save octree in obj file. by @florent-lamiraux (#256)
- Fix C++98 compatibility by @jcarpent (#258)
1.7.8 - 2021-10-30
What’s Changed
- Fix conversion by @jcarpent (#242)
- Fix exposition of vertices by @jcarpent (#243)
- Enhance Convex exposition by @jcarpent (#244)
- Sync submodule cmake by @jcarpent (#245)
1.7.7 - 2021-09-13
This new release fixes several bugs within the framework.
1.7.6 - 2021-09-08
This new release improves the packaging of the project and integrates the Stub generation of Python bindings.
1.7.5 - 2021-07-30
This new release provides extended API exposition in Python, removes some code related to CDD while also trying to rely on the QHULL version present on the system.
1.7.4 - 2021-06-11
This release fixes several bugs:
- correct update of the distance lower bound
- fix memory footprint computation
while also removing the support of Travis CI.
1.7.3 - 2021-05-26
This new release provides:
- fixes of LINE and POINTS when loading meshes with assimp
- removing of various warnings
- computation of memory footprint for geometries
1.7.2 - 2021-04-19
This new release improves the loading of meshes using Assimp by automatically removing degenerated LINES and POINTS.
1.7.1 - 2021-04-02
This new release reduces the impact of timers on the computations. This should be used with care and can be enabled by setting the correct flag to true in the QueryRequest.
1.7.0 - 2021-03-31
This new release provides:
- extended support for serialization
- timing of the collision/distance computations
- helpers to build octree
- various bug fixes and interface improvements
1.6.0 - 2020-10-06
This new release provides:
- functors for evaluating Collision and Distances (faster call)
- extended support of v142 compiler
- support of collision check between HalfSpace and Convex shapes
- improvement of GJK solver
- fixes on Python bindings
1.5.4 - 2020-09-22
In this new release, the support of collision checking between Convex objects and HalfSpace have been enhanced and some minor fixes have been provided.
1.5.3 - 2020-08-31
This new release provides better CMake packaging and improved GJK algorithms.
1.5.2 - 2020-08-15
This release improves the packaging of the project and provides fixes for the GJK solver.
1.5.1 - 2020-08-06
This new release fixes packaging issues with precedent release 1.5.0. It also provides additional fixes in main collision/distance algorithms.
1.4.6 - 2020-06-10
This new release enhances the packaging of the project and allows the compilation of FCL on Windows systems.
1.4.5 - 2020-06-03
Changes in v1.4.5:
- Fix Python 3 doc generation
- Fix packaging of the project
- Compilation on Windows.
- [CMake] Install missing header.
- Add collide and distance prototype that update the GJK guess.
- Add support function cached guess in queries and merge query attribute.
- Add function to generate the convex hull.
- Add hint to the support function + Fix usage of GJK guess.
- [Python] Add constructor for class Convex.
- [Python] Bind functions to create BVHModel.
1.4.4 - 2020-04-29
Changes in 1.4.4:
- add MeshLoader::loadOctree
- fix generation of XML documentation
- fix generation of Doxygen documentation
1.4.3 - 2020-04-08
This new release fixes some packagings issues for OS X systems.
1.4.2 - 2020-04-04
Changes in v1.4.2:
- don’t require linking to eigenpy in .pc file.
1.4.1 - 2020-04-03
Changes in v1.4.1:
- Bug fix + prepare optimization of collision using GJK / EPA
- Add missing constructor for Transform3f
1.4.0 - 2020-04-03
Changes since v1.3.0:
- Improve code efficiency + use shared memory between Numpy and Eigen
- [Python] Doc and minor update + [C++] bugfix
- [Python] Fix bindings of CollisionResult.
- FIX: throw when no contact is available
- Minor fix and computational improvments
- [GJK/EPA] Fix bugs + Treat sphere as point and capsule as line segment.
- Fix boxSphereDistance
- Provide documentation for the Python bindings.
- Generate Python documentation from doxygen documentation.
- Fix issue when Python_EXECUTABLE is not defined
- update CMake packaging
1.3.0 - 2020-01-28
This new release comes with:
- the removing of the GJK solver
- the Python bindings build by default
- an improved documentation
- additional Python bindings
1.2.2 - 2019-12-17
This new Release improves the Python bindings and fixes an important bug when checking the collision between two Capsules.
Thanks to @rstrudel for this fix.
1.2.1 - 2019-12-09
This new release improves both the packaging of the project, which seems to be totally compatible with the new CMake linkage style. In addition, the bindings are now fully compatible with Pinocchio.
1.2.0 - 2019-11-22
Changes since v1.1.3:
- Add python bindings
- Update CMake
- Add version support
- New folder Internal for internal header
- Travis: update CI & change policy to only perform build in DEBUG mode on Bionic
- assimp: fix issue with recent version of assimp
- [bindings] [CMakeLists] Use .so for Mac and .pyd for Windows, fix #86
- Organize documentation
- [CMake] fix octomap detection
- [Minor] update CMake module + fix visibility of some methods.
- Enable Convex / Convex queries + Add Python bindings.
- Fix unit-tests and compilation
- [GJK] Fix GJK::encloseOrigin (fixes unit-tests)
- Improve GJK implementation + OBB overlap test + bug fixes
- Clean include BV/BVH/math/mesh_loader
1.1.3 - 2019-08-07
This new release enhances the compatibility of hpp-fcl with C++14 and more. This feature is requested for integration in Anaconda.
1.1.2 - 2019-08-05
This new release provides a fix in the parallelization of the computations and improves the packaging of the whole project.
1.0.2 - 2019-04-24
Changes since v1.0.1:
- obb: fix compatibility with Eigen 3.0.5
- [CI] octomap for osx
1.0.1 - 2019-02-20
- Fix CI on OSX
- Declare CachedMeshLoader::Key::operator<
- minor details
0.7.0 - 2019-01-31
This release is mainly here to allow the packaging of HPP-RBPRM. Another release will follow with more news.
0.6.0 - 2018-10-22
- Fix bug when OCTOMAP is not found
- move buildTrianglePlane and clipTriangle method from private to public
- Fix bug with “" symbols
- [CMake] Add flags related to Octomap in pkg-config file and remove FCL_HAVE_EIGEN
0.5.1 - 2017-10-02
Now Eigen is at the heart of linear algebra computations.
0.5 - 2017-03-17
First release
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |