
Package Summary
| Tags | No category tags. |
| Version | 3.3.1 |
| License | BSD-2 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stack-of-tasks/pinocchio.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-01-13 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Justin Carpentier
- Wolfgang Merkt
Authors
![]()
![]()



![]()
![]()
Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone’s algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
Pinocchio was first tailored for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.). It is built upon Eigen for linear algebra and FCL for collision detection. Pinocchio comes with a Python interface for fast code prototyping, directly accessible through Conda.
Pinocchio is now at the heart of various robotics software as Crocoddyl, an open-source and efficient Differential Dynamic Programming solver for robotics, the Stack-of-Tasks, an open-source and versatile hierarchical controller framework or the Humanoid Path Planner, open-source software for Motion and Manipulation Planning.
If you want to learn more about Pinocchio internal behaviors and main features, we invite you to read the related paper and the online documentation.
If you want to dive into Pinocchio directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
Table of contents
- Table of contents
- Introducing Pinocchio 3
- Pinocchio main features
- Documentation
- Examples
- Tutorials
- Pinocchio continuous integrations
- Performances
- Ongoing developments
- Installation
- Visualization
- Citing Pinocchio
- Questions and Issues
- Credits
- Open-source projects relying on Pinocchio
- Acknowledgments
Introducing Pinocchio 3
Pinocchio3 is the latest major release of Pinocchio. It comes with multiple new features, such as:
- Sparse constrained dynamics and its analytical derivatives
- Full support of closed-loop mechanisms
- State-of-the-art frictional contact solvers
- Low-complexity constrained articulated body algorithms
- Full support of multiple-precision floating-point (MPFR) in Python and C++
- Full CasADi support in Python and C++
- Increased support of CppAD and CppADCodeGen
- New SDF and MJCF parsers
- and much more.
Pinocchio main features
Pinocchio is fast:
- C++ template library,
- cache friendly,
- automatic code generation support is available via CppADCodeGen.
Pinocchio is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- support multiple precision arithmetic via Boost.Multiprecision or any similar framework,
- computations of kinematic and dynamic regressors for system identification and more,
- and much more with the support of modern and open-source Automatic Differentiation frameworks like CppAD or CasADi.
Pinocchio is flexible:
- header only,
- C++ 98/03/11/14/17/20 compliant.
Pinocchio is extensible. Pinocchio is multi-thread friendly. Pinocchio is reliable and extensively tested (unit-tests, simulations, and real-world robotics applications). Pinocchio is supported and tested on Windows, Mac OS X, Unix, and Linux (see build status here).
Documentation
The online Pinocchio documentation of the last release is available here. A cheat sheet pdf with the main functions and algorithms can be found here.
Examples
In the examples directory, we provide some basic examples of using Pinocchio in Python. Additional examples introducing Pinocchio are also available in the documentation.
Tutorials
Pinocchio comes with a large bunch of tutorials aiming at introducing the basic tools for robot control. Tutorial and training documents are listed here. You can also consider the interactive Jupyter notebook set of tutorials developed by Nicolas Mansard and Yann de Mont-Marin.
Pinocchio continuous integrations
Pinocchio is constantly tested for several platforms and distributions, as reported below:
| CI on ROS | |
| CI on Linux via APT | |
| CI on OSX via Conda | |
| CI on Windows via Conda | |
| CI on Linux via Robotpkg |  |
Performances
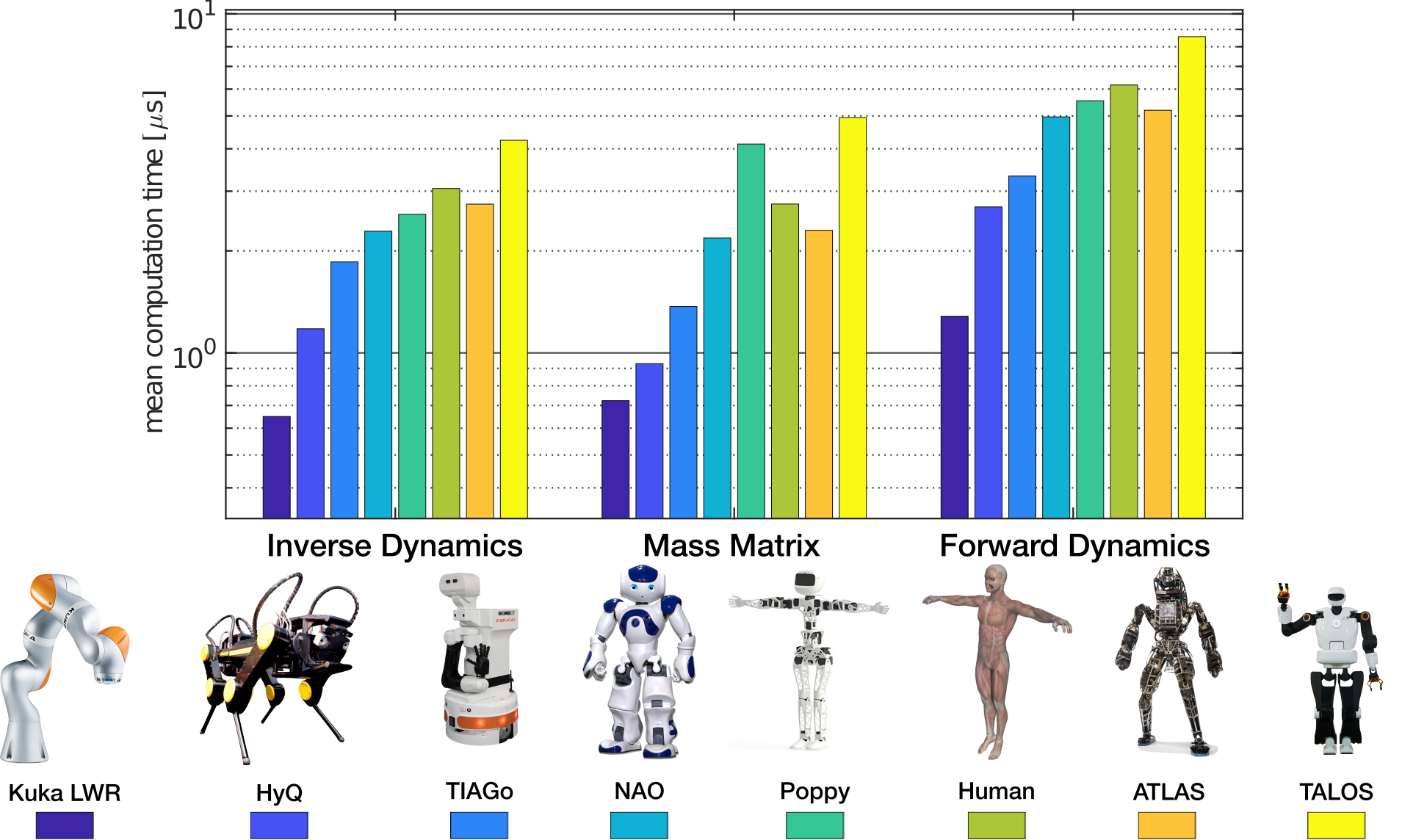
Pinocchio exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, Pinocchio can unroll most of the computations directly at compile time, allowing to achieve impressive performances for a large range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical paper. In addition, the introspection may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
Ongoing developments
If you want to follow the current developments, you can directly refer to the devel branch. The master branch only contains the latest release. Any new Pull Request should then be submitted on the devel branch.
Installation
Pinocchio can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the installation procedure.
Conda
You simply need this simple line:
conda install pinocchio -c conda-forge
ROS
Pinocchio is also deployed on ROS. You may follow its deployment status below.
If you’re interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA. Here, you can install Pinocchio using:
sudo apt install ros-$ROS_DISTRO-pinocchio
This installs Pinocchio with HPP-FCL support and with Python bindings. You can then use Pinocchio in your ROS packages by:
- Depending on Pinocchio in your
package.xmlconfig (<depend>pinocchio</depend>) - Including Pinocchio via CMake (
find_package(pinocchio REQUIRED)) and linking against Pinocchio (target_link_libraries(my_library pinocchio::pinocchio))
We include support and hooks to discover the package for both ROS 1 and ROS 2. Examples can be found at the following repositories:
Please note that we always advise including the pinocchio/fwd.hpp header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 1 | ROS 2 | |||
|---|---|---|---|---|
| Melodic | Foxy | |||
| Noetic | Galactic | |||
| Humble | ||||
| Rolling |
Visualization
Pinocchio provides support for many open-source and free visualizers:
- Gepetto Viewer: a C++ viewer based on OpenSceneGraph with Python bindings and Blender export. See here for a C++ example on mixing Pinocchio and Gepetto Viewer.
- Meshcat: supporting visualization in Python and which can be embedded inside any browser.
- Panda3d: supporting visualization in Python and which can be embedded inside any browser.
- RViz: supporting visualization in Python and which can interact with other ROS packages.
Many external viewers can also be integrated. For more information, see the example here.
Citing Pinocchio
To cite Pinocchio in your academic research, please consider citing the software paper and use the following BibTeX entry:
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
And the following one for the link to the GitHub codebase:
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
Citing specific algorithmic contributions
Pinocchio goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning and control. Pinocchio provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc. If you use these algorithms, please consider citing them in your research articles.
- Le Lidec, Q., Montaut, L. & Carpentier, J. (2024, July). From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach. In RSS 2024-Robotics: Science and Systems.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). GJK++: Leveraging Acceleration Methods for Faster Collision Detection. IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). Constrained Articulated Body Dynamics Algorithms. Under review.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). Differentiable collision detection: a randomized smoothing approach. In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2023). Contact models in robotics: a comparative analysis. Under review.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). Collision Detection Accelerated: An Optimization Perspective. In Robotics: Science and Systems (RSS 2O22).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). Proximal and sparse resolution of constrained dynamic equations. In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018).
Questions and Issues
Do you have a question or an issue? You may either directly open a new question or a new issue or, directly contact us via the mailing list pinocchio@inria.fr.
Credits
The following people have been involved in the development of Pinocchio and are warmly thanked for their contributions:
- Justin Carpentier (Inria): main developer and manager of the project
- Nicolas Mansard (LAAS-CNRS): initial project instructor
- Guilhem Saurel (LAAS-CNRS): continuous integration and deployment
- Joseph Mirabel (Eureka Robotics): Lie groups and hpp-fcl implementation
- Antonio El Khoury (Wandercraft): bug fixes
- Gabriele Buondono (LAAS-CNRS): features extension, bug fixes, and Python bindings
- Florian Valenza (Astek): core developments and hpp-fcl support
- Wolfgang Merkt (University of Oxford): ROS integration and support
- Rohan Budhiraja (LAAS-CNRS): features extension
- Loïc Estève (Inria): Conda integration and support
- Igor Kalevatykh (Inria): Panda3d viewer support
- Matthieu Vigne (Wandercraft): MeshCat viewer support
- Robin Strudel (Inria): features extension
- François Keith (CEA): Windows support
- Sarah El Kazdadi (Inria): multi-precision arithmetic support
- Nicolas Torres Alberto (Inria): features extension
- Etienne Arlaud (Inria): RViz viewer support
- Wilson Jallet (LAAS-CNRS/Inria): extension of Python bindings
- Fabian Schramm (Inria): core developper
- Shubham Singh (UT Austin): second-order inverse dynamics derivatives
- Stéphane Caron (Inria): core developper
- Joris Vaillant (Inria): core developer and manager of the project
- Sebastian Castro (The AI Institute): MeshCat viewer feature extension
- Lev Kozlov: Kinetic and potential energy regressors
- Megane Millan (Inria): Features extension and core developer
- Simeon Nedelchev: Pseudo inertia and Log-Cholesky parametrization
- Ajay Sathya (Inria): core developer
If you have participated in the development of Pinocchio, please add your name and contribution to this list.
Open-source projects relying on Pinocchio
- Crocoddyl: A software to realize model predictive control for complex robotics platforms.
- TSID: A software that implements a Task Space Inverse Dynamics QP.
- HPP: A SDK that implements motion planners for humanoids and other robots.
- Jiminy: A simulator based on Pinocchio.
- ocs2: A toolbox for Optimal Control for Switched Systems (OCS2)
- TriFingerSimulation: TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- Casadi_Kin_Dyn: IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- PyRoboPlan: An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- ProxSuite-NLP: A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- Aligator: A versatile and efficient framework for constrained trajectory optimization.
- Simple: The Simple Simulator: Simulation Made Simple.
- LoIK: Low-Complexity Inverse Kinematics.
Acknowledgments
The development of Pinocchio is actively supported by the Gepetto team @LAAS-CNRS and the Willow team @INRIA.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Add parsing meshes with vertices for MJCF format (#2537)
Fixed
- Fix mjcf Euler angle parsing: use xyz as a default value for eulerseq compiler option (#2526)
- Fix variable naming in Python (#2530)
- Fix aba explicit template instantiation (#2541)
- CMake: fix RPATH on macos (#2546)
- Fix aba explicit template instantiation (#2541)
- Fix mjcf parsing of keyframe qpos with newlines (#2535)
- Fix sites parsing for MJCF format (#2548)
3.3.1 - 2024-12-13
Added
- Add
pinocchio_python_parsertarget (#2475)
Fixed
- Fix mjcf parsing of armature and of the default tag in models (#2477)
- Fix undefined behavior when using the site attribute in mjcf (#2477)
- Fix the type of image paths when loading textures in the meshcat visualizer (#2478)
- Fix meshcat examples ([#2503])[https://github.com/stack-of-tasks/pinocchio/pull/2503]
- Fix
pinocchio-test-cpp-parallel-geometrywhen built with Coal (#2502) - Fix scaling support for meshcat (#2511)
Changed
- On GNU/Linux and macOS, hide all symbols by default (#2469)
- Build
pinocchio_defaultwith collision features (#2517)
3.3.0 - 2024-11-06
Added
- Default visualizer can be changed with
PINOCCHIO_VIEWERenvironment variable (#2419) - Add more Python and C++ examples related to inverse kinematics with 3d tasks (#2428)
- Add parsing of equality/connect tag for closed-loop chains for MJCF format (#2413)
- Add compatibility with NumPy 2
__array__API (#2436) - Added argument to let users decide of root joint name when parsing models (urdf, mjcf, sdf) (#2402)
- Allow use of
pathlib.Path | strfor paths in python bindings (#2431) - Add Pseudo inertia and Log-cholesky parametrization (#2296)
- Add Pixi support (#2459)
Fixed
- Fix linkage of Boost.Serialization on Windows (#2400)
- Fix mjcf parser appending of inertias at root joint (#2403)
- Fix unit tests with GCC 13.3 (#2406
- Fix class abstract error for Rviz viewer (#2425)
- Fix compilation issue with MSCV and C++17 (#2437)
- Fix
pinocchio-test-py-robot_wrapperwhen building with SDF and collision support (#2437) - Fix crash when calling
Inertia::FromDynamicParametersin Python with wrong vector size (#2296) - Fix
examples/cassie-simulation.pyandexamples/talos-simulation.py(#2443) - Fix build with CppAd 2024 (#2459)
- Fix
pinocchio-test-cpp-mjcfunittest with Boost 1.86 (#2459) - Fix
pinocchio-test-cpp-constraint-variantsuninitialized values (#2459) - Fix mixing library symbols between Pinocchio scalar bindings (#2459)
- Fix bug for get{Joint,Frame}JacobianTimeVariation (#2466)
Changed
- Modernize python code base with ruff (#2418)
- Does not create a root_joint frame from parsed models (urdf, mjcf and sdf) when no root joint is provided (#2402)
3.2.0 - 2024-08-27
Fixed
- Append pinocchio optional libraries into pkg-config file (#2322)
- Fixed support of DAE meshes with MeshCat (#2331)
- Fixed pointer casts in urdf parser (#2339)
- Remove CMake CMP0167 warnings (#2347)
- Fixed urdfdom in ROS packaging (#2341)
- Fixed overview-urdf cpp example (#2384)
- Fixed mjcf model without a base link parsing (#2386)
- Fixed talos-simulation.py, simulation-contact-dynamics.py and simulation-closed-kinematic-chains.py examples (#2392)
Added
- Add getMotionAxis method to helical, prismatic, revolute and ubounded revolute joint (#2315)
- Add initial compatiblity with coal (coal needs
-DCOAL_BACKWARD_COMPATIBILITY_WITH_HPP_FCL=ON) (#2323) - Add compatibility with jrl-cmakemodules workspace (#2333)
- Add
collision_colorparameter toMeshcatVisualizer.loadViewerModel(#2350) - Add
BuildFromMJCFfunction to RobotWrapper (#2363) - Add more CasADi examples (#2388)
Removed
- Remove deprecated headers related to joint constraints (#2382)
Changed
- Use eigenpy to expose
GeometryObject::meshMaterialvariant (#2315) - GepettoViewer is no more the default viewer for RobotWrapper (#2331)
- Modernize python code base with ruff (#2367)
- Restructure CppAD and CasADi examples (#2388)
- Enhance and fix CppAD benchmarks outputs (#2393)
3.1.0 - 2024-07-04
Fixed
- Fix
appendModelwhen joints after the base are in parallel (#2295) - Fix
appendModelbuild when called with template arguments different than the ones fromcontext(#2284) - Fix
TransformRevoleTpl::rotationandTransformHelicalTpl::rotationbuild (#2284) - Fix compilation issue for Boost 1.85 (#2255)
- Fix python bindings of
contactInverseDynamics(#2263) - Deactivate
BUILD_WITH_LIBPYTHONwhen building with PyPy (#2274) - Fix Python bindings cross building with
hpp-fcl(#2288) - Fix build issue on Windows when a deprecated header is included (#2292)
- Fix build issue on Windows when building in Debug mode (#2292)
- Fix visualization of meshes in meshcat (#2294)
- Fix Anymal simulation test (#2299)
- Fix contact derivatives and impulse dynamics tests (#2300)
- Fix CMake compatibility with old console_bridge version (#2312)
Added
- Python unittest for
contactInverseDynamicsfunction (#2263) - Added helper functions to return operation count of CasADi functions. (#2275)
- C++ and Python unittest for
dIntegrateTransportto check vector transport and its inverse (#2273) - Add kinetic and potential energy regressors (#2282)
Removed
- Remove header
list.hppinclude for bindings of model and rnea (#2263)
3.0.0 - 2024-05-27
Added
Automatic differentiation
- Full support of Casadi in the main library by @jcarpent and @ManifoldFR
- Full support of Casadi for Python bindings by @jcarpent
- Full support of Boost.Multiprecision in the main library by @jcarpent
- Full support of Boost.Multiprecision for Python bindings by @jcarpent
- Full support of CppAD and CppADCodeGen in the main library by @jcarpent
- Full support of CppAD and CppADCodeGen for Python bindings by @jcarpent and @proyan
Core features
- Full support of constrained dynamical systems by @jcarpent
- Full support of derivatives of constrained dynamical systems by @jcarpent and @proyan
- Extended algorithms for constrained dynamics: constrained ABA, PV solvers, etc. by @jcarpent and @AjSat
- Add frictional contact solvers (PGS, ADMM) by @jcarpent
- Add contact inverse dynamics by @quentinll
- Full support of broadphase algorithms in Pinocchio by @jcarpent
- New joint supports (Helicoidal, Universal) by @fabinsch and @MegMll
- Add new algorithms for supporting Delassus factorizations for sparse, dense and tree-based systems by @jcarpent
- Add full OpenMP support for many algorithms (ABA, RNEA, collision detection, etc.) by @jcarpent
- Full support of GeometryModel, GeometryObject serialization by @jcarpent
- Extended support of Meshcat by @jcarpent, @ManifoldFR and @jorisv
- Extended testing and support of Lie groups operations by @jcarpent and @ManifoldFR
- Full support of AVX512 and AVX2 vectorization for Python bindings by @jcarpent
- Full support of the robot armature in RNEA, CRBA and ABA
- Extended formulation of CRBA and ABA using WORLD convention for reduced computational burden in the derivative algorithms
Parsers
Extra Algorithms
- Added reachable workspace computation and vizualisation in collaboration with @askuric based on pycapacity by @MegMll and @jorisv
Packaging
- Full support of template instantiation by @fabinsch and @jorisv
- Enhance support for Windows-based systems by @jorisv
- Splitting of the Pinocchio into sub-library for isolation by @jorisv
Compatibility
- Add
PINOCCHIO_ENABLE_COMPATIBILITY_WITH_VERSION_2define to activate compatibility with Pinocchio 2 API
Changed
C++
- Change minimum required version of C++ to C++11. Check for compatibility here: https://en.cppreference.com/w/cpp/compiler_support/11
- Replace
pinocchio::BiasZeroTplbypinocchio::MotionZeroTpl - Replace
pinocchio::fusion::JointVisitorBasebypinocchio::fusion::JointUnaryVisitorBase - Replace
pinocchio::fusion::push_frontbypinocchio::fusion::append - Replace
pinocchio::regressor::computeStaticRegressorbypinocchio::computeStaticRegressor - Replace
pinocchio::jointJacobianbypinocchio::computeJointJacobian - Replace
pinocchio::frameJacobianbypinocchio::computeFrameJacobian - Replace
pinocchio::framesForwardKinematicsbypinocchio::updateFramePlacements - Replace
pinocchio::kineticEnergybypinocchio::computeKineticEnergy - Replace
pinocchio::potentialEnergybypinocchio::computePotentialEnergy - Replace
pinocchio::computeCentroidalDynamicsbypinocchio::computeCentroidalMomentumandpinocchio::computeCentroidalMomentumTimeVariation - Replace
pinocchio::centerOfMass(const ModelTpl&, DataTpl&, int, bool)bypinocchio::centerOfMass(const ModelTpl&, DataTpl&, KinematicLevel, bool) - Replace
pinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, int)bypinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, KinematicLevel) - Replace
pinocchio/algorithm/dynamics.hppbypinocchio/algorithm/constrained-dynamics.hpp - Change the order of arguments in some of
pinocchio::GeometryObject’s constructors - Deprecate
pinocchio/algorithm/parallel/geometry.hppmoved atpinocchio/collision/parallel/geometry.hpp - Deprecate
pinocchio/spatial/fcl-pinocchio-conversions.hppmoved atpinocchio/collision/fcl-pinocchio-conversions.hpp - Deprecate
pinocchio/parsers/sample-models.hppmoved atpinocchio/multibody/sample-models.hpp - Deprecate
pinocchio/math/cppad.hppmoved atpinocchio/autodiff/cppad.hpp - Deprecate
pinocchio/math/cppadcg.hppmoved atpinocchio/autodiff/cppadcg.hpp - Deprecate
pinocchio/math/casadi.hppmoved atpinocchio/autodiff/casadi.hpp - Deprecate
pinocchio::FrameTpl::parentreplaced bypinocchio::FrameTpl::parentJoint - Deprecate
pinocchio::FrameTpl::previousFramereplaced bypinocchio::FrameTpl::parentFrame - Deprecate
pinocchio/algorithm/contact-dynamics.hppalgorithms replaced bypinocchio/algorithm/constrained-dynamics.hpp
Python
- Replace
pinocchio.utils.skewbypinocchio.skew - Replace
pinocchio.utils.se3ToXYZQUATbypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.utils.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.robot_wrapper.RobotWrapper.frameClassicAccelerationbypinocchio.robot_wrapper.RobotWrapper.frameClassicalAcceleration - Replace
pinocchio.robot_wrapper.RobotWrapper.jointJacobianbypinocchio.robot_wrapper.RobotWrapper.computeJointJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.frameJacobianbypinocchio.robot_wrapper.RobotWrapper.computeFrameJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.initDisplaybypinocchio.robot_wrapper.RobotWrapper.initViewer - Replace
pinocchio.robot_wrapper.RobotWrapper.loadDisplayModelbypinocchio.robot_wrapper.RobotWrapper.loadViewerModel - Replace
pinocchio.deprecated.se3ToXYZQUATtuplebypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.deprecated.se3ToXYZQUATbypinocchio.SE3ToXYZQUAT - Replace
pinocchio.deprecated.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.deprecated.buildGeomFromUrdf(model, filename, [str])bypinocchio.buildGeomFromUrdf(model, filename, type, package_dirs, mesh_loader) - Replace
pinocchio.rpy.npToTTuplebypinocchio.utils.npToTTuple - Replace
pinocchio.rpy.npToTuplebypinocchio.utils.npToTuple - Replace
pinocchio.jacobianSubtreeCoMJacobianbypinocchio.jacobianSubtreeCenterOfMass
Removed
C++
- Remove
pinocchio::setGeometryMeshScales - Remove some
pinocchio::forwardDynamicssignatures - Remove some
pinocchio::impulseDynamicssignatures
Python
- Remove
pinocchio.utils.cross - Remove
pinocchio.robot_wrapper.RobotWrapper.initMeshcatDisplay - Remove
pinocchio.deprecated.setGeometryMeshScalesbypinocchio
2.7.1 - 2024-04-26
Changed
- Modify algorithm that appends a model to another (#2218)
- Set NOMINMAX as a public definitions on Windows (#2139)
- Improve documentation of
enum ReferenceFrame(#2190) - Improve documentation of
getJointJacobian(#2193).
Fixed
- CMake now uses Relative Path instead of Absolute (#2202)
- Order of frames in
ReducedModelis now the same as in the full model (#2160) - Remove a lot of warnings (#2139)
-
MeshcatVisualizerdoesn’t crash anymore when there is no collision model defined (#2147) - Fix MSVC build (#2155)
- Fix stub generation (#2166)
- Clean up empty documentation pages and sections (#2167)
- Fix SO(3) title and cross-section reference in the documentation (#2210)
Added
- Add
examples/floating-base-velocity-viewer.pyto visualize floating base velocity (#2143) - Add remark to the documentation of
getFrame(Classical)Accelerationfunctions (#2169) - Allow use of installed jrl-cmakemodules (#2216)
2.7.0 - 2024-01-23
Added
- Add
GeometryObject::meshMaterialattribute (#2084) - Add Parser for mujoco mjcf models
pinocchio::mjcf::buildModelandpinocchio::mjcf::buildGeom
Fixed
- Use bp::ssize_t for recent version of Windows compilers (#2102)
- Fix missing include for Boost >= 1.83 (#2103)
- Remove f-strings to fix install with python 2 (#2110)
- CMake: stop exporting CppAd/cppadcodegen & fetch submodule if not available (#2112)
- Fix malloc issue in CRBA algo (#2126)
- Fix build cppad and cppadcg with Boost < 1.77 (#2132)
2.6.21 - 2023-11-27
Added
- Add inverse dynamics (
rnea) Python and C++ example (#2083) - Add visualization of Frames in MeshCat viewer (#2098)
Fixed
- Re-initialize
Ycrb[0]incrbaMinimal(#2040) - Fix custom scalar use in
logfunction (#2047) - Raise exception on wrong input size in
XYZQUATToSE3Python binding function (#2073) - Remove memory leak in
buildGeomFromUrdfandbuildGeomFromUrdfStringPython binding functions (#2082https://github.com/stack-of-tasks/pinocchio/pull/2082) - Fix Panda3D viewer examples (#2087)
- Fix centroidal dynamics derivatives with respect to time (#2094))
Changed
- Rename freeflyer_joint to root_joint in
humanoidsample model (#2043) - CMake minimal version is now 3.10 (#2055)
- Split headers and sources in different directories to have a more standard C++ project (#2070)
Removed
- Remove support to
hpp-fcl< v2.0.0 (#2086)
2.6.20 - 2023-08-09
What’s Changed
- Fix support of recent versions of Boost for CppAD and CppADCodeGen by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2000
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 1e0c5aff1147d50d58bf4185a55ff564c9b6e027 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2007
- Enabled copy and deepcopy by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1882
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 9f963f67ebb889792175776c5ee00134d7bb569b by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2013
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2029
2.6.19 - 2023-06-19
What’s Changed
- Add Motion::toHomogeneousMatrix by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1946
- The insatiable English teacher PR 🧙 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1957
- require C++14 for Boost >= 1.81 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1949
- CMake: an example require python 3 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1966
- Fix IK example in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1963
- Issue templates by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1971
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1976
- Enhance CMake packaging for Windows by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1984
- Documentation by @drewhamiltonasdf in https://github.com/stack-of-tasks/pinocchio/pull/1986
- Add support for ccache on Conda build by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1987
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1988
- Enhance compatibility with new Python versions by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1996
New Contributors
- @drewhamiltonasdf made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1986
2.6.18 - 2023-04-29
What’s Changed
- Support force in pybind11 by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1868
- Fix some Python bindings signatures and add stub generation. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1869
- Fix IK example by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1875
- Remove empty examples by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1878
- build(deps): bump ros-industrial/industrial_ci from 6a8f546cbd31fbd5c9f77e3409265c8b39abc3d6 to 4b78602d67127a63dce62926769d9ec4e2ce72e4 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1890
- add static-contact-dynamics example by @PepMS in https://github.com/stack-of-tasks/pinocchio/pull/1891
- Update documentation of
JointModel.shortnamein python bindings by @Danfoa in https://github.com/stack-of-tasks/pinocchio/pull/1892 - update doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1898
- Document that joints need to be added in depth-first order by @traversaro in https://github.com/stack-of-tasks/pinocchio/pull/1899
- fix INSTALL_RPATH on ROS & OSX by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1908
- Python example: update joint placements after loading a URDF by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1911
- Remove more empty sections from the docs by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1912
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1914
- update doc for fixed joint by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1920
- doc: more information about frames on cheatsheet by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1930
- Define operational frames in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1929
- Remove support of np.matrix by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1941
- Fix other np.matrix issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1942
New Contributors
- @PepMS made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1891
- @Danfoa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1892
2.6.17 - 2023-02-15
What’s Changed
- Fix Jlog6 documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1857
- Add documentation to Jlog3 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1858
- [python/visualize] Extend visualizer features and implement them for MeshcatVisualizer by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1845
- Second-order RNEA derivatives by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1860
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1863
- Fix support of AVX2. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1865
2.6.16 - 2023-02-02
What’s Changed
- Enforce testing of Python bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1853
- Fix issue with Python 3.6 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1855
2.6.15 - 2023-01-31
What’s Changed
- More documentation for getJointJacobian by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1836
- Error when integrating SE3 with the same vector given as input and output by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1775
- Documentation for Jlog6 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1842
- remove useless header by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1846
- Fix issue with recent change on master branch for ROS-CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1847
- Fix issue with old version of Boost and eigenpy >= 2.9.0 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1851
2.6.14 - 2023-01-13
What’s Changed
- Fix registration of ptr to Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1832
2.6.13 - 2023-01-12
What’s Changed
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1790
- Skip collision pairs between geom on same joint in appendGeometryModel by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1791
- Fix issue with Boost 1.78 on OSX systems by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1792
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1793
- Add helper functions for computing supported inertia and force by frames by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1796
- Follow-up : Supported inertia by frame by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1797
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1799
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1801
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1802
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1809
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1811
- Fix Python issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1821
- Allow to use std::shared_ptr by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1822
2.6.12 - 2022-11-06
What’s Changed
- Elevate check for ambiguous input argument to an exception by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1781
- Fix packaging issues + sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1782
- Fix issue with clang by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1784
2.6.11 - 2022-10-25
What’s Changed
- URDF: fix loading relative mesh path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1748
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1750
- Add @note to difference documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1753
- Configuration limits for joints and model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1756
- Address remaining warnings + speed-up build for BUILD_TESTING=OFF by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1764
- Add status of ROS builds to README by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1770
- pinocchio/visualize: Add support for cone shape in meshcat dispaly by @whtqh in https://github.com/stack-of-tasks/pinocchio/pull/1769
- Updates README by @nikoandpiko in https://github.com/stack-of-tasks/pinocchio/pull/1776
- Enhance cmake packaging by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1777
New Contributors
- @stephane-caron made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1753
- @whtqh made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1769
- @nikoandpiko made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1776
2.6.10 - 2022-09-14
What’s Changed
- fix syntax for python 2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1734
- Expose
removeGeometryObjectin python binding by @Jiayuan-Gu in https://github.com/stack-of-tasks/pinocchio/pull/1736 - Fix relocalable by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1738
- Fix relative path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1742
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1744
New Contributors
- @Jiayuan-Gu made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1736
2.6.9 - 2022-08-12
What’s Changed
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1669
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1670
- Sync example-robot-data by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1671
- update to pybind11 v2.9.2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1674
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1678
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1677
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1679
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1692
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1691
- Fix bug in appendModel by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1693
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1695
- Fix geometry color default value by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1699
- Add python example appending Urdf and another model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1698
- SO3 diff impl use quaternion instead of rotation matrix by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1702
- add cheat sheet to doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1705
- cmake/utils: no need for python here by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1709
- Add header only target by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1712
- cmake: relocatable package for recent CMake versions by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1716
- cmake: modernize header-only lib by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1718
- ROS2/Colcon integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1719
- CMake: update to eigenpy 2.7.10 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1720
- Fix weird test failure on Conda by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1723
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1727
- ROS2 release support by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1681
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1732
New Contributors
- @fabinsch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1698
2.6.8 - 2022-06-06
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1648
- Fix integrate method for SO2 by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1652
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1653
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1658
- Extend current Coriolis computations to account for Cristoffel symbol of first kind by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1665
- Fix method play() of rviz_visualizer by @danielcostanzi18 in https://github.com/stack-of-tasks/pinocchio/pull/1667
- chore: Included githubactions in the dependabot config by @nathannaveen in https://github.com/stack-of-tasks/pinocchio/pull/1659
- Enable ubuntu 22.04 on CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1668
New Contributors
- @pre-commit-ci made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1648
- @Toefinder made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1652
- @danielcostanzi18 made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1667
- @nathannaveen made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1659
2.6.7 - 2022-05-03
What’s Changed
- add dummy .pre-commit-config.yaml by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1629
- Avoid triggering multi-line comment in Latex formula by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1630
- Make Pinocchio v2 compatible with HPP-FCL v2 by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1631
- Add example of collision with a point cloud by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1636
- follow up on hpp-fcl v2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1637
- Fix pickling for Boost >= 1.7.4 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1640
2.6.6 - 2022-03-22
What’s Changed
- Support HPP-FCL for ROS binaries & introduce ROS2 ament integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1622
2.6.5 - 2022-02-14
What’s Changed
- Fix warning issue in Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1546
- RVizVisualizer update by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1549
- Correct link to examples. Removed python subdirectory in the link as the directory does not exist anymore by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1561
- Add CONTRIBUTING.md file for newcomers by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1563
- Add list of projects based on Pinocchio by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1566
- Fix constrained dynamics formula by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1567
- Append “/share” to AMENT_PREFIX_PATH by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1568
- Expose dIntegrateTransport by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1572
- [timings] Reduce allocations in finite-difference baselines by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1583
- [computeAllTerms] Add missing noalias to avoid temporary allocation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1582
- Missing
noaliasby @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1585 - [multibody/model] add joint arg validation by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1586
- [multibody/geometry] Add method to remove an object. by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1588
- Fix bug in ABAChecker by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1599
- Update README.md by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1604
- allow
robot_wrapperto share data with itsvizby @vnghia in https://github.com/stack-of-tasks/pinocchio/pull/1606
New Contributors
- @duburcqa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1585
- @vnghia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1606
2.6.4 - 2021-11-02
What’s Changed
- Change ‘typedef’ to ‘using’, add curly braces by @the-raspberry-pi-guy in https://github.com/stack-of-tasks/pinocchio/pull/1476
- [CMake] set INSTALL_RPATH for python on linux by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1482
- [visualize] captureImage() method by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1480
- ci: update ROS CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1483
- Fix issue with Pool when FCL is missing by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1485
- fix module name by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1487
- Add RVizVisualizer by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1488
- fix reshape issues by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1489
- Remove useless reference to L-GPL + remove of useless files by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1500
- Update old function, remove mobile robot wrapper by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1490
- Allows the display of {COLLISION,VISUAL} in MeshCat by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1502
- Delete submodule travis by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1509
- Add citation by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1511
- badges: add PyPI by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1510
- Add support of Convex within MeshCat + improve GeometryObject bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1530
- [python] Fix BaseVisualizer constructor. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1533
- [python] Add pybind11 header. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1519
- make copy of supports during model cast by @rubengrandia in https://github.com/stack-of-tasks/pinocchio/pull/1536
- [python] Simplify buildGeomFromUrdf and allow to build from string. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1538
- Sync submodule by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1542
- Turn off automatic documentation generation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1541
New Contributors
- @the-raspberry-pi-guy made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1476
- @ManifoldFR made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1480
- @EtienneAr made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1488
- @kozakromch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1489
- @rubengrandia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1536
2.6.3 - 2021-07-27
This new release fixes bugs in MeshCat rendering, loading of ROS path and in the Centroidal dynamics derivatives
2.6.2 - 2021-07-05
This new release provides fixes include orders in the unit tests due to recent versions of Boost. It also provides more content to the Readme. This new release prefigures the new Pinocchio 3.x
2.6.1 - 2021-06-08
Enhancement:
- extended support of serialization of FCL primitives
- extended support of Boost.Variant in Python
Fixes:
- fix bug when loading URDF on Windows
- fix handling of Frame inertia
2.6.0 - 2021-04-11
This new release provides:
- improvement for handling collision/distance requests
- support of parallel computations for ABA, RNEA and collisions algorithms (more to come soon)
- additional features for the RobotWrapper in Python
- support of Capsule for Meshcat
- happened Inertia information to Frames
- fixes for doc issues
- improve numerical robustness when two inertias are Zero
2.5.6 - 2021-01-23
This new release comes with a more consistent ABA algorithm (data.a_gf used instead of classic data.a) and more outcomes for computeAllTerms. In addition, it provides some extended supports to PyPy.
2.5.5 - 2021-01-07
This maintenance release enhances the whole CMake packaging of the project and provides additional features for the Python bindings.
2.5.4 - 2020-11-26
This new release enhances the compatibility of Pinocchio with former distributions, provides better support to Euler angles and fixes some bugs.
2.5.3 - 2020-11-13
This new release fixes some issues with the Python bindings, add new examples and extend the whole tests.
2.5.2 - 2020-11-02
This new release enhances the compatibility with Windows, provides new tools eitheir to work on joint configurations and also to compute the kinematic regressors.
2.5.1 - 2020-10-12
This new release provides:
- improvements on the whole project coverage
- better support of Windows v142
- support of joint friction and damping (only at the interface level)
- new algorithm to retrieve the Coriolis matrix from RNEA/ABA derivatives
2.5.0 - 2020-08-31
In this new release, we have:
- a full memory shared in the Python bindings, i.e. that all the Eigen object can now be changed in Python.
- better handling of multiprecision arithmetic
- improved CMake packaging
- fix for Autodiff
2.4.7 - 2020-07-20
This new release provides:
- an extended API for dealing with Lie groups and the related computations (integration, difference, derivatives, etc.)
- the Lie groups have now their Python bindings for easy code prototyping
- the kinematics derivatives of the Frames have been introduced as well as the extension of current Joints derivatives
- the packaging of the project has been improved too.
2.4.6 - 2020-06-15
This new release of Pinocchio removes the use of pkg-config to check dependencies and provides a full compatibility and support for Windows systems.
2.4.5 - 2020-05-23
This new release extends the current frames algorithms to also consider the LOCAL_WORLD_ALIGNED reference frame. It also exposes the values of the enum_ for simplified usage.
2.4.4 - 2020-05-13
This new release provides:
- new helpers function to retrieve frame velocities and accelerations
- for each collision pair, it is now possible to provide specific collision checking settings
- support to display convex hulls in viewers
It also fixes:
- the support of Panda3d
and enhances the global CMake packaging of the project.
2.4.3 - 2020-04-24
This new release provides a new Viewer, named Panda3d, for easy code visualization in Python. It also provides additional fixes to the Code Generation support.
2.4.2 - 2020-04-21
This new release of Pinocchio provides new features for dealing with Lie groups:
- improved operations over the differential operations of the integrate function
- new functions for transporting some matrix between the two endpoints of the integrate function
- the RPY functions are now robust over singularities
- the support of autodiff frameworks has been improved to also cope with Lie groups features
This release also provides:
- a packaging fixe with respect to the URDFDOM dependency
- the Python bindings should now be without memory leak
2.4.1 - 2020-04-15
This new release fixes a bug introduced in Pinocchio 2.4.0 concerning the method ModelTpl::addFrame. This release also provides better support for the checking of the CppAD and CppADCodeGen versions.
2.4.0 - 2020-04-09
This new release of Pinocchio makes several improvements:
- improve compatibility with hpp-fcl
- improve compatibility with CppAD and notably the Lie algebra features
- a better CMake >= 3.0 export of the project
- new examples for Code generation
- improved Python bindings
- improved support for Boost.Multiprecision
- reduce the memory usage when compilation unit tests
and we have started to move some dependencies like urdfdom to the pinocchio.so library to avoid additional compilations issues and to useless compilations burden.
2.3.1 - 2020-02-20
This new release provides:
- some fixes with respect to minor bugs introduced in Pinocchio 2.3.0
- an enhance detection of Python
- improves the compilation memory overhead
2.3.0 - 2020-02-18
This new release provides:
- full compatibility with CMake export
- full compatibility with Numpy.Array
- examples for Code generation
- better support of C++11
- minor bug fixes
- improves coverage
- uniformizes function signature
- improves interoperability between Numpy and Pinocchio
- add many examples
- full integration of Python bindings of hpp-fcl
- supports the pickling and the serialization of Data
2.2.3 - 2019-12-30
This new release provides:
- pickling and serialization of Data structures
- provide new algorithms to create reduce models
It also improves the compatibility with the Transform used in HPP-FCL. It also fixes various bugs. It also comes with new and detailed examples.
2.2.2 - 2019-12-11
This new release:
- improves the compatibility with HPP-FCL bindings
- improves the documentation of the project with more examples
- fixes some bugs related to Eigen
- add new algorithms to compute the centroidal matrix and its time derivatives
2.2.1 - 2019-11-25
This new release fixes the ROS package version number and updates the robot models.
2.2.0 - 2019-11-25
This new release of Pinocchio introduces:
- analytical formula for Hessian of the kinematics
- derivatives of the difference operation
- new derivatives for static torque quantity
- new models for tests and examples.
It adds some signature non-exposed in Python. It also deletes outdated function signatures that have been deprecated in 2.0.x versions. It also improves the packaging with respect to ROS or other robotics frameworks.
2.1.11 - 2019-10-27
This release fixes missing update of the ROS package.xml file with the new version.
2.1.10 - 2019-10-25
This new release allows throwing when some input arguments are not fulfilled (useful feature in Python). It also provides new support for Hessian of the kinematics. Finally, the project is now packaged for ROS integration.
2.1.9 - 2019-10-09
This is a maintenance release, with some fixes concerning the contact dynamics, better support of LOCAL_WORLD_ALIGNED option and fixes with respect to some recent versions of CppADCodeGen.
2.1.8 - 2019-09-30
This is a maintenance release providing several fixes:
- remove memory allocation in ABA derivatives with contact forces
- better handling of boost::Variant
- better support of Majax
It also provides new features in the documentation of mathematical formula.
2.1.7 - 2019-09-10
This new release improves:
- the support of AutoDiff frameworks
- the efficiency of some core algorithms
fixes:
- the support of Majax
- the compatibility with Python 2/3
2.1.6 - 2019-08-05
This new release improves the packaging of the project and provides new algorithms to compute the Jacobians of the center of mass of each subtree.
2.1.5 - 2019-07-16
This new release provides support for JointMimic and JointRevoluteUnboundedUnaligned. It also comes with the full support of CasADi.
Thanks to @mkatliar for helping us to provide this support.
2.1.4 - 2019-06-22
This new release provides some fixes with respect to Python bindings, C++17 as well as new important features:
- dynamic regressor for identification
- add support of multiple viewers
- improve analytical derivatives
2.1.3 - 2019-04-30
This new release fixes some issues with Python 3 and C++17 standard. It also provides additional documentation, enlarges the current Python bindings and uniformizes naming convention in Python.
2.1.2 - 2019-04-05
This new release aims at fixing compilations issues when COLLISION module is activated. It also provides some fixes concerning the loading of meshes.
A new feature provided by this release concerns the possibility of appending two models together.
2.1.1 - 2019-03-27
This new release fixes compatibility bugs with previous release 2.1.0. It also provides a serialization interface for Spatial classes and the Model class.
2.1.0 - 2019-02-27
This new release makes some major improvements:
- it is now possible to use MeshCat, another viewer working in the browser directly in Python
- the Python bindings are now hardly tested and uniformized with respect to the C++ API
- this new release is compatible with recent releases of
hpp-fcl - the SRDF parsing has been improved. Its now possible to load several reference configuration vectors
We also fixed bugs related to recent versions of Boost mostly.
2.0.0 - 2019-01-11
Welcome Pinocchio 2.0.0.
This release makes official the last important and new features for efficiently computing the dynamics of the rigid body systems:
- Analytical derivatives
- Automatic differentiation
- Full scalar type overloading
- Code generation among others
1.3.3 - 2018-10-29
This is for real the last release before Pinocchio 2.0.0 and more.
This release fixes the packaging when hpp-fcl is missing. Thanks to @aelkhour for raising this issue.
1.3.2 - 2018-10-26
This release is the last one before Pinocchio 2.0.0.
It mostly:
- fixes issues introduced by new API of frame functionalities;
- introduces new sample models for manipulator and humanoid systems;
- fixes bugs due to boost 1.58.0;
- improve the readme with credits section.
1.3.1 - 2018-09-25
This new release corrects some bugs or bad deprecations concerning Pinocchio 1.3.0.
1.3.0 - 2018-08-28
This new release introduces analytical derivatives in the corpus of Pinocchio. This feature is still under development but can already be used both in C++ and Python.
This new release also fixes a bunch of bugs related to Eigen and Boost.
1.2.9 - 2018-06-01
This is mostly a maintenance release:
- Fix bug in. lower bounds in Model class
- Update documentation structure (additional work is needed)
- Improve the compatibility with Python 3.x
1.2.8 - 2018-05-18
This is mostly a maintenance release:
- Fix some bugs in JointModel{Translation,Spherical} for ABA algorithm
- Fix a duplication issue in RobotWrapper
- Improve compatibility with recent version of Boost >= 1.67.0
- Romeo is now loaded from the official romeo_description repository
1.2.7 - 2018-04-03
This is mostly a maintenance release:
- Fixes and computation improvements for Lie group operations.
- Adding pickle for spatial classes.
- Allow loading of URDF tree directly from an XML stream.
1.2.6 - 2018-01-15
This is mostly a maintenance release with various fixes to comply with Boost variadic macro on recent OS. It also adds new convention with a LOCAL and a WORLD frame to express Jacobian quantities.
1.2.5 - 2017-10-10
This a maintenance Release. We added some algo to compute the time variation of the Jacobians together with the variation with respect to time of the centroidal momemtum matrix. HPP-FCL works now with Eigen for linear algebra.
1.2.4 - 2017-06-09
This is mostly a maintenance release, with some fix with respect new urdfdom versions, it handles Eigen support with hpp-fcl.
1.2.3 - 2017-02-14
This release fixes some issues with respect to 1.2.1.
API modifications
Interpolate, Differentiate, Integrate are now algorithmic struct which can be efficiently overloaded.
Bindings
Add FCL object bindings
1.2.1 - 2016-10-17
Summary
This release is a minor patch of the previous release 1.2.0.
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New
- The Python bindings are aligned and free of unnecessary allocations
- Add documentation option which allows to not install the documentation
- Introduces container::aligned_vector to automatically create an std::vector with specific aligned allocator
API modifications
- Remove JointDense.
- Remove JointGeneric
Fixes
- Solves the parsing of geometries in URDF module
- Fixes alignment issues on 32 bits architecture
1.2.0 - 2016-09-29
Summary
The main modifications concern the update of the code to comply with the Humanoid Path Planner (HPP).
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Add Joint{Model,Data} classes based on Joint{Model,Data}Base and Joint{Model,Data}Variant. Those classes call directly the visitors and make Variant accessible throw methods
- Add partial Joint{Model,Data}Composite. They allow a stack of joints without adding any Inertia.
- Increase Frame class. Frames can be of several types (BODY, JOINT, SENSOR, etc) and reflect the robot tree as it appears in the URDF conventions. Frames have two attributes: parent which the direct Joint parent in the Joint tree, previousFrame which correspond to the parent Frame in the tree of Frames).
- Adding Python parser which is able to read models written in Python.
- Add algo checker to check the validity of a model.
- Improve documentation.
API modifications
- Model has some methods deprecated. The default name has been removed.
- The Geometry classes have been updated and several methods have been set to deprecated. They now use Frames as parent instead of Joint directly: a Geometry is now supported by a BODY.
- Add active collision pair flags in GeomData which define the active collision pairs.
- Unify naming conventions (nframes, njoints, etc).
Fixes
- The UDRF parser can now deal with more complex topologies. It properly handles the stack of geometries for each BODY.
- Improve packaging mainly around the Python part.
1.1.2 - 2016-05-31
Summary
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Added operational frames (that are a Plucker coordinate frame attached to a parent joint inside a kinematic tree). Position and Jacobian of such frames can be computed
- Geometry primitives can now be handled (and added to the Pinocchio GeometryModel) when encountered in an urdf file
- Implemented simple srdf parsing for GeometryData : parse the desactivated collision pairs
- Added Articulated Body Algorithm (ABA), and CCRBA
- When parsing a urdf file, now look in the environment variable ROS_PACKAGE_PATH for directories where to search for meshes. Users can provide hint directories to search in as a priority. Updated python RobotWrapper consequently
- Added forward dynamics with contact algorithm
- Added algorithms working with vectors of configuration or velocity(either on a JointModel or on a Model, iterating through all the kinematic tree)
- One can integrate a configuration at a constant velocity during a unit time
- One can differentiate two configurations (i.e compute the velocity that must be integrated during a unit time to go from first configuration to the other )
- One can interpolate between two configurations
- One cancompute the distance between two configurations ( such as dist = norm ( difference) )
- One can shoot a configuration uniformly sampled between specified limits
- Added Impulse Dynamic Algorithm
- Completed the list of method to access or call Joint’s data or method when joint are stored in a variant.
- Added JointAccessor that is a general joint encapsulating a JointVariant ( abstracting the use of visitors for the user).
API modifications
- Moved limits from joint models to Model as vectors of size nq for position limits and size nv for velocity and effort limits
- The Geometry objects stored in GeometryModel are now splitted in two types : visual and collision
Minor
- Improved documentation of Data, Model, Spatial Classes
- Improved efficiency when executing algorithms
- One can now create Inertia for simple shapes such as cylinders, boxes, ellipsoid
- Rework some unittests to increase to coverage of whole package ( C++ and Python )
Bugs Fixed
- Fixed operator Inertia x constraint in JointSphericalZYX
- Fixed the Dense conversion of joints (models and datas)
- Fixed bugs in JointRevoluteUnaligned and JointPrismaticUnaligned to access the access when visiting a variant containing such joints with boost::fusion
1.1.0 - 2016-02-04
Summary
New Features
- Spatial classes now follow the CRTP Design Pattern, for performance reasons.
- JointModels are now exposed in Python. This feature enables one to load a URDF model with a precise root joint and to create his/her own model.
- Python models can now be created by hand ( ex: buildEmptyModel() + calls to addBody() )
- Added utility tools to check an urdf model ( same as check_urdf but dislpay the Pinocchio model created from urdf parsing)
- Add unaligned prismatic joint
- Add geometry through Flexible Collision Library (hpp-fcl)
- Add dedicated structs to handle geometry. GeometryModel (list of geometry objects and its relation wrt kinematic model) and GeometryData
- When parsing urdf, meshes can be read from collada files and handled in Pinocchio
- Created parser that handles geometry and exposed it in python
- Add algorithms to update the geometry kinematics, to compute the distances for pairs of collision or if they are colliding or not.
- Added algorithms to compute the kinetic energy, the potential energy and exposed it in python
- The complete documentation is in progress
API modifications
- Change name of kinematics algorithms: now forwardKinematics instead of previous geometry, kinematics and dynamics.
Minor
- SimpleHumanoid is now built with joint limits
- Handle floating joints in urdf parsing
- Slight separation between joints and body in Model to avoid confusion
- Internally, Motion and Force classes now use a 6D-vector instead of two 3D-vectors for linear and angular part
Bugs Fixed
- Fixed a bug when trying to merge a link with its parent in case of fixed joint. Now merge only if it has an inertial tag.
- All the algorithms are now set to inline
- Fix compilation errors
Installation
The source of the release are available in the file pinocchio-1.1.0.tar.gz just below along with a binary version for 64-bits Debian architecture of Pinocchio **pinocchio_1.1.0amd64.deb** and its dependencies. For information, those packages will be installed in _/opt/openrobots directory.
1.0.2 - 2015-09-14
Summary
New Features
- The limits in position, velocity and torque for joints Revolute and Prismatic are now parsed from urdf model and accessible
- Implementation of exp and log functions on SE3 in C++ with its python binding thanks to @aelkhour
- Data now contains information relative to the center of mass position, velocity and acceleration
- Add Lua parser - compatible with RBDL
- Add translational joint
- Add planar joint
Minor
- Reduction of compilation warnings.
Bugs Fixed
- Fixed bug in operator Y*S in JointRevoluteUnaligned
1.0.0 - 2015-04-03
The following algorithms are implemented. • Recursive Newton-Euler algorithm (RNEA, i.e inverse dynamics) • Composite Rigid Body algorithm (CRBA, i.e generalized inertia matrix) • Sparse Cholesky decomposition of the inertia matrix (for constrained forward-dynamics resolution) • Placement Jacobians (i.e application from configuration velocities to end-effector spatial velocities), along with computation of body placements, velocities and accelerations. • Center of mass and its Jacobian
The model can either be parsed from a URDF format or be created by appendending bodies. The following joint models are implemented. • Revolute X, Y, Z (optimized) and unaligned with Cartesian directions • Prismatic X, Y, Z • Spherical (with and withoug singularities) • FreeFlyer (i.e. no constraint, for mobile robots like humanoids – using quaternion representation for the rotation) • Fixed (concatenation of two consecutive bodies)
Wiki Tutorials
Dependant Packages
| Name | Deps |
|---|---|
| libfranka | |
| kinematics_interface_pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged pinocchio at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.3.1 |
| License | BSD-2 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stack-of-tasks/pinocchio.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-01-13 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Justin Carpentier
- Wolfgang Merkt
Authors
![]()
![]()
![]()
![]()
Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone’s algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
Pinocchio was first tailored for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.). It is built upon Eigen for linear algebra and FCL for collision detection. Pinocchio comes with a Python interface for fast code prototyping, directly accessible through Conda.
Pinocchio is now at the heart of various robotics software as Crocoddyl, an open-source and efficient Differential Dynamic Programming solver for robotics, the Stack-of-Tasks, an open-source and versatile hierarchical controller framework or the Humanoid Path Planner, open-source software for Motion and Manipulation Planning.
If you want to learn more about Pinocchio internal behaviors and main features, we invite you to read the related paper and the online documentation.
If you want to dive into Pinocchio directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
Table of contents
- Table of contents
- Introducing Pinocchio 3
- Pinocchio main features
- Documentation
- Examples
- Tutorials
- Pinocchio continuous integrations
- Performances
- Ongoing developments
- Installation
- Visualization
- Citing Pinocchio
- Questions and Issues
- Credits
- Open-source projects relying on Pinocchio
- Acknowledgments
Introducing Pinocchio 3
Pinocchio3 is the latest major release of Pinocchio. It comes with multiple new features, such as:
- Sparse constrained dynamics and its analytical derivatives
- Full support of closed-loop mechanisms
- State-of-the-art frictional contact solvers
- Low-complexity constrained articulated body algorithms
- Full support of multiple-precision floating-point (MPFR) in Python and C++
- Full CasADi support in Python and C++
- Increased support of CppAD and CppADCodeGen
- New SDF and MJCF parsers
- and much more.
Pinocchio main features
Pinocchio is fast:
- C++ template library,
- cache friendly,
- automatic code generation support is available via CppADCodeGen.
Pinocchio is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- support multiple precision arithmetic via Boost.Multiprecision or any similar framework,
- computations of kinematic and dynamic regressors for system identification and more,
- and much more with the support of modern and open-source Automatic Differentiation frameworks like CppAD or CasADi.
Pinocchio is flexible:
- header only,
- C++ 98/03/11/14/17/20 compliant.
Pinocchio is extensible. Pinocchio is multi-thread friendly. Pinocchio is reliable and extensively tested (unit-tests, simulations, and real-world robotics applications). Pinocchio is supported and tested on Windows, Mac OS X, Unix, and Linux (see build status here).
Documentation
The online Pinocchio documentation of the last release is available here. A cheat sheet pdf with the main functions and algorithms can be found here.
Examples
In the examples directory, we provide some basic examples of using Pinocchio in Python. Additional examples introducing Pinocchio are also available in the documentation.
Tutorials
Pinocchio comes with a large bunch of tutorials aiming at introducing the basic tools for robot control. Tutorial and training documents are listed here. You can also consider the interactive Jupyter notebook set of tutorials developed by Nicolas Mansard and Yann de Mont-Marin.
Pinocchio continuous integrations
Pinocchio is constantly tested for several platforms and distributions, as reported below:
| CI on ROS | |
| CI on Linux via APT | |
| CI on OSX via Conda | |
| CI on Windows via Conda | |
| CI on Linux via Robotpkg | |
Performances
Pinocchio exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, Pinocchio can unroll most of the computations directly at compile time, allowing to achieve impressive performances for a large range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical paper. In addition, the introspection may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
Ongoing developments
If you want to follow the current developments, you can directly refer to the devel branch. The master branch only contains the latest release. Any new Pull Request should then be submitted on the devel branch.
Installation
Pinocchio can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the installation procedure.
Conda
You simply need this simple line:
conda install pinocchio -c conda-forge
ROS
Pinocchio is also deployed on ROS. You may follow its deployment status below.
If you’re interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA. Here, you can install Pinocchio using:
sudo apt install ros-$ROS_DISTRO-pinocchio
This installs Pinocchio with HPP-FCL support and with Python bindings. You can then use Pinocchio in your ROS packages by:
- Depending on Pinocchio in your
package.xmlconfig (<depend>pinocchio</depend>) - Including Pinocchio via CMake (
find_package(pinocchio REQUIRED)) and linking against Pinocchio (target_link_libraries(my_library pinocchio::pinocchio))
We include support and hooks to discover the package for both ROS 1 and ROS 2. Examples can be found at the following repositories:
Please note that we always advise including the pinocchio/fwd.hpp header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 1 | ROS 2 | |||
|---|---|---|---|---|
| Melodic | Foxy | |||
| Noetic | Galactic | |||
| Humble | ||||
| Rolling |
Visualization
Pinocchio provides support for many open-source and free visualizers:
- Gepetto Viewer: a C++ viewer based on OpenSceneGraph with Python bindings and Blender export. See here for a C++ example on mixing Pinocchio and Gepetto Viewer.
- Meshcat: supporting visualization in Python and which can be embedded inside any browser.
- Panda3d: supporting visualization in Python and which can be embedded inside any browser.
- RViz: supporting visualization in Python and which can interact with other ROS packages.
Many external viewers can also be integrated. For more information, see the example here.
Citing Pinocchio
To cite Pinocchio in your academic research, please consider citing the software paper and use the following BibTeX entry:
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
And the following one for the link to the GitHub codebase:
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
Citing specific algorithmic contributions
Pinocchio goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning and control. Pinocchio provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc. If you use these algorithms, please consider citing them in your research articles.
- Le Lidec, Q., Montaut, L. & Carpentier, J. (2024, July). From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach. In RSS 2024-Robotics: Science and Systems.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). GJK++: Leveraging Acceleration Methods for Faster Collision Detection. IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). Constrained Articulated Body Dynamics Algorithms. Under review.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). Differentiable collision detection: a randomized smoothing approach. In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2023). Contact models in robotics: a comparative analysis. Under review.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). Collision Detection Accelerated: An Optimization Perspective. In Robotics: Science and Systems (RSS 2O22).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). Proximal and sparse resolution of constrained dynamic equations. In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018).
Questions and Issues
Do you have a question or an issue? You may either directly open a new question or a new issue or, directly contact us via the mailing list pinocchio@inria.fr.
Credits
The following people have been involved in the development of Pinocchio and are warmly thanked for their contributions:
- Justin Carpentier (Inria): main developer and manager of the project
- Nicolas Mansard (LAAS-CNRS): initial project instructor
- Guilhem Saurel (LAAS-CNRS): continuous integration and deployment
- Joseph Mirabel (Eureka Robotics): Lie groups and hpp-fcl implementation
- Antonio El Khoury (Wandercraft): bug fixes
- Gabriele Buondono (LAAS-CNRS): features extension, bug fixes, and Python bindings
- Florian Valenza (Astek): core developments and hpp-fcl support
- Wolfgang Merkt (University of Oxford): ROS integration and support
- Rohan Budhiraja (LAAS-CNRS): features extension
- Loïc Estève (Inria): Conda integration and support
- Igor Kalevatykh (Inria): Panda3d viewer support
- Matthieu Vigne (Wandercraft): MeshCat viewer support
- Robin Strudel (Inria): features extension
- François Keith (CEA): Windows support
- Sarah El Kazdadi (Inria): multi-precision arithmetic support
- Nicolas Torres Alberto (Inria): features extension
- Etienne Arlaud (Inria): RViz viewer support
- Wilson Jallet (LAAS-CNRS/Inria): extension of Python bindings
- Fabian Schramm (Inria): core developper
- Shubham Singh (UT Austin): second-order inverse dynamics derivatives
- Stéphane Caron (Inria): core developper
- Joris Vaillant (Inria): core developer and manager of the project
- Sebastian Castro (The AI Institute): MeshCat viewer feature extension
- Lev Kozlov: Kinetic and potential energy regressors
- Megane Millan (Inria): Features extension and core developer
- Simeon Nedelchev: Pseudo inertia and Log-Cholesky parametrization
- Ajay Sathya (Inria): core developer
If you have participated in the development of Pinocchio, please add your name and contribution to this list.
Open-source projects relying on Pinocchio
- Crocoddyl: A software to realize model predictive control for complex robotics platforms.
- TSID: A software that implements a Task Space Inverse Dynamics QP.
- HPP: A SDK that implements motion planners for humanoids and other robots.
- Jiminy: A simulator based on Pinocchio.
- ocs2: A toolbox for Optimal Control for Switched Systems (OCS2)
- TriFingerSimulation: TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- Casadi_Kin_Dyn: IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- PyRoboPlan: An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- ProxSuite-NLP: A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- Aligator: A versatile and efficient framework for constrained trajectory optimization.
- Simple: The Simple Simulator: Simulation Made Simple.
- LoIK: Low-Complexity Inverse Kinematics.
Acknowledgments
The development of Pinocchio is actively supported by the Gepetto team @LAAS-CNRS and the Willow team @INRIA.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Add parsing meshes with vertices for MJCF format (#2537)
Fixed
- Fix mjcf Euler angle parsing: use xyz as a default value for eulerseq compiler option (#2526)
- Fix variable naming in Python (#2530)
- Fix aba explicit template instantiation (#2541)
- CMake: fix RPATH on macos (#2546)
- Fix aba explicit template instantiation (#2541)
- Fix mjcf parsing of keyframe qpos with newlines (#2535)
- Fix sites parsing for MJCF format (#2548)
3.3.1 - 2024-12-13
Added
- Add
pinocchio_python_parsertarget (#2475)
Fixed
- Fix mjcf parsing of armature and of the default tag in models (#2477)
- Fix undefined behavior when using the site attribute in mjcf (#2477)
- Fix the type of image paths when loading textures in the meshcat visualizer (#2478)
- Fix meshcat examples ([#2503])[https://github.com/stack-of-tasks/pinocchio/pull/2503]
- Fix
pinocchio-test-cpp-parallel-geometrywhen built with Coal (#2502) - Fix scaling support for meshcat (#2511)
Changed
- On GNU/Linux and macOS, hide all symbols by default (#2469)
- Build
pinocchio_defaultwith collision features (#2517)
3.3.0 - 2024-11-06
Added
- Default visualizer can be changed with
PINOCCHIO_VIEWERenvironment variable (#2419) - Add more Python and C++ examples related to inverse kinematics with 3d tasks (#2428)
- Add parsing of equality/connect tag for closed-loop chains for MJCF format (#2413)
- Add compatibility with NumPy 2
__array__API (#2436) - Added argument to let users decide of root joint name when parsing models (urdf, mjcf, sdf) (#2402)
- Allow use of
pathlib.Path | strfor paths in python bindings (#2431) - Add Pseudo inertia and Log-cholesky parametrization (#2296)
- Add Pixi support (#2459)
Fixed
- Fix linkage of Boost.Serialization on Windows (#2400)
- Fix mjcf parser appending of inertias at root joint (#2403)
- Fix unit tests with GCC 13.3 (#2406
- Fix class abstract error for Rviz viewer (#2425)
- Fix compilation issue with MSCV and C++17 (#2437)
- Fix
pinocchio-test-py-robot_wrapperwhen building with SDF and collision support (#2437) - Fix crash when calling
Inertia::FromDynamicParametersin Python with wrong vector size (#2296) - Fix
examples/cassie-simulation.pyandexamples/talos-simulation.py(#2443) - Fix build with CppAd 2024 (#2459)
- Fix
pinocchio-test-cpp-mjcfunittest with Boost 1.86 (#2459) - Fix
pinocchio-test-cpp-constraint-variantsuninitialized values (#2459) - Fix mixing library symbols between Pinocchio scalar bindings (#2459)
- Fix bug for get{Joint,Frame}JacobianTimeVariation (#2466)
Changed
- Modernize python code base with ruff (#2418)
- Does not create a root_joint frame from parsed models (urdf, mjcf and sdf) when no root joint is provided (#2402)
3.2.0 - 2024-08-27
Fixed
- Append pinocchio optional libraries into pkg-config file (#2322)
- Fixed support of DAE meshes with MeshCat (#2331)
- Fixed pointer casts in urdf parser (#2339)
- Remove CMake CMP0167 warnings (#2347)
- Fixed urdfdom in ROS packaging (#2341)
- Fixed overview-urdf cpp example (#2384)
- Fixed mjcf model without a base link parsing (#2386)
- Fixed talos-simulation.py, simulation-contact-dynamics.py and simulation-closed-kinematic-chains.py examples (#2392)
Added
- Add getMotionAxis method to helical, prismatic, revolute and ubounded revolute joint (#2315)
- Add initial compatiblity with coal (coal needs
-DCOAL_BACKWARD_COMPATIBILITY_WITH_HPP_FCL=ON) (#2323) - Add compatibility with jrl-cmakemodules workspace (#2333)
- Add
collision_colorparameter toMeshcatVisualizer.loadViewerModel(#2350) - Add
BuildFromMJCFfunction to RobotWrapper (#2363) - Add more CasADi examples (#2388)
Removed
- Remove deprecated headers related to joint constraints (#2382)
Changed
- Use eigenpy to expose
GeometryObject::meshMaterialvariant (#2315) - GepettoViewer is no more the default viewer for RobotWrapper (#2331)
- Modernize python code base with ruff (#2367)
- Restructure CppAD and CasADi examples (#2388)
- Enhance and fix CppAD benchmarks outputs (#2393)
3.1.0 - 2024-07-04
Fixed
- Fix
appendModelwhen joints after the base are in parallel (#2295) - Fix
appendModelbuild when called with template arguments different than the ones fromcontext(#2284) - Fix
TransformRevoleTpl::rotationandTransformHelicalTpl::rotationbuild (#2284) - Fix compilation issue for Boost 1.85 (#2255)
- Fix python bindings of
contactInverseDynamics(#2263) - Deactivate
BUILD_WITH_LIBPYTHONwhen building with PyPy (#2274) - Fix Python bindings cross building with
hpp-fcl(#2288) - Fix build issue on Windows when a deprecated header is included (#2292)
- Fix build issue on Windows when building in Debug mode (#2292)
- Fix visualization of meshes in meshcat (#2294)
- Fix Anymal simulation test (#2299)
- Fix contact derivatives and impulse dynamics tests (#2300)
- Fix CMake compatibility with old console_bridge version (#2312)
Added
- Python unittest for
contactInverseDynamicsfunction (#2263) - Added helper functions to return operation count of CasADi functions. (#2275)
- C++ and Python unittest for
dIntegrateTransportto check vector transport and its inverse (#2273) - Add kinetic and potential energy regressors (#2282)
Removed
- Remove header
list.hppinclude for bindings of model and rnea (#2263)
3.0.0 - 2024-05-27
Added
Automatic differentiation
- Full support of Casadi in the main library by @jcarpent and @ManifoldFR
- Full support of Casadi for Python bindings by @jcarpent
- Full support of Boost.Multiprecision in the main library by @jcarpent
- Full support of Boost.Multiprecision for Python bindings by @jcarpent
- Full support of CppAD and CppADCodeGen in the main library by @jcarpent
- Full support of CppAD and CppADCodeGen for Python bindings by @jcarpent and @proyan
Core features
- Full support of constrained dynamical systems by @jcarpent
- Full support of derivatives of constrained dynamical systems by @jcarpent and @proyan
- Extended algorithms for constrained dynamics: constrained ABA, PV solvers, etc. by @jcarpent and @AjSat
- Add frictional contact solvers (PGS, ADMM) by @jcarpent
- Add contact inverse dynamics by @quentinll
- Full support of broadphase algorithms in Pinocchio by @jcarpent
- New joint supports (Helicoidal, Universal) by @fabinsch and @MegMll
- Add new algorithms for supporting Delassus factorizations for sparse, dense and tree-based systems by @jcarpent
- Add full OpenMP support for many algorithms (ABA, RNEA, collision detection, etc.) by @jcarpent
- Full support of GeometryModel, GeometryObject serialization by @jcarpent
- Extended support of Meshcat by @jcarpent, @ManifoldFR and @jorisv
- Extended testing and support of Lie groups operations by @jcarpent and @ManifoldFR
- Full support of AVX512 and AVX2 vectorization for Python bindings by @jcarpent
- Full support of the robot armature in RNEA, CRBA and ABA
- Extended formulation of CRBA and ABA using WORLD convention for reduced computational burden in the derivative algorithms
Parsers
Extra Algorithms
- Added reachable workspace computation and vizualisation in collaboration with @askuric based on pycapacity by @MegMll and @jorisv
Packaging
- Full support of template instantiation by @fabinsch and @jorisv
- Enhance support for Windows-based systems by @jorisv
- Splitting of the Pinocchio into sub-library for isolation by @jorisv
Compatibility
- Add
PINOCCHIO_ENABLE_COMPATIBILITY_WITH_VERSION_2define to activate compatibility with Pinocchio 2 API
Changed
C++
- Change minimum required version of C++ to C++11. Check for compatibility here: https://en.cppreference.com/w/cpp/compiler_support/11
- Replace
pinocchio::BiasZeroTplbypinocchio::MotionZeroTpl - Replace
pinocchio::fusion::JointVisitorBasebypinocchio::fusion::JointUnaryVisitorBase - Replace
pinocchio::fusion::push_frontbypinocchio::fusion::append - Replace
pinocchio::regressor::computeStaticRegressorbypinocchio::computeStaticRegressor - Replace
pinocchio::jointJacobianbypinocchio::computeJointJacobian - Replace
pinocchio::frameJacobianbypinocchio::computeFrameJacobian - Replace
pinocchio::framesForwardKinematicsbypinocchio::updateFramePlacements - Replace
pinocchio::kineticEnergybypinocchio::computeKineticEnergy - Replace
pinocchio::potentialEnergybypinocchio::computePotentialEnergy - Replace
pinocchio::computeCentroidalDynamicsbypinocchio::computeCentroidalMomentumandpinocchio::computeCentroidalMomentumTimeVariation - Replace
pinocchio::centerOfMass(const ModelTpl&, DataTpl&, int, bool)bypinocchio::centerOfMass(const ModelTpl&, DataTpl&, KinematicLevel, bool) - Replace
pinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, int)bypinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, KinematicLevel) - Replace
pinocchio/algorithm/dynamics.hppbypinocchio/algorithm/constrained-dynamics.hpp - Change the order of arguments in some of
pinocchio::GeometryObject’s constructors - Deprecate
pinocchio/algorithm/parallel/geometry.hppmoved atpinocchio/collision/parallel/geometry.hpp - Deprecate
pinocchio/spatial/fcl-pinocchio-conversions.hppmoved atpinocchio/collision/fcl-pinocchio-conversions.hpp - Deprecate
pinocchio/parsers/sample-models.hppmoved atpinocchio/multibody/sample-models.hpp - Deprecate
pinocchio/math/cppad.hppmoved atpinocchio/autodiff/cppad.hpp - Deprecate
pinocchio/math/cppadcg.hppmoved atpinocchio/autodiff/cppadcg.hpp - Deprecate
pinocchio/math/casadi.hppmoved atpinocchio/autodiff/casadi.hpp - Deprecate
pinocchio::FrameTpl::parentreplaced bypinocchio::FrameTpl::parentJoint - Deprecate
pinocchio::FrameTpl::previousFramereplaced bypinocchio::FrameTpl::parentFrame - Deprecate
pinocchio/algorithm/contact-dynamics.hppalgorithms replaced bypinocchio/algorithm/constrained-dynamics.hpp
Python
- Replace
pinocchio.utils.skewbypinocchio.skew - Replace
pinocchio.utils.se3ToXYZQUATbypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.utils.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.robot_wrapper.RobotWrapper.frameClassicAccelerationbypinocchio.robot_wrapper.RobotWrapper.frameClassicalAcceleration - Replace
pinocchio.robot_wrapper.RobotWrapper.jointJacobianbypinocchio.robot_wrapper.RobotWrapper.computeJointJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.frameJacobianbypinocchio.robot_wrapper.RobotWrapper.computeFrameJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.initDisplaybypinocchio.robot_wrapper.RobotWrapper.initViewer - Replace
pinocchio.robot_wrapper.RobotWrapper.loadDisplayModelbypinocchio.robot_wrapper.RobotWrapper.loadViewerModel - Replace
pinocchio.deprecated.se3ToXYZQUATtuplebypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.deprecated.se3ToXYZQUATbypinocchio.SE3ToXYZQUAT - Replace
pinocchio.deprecated.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.deprecated.buildGeomFromUrdf(model, filename, [str])bypinocchio.buildGeomFromUrdf(model, filename, type, package_dirs, mesh_loader) - Replace
pinocchio.rpy.npToTTuplebypinocchio.utils.npToTTuple - Replace
pinocchio.rpy.npToTuplebypinocchio.utils.npToTuple - Replace
pinocchio.jacobianSubtreeCoMJacobianbypinocchio.jacobianSubtreeCenterOfMass
Removed
C++
- Remove
pinocchio::setGeometryMeshScales - Remove some
pinocchio::forwardDynamicssignatures - Remove some
pinocchio::impulseDynamicssignatures
Python
- Remove
pinocchio.utils.cross - Remove
pinocchio.robot_wrapper.RobotWrapper.initMeshcatDisplay - Remove
pinocchio.deprecated.setGeometryMeshScalesbypinocchio
2.7.1 - 2024-04-26
Changed
- Modify algorithm that appends a model to another (#2218)
- Set NOMINMAX as a public definitions on Windows (#2139)
- Improve documentation of
enum ReferenceFrame(#2190) - Improve documentation of
getJointJacobian(#2193).
Fixed
- CMake now uses Relative Path instead of Absolute (#2202)
- Order of frames in
ReducedModelis now the same as in the full model (#2160) - Remove a lot of warnings (#2139)
-
MeshcatVisualizerdoesn’t crash anymore when there is no collision model defined (#2147) - Fix MSVC build (#2155)
- Fix stub generation (#2166)
- Clean up empty documentation pages and sections (#2167)
- Fix SO(3) title and cross-section reference in the documentation (#2210)
Added
- Add
examples/floating-base-velocity-viewer.pyto visualize floating base velocity (#2143) - Add remark to the documentation of
getFrame(Classical)Accelerationfunctions (#2169) - Allow use of installed jrl-cmakemodules (#2216)
2.7.0 - 2024-01-23
Added
- Add
GeometryObject::meshMaterialattribute (#2084) - Add Parser for mujoco mjcf models
pinocchio::mjcf::buildModelandpinocchio::mjcf::buildGeom
Fixed
- Use bp::ssize_t for recent version of Windows compilers (#2102)
- Fix missing include for Boost >= 1.83 (#2103)
- Remove f-strings to fix install with python 2 (#2110)
- CMake: stop exporting CppAd/cppadcodegen & fetch submodule if not available (#2112)
- Fix malloc issue in CRBA algo (#2126)
- Fix build cppad and cppadcg with Boost < 1.77 (#2132)
2.6.21 - 2023-11-27
Added
- Add inverse dynamics (
rnea) Python and C++ example (#2083) - Add visualization of Frames in MeshCat viewer (#2098)
Fixed
- Re-initialize
Ycrb[0]incrbaMinimal(#2040) - Fix custom scalar use in
logfunction (#2047) - Raise exception on wrong input size in
XYZQUATToSE3Python binding function (#2073) - Remove memory leak in
buildGeomFromUrdfandbuildGeomFromUrdfStringPython binding functions (#2082https://github.com/stack-of-tasks/pinocchio/pull/2082) - Fix Panda3D viewer examples (#2087)
- Fix centroidal dynamics derivatives with respect to time (#2094))
Changed
- Rename freeflyer_joint to root_joint in
humanoidsample model (#2043) - CMake minimal version is now 3.10 (#2055)
- Split headers and sources in different directories to have a more standard C++ project (#2070)
Removed
- Remove support to
hpp-fcl< v2.0.0 (#2086)
2.6.20 - 2023-08-09
What’s Changed
- Fix support of recent versions of Boost for CppAD and CppADCodeGen by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2000
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 1e0c5aff1147d50d58bf4185a55ff564c9b6e027 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2007
- Enabled copy and deepcopy by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1882
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 9f963f67ebb889792175776c5ee00134d7bb569b by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2013
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2029
2.6.19 - 2023-06-19
What’s Changed
- Add Motion::toHomogeneousMatrix by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1946
- The insatiable English teacher PR 🧙 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1957
- require C++14 for Boost >= 1.81 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1949
- CMake: an example require python 3 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1966
- Fix IK example in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1963
- Issue templates by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1971
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1976
- Enhance CMake packaging for Windows by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1984
- Documentation by @drewhamiltonasdf in https://github.com/stack-of-tasks/pinocchio/pull/1986
- Add support for ccache on Conda build by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1987
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1988
- Enhance compatibility with new Python versions by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1996
New Contributors
- @drewhamiltonasdf made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1986
2.6.18 - 2023-04-29
What’s Changed
- Support force in pybind11 by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1868
- Fix some Python bindings signatures and add stub generation. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1869
- Fix IK example by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1875
- Remove empty examples by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1878
- build(deps): bump ros-industrial/industrial_ci from 6a8f546cbd31fbd5c9f77e3409265c8b39abc3d6 to 4b78602d67127a63dce62926769d9ec4e2ce72e4 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1890
- add static-contact-dynamics example by @PepMS in https://github.com/stack-of-tasks/pinocchio/pull/1891
- Update documentation of
JointModel.shortnamein python bindings by @Danfoa in https://github.com/stack-of-tasks/pinocchio/pull/1892 - update doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1898
- Document that joints need to be added in depth-first order by @traversaro in https://github.com/stack-of-tasks/pinocchio/pull/1899
- fix INSTALL_RPATH on ROS & OSX by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1908
- Python example: update joint placements after loading a URDF by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1911
- Remove more empty sections from the docs by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1912
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1914
- update doc for fixed joint by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1920
- doc: more information about frames on cheatsheet by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1930
- Define operational frames in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1929
- Remove support of np.matrix by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1941
- Fix other np.matrix issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1942
New Contributors
- @PepMS made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1891
- @Danfoa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1892
2.6.17 - 2023-02-15
What’s Changed
- Fix Jlog6 documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1857
- Add documentation to Jlog3 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1858
- [python/visualize] Extend visualizer features and implement them for MeshcatVisualizer by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1845
- Second-order RNEA derivatives by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1860
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1863
- Fix support of AVX2. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1865
2.6.16 - 2023-02-02
What’s Changed
- Enforce testing of Python bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1853
- Fix issue with Python 3.6 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1855
2.6.15 - 2023-01-31
What’s Changed
- More documentation for getJointJacobian by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1836
- Error when integrating SE3 with the same vector given as input and output by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1775
- Documentation for Jlog6 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1842
- remove useless header by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1846
- Fix issue with recent change on master branch for ROS-CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1847
- Fix issue with old version of Boost and eigenpy >= 2.9.0 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1851
2.6.14 - 2023-01-13
What’s Changed
- Fix registration of ptr to Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1832
2.6.13 - 2023-01-12
What’s Changed
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1790
- Skip collision pairs between geom on same joint in appendGeometryModel by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1791
- Fix issue with Boost 1.78 on OSX systems by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1792
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1793
- Add helper functions for computing supported inertia and force by frames by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1796
- Follow-up : Supported inertia by frame by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1797
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1799
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1801
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1802
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1809
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1811
- Fix Python issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1821
- Allow to use std::shared_ptr by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1822
2.6.12 - 2022-11-06
What’s Changed
- Elevate check for ambiguous input argument to an exception by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1781
- Fix packaging issues + sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1782
- Fix issue with clang by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1784
2.6.11 - 2022-10-25
What’s Changed
- URDF: fix loading relative mesh path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1748
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1750
- Add @note to difference documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1753
- Configuration limits for joints and model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1756
- Address remaining warnings + speed-up build for BUILD_TESTING=OFF by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1764
- Add status of ROS builds to README by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1770
- pinocchio/visualize: Add support for cone shape in meshcat dispaly by @whtqh in https://github.com/stack-of-tasks/pinocchio/pull/1769
- Updates README by @nikoandpiko in https://github.com/stack-of-tasks/pinocchio/pull/1776
- Enhance cmake packaging by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1777
New Contributors
- @stephane-caron made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1753
- @whtqh made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1769
- @nikoandpiko made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1776
2.6.10 - 2022-09-14
What’s Changed
- fix syntax for python 2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1734
- Expose
removeGeometryObjectin python binding by @Jiayuan-Gu in https://github.com/stack-of-tasks/pinocchio/pull/1736 - Fix relocalable by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1738
- Fix relative path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1742
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1744
New Contributors
- @Jiayuan-Gu made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1736
2.6.9 - 2022-08-12
What’s Changed
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1669
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1670
- Sync example-robot-data by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1671
- update to pybind11 v2.9.2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1674
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1678
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1677
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1679
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1692
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1691
- Fix bug in appendModel by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1693
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1695
- Fix geometry color default value by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1699
- Add python example appending Urdf and another model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1698
- SO3 diff impl use quaternion instead of rotation matrix by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1702
- add cheat sheet to doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1705
- cmake/utils: no need for python here by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1709
- Add header only target by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1712
- cmake: relocatable package for recent CMake versions by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1716
- cmake: modernize header-only lib by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1718
- ROS2/Colcon integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1719
- CMake: update to eigenpy 2.7.10 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1720
- Fix weird test failure on Conda by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1723
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1727
- ROS2 release support by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1681
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1732
New Contributors
- @fabinsch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1698
2.6.8 - 2022-06-06
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1648
- Fix integrate method for SO2 by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1652
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1653
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1658
- Extend current Coriolis computations to account for Cristoffel symbol of first kind by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1665
- Fix method play() of rviz_visualizer by @danielcostanzi18 in https://github.com/stack-of-tasks/pinocchio/pull/1667
- chore: Included githubactions in the dependabot config by @nathannaveen in https://github.com/stack-of-tasks/pinocchio/pull/1659
- Enable ubuntu 22.04 on CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1668
New Contributors
- @pre-commit-ci made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1648
- @Toefinder made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1652
- @danielcostanzi18 made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1667
- @nathannaveen made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1659
2.6.7 - 2022-05-03
What’s Changed
- add dummy .pre-commit-config.yaml by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1629
- Avoid triggering multi-line comment in Latex formula by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1630
- Make Pinocchio v2 compatible with HPP-FCL v2 by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1631
- Add example of collision with a point cloud by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1636
- follow up on hpp-fcl v2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1637
- Fix pickling for Boost >= 1.7.4 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1640
2.6.6 - 2022-03-22
What’s Changed
- Support HPP-FCL for ROS binaries & introduce ROS2 ament integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1622
2.6.5 - 2022-02-14
What’s Changed
- Fix warning issue in Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1546
- RVizVisualizer update by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1549
- Correct link to examples. Removed python subdirectory in the link as the directory does not exist anymore by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1561
- Add CONTRIBUTING.md file for newcomers by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1563
- Add list of projects based on Pinocchio by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1566
- Fix constrained dynamics formula by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1567
- Append “/share” to AMENT_PREFIX_PATH by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1568
- Expose dIntegrateTransport by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1572
- [timings] Reduce allocations in finite-difference baselines by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1583
- [computeAllTerms] Add missing noalias to avoid temporary allocation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1582
- Missing
noaliasby @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1585 - [multibody/model] add joint arg validation by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1586
- [multibody/geometry] Add method to remove an object. by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1588
- Fix bug in ABAChecker by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1599
- Update README.md by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1604
- allow
robot_wrapperto share data with itsvizby @vnghia in https://github.com/stack-of-tasks/pinocchio/pull/1606
New Contributors
- @duburcqa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1585
- @vnghia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1606
2.6.4 - 2021-11-02
What’s Changed
- Change ‘typedef’ to ‘using’, add curly braces by @the-raspberry-pi-guy in https://github.com/stack-of-tasks/pinocchio/pull/1476
- [CMake] set INSTALL_RPATH for python on linux by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1482
- [visualize] captureImage() method by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1480
- ci: update ROS CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1483
- Fix issue with Pool when FCL is missing by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1485
- fix module name by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1487
- Add RVizVisualizer by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1488
- fix reshape issues by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1489
- Remove useless reference to L-GPL + remove of useless files by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1500
- Update old function, remove mobile robot wrapper by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1490
- Allows the display of {COLLISION,VISUAL} in MeshCat by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1502
- Delete submodule travis by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1509
- Add citation by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1511
- badges: add PyPI by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1510
- Add support of Convex within MeshCat + improve GeometryObject bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1530
- [python] Fix BaseVisualizer constructor. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1533
- [python] Add pybind11 header. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1519
- make copy of supports during model cast by @rubengrandia in https://github.com/stack-of-tasks/pinocchio/pull/1536
- [python] Simplify buildGeomFromUrdf and allow to build from string. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1538
- Sync submodule by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1542
- Turn off automatic documentation generation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1541
New Contributors
- @the-raspberry-pi-guy made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1476
- @ManifoldFR made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1480
- @EtienneAr made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1488
- @kozakromch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1489
- @rubengrandia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1536
2.6.3 - 2021-07-27
This new release fixes bugs in MeshCat rendering, loading of ROS path and in the Centroidal dynamics derivatives
2.6.2 - 2021-07-05
This new release provides fixes include orders in the unit tests due to recent versions of Boost. It also provides more content to the Readme. This new release prefigures the new Pinocchio 3.x
2.6.1 - 2021-06-08
Enhancement:
- extended support of serialization of FCL primitives
- extended support of Boost.Variant in Python
Fixes:
- fix bug when loading URDF on Windows
- fix handling of Frame inertia
2.6.0 - 2021-04-11
This new release provides:
- improvement for handling collision/distance requests
- support of parallel computations for ABA, RNEA and collisions algorithms (more to come soon)
- additional features for the RobotWrapper in Python
- support of Capsule for Meshcat
- happened Inertia information to Frames
- fixes for doc issues
- improve numerical robustness when two inertias are Zero
2.5.6 - 2021-01-23
This new release comes with a more consistent ABA algorithm (data.a_gf used instead of classic data.a) and more outcomes for computeAllTerms. In addition, it provides some extended supports to PyPy.
2.5.5 - 2021-01-07
This maintenance release enhances the whole CMake packaging of the project and provides additional features for the Python bindings.
2.5.4 - 2020-11-26
This new release enhances the compatibility of Pinocchio with former distributions, provides better support to Euler angles and fixes some bugs.
2.5.3 - 2020-11-13
This new release fixes some issues with the Python bindings, add new examples and extend the whole tests.
2.5.2 - 2020-11-02
This new release enhances the compatibility with Windows, provides new tools eitheir to work on joint configurations and also to compute the kinematic regressors.
2.5.1 - 2020-10-12
This new release provides:
- improvements on the whole project coverage
- better support of Windows v142
- support of joint friction and damping (only at the interface level)
- new algorithm to retrieve the Coriolis matrix from RNEA/ABA derivatives
2.5.0 - 2020-08-31
In this new release, we have:
- a full memory shared in the Python bindings, i.e. that all the Eigen object can now be changed in Python.
- better handling of multiprecision arithmetic
- improved CMake packaging
- fix for Autodiff
2.4.7 - 2020-07-20
This new release provides:
- an extended API for dealing with Lie groups and the related computations (integration, difference, derivatives, etc.)
- the Lie groups have now their Python bindings for easy code prototyping
- the kinematics derivatives of the Frames have been introduced as well as the extension of current Joints derivatives
- the packaging of the project has been improved too.
2.4.6 - 2020-06-15
This new release of Pinocchio removes the use of pkg-config to check dependencies and provides a full compatibility and support for Windows systems.
2.4.5 - 2020-05-23
This new release extends the current frames algorithms to also consider the LOCAL_WORLD_ALIGNED reference frame. It also exposes the values of the enum_ for simplified usage.
2.4.4 - 2020-05-13
This new release provides:
- new helpers function to retrieve frame velocities and accelerations
- for each collision pair, it is now possible to provide specific collision checking settings
- support to display convex hulls in viewers
It also fixes:
- the support of Panda3d
and enhances the global CMake packaging of the project.
2.4.3 - 2020-04-24
This new release provides a new Viewer, named Panda3d, for easy code visualization in Python. It also provides additional fixes to the Code Generation support.
2.4.2 - 2020-04-21
This new release of Pinocchio provides new features for dealing with Lie groups:
- improved operations over the differential operations of the integrate function
- new functions for transporting some matrix between the two endpoints of the integrate function
- the RPY functions are now robust over singularities
- the support of autodiff frameworks has been improved to also cope with Lie groups features
This release also provides:
- a packaging fixe with respect to the URDFDOM dependency
- the Python bindings should now be without memory leak
2.4.1 - 2020-04-15
This new release fixes a bug introduced in Pinocchio 2.4.0 concerning the method ModelTpl::addFrame. This release also provides better support for the checking of the CppAD and CppADCodeGen versions.
2.4.0 - 2020-04-09
This new release of Pinocchio makes several improvements:
- improve compatibility with hpp-fcl
- improve compatibility with CppAD and notably the Lie algebra features
- a better CMake >= 3.0 export of the project
- new examples for Code generation
- improved Python bindings
- improved support for Boost.Multiprecision
- reduce the memory usage when compilation unit tests
and we have started to move some dependencies like urdfdom to the pinocchio.so library to avoid additional compilations issues and to useless compilations burden.
2.3.1 - 2020-02-20
This new release provides:
- some fixes with respect to minor bugs introduced in Pinocchio 2.3.0
- an enhance detection of Python
- improves the compilation memory overhead
2.3.0 - 2020-02-18
This new release provides:
- full compatibility with CMake export
- full compatibility with Numpy.Array
- examples for Code generation
- better support of C++11
- minor bug fixes
- improves coverage
- uniformizes function signature
- improves interoperability between Numpy and Pinocchio
- add many examples
- full integration of Python bindings of hpp-fcl
- supports the pickling and the serialization of Data
2.2.3 - 2019-12-30
This new release provides:
- pickling and serialization of Data structures
- provide new algorithms to create reduce models
It also improves the compatibility with the Transform used in HPP-FCL. It also fixes various bugs. It also comes with new and detailed examples.
2.2.2 - 2019-12-11
This new release:
- improves the compatibility with HPP-FCL bindings
- improves the documentation of the project with more examples
- fixes some bugs related to Eigen
- add new algorithms to compute the centroidal matrix and its time derivatives
2.2.1 - 2019-11-25
This new release fixes the ROS package version number and updates the robot models.
2.2.0 - 2019-11-25
This new release of Pinocchio introduces:
- analytical formula for Hessian of the kinematics
- derivatives of the difference operation
- new derivatives for static torque quantity
- new models for tests and examples.
It adds some signature non-exposed in Python. It also deletes outdated function signatures that have been deprecated in 2.0.x versions. It also improves the packaging with respect to ROS or other robotics frameworks.
2.1.11 - 2019-10-27
This release fixes missing update of the ROS package.xml file with the new version.
2.1.10 - 2019-10-25
This new release allows throwing when some input arguments are not fulfilled (useful feature in Python). It also provides new support for Hessian of the kinematics. Finally, the project is now packaged for ROS integration.
2.1.9 - 2019-10-09
This is a maintenance release, with some fixes concerning the contact dynamics, better support of LOCAL_WORLD_ALIGNED option and fixes with respect to some recent versions of CppADCodeGen.
2.1.8 - 2019-09-30
This is a maintenance release providing several fixes:
- remove memory allocation in ABA derivatives with contact forces
- better handling of boost::Variant
- better support of Majax
It also provides new features in the documentation of mathematical formula.
2.1.7 - 2019-09-10
This new release improves:
- the support of AutoDiff frameworks
- the efficiency of some core algorithms
fixes:
- the support of Majax
- the compatibility with Python 2/3
2.1.6 - 2019-08-05
This new release improves the packaging of the project and provides new algorithms to compute the Jacobians of the center of mass of each subtree.
2.1.5 - 2019-07-16
This new release provides support for JointMimic and JointRevoluteUnboundedUnaligned. It also comes with the full support of CasADi.
Thanks to @mkatliar for helping us to provide this support.
2.1.4 - 2019-06-22
This new release provides some fixes with respect to Python bindings, C++17 as well as new important features:
- dynamic regressor for identification
- add support of multiple viewers
- improve analytical derivatives
2.1.3 - 2019-04-30
This new release fixes some issues with Python 3 and C++17 standard. It also provides additional documentation, enlarges the current Python bindings and uniformizes naming convention in Python.
2.1.2 - 2019-04-05
This new release aims at fixing compilations issues when COLLISION module is activated. It also provides some fixes concerning the loading of meshes.
A new feature provided by this release concerns the possibility of appending two models together.
2.1.1 - 2019-03-27
This new release fixes compatibility bugs with previous release 2.1.0. It also provides a serialization interface for Spatial classes and the Model class.
2.1.0 - 2019-02-27
This new release makes some major improvements:
- it is now possible to use MeshCat, another viewer working in the browser directly in Python
- the Python bindings are now hardly tested and uniformized with respect to the C++ API
- this new release is compatible with recent releases of
hpp-fcl - the SRDF parsing has been improved. Its now possible to load several reference configuration vectors
We also fixed bugs related to recent versions of Boost mostly.
2.0.0 - 2019-01-11
Welcome Pinocchio 2.0.0.
This release makes official the last important and new features for efficiently computing the dynamics of the rigid body systems:
- Analytical derivatives
- Automatic differentiation
- Full scalar type overloading
- Code generation among others
1.3.3 - 2018-10-29
This is for real the last release before Pinocchio 2.0.0 and more.
This release fixes the packaging when hpp-fcl is missing. Thanks to @aelkhour for raising this issue.
1.3.2 - 2018-10-26
This release is the last one before Pinocchio 2.0.0.
It mostly:
- fixes issues introduced by new API of frame functionalities;
- introduces new sample models for manipulator and humanoid systems;
- fixes bugs due to boost 1.58.0;
- improve the readme with credits section.
1.3.1 - 2018-09-25
This new release corrects some bugs or bad deprecations concerning Pinocchio 1.3.0.
1.3.0 - 2018-08-28
This new release introduces analytical derivatives in the corpus of Pinocchio. This feature is still under development but can already be used both in C++ and Python.
This new release also fixes a bunch of bugs related to Eigen and Boost.
1.2.9 - 2018-06-01
This is mostly a maintenance release:
- Fix bug in. lower bounds in Model class
- Update documentation structure (additional work is needed)
- Improve the compatibility with Python 3.x
1.2.8 - 2018-05-18
This is mostly a maintenance release:
- Fix some bugs in JointModel{Translation,Spherical} for ABA algorithm
- Fix a duplication issue in RobotWrapper
- Improve compatibility with recent version of Boost >= 1.67.0
- Romeo is now loaded from the official romeo_description repository
1.2.7 - 2018-04-03
This is mostly a maintenance release:
- Fixes and computation improvements for Lie group operations.
- Adding pickle for spatial classes.
- Allow loading of URDF tree directly from an XML stream.
1.2.6 - 2018-01-15
This is mostly a maintenance release with various fixes to comply with Boost variadic macro on recent OS. It also adds new convention with a LOCAL and a WORLD frame to express Jacobian quantities.
1.2.5 - 2017-10-10
This a maintenance Release. We added some algo to compute the time variation of the Jacobians together with the variation with respect to time of the centroidal momemtum matrix. HPP-FCL works now with Eigen for linear algebra.
1.2.4 - 2017-06-09
This is mostly a maintenance release, with some fix with respect new urdfdom versions, it handles Eigen support with hpp-fcl.
1.2.3 - 2017-02-14
This release fixes some issues with respect to 1.2.1.
API modifications
Interpolate, Differentiate, Integrate are now algorithmic struct which can be efficiently overloaded.
Bindings
Add FCL object bindings
1.2.1 - 2016-10-17
Summary
This release is a minor patch of the previous release 1.2.0.
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New
- The Python bindings are aligned and free of unnecessary allocations
- Add documentation option which allows to not install the documentation
- Introduces container::aligned_vector to automatically create an std::vector with specific aligned allocator
API modifications
- Remove JointDense.
- Remove JointGeneric
Fixes
- Solves the parsing of geometries in URDF module
- Fixes alignment issues on 32 bits architecture
1.2.0 - 2016-09-29
Summary
The main modifications concern the update of the code to comply with the Humanoid Path Planner (HPP).
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Add Joint{Model,Data} classes based on Joint{Model,Data}Base and Joint{Model,Data}Variant. Those classes call directly the visitors and make Variant accessible throw methods
- Add partial Joint{Model,Data}Composite. They allow a stack of joints without adding any Inertia.
- Increase Frame class. Frames can be of several types (BODY, JOINT, SENSOR, etc) and reflect the robot tree as it appears in the URDF conventions. Frames have two attributes: parent which the direct Joint parent in the Joint tree, previousFrame which correspond to the parent Frame in the tree of Frames).
- Adding Python parser which is able to read models written in Python.
- Add algo checker to check the validity of a model.
- Improve documentation.
API modifications
- Model has some methods deprecated. The default name has been removed.
- The Geometry classes have been updated and several methods have been set to deprecated. They now use Frames as parent instead of Joint directly: a Geometry is now supported by a BODY.
- Add active collision pair flags in GeomData which define the active collision pairs.
- Unify naming conventions (nframes, njoints, etc).
Fixes
- The UDRF parser can now deal with more complex topologies. It properly handles the stack of geometries for each BODY.
- Improve packaging mainly around the Python part.
1.1.2 - 2016-05-31
Summary
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Added operational frames (that are a Plucker coordinate frame attached to a parent joint inside a kinematic tree). Position and Jacobian of such frames can be computed
- Geometry primitives can now be handled (and added to the Pinocchio GeometryModel) when encountered in an urdf file
- Implemented simple srdf parsing for GeometryData : parse the desactivated collision pairs
- Added Articulated Body Algorithm (ABA), and CCRBA
- When parsing a urdf file, now look in the environment variable ROS_PACKAGE_PATH for directories where to search for meshes. Users can provide hint directories to search in as a priority. Updated python RobotWrapper consequently
- Added forward dynamics with contact algorithm
- Added algorithms working with vectors of configuration or velocity(either on a JointModel or on a Model, iterating through all the kinematic tree)
- One can integrate a configuration at a constant velocity during a unit time
- One can differentiate two configurations (i.e compute the velocity that must be integrated during a unit time to go from first configuration to the other )
- One can interpolate between two configurations
- One cancompute the distance between two configurations ( such as dist = norm ( difference) )
- One can shoot a configuration uniformly sampled between specified limits
- Added Impulse Dynamic Algorithm
- Completed the list of method to access or call Joint’s data or method when joint are stored in a variant.
- Added JointAccessor that is a general joint encapsulating a JointVariant ( abstracting the use of visitors for the user).
API modifications
- Moved limits from joint models to Model as vectors of size nq for position limits and size nv for velocity and effort limits
- The Geometry objects stored in GeometryModel are now splitted in two types : visual and collision
Minor
- Improved documentation of Data, Model, Spatial Classes
- Improved efficiency when executing algorithms
- One can now create Inertia for simple shapes such as cylinders, boxes, ellipsoid
- Rework some unittests to increase to coverage of whole package ( C++ and Python )
Bugs Fixed
- Fixed operator Inertia x constraint in JointSphericalZYX
- Fixed the Dense conversion of joints (models and datas)
- Fixed bugs in JointRevoluteUnaligned and JointPrismaticUnaligned to access the access when visiting a variant containing such joints with boost::fusion
1.1.0 - 2016-02-04
Summary
New Features
- Spatial classes now follow the CRTP Design Pattern, for performance reasons.
- JointModels are now exposed in Python. This feature enables one to load a URDF model with a precise root joint and to create his/her own model.
- Python models can now be created by hand ( ex: buildEmptyModel() + calls to addBody() )
- Added utility tools to check an urdf model ( same as check_urdf but dislpay the Pinocchio model created from urdf parsing)
- Add unaligned prismatic joint
- Add geometry through Flexible Collision Library (hpp-fcl)
- Add dedicated structs to handle geometry. GeometryModel (list of geometry objects and its relation wrt kinematic model) and GeometryData
- When parsing urdf, meshes can be read from collada files and handled in Pinocchio
- Created parser that handles geometry and exposed it in python
- Add algorithms to update the geometry kinematics, to compute the distances for pairs of collision or if they are colliding or not.
- Added algorithms to compute the kinetic energy, the potential energy and exposed it in python
- The complete documentation is in progress
API modifications
- Change name of kinematics algorithms: now forwardKinematics instead of previous geometry, kinematics and dynamics.
Minor
- SimpleHumanoid is now built with joint limits
- Handle floating joints in urdf parsing
- Slight separation between joints and body in Model to avoid confusion
- Internally, Motion and Force classes now use a 6D-vector instead of two 3D-vectors for linear and angular part
Bugs Fixed
- Fixed a bug when trying to merge a link with its parent in case of fixed joint. Now merge only if it has an inertial tag.
- All the algorithms are now set to inline
- Fix compilation errors
Installation
The source of the release are available in the file pinocchio-1.1.0.tar.gz just below along with a binary version for 64-bits Debian architecture of Pinocchio **pinocchio_1.1.0amd64.deb** and its dependencies. For information, those packages will be installed in _/opt/openrobots directory.
1.0.2 - 2015-09-14
Summary
New Features
- The limits in position, velocity and torque for joints Revolute and Prismatic are now parsed from urdf model and accessible
- Implementation of exp and log functions on SE3 in C++ with its python binding thanks to @aelkhour
- Data now contains information relative to the center of mass position, velocity and acceleration
- Add Lua parser - compatible with RBDL
- Add translational joint
- Add planar joint
Minor
- Reduction of compilation warnings.
Bugs Fixed
- Fixed bug in operator Y*S in JointRevoluteUnaligned
1.0.0 - 2015-04-03
The following algorithms are implemented. • Recursive Newton-Euler algorithm (RNEA, i.e inverse dynamics) • Composite Rigid Body algorithm (CRBA, i.e generalized inertia matrix) • Sparse Cholesky decomposition of the inertia matrix (for constrained forward-dynamics resolution) • Placement Jacobians (i.e application from configuration velocities to end-effector spatial velocities), along with computation of body placements, velocities and accelerations. • Center of mass and its Jacobian
The model can either be parsed from a URDF format or be created by appendending bodies. The following joint models are implemented. • Revolute X, Y, Z (optimized) and unaligned with Cartesian directions • Prismatic X, Y, Z • Spherical (with and withoug singularities) • FreeFlyer (i.e. no constraint, for mobile robots like humanoids – using quaternion representation for the rotation) • Fixed (concatenation of two consecutive bodies)
Wiki Tutorials
Dependant Packages
| Name | Deps |
|---|---|
| kinematics_interface_pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged pinocchio at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.3.1 |
| License | BSD-2 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stack-of-tasks/pinocchio.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-01-13 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Justin Carpentier
- Wolfgang Merkt
Authors
![]()
![]()
![]()
![]()
Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone’s algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
Pinocchio was first tailored for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.). It is built upon Eigen for linear algebra and FCL for collision detection. Pinocchio comes with a Python interface for fast code prototyping, directly accessible through Conda.
Pinocchio is now at the heart of various robotics software as Crocoddyl, an open-source and efficient Differential Dynamic Programming solver for robotics, the Stack-of-Tasks, an open-source and versatile hierarchical controller framework or the Humanoid Path Planner, open-source software for Motion and Manipulation Planning.
If you want to learn more about Pinocchio internal behaviors and main features, we invite you to read the related paper and the online documentation.
If you want to dive into Pinocchio directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
Table of contents
- Table of contents
- Introducing Pinocchio 3
- Pinocchio main features
- Documentation
- Examples
- Tutorials
- Pinocchio continuous integrations
- Performances
- Ongoing developments
- Installation
- Visualization
- Citing Pinocchio
- Questions and Issues
- Credits
- Open-source projects relying on Pinocchio
- Acknowledgments
Introducing Pinocchio 3
Pinocchio3 is the latest major release of Pinocchio. It comes with multiple new features, such as:
- Sparse constrained dynamics and its analytical derivatives
- Full support of closed-loop mechanisms
- State-of-the-art frictional contact solvers
- Low-complexity constrained articulated body algorithms
- Full support of multiple-precision floating-point (MPFR) in Python and C++
- Full CasADi support in Python and C++
- Increased support of CppAD and CppADCodeGen
- New SDF and MJCF parsers
- and much more.
Pinocchio main features
Pinocchio is fast:
- C++ template library,
- cache friendly,
- automatic code generation support is available via CppADCodeGen.
Pinocchio is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- support multiple precision arithmetic via Boost.Multiprecision or any similar framework,
- computations of kinematic and dynamic regressors for system identification and more,
- and much more with the support of modern and open-source Automatic Differentiation frameworks like CppAD or CasADi.
Pinocchio is flexible:
- header only,
- C++ 98/03/11/14/17/20 compliant.
Pinocchio is extensible. Pinocchio is multi-thread friendly. Pinocchio is reliable and extensively tested (unit-tests, simulations, and real-world robotics applications). Pinocchio is supported and tested on Windows, Mac OS X, Unix, and Linux (see build status here).
Documentation
The online Pinocchio documentation of the last release is available here. A cheat sheet pdf with the main functions and algorithms can be found here.
Examples
In the examples directory, we provide some basic examples of using Pinocchio in Python. Additional examples introducing Pinocchio are also available in the documentation.
Tutorials
Pinocchio comes with a large bunch of tutorials aiming at introducing the basic tools for robot control. Tutorial and training documents are listed here. You can also consider the interactive Jupyter notebook set of tutorials developed by Nicolas Mansard and Yann de Mont-Marin.
Pinocchio continuous integrations
Pinocchio is constantly tested for several platforms and distributions, as reported below:
| CI on ROS | |
| CI on Linux via APT | |
| CI on OSX via Conda | |
| CI on Windows via Conda | |
| CI on Linux via Robotpkg | |
Performances
Pinocchio exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, Pinocchio can unroll most of the computations directly at compile time, allowing to achieve impressive performances for a large range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical paper. In addition, the introspection may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
Ongoing developments
If you want to follow the current developments, you can directly refer to the devel branch. The master branch only contains the latest release. Any new Pull Request should then be submitted on the devel branch.
Installation
Pinocchio can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the installation procedure.
Conda
You simply need this simple line:
conda install pinocchio -c conda-forge
ROS
Pinocchio is also deployed on ROS. You may follow its deployment status below.
If you’re interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA. Here, you can install Pinocchio using:
sudo apt install ros-$ROS_DISTRO-pinocchio
This installs Pinocchio with HPP-FCL support and with Python bindings. You can then use Pinocchio in your ROS packages by:
- Depending on Pinocchio in your
package.xmlconfig (<depend>pinocchio</depend>) - Including Pinocchio via CMake (
find_package(pinocchio REQUIRED)) and linking against Pinocchio (target_link_libraries(my_library pinocchio::pinocchio))
We include support and hooks to discover the package for both ROS 1 and ROS 2. Examples can be found at the following repositories:
Please note that we always advise including the pinocchio/fwd.hpp header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 1 | ROS 2 | |||
|---|---|---|---|---|
| Melodic | Foxy | |||
| Noetic | Galactic | |||
| Humble | ||||
| Rolling |
Visualization
Pinocchio provides support for many open-source and free visualizers:
- Gepetto Viewer: a C++ viewer based on OpenSceneGraph with Python bindings and Blender export. See here for a C++ example on mixing Pinocchio and Gepetto Viewer.
- Meshcat: supporting visualization in Python and which can be embedded inside any browser.
- Panda3d: supporting visualization in Python and which can be embedded inside any browser.
- RViz: supporting visualization in Python and which can interact with other ROS packages.
Many external viewers can also be integrated. For more information, see the example here.
Citing Pinocchio
To cite Pinocchio in your academic research, please consider citing the software paper and use the following BibTeX entry:
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
And the following one for the link to the GitHub codebase:
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
Citing specific algorithmic contributions
Pinocchio goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning and control. Pinocchio provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc. If you use these algorithms, please consider citing them in your research articles.
- Le Lidec, Q., Montaut, L. & Carpentier, J. (2024, July). From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach. In RSS 2024-Robotics: Science and Systems.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). GJK++: Leveraging Acceleration Methods for Faster Collision Detection. IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). Constrained Articulated Body Dynamics Algorithms. Under review.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). Differentiable collision detection: a randomized smoothing approach. In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2023). Contact models in robotics: a comparative analysis. Under review.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). Collision Detection Accelerated: An Optimization Perspective. In Robotics: Science and Systems (RSS 2O22).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). Proximal and sparse resolution of constrained dynamic equations. In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018).
Questions and Issues
Do you have a question or an issue? You may either directly open a new question or a new issue or, directly contact us via the mailing list pinocchio@inria.fr.
Credits
The following people have been involved in the development of Pinocchio and are warmly thanked for their contributions:
- Justin Carpentier (Inria): main developer and manager of the project
- Nicolas Mansard (LAAS-CNRS): initial project instructor
- Guilhem Saurel (LAAS-CNRS): continuous integration and deployment
- Joseph Mirabel (Eureka Robotics): Lie groups and hpp-fcl implementation
- Antonio El Khoury (Wandercraft): bug fixes
- Gabriele Buondono (LAAS-CNRS): features extension, bug fixes, and Python bindings
- Florian Valenza (Astek): core developments and hpp-fcl support
- Wolfgang Merkt (University of Oxford): ROS integration and support
- Rohan Budhiraja (LAAS-CNRS): features extension
- Loïc Estève (Inria): Conda integration and support
- Igor Kalevatykh (Inria): Panda3d viewer support
- Matthieu Vigne (Wandercraft): MeshCat viewer support
- Robin Strudel (Inria): features extension
- François Keith (CEA): Windows support
- Sarah El Kazdadi (Inria): multi-precision arithmetic support
- Nicolas Torres Alberto (Inria): features extension
- Etienne Arlaud (Inria): RViz viewer support
- Wilson Jallet (LAAS-CNRS/Inria): extension of Python bindings
- Fabian Schramm (Inria): core developper
- Shubham Singh (UT Austin): second-order inverse dynamics derivatives
- Stéphane Caron (Inria): core developper
- Joris Vaillant (Inria): core developer and manager of the project
- Sebastian Castro (The AI Institute): MeshCat viewer feature extension
- Lev Kozlov: Kinetic and potential energy regressors
- Megane Millan (Inria): Features extension and core developer
- Simeon Nedelchev: Pseudo inertia and Log-Cholesky parametrization
- Ajay Sathya (Inria): core developer
If you have participated in the development of Pinocchio, please add your name and contribution to this list.
Open-source projects relying on Pinocchio
- Crocoddyl: A software to realize model predictive control for complex robotics platforms.
- TSID: A software that implements a Task Space Inverse Dynamics QP.
- HPP: A SDK that implements motion planners for humanoids and other robots.
- Jiminy: A simulator based on Pinocchio.
- ocs2: A toolbox for Optimal Control for Switched Systems (OCS2)
- TriFingerSimulation: TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- Casadi_Kin_Dyn: IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- PyRoboPlan: An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- ProxSuite-NLP: A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- Aligator: A versatile and efficient framework for constrained trajectory optimization.
- Simple: The Simple Simulator: Simulation Made Simple.
- LoIK: Low-Complexity Inverse Kinematics.
Acknowledgments
The development of Pinocchio is actively supported by the Gepetto team @LAAS-CNRS and the Willow team @INRIA.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Add parsing meshes with vertices for MJCF format (#2537)
Fixed
- Fix mjcf Euler angle parsing: use xyz as a default value for eulerseq compiler option (#2526)
- Fix variable naming in Python (#2530)
- Fix aba explicit template instantiation (#2541)
- CMake: fix RPATH on macos (#2546)
- Fix aba explicit template instantiation (#2541)
- Fix mjcf parsing of keyframe qpos with newlines (#2535)
- Fix sites parsing for MJCF format (#2548)
3.3.1 - 2024-12-13
Added
- Add
pinocchio_python_parsertarget (#2475)
Fixed
- Fix mjcf parsing of armature and of the default tag in models (#2477)
- Fix undefined behavior when using the site attribute in mjcf (#2477)
- Fix the type of image paths when loading textures in the meshcat visualizer (#2478)
- Fix meshcat examples ([#2503])[https://github.com/stack-of-tasks/pinocchio/pull/2503]
- Fix
pinocchio-test-cpp-parallel-geometrywhen built with Coal (#2502) - Fix scaling support for meshcat (#2511)
Changed
- On GNU/Linux and macOS, hide all symbols by default (#2469)
- Build
pinocchio_defaultwith collision features (#2517)
3.3.0 - 2024-11-06
Added
- Default visualizer can be changed with
PINOCCHIO_VIEWERenvironment variable (#2419) - Add more Python and C++ examples related to inverse kinematics with 3d tasks (#2428)
- Add parsing of equality/connect tag for closed-loop chains for MJCF format (#2413)
- Add compatibility with NumPy 2
__array__API (#2436) - Added argument to let users decide of root joint name when parsing models (urdf, mjcf, sdf) (#2402)
- Allow use of
pathlib.Path | strfor paths in python bindings (#2431) - Add Pseudo inertia and Log-cholesky parametrization (#2296)
- Add Pixi support (#2459)
Fixed
- Fix linkage of Boost.Serialization on Windows (#2400)
- Fix mjcf parser appending of inertias at root joint (#2403)
- Fix unit tests with GCC 13.3 (#2406
- Fix class abstract error for Rviz viewer (#2425)
- Fix compilation issue with MSCV and C++17 (#2437)
- Fix
pinocchio-test-py-robot_wrapperwhen building with SDF and collision support (#2437) - Fix crash when calling
Inertia::FromDynamicParametersin Python with wrong vector size (#2296) - Fix
examples/cassie-simulation.pyandexamples/talos-simulation.py(#2443) - Fix build with CppAd 2024 (#2459)
- Fix
pinocchio-test-cpp-mjcfunittest with Boost 1.86 (#2459) - Fix
pinocchio-test-cpp-constraint-variantsuninitialized values (#2459) - Fix mixing library symbols between Pinocchio scalar bindings (#2459)
- Fix bug for get{Joint,Frame}JacobianTimeVariation (#2466)
Changed
- Modernize python code base with ruff (#2418)
- Does not create a root_joint frame from parsed models (urdf, mjcf and sdf) when no root joint is provided (#2402)
3.2.0 - 2024-08-27
Fixed
- Append pinocchio optional libraries into pkg-config file (#2322)
- Fixed support of DAE meshes with MeshCat (#2331)
- Fixed pointer casts in urdf parser (#2339)
- Remove CMake CMP0167 warnings (#2347)
- Fixed urdfdom in ROS packaging (#2341)
- Fixed overview-urdf cpp example (#2384)
- Fixed mjcf model without a base link parsing (#2386)
- Fixed talos-simulation.py, simulation-contact-dynamics.py and simulation-closed-kinematic-chains.py examples (#2392)
Added
- Add getMotionAxis method to helical, prismatic, revolute and ubounded revolute joint (#2315)
- Add initial compatiblity with coal (coal needs
-DCOAL_BACKWARD_COMPATIBILITY_WITH_HPP_FCL=ON) (#2323) - Add compatibility with jrl-cmakemodules workspace (#2333)
- Add
collision_colorparameter toMeshcatVisualizer.loadViewerModel(#2350) - Add
BuildFromMJCFfunction to RobotWrapper (#2363) - Add more CasADi examples (#2388)
Removed
- Remove deprecated headers related to joint constraints (#2382)
Changed
- Use eigenpy to expose
GeometryObject::meshMaterialvariant (#2315) - GepettoViewer is no more the default viewer for RobotWrapper (#2331)
- Modernize python code base with ruff (#2367)
- Restructure CppAD and CasADi examples (#2388)
- Enhance and fix CppAD benchmarks outputs (#2393)
3.1.0 - 2024-07-04
Fixed
- Fix
appendModelwhen joints after the base are in parallel (#2295) - Fix
appendModelbuild when called with template arguments different than the ones fromcontext(#2284) - Fix
TransformRevoleTpl::rotationandTransformHelicalTpl::rotationbuild (#2284) - Fix compilation issue for Boost 1.85 (#2255)
- Fix python bindings of
contactInverseDynamics(#2263) - Deactivate
BUILD_WITH_LIBPYTHONwhen building with PyPy (#2274) - Fix Python bindings cross building with
hpp-fcl(#2288) - Fix build issue on Windows when a deprecated header is included (#2292)
- Fix build issue on Windows when building in Debug mode (#2292)
- Fix visualization of meshes in meshcat (#2294)
- Fix Anymal simulation test (#2299)
- Fix contact derivatives and impulse dynamics tests (#2300)
- Fix CMake compatibility with old console_bridge version (#2312)
Added
- Python unittest for
contactInverseDynamicsfunction (#2263) - Added helper functions to return operation count of CasADi functions. (#2275)
- C++ and Python unittest for
dIntegrateTransportto check vector transport and its inverse (#2273) - Add kinetic and potential energy regressors (#2282)
Removed
- Remove header
list.hppinclude for bindings of model and rnea (#2263)
3.0.0 - 2024-05-27
Added
Automatic differentiation
- Full support of Casadi in the main library by @jcarpent and @ManifoldFR
- Full support of Casadi for Python bindings by @jcarpent
- Full support of Boost.Multiprecision in the main library by @jcarpent
- Full support of Boost.Multiprecision for Python bindings by @jcarpent
- Full support of CppAD and CppADCodeGen in the main library by @jcarpent
- Full support of CppAD and CppADCodeGen for Python bindings by @jcarpent and @proyan
Core features
- Full support of constrained dynamical systems by @jcarpent
- Full support of derivatives of constrained dynamical systems by @jcarpent and @proyan
- Extended algorithms for constrained dynamics: constrained ABA, PV solvers, etc. by @jcarpent and @AjSat
- Add frictional contact solvers (PGS, ADMM) by @jcarpent
- Add contact inverse dynamics by @quentinll
- Full support of broadphase algorithms in Pinocchio by @jcarpent
- New joint supports (Helicoidal, Universal) by @fabinsch and @MegMll
- Add new algorithms for supporting Delassus factorizations for sparse, dense and tree-based systems by @jcarpent
- Add full OpenMP support for many algorithms (ABA, RNEA, collision detection, etc.) by @jcarpent
- Full support of GeometryModel, GeometryObject serialization by @jcarpent
- Extended support of Meshcat by @jcarpent, @ManifoldFR and @jorisv
- Extended testing and support of Lie groups operations by @jcarpent and @ManifoldFR
- Full support of AVX512 and AVX2 vectorization for Python bindings by @jcarpent
- Full support of the robot armature in RNEA, CRBA and ABA
- Extended formulation of CRBA and ABA using WORLD convention for reduced computational burden in the derivative algorithms
Parsers
Extra Algorithms
- Added reachable workspace computation and vizualisation in collaboration with @askuric based on pycapacity by @MegMll and @jorisv
Packaging
- Full support of template instantiation by @fabinsch and @jorisv
- Enhance support for Windows-based systems by @jorisv
- Splitting of the Pinocchio into sub-library for isolation by @jorisv
Compatibility
- Add
PINOCCHIO_ENABLE_COMPATIBILITY_WITH_VERSION_2define to activate compatibility with Pinocchio 2 API
Changed
C++
- Change minimum required version of C++ to C++11. Check for compatibility here: https://en.cppreference.com/w/cpp/compiler_support/11
- Replace
pinocchio::BiasZeroTplbypinocchio::MotionZeroTpl - Replace
pinocchio::fusion::JointVisitorBasebypinocchio::fusion::JointUnaryVisitorBase - Replace
pinocchio::fusion::push_frontbypinocchio::fusion::append - Replace
pinocchio::regressor::computeStaticRegressorbypinocchio::computeStaticRegressor - Replace
pinocchio::jointJacobianbypinocchio::computeJointJacobian - Replace
pinocchio::frameJacobianbypinocchio::computeFrameJacobian - Replace
pinocchio::framesForwardKinematicsbypinocchio::updateFramePlacements - Replace
pinocchio::kineticEnergybypinocchio::computeKineticEnergy - Replace
pinocchio::potentialEnergybypinocchio::computePotentialEnergy - Replace
pinocchio::computeCentroidalDynamicsbypinocchio::computeCentroidalMomentumandpinocchio::computeCentroidalMomentumTimeVariation - Replace
pinocchio::centerOfMass(const ModelTpl&, DataTpl&, int, bool)bypinocchio::centerOfMass(const ModelTpl&, DataTpl&, KinematicLevel, bool) - Replace
pinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, int)bypinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, KinematicLevel) - Replace
pinocchio/algorithm/dynamics.hppbypinocchio/algorithm/constrained-dynamics.hpp - Change the order of arguments in some of
pinocchio::GeometryObject’s constructors - Deprecate
pinocchio/algorithm/parallel/geometry.hppmoved atpinocchio/collision/parallel/geometry.hpp - Deprecate
pinocchio/spatial/fcl-pinocchio-conversions.hppmoved atpinocchio/collision/fcl-pinocchio-conversions.hpp - Deprecate
pinocchio/parsers/sample-models.hppmoved atpinocchio/multibody/sample-models.hpp - Deprecate
pinocchio/math/cppad.hppmoved atpinocchio/autodiff/cppad.hpp - Deprecate
pinocchio/math/cppadcg.hppmoved atpinocchio/autodiff/cppadcg.hpp - Deprecate
pinocchio/math/casadi.hppmoved atpinocchio/autodiff/casadi.hpp - Deprecate
pinocchio::FrameTpl::parentreplaced bypinocchio::FrameTpl::parentJoint - Deprecate
pinocchio::FrameTpl::previousFramereplaced bypinocchio::FrameTpl::parentFrame - Deprecate
pinocchio/algorithm/contact-dynamics.hppalgorithms replaced bypinocchio/algorithm/constrained-dynamics.hpp
Python
- Replace
pinocchio.utils.skewbypinocchio.skew - Replace
pinocchio.utils.se3ToXYZQUATbypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.utils.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.robot_wrapper.RobotWrapper.frameClassicAccelerationbypinocchio.robot_wrapper.RobotWrapper.frameClassicalAcceleration - Replace
pinocchio.robot_wrapper.RobotWrapper.jointJacobianbypinocchio.robot_wrapper.RobotWrapper.computeJointJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.frameJacobianbypinocchio.robot_wrapper.RobotWrapper.computeFrameJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.initDisplaybypinocchio.robot_wrapper.RobotWrapper.initViewer - Replace
pinocchio.robot_wrapper.RobotWrapper.loadDisplayModelbypinocchio.robot_wrapper.RobotWrapper.loadViewerModel - Replace
pinocchio.deprecated.se3ToXYZQUATtuplebypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.deprecated.se3ToXYZQUATbypinocchio.SE3ToXYZQUAT - Replace
pinocchio.deprecated.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.deprecated.buildGeomFromUrdf(model, filename, [str])bypinocchio.buildGeomFromUrdf(model, filename, type, package_dirs, mesh_loader) - Replace
pinocchio.rpy.npToTTuplebypinocchio.utils.npToTTuple - Replace
pinocchio.rpy.npToTuplebypinocchio.utils.npToTuple - Replace
pinocchio.jacobianSubtreeCoMJacobianbypinocchio.jacobianSubtreeCenterOfMass
Removed
C++
- Remove
pinocchio::setGeometryMeshScales - Remove some
pinocchio::forwardDynamicssignatures - Remove some
pinocchio::impulseDynamicssignatures
Python
- Remove
pinocchio.utils.cross - Remove
pinocchio.robot_wrapper.RobotWrapper.initMeshcatDisplay - Remove
pinocchio.deprecated.setGeometryMeshScalesbypinocchio
2.7.1 - 2024-04-26
Changed
- Modify algorithm that appends a model to another (#2218)
- Set NOMINMAX as a public definitions on Windows (#2139)
- Improve documentation of
enum ReferenceFrame(#2190) - Improve documentation of
getJointJacobian(#2193).
Fixed
- CMake now uses Relative Path instead of Absolute (#2202)
- Order of frames in
ReducedModelis now the same as in the full model (#2160) - Remove a lot of warnings (#2139)
-
MeshcatVisualizerdoesn’t crash anymore when there is no collision model defined (#2147) - Fix MSVC build (#2155)
- Fix stub generation (#2166)
- Clean up empty documentation pages and sections (#2167)
- Fix SO(3) title and cross-section reference in the documentation (#2210)
Added
- Add
examples/floating-base-velocity-viewer.pyto visualize floating base velocity (#2143) - Add remark to the documentation of
getFrame(Classical)Accelerationfunctions (#2169) - Allow use of installed jrl-cmakemodules (#2216)
2.7.0 - 2024-01-23
Added
- Add
GeometryObject::meshMaterialattribute (#2084) - Add Parser for mujoco mjcf models
pinocchio::mjcf::buildModelandpinocchio::mjcf::buildGeom
Fixed
- Use bp::ssize_t for recent version of Windows compilers (#2102)
- Fix missing include for Boost >= 1.83 (#2103)
- Remove f-strings to fix install with python 2 (#2110)
- CMake: stop exporting CppAd/cppadcodegen & fetch submodule if not available (#2112)
- Fix malloc issue in CRBA algo (#2126)
- Fix build cppad and cppadcg with Boost < 1.77 (#2132)
2.6.21 - 2023-11-27
Added
- Add inverse dynamics (
rnea) Python and C++ example (#2083) - Add visualization of Frames in MeshCat viewer (#2098)
Fixed
- Re-initialize
Ycrb[0]incrbaMinimal(#2040) - Fix custom scalar use in
logfunction (#2047) - Raise exception on wrong input size in
XYZQUATToSE3Python binding function (#2073) - Remove memory leak in
buildGeomFromUrdfandbuildGeomFromUrdfStringPython binding functions (#2082https://github.com/stack-of-tasks/pinocchio/pull/2082) - Fix Panda3D viewer examples (#2087)
- Fix centroidal dynamics derivatives with respect to time (#2094))
Changed
- Rename freeflyer_joint to root_joint in
humanoidsample model (#2043) - CMake minimal version is now 3.10 (#2055)
- Split headers and sources in different directories to have a more standard C++ project (#2070)
Removed
- Remove support to
hpp-fcl< v2.0.0 (#2086)
2.6.20 - 2023-08-09
What’s Changed
- Fix support of recent versions of Boost for CppAD and CppADCodeGen by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2000
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 1e0c5aff1147d50d58bf4185a55ff564c9b6e027 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2007
- Enabled copy and deepcopy by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1882
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 9f963f67ebb889792175776c5ee00134d7bb569b by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2013
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2029
2.6.19 - 2023-06-19
What’s Changed
- Add Motion::toHomogeneousMatrix by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1946
- The insatiable English teacher PR 🧙 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1957
- require C++14 for Boost >= 1.81 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1949
- CMake: an example require python 3 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1966
- Fix IK example in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1963
- Issue templates by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1971
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1976
- Enhance CMake packaging for Windows by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1984
- Documentation by @drewhamiltonasdf in https://github.com/stack-of-tasks/pinocchio/pull/1986
- Add support for ccache on Conda build by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1987
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1988
- Enhance compatibility with new Python versions by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1996
New Contributors
- @drewhamiltonasdf made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1986
2.6.18 - 2023-04-29
What’s Changed
- Support force in pybind11 by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1868
- Fix some Python bindings signatures and add stub generation. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1869
- Fix IK example by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1875
- Remove empty examples by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1878
- build(deps): bump ros-industrial/industrial_ci from 6a8f546cbd31fbd5c9f77e3409265c8b39abc3d6 to 4b78602d67127a63dce62926769d9ec4e2ce72e4 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1890
- add static-contact-dynamics example by @PepMS in https://github.com/stack-of-tasks/pinocchio/pull/1891
- Update documentation of
JointModel.shortnamein python bindings by @Danfoa in https://github.com/stack-of-tasks/pinocchio/pull/1892 - update doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1898
- Document that joints need to be added in depth-first order by @traversaro in https://github.com/stack-of-tasks/pinocchio/pull/1899
- fix INSTALL_RPATH on ROS & OSX by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1908
- Python example: update joint placements after loading a URDF by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1911
- Remove more empty sections from the docs by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1912
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1914
- update doc for fixed joint by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1920
- doc: more information about frames on cheatsheet by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1930
- Define operational frames in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1929
- Remove support of np.matrix by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1941
- Fix other np.matrix issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1942
New Contributors
- @PepMS made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1891
- @Danfoa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1892
2.6.17 - 2023-02-15
What’s Changed
- Fix Jlog6 documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1857
- Add documentation to Jlog3 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1858
- [python/visualize] Extend visualizer features and implement them for MeshcatVisualizer by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1845
- Second-order RNEA derivatives by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1860
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1863
- Fix support of AVX2. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1865
2.6.16 - 2023-02-02
What’s Changed
- Enforce testing of Python bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1853
- Fix issue with Python 3.6 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1855
2.6.15 - 2023-01-31
What’s Changed
- More documentation for getJointJacobian by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1836
- Error when integrating SE3 with the same vector given as input and output by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1775
- Documentation for Jlog6 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1842
- remove useless header by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1846
- Fix issue with recent change on master branch for ROS-CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1847
- Fix issue with old version of Boost and eigenpy >= 2.9.0 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1851
2.6.14 - 2023-01-13
What’s Changed
- Fix registration of ptr to Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1832
2.6.13 - 2023-01-12
What’s Changed
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1790
- Skip collision pairs between geom on same joint in appendGeometryModel by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1791
- Fix issue with Boost 1.78 on OSX systems by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1792
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1793
- Add helper functions for computing supported inertia and force by frames by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1796
- Follow-up : Supported inertia by frame by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1797
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1799
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1801
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1802
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1809
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1811
- Fix Python issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1821
- Allow to use std::shared_ptr by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1822
2.6.12 - 2022-11-06
What’s Changed
- Elevate check for ambiguous input argument to an exception by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1781
- Fix packaging issues + sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1782
- Fix issue with clang by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1784
2.6.11 - 2022-10-25
What’s Changed
- URDF: fix loading relative mesh path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1748
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1750
- Add @note to difference documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1753
- Configuration limits for joints and model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1756
- Address remaining warnings + speed-up build for BUILD_TESTING=OFF by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1764
- Add status of ROS builds to README by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1770
- pinocchio/visualize: Add support for cone shape in meshcat dispaly by @whtqh in https://github.com/stack-of-tasks/pinocchio/pull/1769
- Updates README by @nikoandpiko in https://github.com/stack-of-tasks/pinocchio/pull/1776
- Enhance cmake packaging by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1777
New Contributors
- @stephane-caron made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1753
- @whtqh made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1769
- @nikoandpiko made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1776
2.6.10 - 2022-09-14
What’s Changed
- fix syntax for python 2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1734
- Expose
removeGeometryObjectin python binding by @Jiayuan-Gu in https://github.com/stack-of-tasks/pinocchio/pull/1736 - Fix relocalable by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1738
- Fix relative path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1742
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1744
New Contributors
- @Jiayuan-Gu made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1736
2.6.9 - 2022-08-12
What’s Changed
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1669
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1670
- Sync example-robot-data by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1671
- update to pybind11 v2.9.2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1674
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1678
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1677
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1679
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1692
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1691
- Fix bug in appendModel by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1693
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1695
- Fix geometry color default value by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1699
- Add python example appending Urdf and another model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1698
- SO3 diff impl use quaternion instead of rotation matrix by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1702
- add cheat sheet to doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1705
- cmake/utils: no need for python here by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1709
- Add header only target by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1712
- cmake: relocatable package for recent CMake versions by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1716
- cmake: modernize header-only lib by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1718
- ROS2/Colcon integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1719
- CMake: update to eigenpy 2.7.10 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1720
- Fix weird test failure on Conda by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1723
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1727
- ROS2 release support by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1681
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1732
New Contributors
- @fabinsch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1698
2.6.8 - 2022-06-06
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1648
- Fix integrate method for SO2 by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1652
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1653
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1658
- Extend current Coriolis computations to account for Cristoffel symbol of first kind by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1665
- Fix method play() of rviz_visualizer by @danielcostanzi18 in https://github.com/stack-of-tasks/pinocchio/pull/1667
- chore: Included githubactions in the dependabot config by @nathannaveen in https://github.com/stack-of-tasks/pinocchio/pull/1659
- Enable ubuntu 22.04 on CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1668
New Contributors
- @pre-commit-ci made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1648
- @Toefinder made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1652
- @danielcostanzi18 made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1667
- @nathannaveen made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1659
2.6.7 - 2022-05-03
What’s Changed
- add dummy .pre-commit-config.yaml by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1629
- Avoid triggering multi-line comment in Latex formula by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1630
- Make Pinocchio v2 compatible with HPP-FCL v2 by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1631
- Add example of collision with a point cloud by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1636
- follow up on hpp-fcl v2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1637
- Fix pickling for Boost >= 1.7.4 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1640
2.6.6 - 2022-03-22
What’s Changed
- Support HPP-FCL for ROS binaries & introduce ROS2 ament integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1622
2.6.5 - 2022-02-14
What’s Changed
- Fix warning issue in Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1546
- RVizVisualizer update by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1549
- Correct link to examples. Removed python subdirectory in the link as the directory does not exist anymore by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1561
- Add CONTRIBUTING.md file for newcomers by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1563
- Add list of projects based on Pinocchio by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1566
- Fix constrained dynamics formula by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1567
- Append “/share” to AMENT_PREFIX_PATH by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1568
- Expose dIntegrateTransport by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1572
- [timings] Reduce allocations in finite-difference baselines by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1583
- [computeAllTerms] Add missing noalias to avoid temporary allocation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1582
- Missing
noaliasby @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1585 - [multibody/model] add joint arg validation by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1586
- [multibody/geometry] Add method to remove an object. by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1588
- Fix bug in ABAChecker by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1599
- Update README.md by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1604
- allow
robot_wrapperto share data with itsvizby @vnghia in https://github.com/stack-of-tasks/pinocchio/pull/1606
New Contributors
- @duburcqa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1585
- @vnghia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1606
2.6.4 - 2021-11-02
What’s Changed
- Change ‘typedef’ to ‘using’, add curly braces by @the-raspberry-pi-guy in https://github.com/stack-of-tasks/pinocchio/pull/1476
- [CMake] set INSTALL_RPATH for python on linux by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1482
- [visualize] captureImage() method by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1480
- ci: update ROS CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1483
- Fix issue with Pool when FCL is missing by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1485
- fix module name by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1487
- Add RVizVisualizer by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1488
- fix reshape issues by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1489
- Remove useless reference to L-GPL + remove of useless files by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1500
- Update old function, remove mobile robot wrapper by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1490
- Allows the display of {COLLISION,VISUAL} in MeshCat by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1502
- Delete submodule travis by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1509
- Add citation by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1511
- badges: add PyPI by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1510
- Add support of Convex within MeshCat + improve GeometryObject bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1530
- [python] Fix BaseVisualizer constructor. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1533
- [python] Add pybind11 header. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1519
- make copy of supports during model cast by @rubengrandia in https://github.com/stack-of-tasks/pinocchio/pull/1536
- [python] Simplify buildGeomFromUrdf and allow to build from string. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1538
- Sync submodule by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1542
- Turn off automatic documentation generation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1541
New Contributors
- @the-raspberry-pi-guy made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1476
- @ManifoldFR made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1480
- @EtienneAr made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1488
- @kozakromch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1489
- @rubengrandia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1536
2.6.3 - 2021-07-27
This new release fixes bugs in MeshCat rendering, loading of ROS path and in the Centroidal dynamics derivatives
2.6.2 - 2021-07-05
This new release provides fixes include orders in the unit tests due to recent versions of Boost. It also provides more content to the Readme. This new release prefigures the new Pinocchio 3.x
2.6.1 - 2021-06-08
Enhancement:
- extended support of serialization of FCL primitives
- extended support of Boost.Variant in Python
Fixes:
- fix bug when loading URDF on Windows
- fix handling of Frame inertia
2.6.0 - 2021-04-11
This new release provides:
- improvement for handling collision/distance requests
- support of parallel computations for ABA, RNEA and collisions algorithms (more to come soon)
- additional features for the RobotWrapper in Python
- support of Capsule for Meshcat
- happened Inertia information to Frames
- fixes for doc issues
- improve numerical robustness when two inertias are Zero
2.5.6 - 2021-01-23
This new release comes with a more consistent ABA algorithm (data.a_gf used instead of classic data.a) and more outcomes for computeAllTerms. In addition, it provides some extended supports to PyPy.
2.5.5 - 2021-01-07
This maintenance release enhances the whole CMake packaging of the project and provides additional features for the Python bindings.
2.5.4 - 2020-11-26
This new release enhances the compatibility of Pinocchio with former distributions, provides better support to Euler angles and fixes some bugs.
2.5.3 - 2020-11-13
This new release fixes some issues with the Python bindings, add new examples and extend the whole tests.
2.5.2 - 2020-11-02
This new release enhances the compatibility with Windows, provides new tools eitheir to work on joint configurations and also to compute the kinematic regressors.
2.5.1 - 2020-10-12
This new release provides:
- improvements on the whole project coverage
- better support of Windows v142
- support of joint friction and damping (only at the interface level)
- new algorithm to retrieve the Coriolis matrix from RNEA/ABA derivatives
2.5.0 - 2020-08-31
In this new release, we have:
- a full memory shared in the Python bindings, i.e. that all the Eigen object can now be changed in Python.
- better handling of multiprecision arithmetic
- improved CMake packaging
- fix for Autodiff
2.4.7 - 2020-07-20
This new release provides:
- an extended API for dealing with Lie groups and the related computations (integration, difference, derivatives, etc.)
- the Lie groups have now their Python bindings for easy code prototyping
- the kinematics derivatives of the Frames have been introduced as well as the extension of current Joints derivatives
- the packaging of the project has been improved too.
2.4.6 - 2020-06-15
This new release of Pinocchio removes the use of pkg-config to check dependencies and provides a full compatibility and support for Windows systems.
2.4.5 - 2020-05-23
This new release extends the current frames algorithms to also consider the LOCAL_WORLD_ALIGNED reference frame. It also exposes the values of the enum_ for simplified usage.
2.4.4 - 2020-05-13
This new release provides:
- new helpers function to retrieve frame velocities and accelerations
- for each collision pair, it is now possible to provide specific collision checking settings
- support to display convex hulls in viewers
It also fixes:
- the support of Panda3d
and enhances the global CMake packaging of the project.
2.4.3 - 2020-04-24
This new release provides a new Viewer, named Panda3d, for easy code visualization in Python. It also provides additional fixes to the Code Generation support.
2.4.2 - 2020-04-21
This new release of Pinocchio provides new features for dealing with Lie groups:
- improved operations over the differential operations of the integrate function
- new functions for transporting some matrix between the two endpoints of the integrate function
- the RPY functions are now robust over singularities
- the support of autodiff frameworks has been improved to also cope with Lie groups features
This release also provides:
- a packaging fixe with respect to the URDFDOM dependency
- the Python bindings should now be without memory leak
2.4.1 - 2020-04-15
This new release fixes a bug introduced in Pinocchio 2.4.0 concerning the method ModelTpl::addFrame. This release also provides better support for the checking of the CppAD and CppADCodeGen versions.
2.4.0 - 2020-04-09
This new release of Pinocchio makes several improvements:
- improve compatibility with hpp-fcl
- improve compatibility with CppAD and notably the Lie algebra features
- a better CMake >= 3.0 export of the project
- new examples for Code generation
- improved Python bindings
- improved support for Boost.Multiprecision
- reduce the memory usage when compilation unit tests
and we have started to move some dependencies like urdfdom to the pinocchio.so library to avoid additional compilations issues and to useless compilations burden.
2.3.1 - 2020-02-20
This new release provides:
- some fixes with respect to minor bugs introduced in Pinocchio 2.3.0
- an enhance detection of Python
- improves the compilation memory overhead
2.3.0 - 2020-02-18
This new release provides:
- full compatibility with CMake export
- full compatibility with Numpy.Array
- examples for Code generation
- better support of C++11
- minor bug fixes
- improves coverage
- uniformizes function signature
- improves interoperability between Numpy and Pinocchio
- add many examples
- full integration of Python bindings of hpp-fcl
- supports the pickling and the serialization of Data
2.2.3 - 2019-12-30
This new release provides:
- pickling and serialization of Data structures
- provide new algorithms to create reduce models
It also improves the compatibility with the Transform used in HPP-FCL. It also fixes various bugs. It also comes with new and detailed examples.
2.2.2 - 2019-12-11
This new release:
- improves the compatibility with HPP-FCL bindings
- improves the documentation of the project with more examples
- fixes some bugs related to Eigen
- add new algorithms to compute the centroidal matrix and its time derivatives
2.2.1 - 2019-11-25
This new release fixes the ROS package version number and updates the robot models.
2.2.0 - 2019-11-25
This new release of Pinocchio introduces:
- analytical formula for Hessian of the kinematics
- derivatives of the difference operation
- new derivatives for static torque quantity
- new models for tests and examples.
It adds some signature non-exposed in Python. It also deletes outdated function signatures that have been deprecated in 2.0.x versions. It also improves the packaging with respect to ROS or other robotics frameworks.
2.1.11 - 2019-10-27
This release fixes missing update of the ROS package.xml file with the new version.
2.1.10 - 2019-10-25
This new release allows throwing when some input arguments are not fulfilled (useful feature in Python). It also provides new support for Hessian of the kinematics. Finally, the project is now packaged for ROS integration.
2.1.9 - 2019-10-09
This is a maintenance release, with some fixes concerning the contact dynamics, better support of LOCAL_WORLD_ALIGNED option and fixes with respect to some recent versions of CppADCodeGen.
2.1.8 - 2019-09-30
This is a maintenance release providing several fixes:
- remove memory allocation in ABA derivatives with contact forces
- better handling of boost::Variant
- better support of Majax
It also provides new features in the documentation of mathematical formula.
2.1.7 - 2019-09-10
This new release improves:
- the support of AutoDiff frameworks
- the efficiency of some core algorithms
fixes:
- the support of Majax
- the compatibility with Python 2/3
2.1.6 - 2019-08-05
This new release improves the packaging of the project and provides new algorithms to compute the Jacobians of the center of mass of each subtree.
2.1.5 - 2019-07-16
This new release provides support for JointMimic and JointRevoluteUnboundedUnaligned. It also comes with the full support of CasADi.
Thanks to @mkatliar for helping us to provide this support.
2.1.4 - 2019-06-22
This new release provides some fixes with respect to Python bindings, C++17 as well as new important features:
- dynamic regressor for identification
- add support of multiple viewers
- improve analytical derivatives
2.1.3 - 2019-04-30
This new release fixes some issues with Python 3 and C++17 standard. It also provides additional documentation, enlarges the current Python bindings and uniformizes naming convention in Python.
2.1.2 - 2019-04-05
This new release aims at fixing compilations issues when COLLISION module is activated. It also provides some fixes concerning the loading of meshes.
A new feature provided by this release concerns the possibility of appending two models together.
2.1.1 - 2019-03-27
This new release fixes compatibility bugs with previous release 2.1.0. It also provides a serialization interface for Spatial classes and the Model class.
2.1.0 - 2019-02-27
This new release makes some major improvements:
- it is now possible to use MeshCat, another viewer working in the browser directly in Python
- the Python bindings are now hardly tested and uniformized with respect to the C++ API
- this new release is compatible with recent releases of
hpp-fcl - the SRDF parsing has been improved. Its now possible to load several reference configuration vectors
We also fixed bugs related to recent versions of Boost mostly.
2.0.0 - 2019-01-11
Welcome Pinocchio 2.0.0.
This release makes official the last important and new features for efficiently computing the dynamics of the rigid body systems:
- Analytical derivatives
- Automatic differentiation
- Full scalar type overloading
- Code generation among others
1.3.3 - 2018-10-29
This is for real the last release before Pinocchio 2.0.0 and more.
This release fixes the packaging when hpp-fcl is missing. Thanks to @aelkhour for raising this issue.
1.3.2 - 2018-10-26
This release is the last one before Pinocchio 2.0.0.
It mostly:
- fixes issues introduced by new API of frame functionalities;
- introduces new sample models for manipulator and humanoid systems;
- fixes bugs due to boost 1.58.0;
- improve the readme with credits section.
1.3.1 - 2018-09-25
This new release corrects some bugs or bad deprecations concerning Pinocchio 1.3.0.
1.3.0 - 2018-08-28
This new release introduces analytical derivatives in the corpus of Pinocchio. This feature is still under development but can already be used both in C++ and Python.
This new release also fixes a bunch of bugs related to Eigen and Boost.
1.2.9 - 2018-06-01
This is mostly a maintenance release:
- Fix bug in. lower bounds in Model class
- Update documentation structure (additional work is needed)
- Improve the compatibility with Python 3.x
1.2.8 - 2018-05-18
This is mostly a maintenance release:
- Fix some bugs in JointModel{Translation,Spherical} for ABA algorithm
- Fix a duplication issue in RobotWrapper
- Improve compatibility with recent version of Boost >= 1.67.0
- Romeo is now loaded from the official romeo_description repository
1.2.7 - 2018-04-03
This is mostly a maintenance release:
- Fixes and computation improvements for Lie group operations.
- Adding pickle for spatial classes.
- Allow loading of URDF tree directly from an XML stream.
1.2.6 - 2018-01-15
This is mostly a maintenance release with various fixes to comply with Boost variadic macro on recent OS. It also adds new convention with a LOCAL and a WORLD frame to express Jacobian quantities.
1.2.5 - 2017-10-10
This a maintenance Release. We added some algo to compute the time variation of the Jacobians together with the variation with respect to time of the centroidal momemtum matrix. HPP-FCL works now with Eigen for linear algebra.
1.2.4 - 2017-06-09
This is mostly a maintenance release, with some fix with respect new urdfdom versions, it handles Eigen support with hpp-fcl.
1.2.3 - 2017-02-14
This release fixes some issues with respect to 1.2.1.
API modifications
Interpolate, Differentiate, Integrate are now algorithmic struct which can be efficiently overloaded.
Bindings
Add FCL object bindings
1.2.1 - 2016-10-17
Summary
This release is a minor patch of the previous release 1.2.0.
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New
- The Python bindings are aligned and free of unnecessary allocations
- Add documentation option which allows to not install the documentation
- Introduces container::aligned_vector to automatically create an std::vector with specific aligned allocator
API modifications
- Remove JointDense.
- Remove JointGeneric
Fixes
- Solves the parsing of geometries in URDF module
- Fixes alignment issues on 32 bits architecture
1.2.0 - 2016-09-29
Summary
The main modifications concern the update of the code to comply with the Humanoid Path Planner (HPP).
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Add Joint{Model,Data} classes based on Joint{Model,Data}Base and Joint{Model,Data}Variant. Those classes call directly the visitors and make Variant accessible throw methods
- Add partial Joint{Model,Data}Composite. They allow a stack of joints without adding any Inertia.
- Increase Frame class. Frames can be of several types (BODY, JOINT, SENSOR, etc) and reflect the robot tree as it appears in the URDF conventions. Frames have two attributes: parent which the direct Joint parent in the Joint tree, previousFrame which correspond to the parent Frame in the tree of Frames).
- Adding Python parser which is able to read models written in Python.
- Add algo checker to check the validity of a model.
- Improve documentation.
API modifications
- Model has some methods deprecated. The default name has been removed.
- The Geometry classes have been updated and several methods have been set to deprecated. They now use Frames as parent instead of Joint directly: a Geometry is now supported by a BODY.
- Add active collision pair flags in GeomData which define the active collision pairs.
- Unify naming conventions (nframes, njoints, etc).
Fixes
- The UDRF parser can now deal with more complex topologies. It properly handles the stack of geometries for each BODY.
- Improve packaging mainly around the Python part.
1.1.2 - 2016-05-31
Summary
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Added operational frames (that are a Plucker coordinate frame attached to a parent joint inside a kinematic tree). Position and Jacobian of such frames can be computed
- Geometry primitives can now be handled (and added to the Pinocchio GeometryModel) when encountered in an urdf file
- Implemented simple srdf parsing for GeometryData : parse the desactivated collision pairs
- Added Articulated Body Algorithm (ABA), and CCRBA
- When parsing a urdf file, now look in the environment variable ROS_PACKAGE_PATH for directories where to search for meshes. Users can provide hint directories to search in as a priority. Updated python RobotWrapper consequently
- Added forward dynamics with contact algorithm
- Added algorithms working with vectors of configuration or velocity(either on a JointModel or on a Model, iterating through all the kinematic tree)
- One can integrate a configuration at a constant velocity during a unit time
- One can differentiate two configurations (i.e compute the velocity that must be integrated during a unit time to go from first configuration to the other )
- One can interpolate between two configurations
- One cancompute the distance between two configurations ( such as dist = norm ( difference) )
- One can shoot a configuration uniformly sampled between specified limits
- Added Impulse Dynamic Algorithm
- Completed the list of method to access or call Joint’s data or method when joint are stored in a variant.
- Added JointAccessor that is a general joint encapsulating a JointVariant ( abstracting the use of visitors for the user).
API modifications
- Moved limits from joint models to Model as vectors of size nq for position limits and size nv for velocity and effort limits
- The Geometry objects stored in GeometryModel are now splitted in two types : visual and collision
Minor
- Improved documentation of Data, Model, Spatial Classes
- Improved efficiency when executing algorithms
- One can now create Inertia for simple shapes such as cylinders, boxes, ellipsoid
- Rework some unittests to increase to coverage of whole package ( C++ and Python )
Bugs Fixed
- Fixed operator Inertia x constraint in JointSphericalZYX
- Fixed the Dense conversion of joints (models and datas)
- Fixed bugs in JointRevoluteUnaligned and JointPrismaticUnaligned to access the access when visiting a variant containing such joints with boost::fusion
1.1.0 - 2016-02-04
Summary
New Features
- Spatial classes now follow the CRTP Design Pattern, for performance reasons.
- JointModels are now exposed in Python. This feature enables one to load a URDF model with a precise root joint and to create his/her own model.
- Python models can now be created by hand ( ex: buildEmptyModel() + calls to addBody() )
- Added utility tools to check an urdf model ( same as check_urdf but dislpay the Pinocchio model created from urdf parsing)
- Add unaligned prismatic joint
- Add geometry through Flexible Collision Library (hpp-fcl)
- Add dedicated structs to handle geometry. GeometryModel (list of geometry objects and its relation wrt kinematic model) and GeometryData
- When parsing urdf, meshes can be read from collada files and handled in Pinocchio
- Created parser that handles geometry and exposed it in python
- Add algorithms to update the geometry kinematics, to compute the distances for pairs of collision or if they are colliding or not.
- Added algorithms to compute the kinetic energy, the potential energy and exposed it in python
- The complete documentation is in progress
API modifications
- Change name of kinematics algorithms: now forwardKinematics instead of previous geometry, kinematics and dynamics.
Minor
- SimpleHumanoid is now built with joint limits
- Handle floating joints in urdf parsing
- Slight separation between joints and body in Model to avoid confusion
- Internally, Motion and Force classes now use a 6D-vector instead of two 3D-vectors for linear and angular part
Bugs Fixed
- Fixed a bug when trying to merge a link with its parent in case of fixed joint. Now merge only if it has an inertial tag.
- All the algorithms are now set to inline
- Fix compilation errors
Installation
The source of the release are available in the file pinocchio-1.1.0.tar.gz just below along with a binary version for 64-bits Debian architecture of Pinocchio **pinocchio_1.1.0amd64.deb** and its dependencies. For information, those packages will be installed in _/opt/openrobots directory.
1.0.2 - 2015-09-14
Summary
New Features
- The limits in position, velocity and torque for joints Revolute and Prismatic are now parsed from urdf model and accessible
- Implementation of exp and log functions on SE3 in C++ with its python binding thanks to @aelkhour
- Data now contains information relative to the center of mass position, velocity and acceleration
- Add Lua parser - compatible with RBDL
- Add translational joint
- Add planar joint
Minor
- Reduction of compilation warnings.
Bugs Fixed
- Fixed bug in operator Y*S in JointRevoluteUnaligned
1.0.0 - 2015-04-03
The following algorithms are implemented. • Recursive Newton-Euler algorithm (RNEA, i.e inverse dynamics) • Composite Rigid Body algorithm (CRBA, i.e generalized inertia matrix) • Sparse Cholesky decomposition of the inertia matrix (for constrained forward-dynamics resolution) • Placement Jacobians (i.e application from configuration velocities to end-effector spatial velocities), along with computation of body placements, velocities and accelerations. • Center of mass and its Jacobian
The model can either be parsed from a URDF format or be created by appendending bodies. The following joint models are implemented. • Revolute X, Y, Z (optimized) and unaligned with Cartesian directions • Prismatic X, Y, Z • Spherical (with and withoug singularities) • FreeFlyer (i.e. no constraint, for mobile robots like humanoids – using quaternion representation for the rotation) • Fixed (concatenation of two consecutive bodies)
Wiki Tutorials
Dependant Packages
| Name | Deps |
|---|---|
| kinematics_interface_pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged pinocchio at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.3.1 |
| License | BSD-2 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stack-of-tasks/pinocchio.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-01-13 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Justin Carpentier
- Wolfgang Merkt
Authors
![]()
![]()
![]()
![]()
Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone’s algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
Pinocchio was first tailored for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.). It is built upon Eigen for linear algebra and FCL for collision detection. Pinocchio comes with a Python interface for fast code prototyping, directly accessible through Conda.
Pinocchio is now at the heart of various robotics software as Crocoddyl, an open-source and efficient Differential Dynamic Programming solver for robotics, the Stack-of-Tasks, an open-source and versatile hierarchical controller framework or the Humanoid Path Planner, open-source software for Motion and Manipulation Planning.
If you want to learn more about Pinocchio internal behaviors and main features, we invite you to read the related paper and the online documentation.
If you want to dive into Pinocchio directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
Table of contents
- Table of contents
- Introducing Pinocchio 3
- Pinocchio main features
- Documentation
- Examples
- Tutorials
- Pinocchio continuous integrations
- Performances
- Ongoing developments
- Installation
- Visualization
- Citing Pinocchio
- Questions and Issues
- Credits
- Open-source projects relying on Pinocchio
- Acknowledgments
Introducing Pinocchio 3
Pinocchio3 is the latest major release of Pinocchio. It comes with multiple new features, such as:
- Sparse constrained dynamics and its analytical derivatives
- Full support of closed-loop mechanisms
- State-of-the-art frictional contact solvers
- Low-complexity constrained articulated body algorithms
- Full support of multiple-precision floating-point (MPFR) in Python and C++
- Full CasADi support in Python and C++
- Increased support of CppAD and CppADCodeGen
- New SDF and MJCF parsers
- and much more.
Pinocchio main features
Pinocchio is fast:
- C++ template library,
- cache friendly,
- automatic code generation support is available via CppADCodeGen.
Pinocchio is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- support multiple precision arithmetic via Boost.Multiprecision or any similar framework,
- computations of kinematic and dynamic regressors for system identification and more,
- and much more with the support of modern and open-source Automatic Differentiation frameworks like CppAD or CasADi.
Pinocchio is flexible:
- header only,
- C++ 98/03/11/14/17/20 compliant.
Pinocchio is extensible. Pinocchio is multi-thread friendly. Pinocchio is reliable and extensively tested (unit-tests, simulations, and real-world robotics applications). Pinocchio is supported and tested on Windows, Mac OS X, Unix, and Linux (see build status here).
Documentation
The online Pinocchio documentation of the last release is available here. A cheat sheet pdf with the main functions and algorithms can be found here.
Examples
In the examples directory, we provide some basic examples of using Pinocchio in Python. Additional examples introducing Pinocchio are also available in the documentation.
Tutorials
Pinocchio comes with a large bunch of tutorials aiming at introducing the basic tools for robot control. Tutorial and training documents are listed here. You can also consider the interactive Jupyter notebook set of tutorials developed by Nicolas Mansard and Yann de Mont-Marin.
Pinocchio continuous integrations
Pinocchio is constantly tested for several platforms and distributions, as reported below:
| CI on ROS | |
| CI on Linux via APT | |
| CI on OSX via Conda | |
| CI on Windows via Conda | |
| CI on Linux via Robotpkg | |
Performances
Pinocchio exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, Pinocchio can unroll most of the computations directly at compile time, allowing to achieve impressive performances for a large range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical paper. In addition, the introspection may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
Ongoing developments
If you want to follow the current developments, you can directly refer to the devel branch. The master branch only contains the latest release. Any new Pull Request should then be submitted on the devel branch.
Installation
Pinocchio can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the installation procedure.
Conda
You simply need this simple line:
conda install pinocchio -c conda-forge
ROS
Pinocchio is also deployed on ROS. You may follow its deployment status below.
If you’re interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA. Here, you can install Pinocchio using:
sudo apt install ros-$ROS_DISTRO-pinocchio
This installs Pinocchio with HPP-FCL support and with Python bindings. You can then use Pinocchio in your ROS packages by:
- Depending on Pinocchio in your
package.xmlconfig (<depend>pinocchio</depend>) - Including Pinocchio via CMake (
find_package(pinocchio REQUIRED)) and linking against Pinocchio (target_link_libraries(my_library pinocchio::pinocchio))
We include support and hooks to discover the package for both ROS 1 and ROS 2. Examples can be found at the following repositories:
Please note that we always advise including the pinocchio/fwd.hpp header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 1 | ROS 2 | |||
|---|---|---|---|---|
| Melodic | Foxy | |||
| Noetic | Galactic | |||
| Humble | ||||
| Rolling |
Visualization
Pinocchio provides support for many open-source and free visualizers:
- Gepetto Viewer: a C++ viewer based on OpenSceneGraph with Python bindings and Blender export. See here for a C++ example on mixing Pinocchio and Gepetto Viewer.
- Meshcat: supporting visualization in Python and which can be embedded inside any browser.
- Panda3d: supporting visualization in Python and which can be embedded inside any browser.
- RViz: supporting visualization in Python and which can interact with other ROS packages.
Many external viewers can also be integrated. For more information, see the example here.
Citing Pinocchio
To cite Pinocchio in your academic research, please consider citing the software paper and use the following BibTeX entry:
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
And the following one for the link to the GitHub codebase:
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
Citing specific algorithmic contributions
Pinocchio goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning and control. Pinocchio provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc. If you use these algorithms, please consider citing them in your research articles.
- Le Lidec, Q., Montaut, L. & Carpentier, J. (2024, July). From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach. In RSS 2024-Robotics: Science and Systems.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). GJK++: Leveraging Acceleration Methods for Faster Collision Detection. IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). Constrained Articulated Body Dynamics Algorithms. Under review.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). Differentiable collision detection: a randomized smoothing approach. In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2023). Contact models in robotics: a comparative analysis. Under review.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). Collision Detection Accelerated: An Optimization Perspective. In Robotics: Science and Systems (RSS 2O22).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). Proximal and sparse resolution of constrained dynamic equations. In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018).
Questions and Issues
Do you have a question or an issue? You may either directly open a new question or a new issue or, directly contact us via the mailing list pinocchio@inria.fr.
Credits
The following people have been involved in the development of Pinocchio and are warmly thanked for their contributions:
- Justin Carpentier (Inria): main developer and manager of the project
- Nicolas Mansard (LAAS-CNRS): initial project instructor
- Guilhem Saurel (LAAS-CNRS): continuous integration and deployment
- Joseph Mirabel (Eureka Robotics): Lie groups and hpp-fcl implementation
- Antonio El Khoury (Wandercraft): bug fixes
- Gabriele Buondono (LAAS-CNRS): features extension, bug fixes, and Python bindings
- Florian Valenza (Astek): core developments and hpp-fcl support
- Wolfgang Merkt (University of Oxford): ROS integration and support
- Rohan Budhiraja (LAAS-CNRS): features extension
- Loïc Estève (Inria): Conda integration and support
- Igor Kalevatykh (Inria): Panda3d viewer support
- Matthieu Vigne (Wandercraft): MeshCat viewer support
- Robin Strudel (Inria): features extension
- François Keith (CEA): Windows support
- Sarah El Kazdadi (Inria): multi-precision arithmetic support
- Nicolas Torres Alberto (Inria): features extension
- Etienne Arlaud (Inria): RViz viewer support
- Wilson Jallet (LAAS-CNRS/Inria): extension of Python bindings
- Fabian Schramm (Inria): core developper
- Shubham Singh (UT Austin): second-order inverse dynamics derivatives
- Stéphane Caron (Inria): core developper
- Joris Vaillant (Inria): core developer and manager of the project
- Sebastian Castro (The AI Institute): MeshCat viewer feature extension
- Lev Kozlov: Kinetic and potential energy regressors
- Megane Millan (Inria): Features extension and core developer
- Simeon Nedelchev: Pseudo inertia and Log-Cholesky parametrization
- Ajay Sathya (Inria): core developer
If you have participated in the development of Pinocchio, please add your name and contribution to this list.
Open-source projects relying on Pinocchio
- Crocoddyl: A software to realize model predictive control for complex robotics platforms.
- TSID: A software that implements a Task Space Inverse Dynamics QP.
- HPP: A SDK that implements motion planners for humanoids and other robots.
- Jiminy: A simulator based on Pinocchio.
- ocs2: A toolbox for Optimal Control for Switched Systems (OCS2)
- TriFingerSimulation: TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- Casadi_Kin_Dyn: IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- PyRoboPlan: An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- ProxSuite-NLP: A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- Aligator: A versatile and efficient framework for constrained trajectory optimization.
- Simple: The Simple Simulator: Simulation Made Simple.
- LoIK: Low-Complexity Inverse Kinematics.
Acknowledgments
The development of Pinocchio is actively supported by the Gepetto team @LAAS-CNRS and the Willow team @INRIA.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Add parsing meshes with vertices for MJCF format (#2537)
Fixed
- Fix mjcf Euler angle parsing: use xyz as a default value for eulerseq compiler option (#2526)
- Fix variable naming in Python (#2530)
- Fix aba explicit template instantiation (#2541)
- CMake: fix RPATH on macos (#2546)
- Fix aba explicit template instantiation (#2541)
- Fix mjcf parsing of keyframe qpos with newlines (#2535)
- Fix sites parsing for MJCF format (#2548)
3.3.1 - 2024-12-13
Added
- Add
pinocchio_python_parsertarget (#2475)
Fixed
- Fix mjcf parsing of armature and of the default tag in models (#2477)
- Fix undefined behavior when using the site attribute in mjcf (#2477)
- Fix the type of image paths when loading textures in the meshcat visualizer (#2478)
- Fix meshcat examples ([#2503])[https://github.com/stack-of-tasks/pinocchio/pull/2503]
- Fix
pinocchio-test-cpp-parallel-geometrywhen built with Coal (#2502) - Fix scaling support for meshcat (#2511)
Changed
- On GNU/Linux and macOS, hide all symbols by default (#2469)
- Build
pinocchio_defaultwith collision features (#2517)
3.3.0 - 2024-11-06
Added
- Default visualizer can be changed with
PINOCCHIO_VIEWERenvironment variable (#2419) - Add more Python and C++ examples related to inverse kinematics with 3d tasks (#2428)
- Add parsing of equality/connect tag for closed-loop chains for MJCF format (#2413)
- Add compatibility with NumPy 2
__array__API (#2436) - Added argument to let users decide of root joint name when parsing models (urdf, mjcf, sdf) (#2402)
- Allow use of
pathlib.Path | strfor paths in python bindings (#2431) - Add Pseudo inertia and Log-cholesky parametrization (#2296)
- Add Pixi support (#2459)
Fixed
- Fix linkage of Boost.Serialization on Windows (#2400)
- Fix mjcf parser appending of inertias at root joint (#2403)
- Fix unit tests with GCC 13.3 (#2406
- Fix class abstract error for Rviz viewer (#2425)
- Fix compilation issue with MSCV and C++17 (#2437)
- Fix
pinocchio-test-py-robot_wrapperwhen building with SDF and collision support (#2437) - Fix crash when calling
Inertia::FromDynamicParametersin Python with wrong vector size (#2296) - Fix
examples/cassie-simulation.pyandexamples/talos-simulation.py(#2443) - Fix build with CppAd 2024 (#2459)
- Fix
pinocchio-test-cpp-mjcfunittest with Boost 1.86 (#2459) - Fix
pinocchio-test-cpp-constraint-variantsuninitialized values (#2459) - Fix mixing library symbols between Pinocchio scalar bindings (#2459)
- Fix bug for get{Joint,Frame}JacobianTimeVariation (#2466)
Changed
- Modernize python code base with ruff (#2418)
- Does not create a root_joint frame from parsed models (urdf, mjcf and sdf) when no root joint is provided (#2402)
3.2.0 - 2024-08-27
Fixed
- Append pinocchio optional libraries into pkg-config file (#2322)
- Fixed support of DAE meshes with MeshCat (#2331)
- Fixed pointer casts in urdf parser (#2339)
- Remove CMake CMP0167 warnings (#2347)
- Fixed urdfdom in ROS packaging (#2341)
- Fixed overview-urdf cpp example (#2384)
- Fixed mjcf model without a base link parsing (#2386)
- Fixed talos-simulation.py, simulation-contact-dynamics.py and simulation-closed-kinematic-chains.py examples (#2392)
Added
- Add getMotionAxis method to helical, prismatic, revolute and ubounded revolute joint (#2315)
- Add initial compatiblity with coal (coal needs
-DCOAL_BACKWARD_COMPATIBILITY_WITH_HPP_FCL=ON) (#2323) - Add compatibility with jrl-cmakemodules workspace (#2333)
- Add
collision_colorparameter toMeshcatVisualizer.loadViewerModel(#2350) - Add
BuildFromMJCFfunction to RobotWrapper (#2363) - Add more CasADi examples (#2388)
Removed
- Remove deprecated headers related to joint constraints (#2382)
Changed
- Use eigenpy to expose
GeometryObject::meshMaterialvariant (#2315) - GepettoViewer is no more the default viewer for RobotWrapper (#2331)
- Modernize python code base with ruff (#2367)
- Restructure CppAD and CasADi examples (#2388)
- Enhance and fix CppAD benchmarks outputs (#2393)
3.1.0 - 2024-07-04
Fixed
- Fix
appendModelwhen joints after the base are in parallel (#2295) - Fix
appendModelbuild when called with template arguments different than the ones fromcontext(#2284) - Fix
TransformRevoleTpl::rotationandTransformHelicalTpl::rotationbuild (#2284) - Fix compilation issue for Boost 1.85 (#2255)
- Fix python bindings of
contactInverseDynamics(#2263) - Deactivate
BUILD_WITH_LIBPYTHONwhen building with PyPy (#2274) - Fix Python bindings cross building with
hpp-fcl(#2288) - Fix build issue on Windows when a deprecated header is included (#2292)
- Fix build issue on Windows when building in Debug mode (#2292)
- Fix visualization of meshes in meshcat (#2294)
- Fix Anymal simulation test (#2299)
- Fix contact derivatives and impulse dynamics tests (#2300)
- Fix CMake compatibility with old console_bridge version (#2312)
Added
- Python unittest for
contactInverseDynamicsfunction (#2263) - Added helper functions to return operation count of CasADi functions. (#2275)
- C++ and Python unittest for
dIntegrateTransportto check vector transport and its inverse (#2273) - Add kinetic and potential energy regressors (#2282)
Removed
- Remove header
list.hppinclude for bindings of model and rnea (#2263)
3.0.0 - 2024-05-27
Added
Automatic differentiation
- Full support of Casadi in the main library by @jcarpent and @ManifoldFR
- Full support of Casadi for Python bindings by @jcarpent
- Full support of Boost.Multiprecision in the main library by @jcarpent
- Full support of Boost.Multiprecision for Python bindings by @jcarpent
- Full support of CppAD and CppADCodeGen in the main library by @jcarpent
- Full support of CppAD and CppADCodeGen for Python bindings by @jcarpent and @proyan
Core features
- Full support of constrained dynamical systems by @jcarpent
- Full support of derivatives of constrained dynamical systems by @jcarpent and @proyan
- Extended algorithms for constrained dynamics: constrained ABA, PV solvers, etc. by @jcarpent and @AjSat
- Add frictional contact solvers (PGS, ADMM) by @jcarpent
- Add contact inverse dynamics by @quentinll
- Full support of broadphase algorithms in Pinocchio by @jcarpent
- New joint supports (Helicoidal, Universal) by @fabinsch and @MegMll
- Add new algorithms for supporting Delassus factorizations for sparse, dense and tree-based systems by @jcarpent
- Add full OpenMP support for many algorithms (ABA, RNEA, collision detection, etc.) by @jcarpent
- Full support of GeometryModel, GeometryObject serialization by @jcarpent
- Extended support of Meshcat by @jcarpent, @ManifoldFR and @jorisv
- Extended testing and support of Lie groups operations by @jcarpent and @ManifoldFR
- Full support of AVX512 and AVX2 vectorization for Python bindings by @jcarpent
- Full support of the robot armature in RNEA, CRBA and ABA
- Extended formulation of CRBA and ABA using WORLD convention for reduced computational burden in the derivative algorithms
Parsers
Extra Algorithms
- Added reachable workspace computation and vizualisation in collaboration with @askuric based on pycapacity by @MegMll and @jorisv
Packaging
- Full support of template instantiation by @fabinsch and @jorisv
- Enhance support for Windows-based systems by @jorisv
- Splitting of the Pinocchio into sub-library for isolation by @jorisv
Compatibility
- Add
PINOCCHIO_ENABLE_COMPATIBILITY_WITH_VERSION_2define to activate compatibility with Pinocchio 2 API
Changed
C++
- Change minimum required version of C++ to C++11. Check for compatibility here: https://en.cppreference.com/w/cpp/compiler_support/11
- Replace
pinocchio::BiasZeroTplbypinocchio::MotionZeroTpl - Replace
pinocchio::fusion::JointVisitorBasebypinocchio::fusion::JointUnaryVisitorBase - Replace
pinocchio::fusion::push_frontbypinocchio::fusion::append - Replace
pinocchio::regressor::computeStaticRegressorbypinocchio::computeStaticRegressor - Replace
pinocchio::jointJacobianbypinocchio::computeJointJacobian - Replace
pinocchio::frameJacobianbypinocchio::computeFrameJacobian - Replace
pinocchio::framesForwardKinematicsbypinocchio::updateFramePlacements - Replace
pinocchio::kineticEnergybypinocchio::computeKineticEnergy - Replace
pinocchio::potentialEnergybypinocchio::computePotentialEnergy - Replace
pinocchio::computeCentroidalDynamicsbypinocchio::computeCentroidalMomentumandpinocchio::computeCentroidalMomentumTimeVariation - Replace
pinocchio::centerOfMass(const ModelTpl&, DataTpl&, int, bool)bypinocchio::centerOfMass(const ModelTpl&, DataTpl&, KinematicLevel, bool) - Replace
pinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, int)bypinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, KinematicLevel) - Replace
pinocchio/algorithm/dynamics.hppbypinocchio/algorithm/constrained-dynamics.hpp - Change the order of arguments in some of
pinocchio::GeometryObject’s constructors - Deprecate
pinocchio/algorithm/parallel/geometry.hppmoved atpinocchio/collision/parallel/geometry.hpp - Deprecate
pinocchio/spatial/fcl-pinocchio-conversions.hppmoved atpinocchio/collision/fcl-pinocchio-conversions.hpp - Deprecate
pinocchio/parsers/sample-models.hppmoved atpinocchio/multibody/sample-models.hpp - Deprecate
pinocchio/math/cppad.hppmoved atpinocchio/autodiff/cppad.hpp - Deprecate
pinocchio/math/cppadcg.hppmoved atpinocchio/autodiff/cppadcg.hpp - Deprecate
pinocchio/math/casadi.hppmoved atpinocchio/autodiff/casadi.hpp - Deprecate
pinocchio::FrameTpl::parentreplaced bypinocchio::FrameTpl::parentJoint - Deprecate
pinocchio::FrameTpl::previousFramereplaced bypinocchio::FrameTpl::parentFrame - Deprecate
pinocchio/algorithm/contact-dynamics.hppalgorithms replaced bypinocchio/algorithm/constrained-dynamics.hpp
Python
- Replace
pinocchio.utils.skewbypinocchio.skew - Replace
pinocchio.utils.se3ToXYZQUATbypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.utils.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.robot_wrapper.RobotWrapper.frameClassicAccelerationbypinocchio.robot_wrapper.RobotWrapper.frameClassicalAcceleration - Replace
pinocchio.robot_wrapper.RobotWrapper.jointJacobianbypinocchio.robot_wrapper.RobotWrapper.computeJointJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.frameJacobianbypinocchio.robot_wrapper.RobotWrapper.computeFrameJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.initDisplaybypinocchio.robot_wrapper.RobotWrapper.initViewer - Replace
pinocchio.robot_wrapper.RobotWrapper.loadDisplayModelbypinocchio.robot_wrapper.RobotWrapper.loadViewerModel - Replace
pinocchio.deprecated.se3ToXYZQUATtuplebypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.deprecated.se3ToXYZQUATbypinocchio.SE3ToXYZQUAT - Replace
pinocchio.deprecated.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.deprecated.buildGeomFromUrdf(model, filename, [str])bypinocchio.buildGeomFromUrdf(model, filename, type, package_dirs, mesh_loader) - Replace
pinocchio.rpy.npToTTuplebypinocchio.utils.npToTTuple - Replace
pinocchio.rpy.npToTuplebypinocchio.utils.npToTuple - Replace
pinocchio.jacobianSubtreeCoMJacobianbypinocchio.jacobianSubtreeCenterOfMass
Removed
C++
- Remove
pinocchio::setGeometryMeshScales - Remove some
pinocchio::forwardDynamicssignatures - Remove some
pinocchio::impulseDynamicssignatures
Python
- Remove
pinocchio.utils.cross - Remove
pinocchio.robot_wrapper.RobotWrapper.initMeshcatDisplay - Remove
pinocchio.deprecated.setGeometryMeshScalesbypinocchio
2.7.1 - 2024-04-26
Changed
- Modify algorithm that appends a model to another (#2218)
- Set NOMINMAX as a public definitions on Windows (#2139)
- Improve documentation of
enum ReferenceFrame(#2190) - Improve documentation of
getJointJacobian(#2193).
Fixed
- CMake now uses Relative Path instead of Absolute (#2202)
- Order of frames in
ReducedModelis now the same as in the full model (#2160) - Remove a lot of warnings (#2139)
-
MeshcatVisualizerdoesn’t crash anymore when there is no collision model defined (#2147) - Fix MSVC build (#2155)
- Fix stub generation (#2166)
- Clean up empty documentation pages and sections (#2167)
- Fix SO(3) title and cross-section reference in the documentation (#2210)
Added
- Add
examples/floating-base-velocity-viewer.pyto visualize floating base velocity (#2143) - Add remark to the documentation of
getFrame(Classical)Accelerationfunctions (#2169) - Allow use of installed jrl-cmakemodules (#2216)
2.7.0 - 2024-01-23
Added
- Add
GeometryObject::meshMaterialattribute (#2084) - Add Parser for mujoco mjcf models
pinocchio::mjcf::buildModelandpinocchio::mjcf::buildGeom
Fixed
- Use bp::ssize_t for recent version of Windows compilers (#2102)
- Fix missing include for Boost >= 1.83 (#2103)
- Remove f-strings to fix install with python 2 (#2110)
- CMake: stop exporting CppAd/cppadcodegen & fetch submodule if not available (#2112)
- Fix malloc issue in CRBA algo (#2126)
- Fix build cppad and cppadcg with Boost < 1.77 (#2132)
2.6.21 - 2023-11-27
Added
- Add inverse dynamics (
rnea) Python and C++ example (#2083) - Add visualization of Frames in MeshCat viewer (#2098)
Fixed
- Re-initialize
Ycrb[0]incrbaMinimal(#2040) - Fix custom scalar use in
logfunction (#2047) - Raise exception on wrong input size in
XYZQUATToSE3Python binding function (#2073) - Remove memory leak in
buildGeomFromUrdfandbuildGeomFromUrdfStringPython binding functions (#2082https://github.com/stack-of-tasks/pinocchio/pull/2082) - Fix Panda3D viewer examples (#2087)
- Fix centroidal dynamics derivatives with respect to time (#2094))
Changed
- Rename freeflyer_joint to root_joint in
humanoidsample model (#2043) - CMake minimal version is now 3.10 (#2055)
- Split headers and sources in different directories to have a more standard C++ project (#2070)
Removed
- Remove support to
hpp-fcl< v2.0.0 (#2086)
2.6.20 - 2023-08-09
What’s Changed
- Fix support of recent versions of Boost for CppAD and CppADCodeGen by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2000
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 1e0c5aff1147d50d58bf4185a55ff564c9b6e027 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2007
- Enabled copy and deepcopy by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1882
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 9f963f67ebb889792175776c5ee00134d7bb569b by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2013
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2029
2.6.19 - 2023-06-19
What’s Changed
- Add Motion::toHomogeneousMatrix by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1946
- The insatiable English teacher PR 🧙 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1957
- require C++14 for Boost >= 1.81 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1949
- CMake: an example require python 3 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1966
- Fix IK example in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1963
- Issue templates by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1971
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1976
- Enhance CMake packaging for Windows by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1984
- Documentation by @drewhamiltonasdf in https://github.com/stack-of-tasks/pinocchio/pull/1986
- Add support for ccache on Conda build by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1987
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1988
- Enhance compatibility with new Python versions by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1996
New Contributors
- @drewhamiltonasdf made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1986
2.6.18 - 2023-04-29
What’s Changed
- Support force in pybind11 by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1868
- Fix some Python bindings signatures and add stub generation. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1869
- Fix IK example by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1875
- Remove empty examples by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1878
- build(deps): bump ros-industrial/industrial_ci from 6a8f546cbd31fbd5c9f77e3409265c8b39abc3d6 to 4b78602d67127a63dce62926769d9ec4e2ce72e4 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1890
- add static-contact-dynamics example by @PepMS in https://github.com/stack-of-tasks/pinocchio/pull/1891
- Update documentation of
JointModel.shortnamein python bindings by @Danfoa in https://github.com/stack-of-tasks/pinocchio/pull/1892 - update doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1898
- Document that joints need to be added in depth-first order by @traversaro in https://github.com/stack-of-tasks/pinocchio/pull/1899
- fix INSTALL_RPATH on ROS & OSX by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1908
- Python example: update joint placements after loading a URDF by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1911
- Remove more empty sections from the docs by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1912
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1914
- update doc for fixed joint by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1920
- doc: more information about frames on cheatsheet by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1930
- Define operational frames in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1929
- Remove support of np.matrix by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1941
- Fix other np.matrix issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1942
New Contributors
- @PepMS made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1891
- @Danfoa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1892
2.6.17 - 2023-02-15
What’s Changed
- Fix Jlog6 documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1857
- Add documentation to Jlog3 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1858
- [python/visualize] Extend visualizer features and implement them for MeshcatVisualizer by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1845
- Second-order RNEA derivatives by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1860
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1863
- Fix support of AVX2. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1865
2.6.16 - 2023-02-02
What’s Changed
- Enforce testing of Python bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1853
- Fix issue with Python 3.6 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1855
2.6.15 - 2023-01-31
What’s Changed
- More documentation for getJointJacobian by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1836
- Error when integrating SE3 with the same vector given as input and output by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1775
- Documentation for Jlog6 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1842
- remove useless header by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1846
- Fix issue with recent change on master branch for ROS-CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1847
- Fix issue with old version of Boost and eigenpy >= 2.9.0 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1851
2.6.14 - 2023-01-13
What’s Changed
- Fix registration of ptr to Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1832
2.6.13 - 2023-01-12
What’s Changed
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1790
- Skip collision pairs between geom on same joint in appendGeometryModel by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1791
- Fix issue with Boost 1.78 on OSX systems by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1792
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1793
- Add helper functions for computing supported inertia and force by frames by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1796
- Follow-up : Supported inertia by frame by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1797
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1799
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1801
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1802
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1809
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1811
- Fix Python issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1821
- Allow to use std::shared_ptr by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1822
2.6.12 - 2022-11-06
What’s Changed
- Elevate check for ambiguous input argument to an exception by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1781
- Fix packaging issues + sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1782
- Fix issue with clang by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1784
2.6.11 - 2022-10-25
What’s Changed
- URDF: fix loading relative mesh path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1748
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1750
- Add @note to difference documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1753
- Configuration limits for joints and model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1756
- Address remaining warnings + speed-up build for BUILD_TESTING=OFF by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1764
- Add status of ROS builds to README by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1770
- pinocchio/visualize: Add support for cone shape in meshcat dispaly by @whtqh in https://github.com/stack-of-tasks/pinocchio/pull/1769
- Updates README by @nikoandpiko in https://github.com/stack-of-tasks/pinocchio/pull/1776
- Enhance cmake packaging by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1777
New Contributors
- @stephane-caron made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1753
- @whtqh made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1769
- @nikoandpiko made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1776
2.6.10 - 2022-09-14
What’s Changed
- fix syntax for python 2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1734
- Expose
removeGeometryObjectin python binding by @Jiayuan-Gu in https://github.com/stack-of-tasks/pinocchio/pull/1736 - Fix relocalable by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1738
- Fix relative path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1742
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1744
New Contributors
- @Jiayuan-Gu made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1736
2.6.9 - 2022-08-12
What’s Changed
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1669
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1670
- Sync example-robot-data by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1671
- update to pybind11 v2.9.2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1674
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1678
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1677
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1679
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1692
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1691
- Fix bug in appendModel by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1693
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1695
- Fix geometry color default value by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1699
- Add python example appending Urdf and another model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1698
- SO3 diff impl use quaternion instead of rotation matrix by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1702
- add cheat sheet to doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1705
- cmake/utils: no need for python here by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1709
- Add header only target by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1712
- cmake: relocatable package for recent CMake versions by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1716
- cmake: modernize header-only lib by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1718
- ROS2/Colcon integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1719
- CMake: update to eigenpy 2.7.10 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1720
- Fix weird test failure on Conda by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1723
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1727
- ROS2 release support by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1681
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1732
New Contributors
- @fabinsch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1698
2.6.8 - 2022-06-06
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1648
- Fix integrate method for SO2 by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1652
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1653
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1658
- Extend current Coriolis computations to account for Cristoffel symbol of first kind by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1665
- Fix method play() of rviz_visualizer by @danielcostanzi18 in https://github.com/stack-of-tasks/pinocchio/pull/1667
- chore: Included githubactions in the dependabot config by @nathannaveen in https://github.com/stack-of-tasks/pinocchio/pull/1659
- Enable ubuntu 22.04 on CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1668
New Contributors
- @pre-commit-ci made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1648
- @Toefinder made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1652
- @danielcostanzi18 made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1667
- @nathannaveen made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1659
2.6.7 - 2022-05-03
What’s Changed
- add dummy .pre-commit-config.yaml by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1629
- Avoid triggering multi-line comment in Latex formula by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1630
- Make Pinocchio v2 compatible with HPP-FCL v2 by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1631
- Add example of collision with a point cloud by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1636
- follow up on hpp-fcl v2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1637
- Fix pickling for Boost >= 1.7.4 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1640
2.6.6 - 2022-03-22
What’s Changed
- Support HPP-FCL for ROS binaries & introduce ROS2 ament integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1622
2.6.5 - 2022-02-14
What’s Changed
- Fix warning issue in Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1546
- RVizVisualizer update by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1549
- Correct link to examples. Removed python subdirectory in the link as the directory does not exist anymore by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1561
- Add CONTRIBUTING.md file for newcomers by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1563
- Add list of projects based on Pinocchio by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1566
- Fix constrained dynamics formula by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1567
- Append “/share” to AMENT_PREFIX_PATH by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1568
- Expose dIntegrateTransport by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1572
- [timings] Reduce allocations in finite-difference baselines by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1583
- [computeAllTerms] Add missing noalias to avoid temporary allocation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1582
- Missing
noaliasby @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1585 - [multibody/model] add joint arg validation by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1586
- [multibody/geometry] Add method to remove an object. by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1588
- Fix bug in ABAChecker by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1599
- Update README.md by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1604
- allow
robot_wrapperto share data with itsvizby @vnghia in https://github.com/stack-of-tasks/pinocchio/pull/1606
New Contributors
- @duburcqa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1585
- @vnghia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1606
2.6.4 - 2021-11-02
What’s Changed
- Change ‘typedef’ to ‘using’, add curly braces by @the-raspberry-pi-guy in https://github.com/stack-of-tasks/pinocchio/pull/1476
- [CMake] set INSTALL_RPATH for python on linux by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1482
- [visualize] captureImage() method by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1480
- ci: update ROS CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1483
- Fix issue with Pool when FCL is missing by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1485
- fix module name by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1487
- Add RVizVisualizer by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1488
- fix reshape issues by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1489
- Remove useless reference to L-GPL + remove of useless files by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1500
- Update old function, remove mobile robot wrapper by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1490
- Allows the display of {COLLISION,VISUAL} in MeshCat by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1502
- Delete submodule travis by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1509
- Add citation by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1511
- badges: add PyPI by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1510
- Add support of Convex within MeshCat + improve GeometryObject bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1530
- [python] Fix BaseVisualizer constructor. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1533
- [python] Add pybind11 header. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1519
- make copy of supports during model cast by @rubengrandia in https://github.com/stack-of-tasks/pinocchio/pull/1536
- [python] Simplify buildGeomFromUrdf and allow to build from string. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1538
- Sync submodule by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1542
- Turn off automatic documentation generation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1541
New Contributors
- @the-raspberry-pi-guy made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1476
- @ManifoldFR made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1480
- @EtienneAr made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1488
- @kozakromch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1489
- @rubengrandia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1536
2.6.3 - 2021-07-27
This new release fixes bugs in MeshCat rendering, loading of ROS path and in the Centroidal dynamics derivatives
2.6.2 - 2021-07-05
This new release provides fixes include orders in the unit tests due to recent versions of Boost. It also provides more content to the Readme. This new release prefigures the new Pinocchio 3.x
2.6.1 - 2021-06-08
Enhancement:
- extended support of serialization of FCL primitives
- extended support of Boost.Variant in Python
Fixes:
- fix bug when loading URDF on Windows
- fix handling of Frame inertia
2.6.0 - 2021-04-11
This new release provides:
- improvement for handling collision/distance requests
- support of parallel computations for ABA, RNEA and collisions algorithms (more to come soon)
- additional features for the RobotWrapper in Python
- support of Capsule for Meshcat
- happened Inertia information to Frames
- fixes for doc issues
- improve numerical robustness when two inertias are Zero
2.5.6 - 2021-01-23
This new release comes with a more consistent ABA algorithm (data.a_gf used instead of classic data.a) and more outcomes for computeAllTerms. In addition, it provides some extended supports to PyPy.
2.5.5 - 2021-01-07
This maintenance release enhances the whole CMake packaging of the project and provides additional features for the Python bindings.
2.5.4 - 2020-11-26
This new release enhances the compatibility of Pinocchio with former distributions, provides better support to Euler angles and fixes some bugs.
2.5.3 - 2020-11-13
This new release fixes some issues with the Python bindings, add new examples and extend the whole tests.
2.5.2 - 2020-11-02
This new release enhances the compatibility with Windows, provides new tools eitheir to work on joint configurations and also to compute the kinematic regressors.
2.5.1 - 2020-10-12
This new release provides:
- improvements on the whole project coverage
- better support of Windows v142
- support of joint friction and damping (only at the interface level)
- new algorithm to retrieve the Coriolis matrix from RNEA/ABA derivatives
2.5.0 - 2020-08-31
In this new release, we have:
- a full memory shared in the Python bindings, i.e. that all the Eigen object can now be changed in Python.
- better handling of multiprecision arithmetic
- improved CMake packaging
- fix for Autodiff
2.4.7 - 2020-07-20
This new release provides:
- an extended API for dealing with Lie groups and the related computations (integration, difference, derivatives, etc.)
- the Lie groups have now their Python bindings for easy code prototyping
- the kinematics derivatives of the Frames have been introduced as well as the extension of current Joints derivatives
- the packaging of the project has been improved too.
2.4.6 - 2020-06-15
This new release of Pinocchio removes the use of pkg-config to check dependencies and provides a full compatibility and support for Windows systems.
2.4.5 - 2020-05-23
This new release extends the current frames algorithms to also consider the LOCAL_WORLD_ALIGNED reference frame. It also exposes the values of the enum_ for simplified usage.
2.4.4 - 2020-05-13
This new release provides:
- new helpers function to retrieve frame velocities and accelerations
- for each collision pair, it is now possible to provide specific collision checking settings
- support to display convex hulls in viewers
It also fixes:
- the support of Panda3d
and enhances the global CMake packaging of the project.
2.4.3 - 2020-04-24
This new release provides a new Viewer, named Panda3d, for easy code visualization in Python. It also provides additional fixes to the Code Generation support.
2.4.2 - 2020-04-21
This new release of Pinocchio provides new features for dealing with Lie groups:
- improved operations over the differential operations of the integrate function
- new functions for transporting some matrix between the two endpoints of the integrate function
- the RPY functions are now robust over singularities
- the support of autodiff frameworks has been improved to also cope with Lie groups features
This release also provides:
- a packaging fixe with respect to the URDFDOM dependency
- the Python bindings should now be without memory leak
2.4.1 - 2020-04-15
This new release fixes a bug introduced in Pinocchio 2.4.0 concerning the method ModelTpl::addFrame. This release also provides better support for the checking of the CppAD and CppADCodeGen versions.
2.4.0 - 2020-04-09
This new release of Pinocchio makes several improvements:
- improve compatibility with hpp-fcl
- improve compatibility with CppAD and notably the Lie algebra features
- a better CMake >= 3.0 export of the project
- new examples for Code generation
- improved Python bindings
- improved support for Boost.Multiprecision
- reduce the memory usage when compilation unit tests
and we have started to move some dependencies like urdfdom to the pinocchio.so library to avoid additional compilations issues and to useless compilations burden.
2.3.1 - 2020-02-20
This new release provides:
- some fixes with respect to minor bugs introduced in Pinocchio 2.3.0
- an enhance detection of Python
- improves the compilation memory overhead
2.3.0 - 2020-02-18
This new release provides:
- full compatibility with CMake export
- full compatibility with Numpy.Array
- examples for Code generation
- better support of C++11
- minor bug fixes
- improves coverage
- uniformizes function signature
- improves interoperability between Numpy and Pinocchio
- add many examples
- full integration of Python bindings of hpp-fcl
- supports the pickling and the serialization of Data
2.2.3 - 2019-12-30
This new release provides:
- pickling and serialization of Data structures
- provide new algorithms to create reduce models
It also improves the compatibility with the Transform used in HPP-FCL. It also fixes various bugs. It also comes with new and detailed examples.
2.2.2 - 2019-12-11
This new release:
- improves the compatibility with HPP-FCL bindings
- improves the documentation of the project with more examples
- fixes some bugs related to Eigen
- add new algorithms to compute the centroidal matrix and its time derivatives
2.2.1 - 2019-11-25
This new release fixes the ROS package version number and updates the robot models.
2.2.0 - 2019-11-25
This new release of Pinocchio introduces:
- analytical formula for Hessian of the kinematics
- derivatives of the difference operation
- new derivatives for static torque quantity
- new models for tests and examples.
It adds some signature non-exposed in Python. It also deletes outdated function signatures that have been deprecated in 2.0.x versions. It also improves the packaging with respect to ROS or other robotics frameworks.
2.1.11 - 2019-10-27
This release fixes missing update of the ROS package.xml file with the new version.
2.1.10 - 2019-10-25
This new release allows throwing when some input arguments are not fulfilled (useful feature in Python). It also provides new support for Hessian of the kinematics. Finally, the project is now packaged for ROS integration.
2.1.9 - 2019-10-09
This is a maintenance release, with some fixes concerning the contact dynamics, better support of LOCAL_WORLD_ALIGNED option and fixes with respect to some recent versions of CppADCodeGen.
2.1.8 - 2019-09-30
This is a maintenance release providing several fixes:
- remove memory allocation in ABA derivatives with contact forces
- better handling of boost::Variant
- better support of Majax
It also provides new features in the documentation of mathematical formula.
2.1.7 - 2019-09-10
This new release improves:
- the support of AutoDiff frameworks
- the efficiency of some core algorithms
fixes:
- the support of Majax
- the compatibility with Python 2/3
2.1.6 - 2019-08-05
This new release improves the packaging of the project and provides new algorithms to compute the Jacobians of the center of mass of each subtree.
2.1.5 - 2019-07-16
This new release provides support for JointMimic and JointRevoluteUnboundedUnaligned. It also comes with the full support of CasADi.
Thanks to @mkatliar for helping us to provide this support.
2.1.4 - 2019-06-22
This new release provides some fixes with respect to Python bindings, C++17 as well as new important features:
- dynamic regressor for identification
- add support of multiple viewers
- improve analytical derivatives
2.1.3 - 2019-04-30
This new release fixes some issues with Python 3 and C++17 standard. It also provides additional documentation, enlarges the current Python bindings and uniformizes naming convention in Python.
2.1.2 - 2019-04-05
This new release aims at fixing compilations issues when COLLISION module is activated. It also provides some fixes concerning the loading of meshes.
A new feature provided by this release concerns the possibility of appending two models together.
2.1.1 - 2019-03-27
This new release fixes compatibility bugs with previous release 2.1.0. It also provides a serialization interface for Spatial classes and the Model class.
2.1.0 - 2019-02-27
This new release makes some major improvements:
- it is now possible to use MeshCat, another viewer working in the browser directly in Python
- the Python bindings are now hardly tested and uniformized with respect to the C++ API
- this new release is compatible with recent releases of
hpp-fcl - the SRDF parsing has been improved. Its now possible to load several reference configuration vectors
We also fixed bugs related to recent versions of Boost mostly.
2.0.0 - 2019-01-11
Welcome Pinocchio 2.0.0.
This release makes official the last important and new features for efficiently computing the dynamics of the rigid body systems:
- Analytical derivatives
- Automatic differentiation
- Full scalar type overloading
- Code generation among others
1.3.3 - 2018-10-29
This is for real the last release before Pinocchio 2.0.0 and more.
This release fixes the packaging when hpp-fcl is missing. Thanks to @aelkhour for raising this issue.
1.3.2 - 2018-10-26
This release is the last one before Pinocchio 2.0.0.
It mostly:
- fixes issues introduced by new API of frame functionalities;
- introduces new sample models for manipulator and humanoid systems;
- fixes bugs due to boost 1.58.0;
- improve the readme with credits section.
1.3.1 - 2018-09-25
This new release corrects some bugs or bad deprecations concerning Pinocchio 1.3.0.
1.3.0 - 2018-08-28
This new release introduces analytical derivatives in the corpus of Pinocchio. This feature is still under development but can already be used both in C++ and Python.
This new release also fixes a bunch of bugs related to Eigen and Boost.
1.2.9 - 2018-06-01
This is mostly a maintenance release:
- Fix bug in. lower bounds in Model class
- Update documentation structure (additional work is needed)
- Improve the compatibility with Python 3.x
1.2.8 - 2018-05-18
This is mostly a maintenance release:
- Fix some bugs in JointModel{Translation,Spherical} for ABA algorithm
- Fix a duplication issue in RobotWrapper
- Improve compatibility with recent version of Boost >= 1.67.0
- Romeo is now loaded from the official romeo_description repository
1.2.7 - 2018-04-03
This is mostly a maintenance release:
- Fixes and computation improvements for Lie group operations.
- Adding pickle for spatial classes.
- Allow loading of URDF tree directly from an XML stream.
1.2.6 - 2018-01-15
This is mostly a maintenance release with various fixes to comply with Boost variadic macro on recent OS. It also adds new convention with a LOCAL and a WORLD frame to express Jacobian quantities.
1.2.5 - 2017-10-10
This a maintenance Release. We added some algo to compute the time variation of the Jacobians together with the variation with respect to time of the centroidal momemtum matrix. HPP-FCL works now with Eigen for linear algebra.
1.2.4 - 2017-06-09
This is mostly a maintenance release, with some fix with respect new urdfdom versions, it handles Eigen support with hpp-fcl.
1.2.3 - 2017-02-14
This release fixes some issues with respect to 1.2.1.
API modifications
Interpolate, Differentiate, Integrate are now algorithmic struct which can be efficiently overloaded.
Bindings
Add FCL object bindings
1.2.1 - 2016-10-17
Summary
This release is a minor patch of the previous release 1.2.0.
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New
- The Python bindings are aligned and free of unnecessary allocations
- Add documentation option which allows to not install the documentation
- Introduces container::aligned_vector to automatically create an std::vector with specific aligned allocator
API modifications
- Remove JointDense.
- Remove JointGeneric
Fixes
- Solves the parsing of geometries in URDF module
- Fixes alignment issues on 32 bits architecture
1.2.0 - 2016-09-29
Summary
The main modifications concern the update of the code to comply with the Humanoid Path Planner (HPP).
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Add Joint{Model,Data} classes based on Joint{Model,Data}Base and Joint{Model,Data}Variant. Those classes call directly the visitors and make Variant accessible throw methods
- Add partial Joint{Model,Data}Composite. They allow a stack of joints without adding any Inertia.
- Increase Frame class. Frames can be of several types (BODY, JOINT, SENSOR, etc) and reflect the robot tree as it appears in the URDF conventions. Frames have two attributes: parent which the direct Joint parent in the Joint tree, previousFrame which correspond to the parent Frame in the tree of Frames).
- Adding Python parser which is able to read models written in Python.
- Add algo checker to check the validity of a model.
- Improve documentation.
API modifications
- Model has some methods deprecated. The default name has been removed.
- The Geometry classes have been updated and several methods have been set to deprecated. They now use Frames as parent instead of Joint directly: a Geometry is now supported by a BODY.
- Add active collision pair flags in GeomData which define the active collision pairs.
- Unify naming conventions (nframes, njoints, etc).
Fixes
- The UDRF parser can now deal with more complex topologies. It properly handles the stack of geometries for each BODY.
- Improve packaging mainly around the Python part.
1.1.2 - 2016-05-31
Summary
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Added operational frames (that are a Plucker coordinate frame attached to a parent joint inside a kinematic tree). Position and Jacobian of such frames can be computed
- Geometry primitives can now be handled (and added to the Pinocchio GeometryModel) when encountered in an urdf file
- Implemented simple srdf parsing for GeometryData : parse the desactivated collision pairs
- Added Articulated Body Algorithm (ABA), and CCRBA
- When parsing a urdf file, now look in the environment variable ROS_PACKAGE_PATH for directories where to search for meshes. Users can provide hint directories to search in as a priority. Updated python RobotWrapper consequently
- Added forward dynamics with contact algorithm
- Added algorithms working with vectors of configuration or velocity(either on a JointModel or on a Model, iterating through all the kinematic tree)
- One can integrate a configuration at a constant velocity during a unit time
- One can differentiate two configurations (i.e compute the velocity that must be integrated during a unit time to go from first configuration to the other )
- One can interpolate between two configurations
- One cancompute the distance between two configurations ( such as dist = norm ( difference) )
- One can shoot a configuration uniformly sampled between specified limits
- Added Impulse Dynamic Algorithm
- Completed the list of method to access or call Joint’s data or method when joint are stored in a variant.
- Added JointAccessor that is a general joint encapsulating a JointVariant ( abstracting the use of visitors for the user).
API modifications
- Moved limits from joint models to Model as vectors of size nq for position limits and size nv for velocity and effort limits
- The Geometry objects stored in GeometryModel are now splitted in two types : visual and collision
Minor
- Improved documentation of Data, Model, Spatial Classes
- Improved efficiency when executing algorithms
- One can now create Inertia for simple shapes such as cylinders, boxes, ellipsoid
- Rework some unittests to increase to coverage of whole package ( C++ and Python )
Bugs Fixed
- Fixed operator Inertia x constraint in JointSphericalZYX
- Fixed the Dense conversion of joints (models and datas)
- Fixed bugs in JointRevoluteUnaligned and JointPrismaticUnaligned to access the access when visiting a variant containing such joints with boost::fusion
1.1.0 - 2016-02-04
Summary
New Features
- Spatial classes now follow the CRTP Design Pattern, for performance reasons.
- JointModels are now exposed in Python. This feature enables one to load a URDF model with a precise root joint and to create his/her own model.
- Python models can now be created by hand ( ex: buildEmptyModel() + calls to addBody() )
- Added utility tools to check an urdf model ( same as check_urdf but dislpay the Pinocchio model created from urdf parsing)
- Add unaligned prismatic joint
- Add geometry through Flexible Collision Library (hpp-fcl)
- Add dedicated structs to handle geometry. GeometryModel (list of geometry objects and its relation wrt kinematic model) and GeometryData
- When parsing urdf, meshes can be read from collada files and handled in Pinocchio
- Created parser that handles geometry and exposed it in python
- Add algorithms to update the geometry kinematics, to compute the distances for pairs of collision or if they are colliding or not.
- Added algorithms to compute the kinetic energy, the potential energy and exposed it in python
- The complete documentation is in progress
API modifications
- Change name of kinematics algorithms: now forwardKinematics instead of previous geometry, kinematics and dynamics.
Minor
- SimpleHumanoid is now built with joint limits
- Handle floating joints in urdf parsing
- Slight separation between joints and body in Model to avoid confusion
- Internally, Motion and Force classes now use a 6D-vector instead of two 3D-vectors for linear and angular part
Bugs Fixed
- Fixed a bug when trying to merge a link with its parent in case of fixed joint. Now merge only if it has an inertial tag.
- All the algorithms are now set to inline
- Fix compilation errors
Installation
The source of the release are available in the file pinocchio-1.1.0.tar.gz just below along with a binary version for 64-bits Debian architecture of Pinocchio **pinocchio_1.1.0amd64.deb** and its dependencies. For information, those packages will be installed in _/opt/openrobots directory.
1.0.2 - 2015-09-14
Summary
New Features
- The limits in position, velocity and torque for joints Revolute and Prismatic are now parsed from urdf model and accessible
- Implementation of exp and log functions on SE3 in C++ with its python binding thanks to @aelkhour
- Data now contains information relative to the center of mass position, velocity and acceleration
- Add Lua parser - compatible with RBDL
- Add translational joint
- Add planar joint
Minor
- Reduction of compilation warnings.
Bugs Fixed
- Fixed bug in operator Y*S in JointRevoluteUnaligned
1.0.0 - 2015-04-03
The following algorithms are implemented. • Recursive Newton-Euler algorithm (RNEA, i.e inverse dynamics) • Composite Rigid Body algorithm (CRBA, i.e generalized inertia matrix) • Sparse Cholesky decomposition of the inertia matrix (for constrained forward-dynamics resolution) • Placement Jacobians (i.e application from configuration velocities to end-effector spatial velocities), along with computation of body placements, velocities and accelerations. • Center of mass and its Jacobian
The model can either be parsed from a URDF format or be created by appendending bodies. The following joint models are implemented. • Revolute X, Y, Z (optimized) and unaligned with Cartesian directions • Prismatic X, Y, Z • Spherical (with and withoug singularities) • FreeFlyer (i.e. no constraint, for mobile robots like humanoids – using quaternion representation for the rotation) • Fixed (concatenation of two consecutive bodies)
Wiki Tutorials
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pinocchio at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.3.1 |
| License | BSD-2 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stack-of-tasks/pinocchio.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-01-13 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Justin Carpentier
- Wolfgang Merkt
Authors
![]()
![]()
![]()
![]()
Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone’s algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
Pinocchio was first tailored for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.). It is built upon Eigen for linear algebra and FCL for collision detection. Pinocchio comes with a Python interface for fast code prototyping, directly accessible through Conda.
Pinocchio is now at the heart of various robotics software as Crocoddyl, an open-source and efficient Differential Dynamic Programming solver for robotics, the Stack-of-Tasks, an open-source and versatile hierarchical controller framework or the Humanoid Path Planner, open-source software for Motion and Manipulation Planning.
If you want to learn more about Pinocchio internal behaviors and main features, we invite you to read the related paper and the online documentation.
If you want to dive into Pinocchio directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
Table of contents
- Table of contents
- Introducing Pinocchio 3
- Pinocchio main features
- Documentation
- Examples
- Tutorials
- Pinocchio continuous integrations
- Performances
- Ongoing developments
- Installation
- Visualization
- Citing Pinocchio
- Questions and Issues
- Credits
- Open-source projects relying on Pinocchio
- Acknowledgments
Introducing Pinocchio 3
Pinocchio3 is the latest major release of Pinocchio. It comes with multiple new features, such as:
- Sparse constrained dynamics and its analytical derivatives
- Full support of closed-loop mechanisms
- State-of-the-art frictional contact solvers
- Low-complexity constrained articulated body algorithms
- Full support of multiple-precision floating-point (MPFR) in Python and C++
- Full CasADi support in Python and C++
- Increased support of CppAD and CppADCodeGen
- New SDF and MJCF parsers
- and much more.
Pinocchio main features
Pinocchio is fast:
- C++ template library,
- cache friendly,
- automatic code generation support is available via CppADCodeGen.
Pinocchio is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- support multiple precision arithmetic via Boost.Multiprecision or any similar framework,
- computations of kinematic and dynamic regressors for system identification and more,
- and much more with the support of modern and open-source Automatic Differentiation frameworks like CppAD or CasADi.
Pinocchio is flexible:
- header only,
- C++ 98/03/11/14/17/20 compliant.
Pinocchio is extensible. Pinocchio is multi-thread friendly. Pinocchio is reliable and extensively tested (unit-tests, simulations, and real-world robotics applications). Pinocchio is supported and tested on Windows, Mac OS X, Unix, and Linux (see build status here).
Documentation
The online Pinocchio documentation of the last release is available here. A cheat sheet pdf with the main functions and algorithms can be found here.
Examples
In the examples directory, we provide some basic examples of using Pinocchio in Python. Additional examples introducing Pinocchio are also available in the documentation.
Tutorials
Pinocchio comes with a large bunch of tutorials aiming at introducing the basic tools for robot control. Tutorial and training documents are listed here. You can also consider the interactive Jupyter notebook set of tutorials developed by Nicolas Mansard and Yann de Mont-Marin.
Pinocchio continuous integrations
Pinocchio is constantly tested for several platforms and distributions, as reported below:
| CI on ROS | |
| CI on Linux via APT | |
| CI on OSX via Conda | |
| CI on Windows via Conda | |
| CI on Linux via Robotpkg | |
Performances
Pinocchio exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, Pinocchio can unroll most of the computations directly at compile time, allowing to achieve impressive performances for a large range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical paper. In addition, the introspection may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
Ongoing developments
If you want to follow the current developments, you can directly refer to the devel branch. The master branch only contains the latest release. Any new Pull Request should then be submitted on the devel branch.
Installation
Pinocchio can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the installation procedure.
Conda
You simply need this simple line:
conda install pinocchio -c conda-forge
ROS
Pinocchio is also deployed on ROS. You may follow its deployment status below.
If you’re interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA. Here, you can install Pinocchio using:
sudo apt install ros-$ROS_DISTRO-pinocchio
This installs Pinocchio with HPP-FCL support and with Python bindings. You can then use Pinocchio in your ROS packages by:
- Depending on Pinocchio in your
package.xmlconfig (<depend>pinocchio</depend>) - Including Pinocchio via CMake (
find_package(pinocchio REQUIRED)) and linking against Pinocchio (target_link_libraries(my_library pinocchio::pinocchio))
We include support and hooks to discover the package for both ROS 1 and ROS 2. Examples can be found at the following repositories:
Please note that we always advise including the pinocchio/fwd.hpp header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 1 | ROS 2 | |||
|---|---|---|---|---|
| Melodic | Foxy | |||
| Noetic | Galactic | |||
| Humble | ||||
| Rolling |
Visualization
Pinocchio provides support for many open-source and free visualizers:
- Gepetto Viewer: a C++ viewer based on OpenSceneGraph with Python bindings and Blender export. See here for a C++ example on mixing Pinocchio and Gepetto Viewer.
- Meshcat: supporting visualization in Python and which can be embedded inside any browser.
- Panda3d: supporting visualization in Python and which can be embedded inside any browser.
- RViz: supporting visualization in Python and which can interact with other ROS packages.
Many external viewers can also be integrated. For more information, see the example here.
Citing Pinocchio
To cite Pinocchio in your academic research, please consider citing the software paper and use the following BibTeX entry:
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
And the following one for the link to the GitHub codebase:
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
Citing specific algorithmic contributions
Pinocchio goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning and control. Pinocchio provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc. If you use these algorithms, please consider citing them in your research articles.
- Le Lidec, Q., Montaut, L. & Carpentier, J. (2024, July). From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach. In RSS 2024-Robotics: Science and Systems.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). GJK++: Leveraging Acceleration Methods for Faster Collision Detection. IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). Constrained Articulated Body Dynamics Algorithms. Under review.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). Differentiable collision detection: a randomized smoothing approach. In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2023). Contact models in robotics: a comparative analysis. Under review.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). Collision Detection Accelerated: An Optimization Perspective. In Robotics: Science and Systems (RSS 2O22).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). Proximal and sparse resolution of constrained dynamic equations. In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018).
Questions and Issues
Do you have a question or an issue? You may either directly open a new question or a new issue or, directly contact us via the mailing list pinocchio@inria.fr.
Credits
The following people have been involved in the development of Pinocchio and are warmly thanked for their contributions:
- Justin Carpentier (Inria): main developer and manager of the project
- Nicolas Mansard (LAAS-CNRS): initial project instructor
- Guilhem Saurel (LAAS-CNRS): continuous integration and deployment
- Joseph Mirabel (Eureka Robotics): Lie groups and hpp-fcl implementation
- Antonio El Khoury (Wandercraft): bug fixes
- Gabriele Buondono (LAAS-CNRS): features extension, bug fixes, and Python bindings
- Florian Valenza (Astek): core developments and hpp-fcl support
- Wolfgang Merkt (University of Oxford): ROS integration and support
- Rohan Budhiraja (LAAS-CNRS): features extension
- Loïc Estève (Inria): Conda integration and support
- Igor Kalevatykh (Inria): Panda3d viewer support
- Matthieu Vigne (Wandercraft): MeshCat viewer support
- Robin Strudel (Inria): features extension
- François Keith (CEA): Windows support
- Sarah El Kazdadi (Inria): multi-precision arithmetic support
- Nicolas Torres Alberto (Inria): features extension
- Etienne Arlaud (Inria): RViz viewer support
- Wilson Jallet (LAAS-CNRS/Inria): extension of Python bindings
- Fabian Schramm (Inria): core developper
- Shubham Singh (UT Austin): second-order inverse dynamics derivatives
- Stéphane Caron (Inria): core developper
- Joris Vaillant (Inria): core developer and manager of the project
- Sebastian Castro (The AI Institute): MeshCat viewer feature extension
- Lev Kozlov: Kinetic and potential energy regressors
- Megane Millan (Inria): Features extension and core developer
- Simeon Nedelchev: Pseudo inertia and Log-Cholesky parametrization
- Ajay Sathya (Inria): core developer
If you have participated in the development of Pinocchio, please add your name and contribution to this list.
Open-source projects relying on Pinocchio
- Crocoddyl: A software to realize model predictive control for complex robotics platforms.
- TSID: A software that implements a Task Space Inverse Dynamics QP.
- HPP: A SDK that implements motion planners for humanoids and other robots.
- Jiminy: A simulator based on Pinocchio.
- ocs2: A toolbox for Optimal Control for Switched Systems (OCS2)
- TriFingerSimulation: TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- Casadi_Kin_Dyn: IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- PyRoboPlan: An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- ProxSuite-NLP: A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- Aligator: A versatile and efficient framework for constrained trajectory optimization.
- Simple: The Simple Simulator: Simulation Made Simple.
- LoIK: Low-Complexity Inverse Kinematics.
Acknowledgments
The development of Pinocchio is actively supported by the Gepetto team @LAAS-CNRS and the Willow team @INRIA.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Add parsing meshes with vertices for MJCF format (#2537)
Fixed
- Fix mjcf Euler angle parsing: use xyz as a default value for eulerseq compiler option (#2526)
- Fix variable naming in Python (#2530)
- Fix aba explicit template instantiation (#2541)
- CMake: fix RPATH on macos (#2546)
- Fix aba explicit template instantiation (#2541)
- Fix mjcf parsing of keyframe qpos with newlines (#2535)
- Fix sites parsing for MJCF format (#2548)
3.3.1 - 2024-12-13
Added
- Add
pinocchio_python_parsertarget (#2475)
Fixed
- Fix mjcf parsing of armature and of the default tag in models (#2477)
- Fix undefined behavior when using the site attribute in mjcf (#2477)
- Fix the type of image paths when loading textures in the meshcat visualizer (#2478)
- Fix meshcat examples ([#2503])[https://github.com/stack-of-tasks/pinocchio/pull/2503]
- Fix
pinocchio-test-cpp-parallel-geometrywhen built with Coal (#2502) - Fix scaling support for meshcat (#2511)
Changed
- On GNU/Linux and macOS, hide all symbols by default (#2469)
- Build
pinocchio_defaultwith collision features (#2517)
3.3.0 - 2024-11-06
Added
- Default visualizer can be changed with
PINOCCHIO_VIEWERenvironment variable (#2419) - Add more Python and C++ examples related to inverse kinematics with 3d tasks (#2428)
- Add parsing of equality/connect tag for closed-loop chains for MJCF format (#2413)
- Add compatibility with NumPy 2
__array__API (#2436) - Added argument to let users decide of root joint name when parsing models (urdf, mjcf, sdf) (#2402)
- Allow use of
pathlib.Path | strfor paths in python bindings (#2431) - Add Pseudo inertia and Log-cholesky parametrization (#2296)
- Add Pixi support (#2459)
Fixed
- Fix linkage of Boost.Serialization on Windows (#2400)
- Fix mjcf parser appending of inertias at root joint (#2403)
- Fix unit tests with GCC 13.3 (#2406
- Fix class abstract error for Rviz viewer (#2425)
- Fix compilation issue with MSCV and C++17 (#2437)
- Fix
pinocchio-test-py-robot_wrapperwhen building with SDF and collision support (#2437) - Fix crash when calling
Inertia::FromDynamicParametersin Python with wrong vector size (#2296) - Fix
examples/cassie-simulation.pyandexamples/talos-simulation.py(#2443) - Fix build with CppAd 2024 (#2459)
- Fix
pinocchio-test-cpp-mjcfunittest with Boost 1.86 (#2459) - Fix
pinocchio-test-cpp-constraint-variantsuninitialized values (#2459) - Fix mixing library symbols between Pinocchio scalar bindings (#2459)
- Fix bug for get{Joint,Frame}JacobianTimeVariation (#2466)
Changed
- Modernize python code base with ruff (#2418)
- Does not create a root_joint frame from parsed models (urdf, mjcf and sdf) when no root joint is provided (#2402)
3.2.0 - 2024-08-27
Fixed
- Append pinocchio optional libraries into pkg-config file (#2322)
- Fixed support of DAE meshes with MeshCat (#2331)
- Fixed pointer casts in urdf parser (#2339)
- Remove CMake CMP0167 warnings (#2347)
- Fixed urdfdom in ROS packaging (#2341)
- Fixed overview-urdf cpp example (#2384)
- Fixed mjcf model without a base link parsing (#2386)
- Fixed talos-simulation.py, simulation-contact-dynamics.py and simulation-closed-kinematic-chains.py examples (#2392)
Added
- Add getMotionAxis method to helical, prismatic, revolute and ubounded revolute joint (#2315)
- Add initial compatiblity with coal (coal needs
-DCOAL_BACKWARD_COMPATIBILITY_WITH_HPP_FCL=ON) (#2323) - Add compatibility with jrl-cmakemodules workspace (#2333)
- Add
collision_colorparameter toMeshcatVisualizer.loadViewerModel(#2350) - Add
BuildFromMJCFfunction to RobotWrapper (#2363) - Add more CasADi examples (#2388)
Removed
- Remove deprecated headers related to joint constraints (#2382)
Changed
- Use eigenpy to expose
GeometryObject::meshMaterialvariant (#2315) - GepettoViewer is no more the default viewer for RobotWrapper (#2331)
- Modernize python code base with ruff (#2367)
- Restructure CppAD and CasADi examples (#2388)
- Enhance and fix CppAD benchmarks outputs (#2393)
3.1.0 - 2024-07-04
Fixed
- Fix
appendModelwhen joints after the base are in parallel (#2295) - Fix
appendModelbuild when called with template arguments different than the ones fromcontext(#2284) - Fix
TransformRevoleTpl::rotationandTransformHelicalTpl::rotationbuild (#2284) - Fix compilation issue for Boost 1.85 (#2255)
- Fix python bindings of
contactInverseDynamics(#2263) - Deactivate
BUILD_WITH_LIBPYTHONwhen building with PyPy (#2274) - Fix Python bindings cross building with
hpp-fcl(#2288) - Fix build issue on Windows when a deprecated header is included (#2292)
- Fix build issue on Windows when building in Debug mode (#2292)
- Fix visualization of meshes in meshcat (#2294)
- Fix Anymal simulation test (#2299)
- Fix contact derivatives and impulse dynamics tests (#2300)
- Fix CMake compatibility with old console_bridge version (#2312)
Added
- Python unittest for
contactInverseDynamicsfunction (#2263) - Added helper functions to return operation count of CasADi functions. (#2275)
- C++ and Python unittest for
dIntegrateTransportto check vector transport and its inverse (#2273) - Add kinetic and potential energy regressors (#2282)
Removed
- Remove header
list.hppinclude for bindings of model and rnea (#2263)
3.0.0 - 2024-05-27
Added
Automatic differentiation
- Full support of Casadi in the main library by @jcarpent and @ManifoldFR
- Full support of Casadi for Python bindings by @jcarpent
- Full support of Boost.Multiprecision in the main library by @jcarpent
- Full support of Boost.Multiprecision for Python bindings by @jcarpent
- Full support of CppAD and CppADCodeGen in the main library by @jcarpent
- Full support of CppAD and CppADCodeGen for Python bindings by @jcarpent and @proyan
Core features
- Full support of constrained dynamical systems by @jcarpent
- Full support of derivatives of constrained dynamical systems by @jcarpent and @proyan
- Extended algorithms for constrained dynamics: constrained ABA, PV solvers, etc. by @jcarpent and @AjSat
- Add frictional contact solvers (PGS, ADMM) by @jcarpent
- Add contact inverse dynamics by @quentinll
- Full support of broadphase algorithms in Pinocchio by @jcarpent
- New joint supports (Helicoidal, Universal) by @fabinsch and @MegMll
- Add new algorithms for supporting Delassus factorizations for sparse, dense and tree-based systems by @jcarpent
- Add full OpenMP support for many algorithms (ABA, RNEA, collision detection, etc.) by @jcarpent
- Full support of GeometryModel, GeometryObject serialization by @jcarpent
- Extended support of Meshcat by @jcarpent, @ManifoldFR and @jorisv
- Extended testing and support of Lie groups operations by @jcarpent and @ManifoldFR
- Full support of AVX512 and AVX2 vectorization for Python bindings by @jcarpent
- Full support of the robot armature in RNEA, CRBA and ABA
- Extended formulation of CRBA and ABA using WORLD convention for reduced computational burden in the derivative algorithms
Parsers
Extra Algorithms
- Added reachable workspace computation and vizualisation in collaboration with @askuric based on pycapacity by @MegMll and @jorisv
Packaging
- Full support of template instantiation by @fabinsch and @jorisv
- Enhance support for Windows-based systems by @jorisv
- Splitting of the Pinocchio into sub-library for isolation by @jorisv
Compatibility
- Add
PINOCCHIO_ENABLE_COMPATIBILITY_WITH_VERSION_2define to activate compatibility with Pinocchio 2 API
Changed
C++
- Change minimum required version of C++ to C++11. Check for compatibility here: https://en.cppreference.com/w/cpp/compiler_support/11
- Replace
pinocchio::BiasZeroTplbypinocchio::MotionZeroTpl - Replace
pinocchio::fusion::JointVisitorBasebypinocchio::fusion::JointUnaryVisitorBase - Replace
pinocchio::fusion::push_frontbypinocchio::fusion::append - Replace
pinocchio::regressor::computeStaticRegressorbypinocchio::computeStaticRegressor - Replace
pinocchio::jointJacobianbypinocchio::computeJointJacobian - Replace
pinocchio::frameJacobianbypinocchio::computeFrameJacobian - Replace
pinocchio::framesForwardKinematicsbypinocchio::updateFramePlacements - Replace
pinocchio::kineticEnergybypinocchio::computeKineticEnergy - Replace
pinocchio::potentialEnergybypinocchio::computePotentialEnergy - Replace
pinocchio::computeCentroidalDynamicsbypinocchio::computeCentroidalMomentumandpinocchio::computeCentroidalMomentumTimeVariation - Replace
pinocchio::centerOfMass(const ModelTpl&, DataTpl&, int, bool)bypinocchio::centerOfMass(const ModelTpl&, DataTpl&, KinematicLevel, bool) - Replace
pinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, int)bypinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, KinematicLevel) - Replace
pinocchio/algorithm/dynamics.hppbypinocchio/algorithm/constrained-dynamics.hpp - Change the order of arguments in some of
pinocchio::GeometryObject’s constructors - Deprecate
pinocchio/algorithm/parallel/geometry.hppmoved atpinocchio/collision/parallel/geometry.hpp - Deprecate
pinocchio/spatial/fcl-pinocchio-conversions.hppmoved atpinocchio/collision/fcl-pinocchio-conversions.hpp - Deprecate
pinocchio/parsers/sample-models.hppmoved atpinocchio/multibody/sample-models.hpp - Deprecate
pinocchio/math/cppad.hppmoved atpinocchio/autodiff/cppad.hpp - Deprecate
pinocchio/math/cppadcg.hppmoved atpinocchio/autodiff/cppadcg.hpp - Deprecate
pinocchio/math/casadi.hppmoved atpinocchio/autodiff/casadi.hpp - Deprecate
pinocchio::FrameTpl::parentreplaced bypinocchio::FrameTpl::parentJoint - Deprecate
pinocchio::FrameTpl::previousFramereplaced bypinocchio::FrameTpl::parentFrame - Deprecate
pinocchio/algorithm/contact-dynamics.hppalgorithms replaced bypinocchio/algorithm/constrained-dynamics.hpp
Python
- Replace
pinocchio.utils.skewbypinocchio.skew - Replace
pinocchio.utils.se3ToXYZQUATbypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.utils.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.robot_wrapper.RobotWrapper.frameClassicAccelerationbypinocchio.robot_wrapper.RobotWrapper.frameClassicalAcceleration - Replace
pinocchio.robot_wrapper.RobotWrapper.jointJacobianbypinocchio.robot_wrapper.RobotWrapper.computeJointJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.frameJacobianbypinocchio.robot_wrapper.RobotWrapper.computeFrameJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.initDisplaybypinocchio.robot_wrapper.RobotWrapper.initViewer - Replace
pinocchio.robot_wrapper.RobotWrapper.loadDisplayModelbypinocchio.robot_wrapper.RobotWrapper.loadViewerModel - Replace
pinocchio.deprecated.se3ToXYZQUATtuplebypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.deprecated.se3ToXYZQUATbypinocchio.SE3ToXYZQUAT - Replace
pinocchio.deprecated.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.deprecated.buildGeomFromUrdf(model, filename, [str])bypinocchio.buildGeomFromUrdf(model, filename, type, package_dirs, mesh_loader) - Replace
pinocchio.rpy.npToTTuplebypinocchio.utils.npToTTuple - Replace
pinocchio.rpy.npToTuplebypinocchio.utils.npToTuple - Replace
pinocchio.jacobianSubtreeCoMJacobianbypinocchio.jacobianSubtreeCenterOfMass
Removed
C++
- Remove
pinocchio::setGeometryMeshScales - Remove some
pinocchio::forwardDynamicssignatures - Remove some
pinocchio::impulseDynamicssignatures
Python
- Remove
pinocchio.utils.cross - Remove
pinocchio.robot_wrapper.RobotWrapper.initMeshcatDisplay - Remove
pinocchio.deprecated.setGeometryMeshScalesbypinocchio
2.7.1 - 2024-04-26
Changed
- Modify algorithm that appends a model to another (#2218)
- Set NOMINMAX as a public definitions on Windows (#2139)
- Improve documentation of
enum ReferenceFrame(#2190) - Improve documentation of
getJointJacobian(#2193).
Fixed
- CMake now uses Relative Path instead of Absolute (#2202)
- Order of frames in
ReducedModelis now the same as in the full model (#2160) - Remove a lot of warnings (#2139)
-
MeshcatVisualizerdoesn’t crash anymore when there is no collision model defined (#2147) - Fix MSVC build (#2155)
- Fix stub generation (#2166)
- Clean up empty documentation pages and sections (#2167)
- Fix SO(3) title and cross-section reference in the documentation (#2210)
Added
- Add
examples/floating-base-velocity-viewer.pyto visualize floating base velocity (#2143) - Add remark to the documentation of
getFrame(Classical)Accelerationfunctions (#2169) - Allow use of installed jrl-cmakemodules (#2216)
2.7.0 - 2024-01-23
Added
- Add
GeometryObject::meshMaterialattribute (#2084) - Add Parser for mujoco mjcf models
pinocchio::mjcf::buildModelandpinocchio::mjcf::buildGeom
Fixed
- Use bp::ssize_t for recent version of Windows compilers (#2102)
- Fix missing include for Boost >= 1.83 (#2103)
- Remove f-strings to fix install with python 2 (#2110)
- CMake: stop exporting CppAd/cppadcodegen & fetch submodule if not available (#2112)
- Fix malloc issue in CRBA algo (#2126)
- Fix build cppad and cppadcg with Boost < 1.77 (#2132)
2.6.21 - 2023-11-27
Added
- Add inverse dynamics (
rnea) Python and C++ example (#2083) - Add visualization of Frames in MeshCat viewer (#2098)
Fixed
- Re-initialize
Ycrb[0]incrbaMinimal(#2040) - Fix custom scalar use in
logfunction (#2047) - Raise exception on wrong input size in
XYZQUATToSE3Python binding function (#2073) - Remove memory leak in
buildGeomFromUrdfandbuildGeomFromUrdfStringPython binding functions (#2082https://github.com/stack-of-tasks/pinocchio/pull/2082) - Fix Panda3D viewer examples (#2087)
- Fix centroidal dynamics derivatives with respect to time (#2094))
Changed
- Rename freeflyer_joint to root_joint in
humanoidsample model (#2043) - CMake minimal version is now 3.10 (#2055)
- Split headers and sources in different directories to have a more standard C++ project (#2070)
Removed
- Remove support to
hpp-fcl< v2.0.0 (#2086)
2.6.20 - 2023-08-09
What’s Changed
- Fix support of recent versions of Boost for CppAD and CppADCodeGen by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2000
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 1e0c5aff1147d50d58bf4185a55ff564c9b6e027 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2007
- Enabled copy and deepcopy by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1882
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 9f963f67ebb889792175776c5ee00134d7bb569b by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2013
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2029
2.6.19 - 2023-06-19
What’s Changed
- Add Motion::toHomogeneousMatrix by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1946
- The insatiable English teacher PR 🧙 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1957
- require C++14 for Boost >= 1.81 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1949
- CMake: an example require python 3 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1966
- Fix IK example in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1963
- Issue templates by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1971
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1976
- Enhance CMake packaging for Windows by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1984
- Documentation by @drewhamiltonasdf in https://github.com/stack-of-tasks/pinocchio/pull/1986
- Add support for ccache on Conda build by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1987
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1988
- Enhance compatibility with new Python versions by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1996
New Contributors
- @drewhamiltonasdf made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1986
2.6.18 - 2023-04-29
What’s Changed
- Support force in pybind11 by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1868
- Fix some Python bindings signatures and add stub generation. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1869
- Fix IK example by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1875
- Remove empty examples by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1878
- build(deps): bump ros-industrial/industrial_ci from 6a8f546cbd31fbd5c9f77e3409265c8b39abc3d6 to 4b78602d67127a63dce62926769d9ec4e2ce72e4 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1890
- add static-contact-dynamics example by @PepMS in https://github.com/stack-of-tasks/pinocchio/pull/1891
- Update documentation of
JointModel.shortnamein python bindings by @Danfoa in https://github.com/stack-of-tasks/pinocchio/pull/1892 - update doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1898
- Document that joints need to be added in depth-first order by @traversaro in https://github.com/stack-of-tasks/pinocchio/pull/1899
- fix INSTALL_RPATH on ROS & OSX by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1908
- Python example: update joint placements after loading a URDF by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1911
- Remove more empty sections from the docs by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1912
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1914
- update doc for fixed joint by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1920
- doc: more information about frames on cheatsheet by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1930
- Define operational frames in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1929
- Remove support of np.matrix by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1941
- Fix other np.matrix issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1942
New Contributors
- @PepMS made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1891
- @Danfoa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1892
2.6.17 - 2023-02-15
What’s Changed
- Fix Jlog6 documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1857
- Add documentation to Jlog3 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1858
- [python/visualize] Extend visualizer features and implement them for MeshcatVisualizer by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1845
- Second-order RNEA derivatives by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1860
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1863
- Fix support of AVX2. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1865
2.6.16 - 2023-02-02
What’s Changed
- Enforce testing of Python bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1853
- Fix issue with Python 3.6 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1855
2.6.15 - 2023-01-31
What’s Changed
- More documentation for getJointJacobian by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1836
- Error when integrating SE3 with the same vector given as input and output by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1775
- Documentation for Jlog6 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1842
- remove useless header by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1846
- Fix issue with recent change on master branch for ROS-CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1847
- Fix issue with old version of Boost and eigenpy >= 2.9.0 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1851
2.6.14 - 2023-01-13
What’s Changed
- Fix registration of ptr to Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1832
2.6.13 - 2023-01-12
What’s Changed
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1790
- Skip collision pairs between geom on same joint in appendGeometryModel by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1791
- Fix issue with Boost 1.78 on OSX systems by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1792
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1793
- Add helper functions for computing supported inertia and force by frames by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1796
- Follow-up : Supported inertia by frame by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1797
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1799
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1801
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1802
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1809
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1811
- Fix Python issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1821
- Allow to use std::shared_ptr by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1822
2.6.12 - 2022-11-06
What’s Changed
- Elevate check for ambiguous input argument to an exception by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1781
- Fix packaging issues + sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1782
- Fix issue with clang by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1784
2.6.11 - 2022-10-25
What’s Changed
- URDF: fix loading relative mesh path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1748
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1750
- Add @note to difference documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1753
- Configuration limits for joints and model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1756
- Address remaining warnings + speed-up build for BUILD_TESTING=OFF by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1764
- Add status of ROS builds to README by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1770
- pinocchio/visualize: Add support for cone shape in meshcat dispaly by @whtqh in https://github.com/stack-of-tasks/pinocchio/pull/1769
- Updates README by @nikoandpiko in https://github.com/stack-of-tasks/pinocchio/pull/1776
- Enhance cmake packaging by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1777
New Contributors
- @stephane-caron made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1753
- @whtqh made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1769
- @nikoandpiko made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1776
2.6.10 - 2022-09-14
What’s Changed
- fix syntax for python 2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1734
- Expose
removeGeometryObjectin python binding by @Jiayuan-Gu in https://github.com/stack-of-tasks/pinocchio/pull/1736 - Fix relocalable by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1738
- Fix relative path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1742
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1744
New Contributors
- @Jiayuan-Gu made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1736
2.6.9 - 2022-08-12
What’s Changed
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1669
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1670
- Sync example-robot-data by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1671
- update to pybind11 v2.9.2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1674
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1678
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1677
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1679
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1692
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1691
- Fix bug in appendModel by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1693
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1695
- Fix geometry color default value by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1699
- Add python example appending Urdf and another model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1698
- SO3 diff impl use quaternion instead of rotation matrix by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1702
- add cheat sheet to doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1705
- cmake/utils: no need for python here by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1709
- Add header only target by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1712
- cmake: relocatable package for recent CMake versions by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1716
- cmake: modernize header-only lib by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1718
- ROS2/Colcon integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1719
- CMake: update to eigenpy 2.7.10 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1720
- Fix weird test failure on Conda by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1723
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1727
- ROS2 release support by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1681
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1732
New Contributors
- @fabinsch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1698
2.6.8 - 2022-06-06
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1648
- Fix integrate method for SO2 by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1652
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1653
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1658
- Extend current Coriolis computations to account for Cristoffel symbol of first kind by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1665
- Fix method play() of rviz_visualizer by @danielcostanzi18 in https://github.com/stack-of-tasks/pinocchio/pull/1667
- chore: Included githubactions in the dependabot config by @nathannaveen in https://github.com/stack-of-tasks/pinocchio/pull/1659
- Enable ubuntu 22.04 on CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1668
New Contributors
- @pre-commit-ci made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1648
- @Toefinder made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1652
- @danielcostanzi18 made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1667
- @nathannaveen made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1659
2.6.7 - 2022-05-03
What’s Changed
- add dummy .pre-commit-config.yaml by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1629
- Avoid triggering multi-line comment in Latex formula by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1630
- Make Pinocchio v2 compatible with HPP-FCL v2 by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1631
- Add example of collision with a point cloud by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1636
- follow up on hpp-fcl v2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1637
- Fix pickling for Boost >= 1.7.4 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1640
2.6.6 - 2022-03-22
What’s Changed
- Support HPP-FCL for ROS binaries & introduce ROS2 ament integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1622
2.6.5 - 2022-02-14
What’s Changed
- Fix warning issue in Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1546
- RVizVisualizer update by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1549
- Correct link to examples. Removed python subdirectory in the link as the directory does not exist anymore by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1561
- Add CONTRIBUTING.md file for newcomers by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1563
- Add list of projects based on Pinocchio by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1566
- Fix constrained dynamics formula by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1567
- Append “/share” to AMENT_PREFIX_PATH by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1568
- Expose dIntegrateTransport by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1572
- [timings] Reduce allocations in finite-difference baselines by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1583
- [computeAllTerms] Add missing noalias to avoid temporary allocation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1582
- Missing
noaliasby @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1585 - [multibody/model] add joint arg validation by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1586
- [multibody/geometry] Add method to remove an object. by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1588
- Fix bug in ABAChecker by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1599
- Update README.md by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1604
- allow
robot_wrapperto share data with itsvizby @vnghia in https://github.com/stack-of-tasks/pinocchio/pull/1606
New Contributors
- @duburcqa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1585
- @vnghia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1606
2.6.4 - 2021-11-02
What’s Changed
- Change ‘typedef’ to ‘using’, add curly braces by @the-raspberry-pi-guy in https://github.com/stack-of-tasks/pinocchio/pull/1476
- [CMake] set INSTALL_RPATH for python on linux by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1482
- [visualize] captureImage() method by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1480
- ci: update ROS CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1483
- Fix issue with Pool when FCL is missing by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1485
- fix module name by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1487
- Add RVizVisualizer by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1488
- fix reshape issues by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1489
- Remove useless reference to L-GPL + remove of useless files by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1500
- Update old function, remove mobile robot wrapper by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1490
- Allows the display of {COLLISION,VISUAL} in MeshCat by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1502
- Delete submodule travis by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1509
- Add citation by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1511
- badges: add PyPI by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1510
- Add support of Convex within MeshCat + improve GeometryObject bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1530
- [python] Fix BaseVisualizer constructor. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1533
- [python] Add pybind11 header. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1519
- make copy of supports during model cast by @rubengrandia in https://github.com/stack-of-tasks/pinocchio/pull/1536
- [python] Simplify buildGeomFromUrdf and allow to build from string. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1538
- Sync submodule by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1542
- Turn off automatic documentation generation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1541
New Contributors
- @the-raspberry-pi-guy made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1476
- @ManifoldFR made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1480
- @EtienneAr made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1488
- @kozakromch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1489
- @rubengrandia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1536
2.6.3 - 2021-07-27
This new release fixes bugs in MeshCat rendering, loading of ROS path and in the Centroidal dynamics derivatives
2.6.2 - 2021-07-05
This new release provides fixes include orders in the unit tests due to recent versions of Boost. It also provides more content to the Readme. This new release prefigures the new Pinocchio 3.x
2.6.1 - 2021-06-08
Enhancement:
- extended support of serialization of FCL primitives
- extended support of Boost.Variant in Python
Fixes:
- fix bug when loading URDF on Windows
- fix handling of Frame inertia
2.6.0 - 2021-04-11
This new release provides:
- improvement for handling collision/distance requests
- support of parallel computations for ABA, RNEA and collisions algorithms (more to come soon)
- additional features for the RobotWrapper in Python
- support of Capsule for Meshcat
- happened Inertia information to Frames
- fixes for doc issues
- improve numerical robustness when two inertias are Zero
2.5.6 - 2021-01-23
This new release comes with a more consistent ABA algorithm (data.a_gf used instead of classic data.a) and more outcomes for computeAllTerms. In addition, it provides some extended supports to PyPy.
2.5.5 - 2021-01-07
This maintenance release enhances the whole CMake packaging of the project and provides additional features for the Python bindings.
2.5.4 - 2020-11-26
This new release enhances the compatibility of Pinocchio with former distributions, provides better support to Euler angles and fixes some bugs.
2.5.3 - 2020-11-13
This new release fixes some issues with the Python bindings, add new examples and extend the whole tests.
2.5.2 - 2020-11-02
This new release enhances the compatibility with Windows, provides new tools eitheir to work on joint configurations and also to compute the kinematic regressors.
2.5.1 - 2020-10-12
This new release provides:
- improvements on the whole project coverage
- better support of Windows v142
- support of joint friction and damping (only at the interface level)
- new algorithm to retrieve the Coriolis matrix from RNEA/ABA derivatives
2.5.0 - 2020-08-31
In this new release, we have:
- a full memory shared in the Python bindings, i.e. that all the Eigen object can now be changed in Python.
- better handling of multiprecision arithmetic
- improved CMake packaging
- fix for Autodiff
2.4.7 - 2020-07-20
This new release provides:
- an extended API for dealing with Lie groups and the related computations (integration, difference, derivatives, etc.)
- the Lie groups have now their Python bindings for easy code prototyping
- the kinematics derivatives of the Frames have been introduced as well as the extension of current Joints derivatives
- the packaging of the project has been improved too.
2.4.6 - 2020-06-15
This new release of Pinocchio removes the use of pkg-config to check dependencies and provides a full compatibility and support for Windows systems.
2.4.5 - 2020-05-23
This new release extends the current frames algorithms to also consider the LOCAL_WORLD_ALIGNED reference frame. It also exposes the values of the enum_ for simplified usage.
2.4.4 - 2020-05-13
This new release provides:
- new helpers function to retrieve frame velocities and accelerations
- for each collision pair, it is now possible to provide specific collision checking settings
- support to display convex hulls in viewers
It also fixes:
- the support of Panda3d
and enhances the global CMake packaging of the project.
2.4.3 - 2020-04-24
This new release provides a new Viewer, named Panda3d, for easy code visualization in Python. It also provides additional fixes to the Code Generation support.
2.4.2 - 2020-04-21
This new release of Pinocchio provides new features for dealing with Lie groups:
- improved operations over the differential operations of the integrate function
- new functions for transporting some matrix between the two endpoints of the integrate function
- the RPY functions are now robust over singularities
- the support of autodiff frameworks has been improved to also cope with Lie groups features
This release also provides:
- a packaging fixe with respect to the URDFDOM dependency
- the Python bindings should now be without memory leak
2.4.1 - 2020-04-15
This new release fixes a bug introduced in Pinocchio 2.4.0 concerning the method ModelTpl::addFrame. This release also provides better support for the checking of the CppAD and CppADCodeGen versions.
2.4.0 - 2020-04-09
This new release of Pinocchio makes several improvements:
- improve compatibility with hpp-fcl
- improve compatibility with CppAD and notably the Lie algebra features
- a better CMake >= 3.0 export of the project
- new examples for Code generation
- improved Python bindings
- improved support for Boost.Multiprecision
- reduce the memory usage when compilation unit tests
and we have started to move some dependencies like urdfdom to the pinocchio.so library to avoid additional compilations issues and to useless compilations burden.
2.3.1 - 2020-02-20
This new release provides:
- some fixes with respect to minor bugs introduced in Pinocchio 2.3.0
- an enhance detection of Python
- improves the compilation memory overhead
2.3.0 - 2020-02-18
This new release provides:
- full compatibility with CMake export
- full compatibility with Numpy.Array
- examples for Code generation
- better support of C++11
- minor bug fixes
- improves coverage
- uniformizes function signature
- improves interoperability between Numpy and Pinocchio
- add many examples
- full integration of Python bindings of hpp-fcl
- supports the pickling and the serialization of Data
2.2.3 - 2019-12-30
This new release provides:
- pickling and serialization of Data structures
- provide new algorithms to create reduce models
It also improves the compatibility with the Transform used in HPP-FCL. It also fixes various bugs. It also comes with new and detailed examples.
2.2.2 - 2019-12-11
This new release:
- improves the compatibility with HPP-FCL bindings
- improves the documentation of the project with more examples
- fixes some bugs related to Eigen
- add new algorithms to compute the centroidal matrix and its time derivatives
2.2.1 - 2019-11-25
This new release fixes the ROS package version number and updates the robot models.
2.2.0 - 2019-11-25
This new release of Pinocchio introduces:
- analytical formula for Hessian of the kinematics
- derivatives of the difference operation
- new derivatives for static torque quantity
- new models for tests and examples.
It adds some signature non-exposed in Python. It also deletes outdated function signatures that have been deprecated in 2.0.x versions. It also improves the packaging with respect to ROS or other robotics frameworks.
2.1.11 - 2019-10-27
This release fixes missing update of the ROS package.xml file with the new version.
2.1.10 - 2019-10-25
This new release allows throwing when some input arguments are not fulfilled (useful feature in Python). It also provides new support for Hessian of the kinematics. Finally, the project is now packaged for ROS integration.
2.1.9 - 2019-10-09
This is a maintenance release, with some fixes concerning the contact dynamics, better support of LOCAL_WORLD_ALIGNED option and fixes with respect to some recent versions of CppADCodeGen.
2.1.8 - 2019-09-30
This is a maintenance release providing several fixes:
- remove memory allocation in ABA derivatives with contact forces
- better handling of boost::Variant
- better support of Majax
It also provides new features in the documentation of mathematical formula.
2.1.7 - 2019-09-10
This new release improves:
- the support of AutoDiff frameworks
- the efficiency of some core algorithms
fixes:
- the support of Majax
- the compatibility with Python 2/3
2.1.6 - 2019-08-05
This new release improves the packaging of the project and provides new algorithms to compute the Jacobians of the center of mass of each subtree.
2.1.5 - 2019-07-16
This new release provides support for JointMimic and JointRevoluteUnboundedUnaligned. It also comes with the full support of CasADi.
Thanks to @mkatliar for helping us to provide this support.
2.1.4 - 2019-06-22
This new release provides some fixes with respect to Python bindings, C++17 as well as new important features:
- dynamic regressor for identification
- add support of multiple viewers
- improve analytical derivatives
2.1.3 - 2019-04-30
This new release fixes some issues with Python 3 and C++17 standard. It also provides additional documentation, enlarges the current Python bindings and uniformizes naming convention in Python.
2.1.2 - 2019-04-05
This new release aims at fixing compilations issues when COLLISION module is activated. It also provides some fixes concerning the loading of meshes.
A new feature provided by this release concerns the possibility of appending two models together.
2.1.1 - 2019-03-27
This new release fixes compatibility bugs with previous release 2.1.0. It also provides a serialization interface for Spatial classes and the Model class.
2.1.0 - 2019-02-27
This new release makes some major improvements:
- it is now possible to use MeshCat, another viewer working in the browser directly in Python
- the Python bindings are now hardly tested and uniformized with respect to the C++ API
- this new release is compatible with recent releases of
hpp-fcl - the SRDF parsing has been improved. Its now possible to load several reference configuration vectors
We also fixed bugs related to recent versions of Boost mostly.
2.0.0 - 2019-01-11
Welcome Pinocchio 2.0.0.
This release makes official the last important and new features for efficiently computing the dynamics of the rigid body systems:
- Analytical derivatives
- Automatic differentiation
- Full scalar type overloading
- Code generation among others
1.3.3 - 2018-10-29
This is for real the last release before Pinocchio 2.0.0 and more.
This release fixes the packaging when hpp-fcl is missing. Thanks to @aelkhour for raising this issue.
1.3.2 - 2018-10-26
This release is the last one before Pinocchio 2.0.0.
It mostly:
- fixes issues introduced by new API of frame functionalities;
- introduces new sample models for manipulator and humanoid systems;
- fixes bugs due to boost 1.58.0;
- improve the readme with credits section.
1.3.1 - 2018-09-25
This new release corrects some bugs or bad deprecations concerning Pinocchio 1.3.0.
1.3.0 - 2018-08-28
This new release introduces analytical derivatives in the corpus of Pinocchio. This feature is still under development but can already be used both in C++ and Python.
This new release also fixes a bunch of bugs related to Eigen and Boost.
1.2.9 - 2018-06-01
This is mostly a maintenance release:
- Fix bug in. lower bounds in Model class
- Update documentation structure (additional work is needed)
- Improve the compatibility with Python 3.x
1.2.8 - 2018-05-18
This is mostly a maintenance release:
- Fix some bugs in JointModel{Translation,Spherical} for ABA algorithm
- Fix a duplication issue in RobotWrapper
- Improve compatibility with recent version of Boost >= 1.67.0
- Romeo is now loaded from the official romeo_description repository
1.2.7 - 2018-04-03
This is mostly a maintenance release:
- Fixes and computation improvements for Lie group operations.
- Adding pickle for spatial classes.
- Allow loading of URDF tree directly from an XML stream.
1.2.6 - 2018-01-15
This is mostly a maintenance release with various fixes to comply with Boost variadic macro on recent OS. It also adds new convention with a LOCAL and a WORLD frame to express Jacobian quantities.
1.2.5 - 2017-10-10
This a maintenance Release. We added some algo to compute the time variation of the Jacobians together with the variation with respect to time of the centroidal momemtum matrix. HPP-FCL works now with Eigen for linear algebra.
1.2.4 - 2017-06-09
This is mostly a maintenance release, with some fix with respect new urdfdom versions, it handles Eigen support with hpp-fcl.
1.2.3 - 2017-02-14
This release fixes some issues with respect to 1.2.1.
API modifications
Interpolate, Differentiate, Integrate are now algorithmic struct which can be efficiently overloaded.
Bindings
Add FCL object bindings
1.2.1 - 2016-10-17
Summary
This release is a minor patch of the previous release 1.2.0.
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New
- The Python bindings are aligned and free of unnecessary allocations
- Add documentation option which allows to not install the documentation
- Introduces container::aligned_vector to automatically create an std::vector with specific aligned allocator
API modifications
- Remove JointDense.
- Remove JointGeneric
Fixes
- Solves the parsing of geometries in URDF module
- Fixes alignment issues on 32 bits architecture
1.2.0 - 2016-09-29
Summary
The main modifications concern the update of the code to comply with the Humanoid Path Planner (HPP).
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Add Joint{Model,Data} classes based on Joint{Model,Data}Base and Joint{Model,Data}Variant. Those classes call directly the visitors and make Variant accessible throw methods
- Add partial Joint{Model,Data}Composite. They allow a stack of joints without adding any Inertia.
- Increase Frame class. Frames can be of several types (BODY, JOINT, SENSOR, etc) and reflect the robot tree as it appears in the URDF conventions. Frames have two attributes: parent which the direct Joint parent in the Joint tree, previousFrame which correspond to the parent Frame in the tree of Frames).
- Adding Python parser which is able to read models written in Python.
- Add algo checker to check the validity of a model.
- Improve documentation.
API modifications
- Model has some methods deprecated. The default name has been removed.
- The Geometry classes have been updated and several methods have been set to deprecated. They now use Frames as parent instead of Joint directly: a Geometry is now supported by a BODY.
- Add active collision pair flags in GeomData which define the active collision pairs.
- Unify naming conventions (nframes, njoints, etc).
Fixes
- The UDRF parser can now deal with more complex topologies. It properly handles the stack of geometries for each BODY.
- Improve packaging mainly around the Python part.
1.1.2 - 2016-05-31
Summary
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Added operational frames (that are a Plucker coordinate frame attached to a parent joint inside a kinematic tree). Position and Jacobian of such frames can be computed
- Geometry primitives can now be handled (and added to the Pinocchio GeometryModel) when encountered in an urdf file
- Implemented simple srdf parsing for GeometryData : parse the desactivated collision pairs
- Added Articulated Body Algorithm (ABA), and CCRBA
- When parsing a urdf file, now look in the environment variable ROS_PACKAGE_PATH for directories where to search for meshes. Users can provide hint directories to search in as a priority. Updated python RobotWrapper consequently
- Added forward dynamics with contact algorithm
- Added algorithms working with vectors of configuration or velocity(either on a JointModel or on a Model, iterating through all the kinematic tree)
- One can integrate a configuration at a constant velocity during a unit time
- One can differentiate two configurations (i.e compute the velocity that must be integrated during a unit time to go from first configuration to the other )
- One can interpolate between two configurations
- One cancompute the distance between two configurations ( such as dist = norm ( difference) )
- One can shoot a configuration uniformly sampled between specified limits
- Added Impulse Dynamic Algorithm
- Completed the list of method to access or call Joint’s data or method when joint are stored in a variant.
- Added JointAccessor that is a general joint encapsulating a JointVariant ( abstracting the use of visitors for the user).
API modifications
- Moved limits from joint models to Model as vectors of size nq for position limits and size nv for velocity and effort limits
- The Geometry objects stored in GeometryModel are now splitted in two types : visual and collision
Minor
- Improved documentation of Data, Model, Spatial Classes
- Improved efficiency when executing algorithms
- One can now create Inertia for simple shapes such as cylinders, boxes, ellipsoid
- Rework some unittests to increase to coverage of whole package ( C++ and Python )
Bugs Fixed
- Fixed operator Inertia x constraint in JointSphericalZYX
- Fixed the Dense conversion of joints (models and datas)
- Fixed bugs in JointRevoluteUnaligned and JointPrismaticUnaligned to access the access when visiting a variant containing such joints with boost::fusion
1.1.0 - 2016-02-04
Summary
New Features
- Spatial classes now follow the CRTP Design Pattern, for performance reasons.
- JointModels are now exposed in Python. This feature enables one to load a URDF model with a precise root joint and to create his/her own model.
- Python models can now be created by hand ( ex: buildEmptyModel() + calls to addBody() )
- Added utility tools to check an urdf model ( same as check_urdf but dislpay the Pinocchio model created from urdf parsing)
- Add unaligned prismatic joint
- Add geometry through Flexible Collision Library (hpp-fcl)
- Add dedicated structs to handle geometry. GeometryModel (list of geometry objects and its relation wrt kinematic model) and GeometryData
- When parsing urdf, meshes can be read from collada files and handled in Pinocchio
- Created parser that handles geometry and exposed it in python
- Add algorithms to update the geometry kinematics, to compute the distances for pairs of collision or if they are colliding or not.
- Added algorithms to compute the kinetic energy, the potential energy and exposed it in python
- The complete documentation is in progress
API modifications
- Change name of kinematics algorithms: now forwardKinematics instead of previous geometry, kinematics and dynamics.
Minor
- SimpleHumanoid is now built with joint limits
- Handle floating joints in urdf parsing
- Slight separation between joints and body in Model to avoid confusion
- Internally, Motion and Force classes now use a 6D-vector instead of two 3D-vectors for linear and angular part
Bugs Fixed
- Fixed a bug when trying to merge a link with its parent in case of fixed joint. Now merge only if it has an inertial tag.
- All the algorithms are now set to inline
- Fix compilation errors
Installation
The source of the release are available in the file pinocchio-1.1.0.tar.gz just below along with a binary version for 64-bits Debian architecture of Pinocchio **pinocchio_1.1.0amd64.deb** and its dependencies. For information, those packages will be installed in _/opt/openrobots directory.
1.0.2 - 2015-09-14
Summary
New Features
- The limits in position, velocity and torque for joints Revolute and Prismatic are now parsed from urdf model and accessible
- Implementation of exp and log functions on SE3 in C++ with its python binding thanks to @aelkhour
- Data now contains information relative to the center of mass position, velocity and acceleration
- Add Lua parser - compatible with RBDL
- Add translational joint
- Add planar joint
Minor
- Reduction of compilation warnings.
Bugs Fixed
- Fixed bug in operator Y*S in JointRevoluteUnaligned
1.0.0 - 2015-04-03
The following algorithms are implemented. • Recursive Newton-Euler algorithm (RNEA, i.e inverse dynamics) • Composite Rigid Body algorithm (CRBA, i.e generalized inertia matrix) • Sparse Cholesky decomposition of the inertia matrix (for constrained forward-dynamics resolution) • Placement Jacobians (i.e application from configuration velocities to end-effector spatial velocities), along with computation of body placements, velocities and accelerations. • Center of mass and its Jacobian
The model can either be parsed from a URDF format or be created by appendending bodies. The following joint models are implemented. • Revolute X, Y, Z (optimized) and unaligned with Cartesian directions • Prismatic X, Y, Z • Spherical (with and withoug singularities) • FreeFlyer (i.e. no constraint, for mobile robots like humanoids – using quaternion representation for the rotation) • Fixed (concatenation of two consecutive bodies)
Wiki Tutorials
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pinocchio at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.3.1 |
| License | BSD-2 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stack-of-tasks/pinocchio.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-01-13 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Justin Carpentier
- Wolfgang Merkt
Authors
![]()
![]()
![]()
![]()
Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone’s algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
Pinocchio was first tailored for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.). It is built upon Eigen for linear algebra and FCL for collision detection. Pinocchio comes with a Python interface for fast code prototyping, directly accessible through Conda.
Pinocchio is now at the heart of various robotics software as Crocoddyl, an open-source and efficient Differential Dynamic Programming solver for robotics, the Stack-of-Tasks, an open-source and versatile hierarchical controller framework or the Humanoid Path Planner, open-source software for Motion and Manipulation Planning.
If you want to learn more about Pinocchio internal behaviors and main features, we invite you to read the related paper and the online documentation.
If you want to dive into Pinocchio directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
Table of contents
- Table of contents
- Introducing Pinocchio 3
- Pinocchio main features
- Documentation
- Examples
- Tutorials
- Pinocchio continuous integrations
- Performances
- Ongoing developments
- Installation
- Visualization
- Citing Pinocchio
- Questions and Issues
- Credits
- Open-source projects relying on Pinocchio
- Acknowledgments
Introducing Pinocchio 3
Pinocchio3 is the latest major release of Pinocchio. It comes with multiple new features, such as:
- Sparse constrained dynamics and its analytical derivatives
- Full support of closed-loop mechanisms
- State-of-the-art frictional contact solvers
- Low-complexity constrained articulated body algorithms
- Full support of multiple-precision floating-point (MPFR) in Python and C++
- Full CasADi support in Python and C++
- Increased support of CppAD and CppADCodeGen
- New SDF and MJCF parsers
- and much more.
Pinocchio main features
Pinocchio is fast:
- C++ template library,
- cache friendly,
- automatic code generation support is available via CppADCodeGen.
Pinocchio is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- support multiple precision arithmetic via Boost.Multiprecision or any similar framework,
- computations of kinematic and dynamic regressors for system identification and more,
- and much more with the support of modern and open-source Automatic Differentiation frameworks like CppAD or CasADi.
Pinocchio is flexible:
- header only,
- C++ 98/03/11/14/17/20 compliant.
Pinocchio is extensible. Pinocchio is multi-thread friendly. Pinocchio is reliable and extensively tested (unit-tests, simulations, and real-world robotics applications). Pinocchio is supported and tested on Windows, Mac OS X, Unix, and Linux (see build status here).
Documentation
The online Pinocchio documentation of the last release is available here. A cheat sheet pdf with the main functions and algorithms can be found here.
Examples
In the examples directory, we provide some basic examples of using Pinocchio in Python. Additional examples introducing Pinocchio are also available in the documentation.
Tutorials
Pinocchio comes with a large bunch of tutorials aiming at introducing the basic tools for robot control. Tutorial and training documents are listed here. You can also consider the interactive Jupyter notebook set of tutorials developed by Nicolas Mansard and Yann de Mont-Marin.
Pinocchio continuous integrations
Pinocchio is constantly tested for several platforms and distributions, as reported below:
| CI on ROS | |
| CI on Linux via APT | |
| CI on OSX via Conda | |
| CI on Windows via Conda | |
| CI on Linux via Robotpkg | |
Performances
Pinocchio exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, Pinocchio can unroll most of the computations directly at compile time, allowing to achieve impressive performances for a large range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical paper. In addition, the introspection may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
Ongoing developments
If you want to follow the current developments, you can directly refer to the devel branch. The master branch only contains the latest release. Any new Pull Request should then be submitted on the devel branch.
Installation
Pinocchio can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the installation procedure.
Conda
You simply need this simple line:
conda install pinocchio -c conda-forge
ROS
Pinocchio is also deployed on ROS. You may follow its deployment status below.
If you’re interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA. Here, you can install Pinocchio using:
sudo apt install ros-$ROS_DISTRO-pinocchio
This installs Pinocchio with HPP-FCL support and with Python bindings. You can then use Pinocchio in your ROS packages by:
- Depending on Pinocchio in your
package.xmlconfig (<depend>pinocchio</depend>) - Including Pinocchio via CMake (
find_package(pinocchio REQUIRED)) and linking against Pinocchio (target_link_libraries(my_library pinocchio::pinocchio))
We include support and hooks to discover the package for both ROS 1 and ROS 2. Examples can be found at the following repositories:
Please note that we always advise including the pinocchio/fwd.hpp header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 1 | ROS 2 | |||
|---|---|---|---|---|
| Melodic | Foxy | |||
| Noetic | Galactic | |||
| Humble | ||||
| Rolling |
Visualization
Pinocchio provides support for many open-source and free visualizers:
- Gepetto Viewer: a C++ viewer based on OpenSceneGraph with Python bindings and Blender export. See here for a C++ example on mixing Pinocchio and Gepetto Viewer.
- Meshcat: supporting visualization in Python and which can be embedded inside any browser.
- Panda3d: supporting visualization in Python and which can be embedded inside any browser.
- RViz: supporting visualization in Python and which can interact with other ROS packages.
Many external viewers can also be integrated. For more information, see the example here.
Citing Pinocchio
To cite Pinocchio in your academic research, please consider citing the software paper and use the following BibTeX entry:
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
And the following one for the link to the GitHub codebase:
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
Citing specific algorithmic contributions
Pinocchio goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning and control. Pinocchio provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc. If you use these algorithms, please consider citing them in your research articles.
- Le Lidec, Q., Montaut, L. & Carpentier, J. (2024, July). From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach. In RSS 2024-Robotics: Science and Systems.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). GJK++: Leveraging Acceleration Methods for Faster Collision Detection. IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). Constrained Articulated Body Dynamics Algorithms. Under review.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). Differentiable collision detection: a randomized smoothing approach. In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2023). Contact models in robotics: a comparative analysis. Under review.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). Collision Detection Accelerated: An Optimization Perspective. In Robotics: Science and Systems (RSS 2O22).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). Proximal and sparse resolution of constrained dynamic equations. In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018).
Questions and Issues
Do you have a question or an issue? You may either directly open a new question or a new issue or, directly contact us via the mailing list pinocchio@inria.fr.
Credits
The following people have been involved in the development of Pinocchio and are warmly thanked for their contributions:
- Justin Carpentier (Inria): main developer and manager of the project
- Nicolas Mansard (LAAS-CNRS): initial project instructor
- Guilhem Saurel (LAAS-CNRS): continuous integration and deployment
- Joseph Mirabel (Eureka Robotics): Lie groups and hpp-fcl implementation
- Antonio El Khoury (Wandercraft): bug fixes
- Gabriele Buondono (LAAS-CNRS): features extension, bug fixes, and Python bindings
- Florian Valenza (Astek): core developments and hpp-fcl support
- Wolfgang Merkt (University of Oxford): ROS integration and support
- Rohan Budhiraja (LAAS-CNRS): features extension
- Loïc Estève (Inria): Conda integration and support
- Igor Kalevatykh (Inria): Panda3d viewer support
- Matthieu Vigne (Wandercraft): MeshCat viewer support
- Robin Strudel (Inria): features extension
- François Keith (CEA): Windows support
- Sarah El Kazdadi (Inria): multi-precision arithmetic support
- Nicolas Torres Alberto (Inria): features extension
- Etienne Arlaud (Inria): RViz viewer support
- Wilson Jallet (LAAS-CNRS/Inria): extension of Python bindings
- Fabian Schramm (Inria): core developper
- Shubham Singh (UT Austin): second-order inverse dynamics derivatives
- Stéphane Caron (Inria): core developper
- Joris Vaillant (Inria): core developer and manager of the project
- Sebastian Castro (The AI Institute): MeshCat viewer feature extension
- Lev Kozlov: Kinetic and potential energy regressors
- Megane Millan (Inria): Features extension and core developer
- Simeon Nedelchev: Pseudo inertia and Log-Cholesky parametrization
- Ajay Sathya (Inria): core developer
If you have participated in the development of Pinocchio, please add your name and contribution to this list.
Open-source projects relying on Pinocchio
- Crocoddyl: A software to realize model predictive control for complex robotics platforms.
- TSID: A software that implements a Task Space Inverse Dynamics QP.
- HPP: A SDK that implements motion planners for humanoids and other robots.
- Jiminy: A simulator based on Pinocchio.
- ocs2: A toolbox for Optimal Control for Switched Systems (OCS2)
- TriFingerSimulation: TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- Casadi_Kin_Dyn: IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- PyRoboPlan: An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- ProxSuite-NLP: A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- Aligator: A versatile and efficient framework for constrained trajectory optimization.
- Simple: The Simple Simulator: Simulation Made Simple.
- LoIK: Low-Complexity Inverse Kinematics.
Acknowledgments
The development of Pinocchio is actively supported by the Gepetto team @LAAS-CNRS and the Willow team @INRIA.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Add parsing meshes with vertices for MJCF format (#2537)
Fixed
- Fix mjcf Euler angle parsing: use xyz as a default value for eulerseq compiler option (#2526)
- Fix variable naming in Python (#2530)
- Fix aba explicit template instantiation (#2541)
- CMake: fix RPATH on macos (#2546)
- Fix aba explicit template instantiation (#2541)
- Fix mjcf parsing of keyframe qpos with newlines (#2535)
- Fix sites parsing for MJCF format (#2548)
3.3.1 - 2024-12-13
Added
- Add
pinocchio_python_parsertarget (#2475)
Fixed
- Fix mjcf parsing of armature and of the default tag in models (#2477)
- Fix undefined behavior when using the site attribute in mjcf (#2477)
- Fix the type of image paths when loading textures in the meshcat visualizer (#2478)
- Fix meshcat examples ([#2503])[https://github.com/stack-of-tasks/pinocchio/pull/2503]
- Fix
pinocchio-test-cpp-parallel-geometrywhen built with Coal (#2502) - Fix scaling support for meshcat (#2511)
Changed
- On GNU/Linux and macOS, hide all symbols by default (#2469)
- Build
pinocchio_defaultwith collision features (#2517)
3.3.0 - 2024-11-06
Added
- Default visualizer can be changed with
PINOCCHIO_VIEWERenvironment variable (#2419) - Add more Python and C++ examples related to inverse kinematics with 3d tasks (#2428)
- Add parsing of equality/connect tag for closed-loop chains for MJCF format (#2413)
- Add compatibility with NumPy 2
__array__API (#2436) - Added argument to let users decide of root joint name when parsing models (urdf, mjcf, sdf) (#2402)
- Allow use of
pathlib.Path | strfor paths in python bindings (#2431) - Add Pseudo inertia and Log-cholesky parametrization (#2296)
- Add Pixi support (#2459)
Fixed
- Fix linkage of Boost.Serialization on Windows (#2400)
- Fix mjcf parser appending of inertias at root joint (#2403)
- Fix unit tests with GCC 13.3 (#2406
- Fix class abstract error for Rviz viewer (#2425)
- Fix compilation issue with MSCV and C++17 (#2437)
- Fix
pinocchio-test-py-robot_wrapperwhen building with SDF and collision support (#2437) - Fix crash when calling
Inertia::FromDynamicParametersin Python with wrong vector size (#2296) - Fix
examples/cassie-simulation.pyandexamples/talos-simulation.py(#2443) - Fix build with CppAd 2024 (#2459)
- Fix
pinocchio-test-cpp-mjcfunittest with Boost 1.86 (#2459) - Fix
pinocchio-test-cpp-constraint-variantsuninitialized values (#2459) - Fix mixing library symbols between Pinocchio scalar bindings (#2459)
- Fix bug for get{Joint,Frame}JacobianTimeVariation (#2466)
Changed
- Modernize python code base with ruff (#2418)
- Does not create a root_joint frame from parsed models (urdf, mjcf and sdf) when no root joint is provided (#2402)
3.2.0 - 2024-08-27
Fixed
- Append pinocchio optional libraries into pkg-config file (#2322)
- Fixed support of DAE meshes with MeshCat (#2331)
- Fixed pointer casts in urdf parser (#2339)
- Remove CMake CMP0167 warnings (#2347)
- Fixed urdfdom in ROS packaging (#2341)
- Fixed overview-urdf cpp example (#2384)
- Fixed mjcf model without a base link parsing (#2386)
- Fixed talos-simulation.py, simulation-contact-dynamics.py and simulation-closed-kinematic-chains.py examples (#2392)
Added
- Add getMotionAxis method to helical, prismatic, revolute and ubounded revolute joint (#2315)
- Add initial compatiblity with coal (coal needs
-DCOAL_BACKWARD_COMPATIBILITY_WITH_HPP_FCL=ON) (#2323) - Add compatibility with jrl-cmakemodules workspace (#2333)
- Add
collision_colorparameter toMeshcatVisualizer.loadViewerModel(#2350) - Add
BuildFromMJCFfunction to RobotWrapper (#2363) - Add more CasADi examples (#2388)
Removed
- Remove deprecated headers related to joint constraints (#2382)
Changed
- Use eigenpy to expose
GeometryObject::meshMaterialvariant (#2315) - GepettoViewer is no more the default viewer for RobotWrapper (#2331)
- Modernize python code base with ruff (#2367)
- Restructure CppAD and CasADi examples (#2388)
- Enhance and fix CppAD benchmarks outputs (#2393)
3.1.0 - 2024-07-04
Fixed
- Fix
appendModelwhen joints after the base are in parallel (#2295) - Fix
appendModelbuild when called with template arguments different than the ones fromcontext(#2284) - Fix
TransformRevoleTpl::rotationandTransformHelicalTpl::rotationbuild (#2284) - Fix compilation issue for Boost 1.85 (#2255)
- Fix python bindings of
contactInverseDynamics(#2263) - Deactivate
BUILD_WITH_LIBPYTHONwhen building with PyPy (#2274) - Fix Python bindings cross building with
hpp-fcl(#2288) - Fix build issue on Windows when a deprecated header is included (#2292)
- Fix build issue on Windows when building in Debug mode (#2292)
- Fix visualization of meshes in meshcat (#2294)
- Fix Anymal simulation test (#2299)
- Fix contact derivatives and impulse dynamics tests (#2300)
- Fix CMake compatibility with old console_bridge version (#2312)
Added
- Python unittest for
contactInverseDynamicsfunction (#2263) - Added helper functions to return operation count of CasADi functions. (#2275)
- C++ and Python unittest for
dIntegrateTransportto check vector transport and its inverse (#2273) - Add kinetic and potential energy regressors (#2282)
Removed
- Remove header
list.hppinclude for bindings of model and rnea (#2263)
3.0.0 - 2024-05-27
Added
Automatic differentiation
- Full support of Casadi in the main library by @jcarpent and @ManifoldFR
- Full support of Casadi for Python bindings by @jcarpent
- Full support of Boost.Multiprecision in the main library by @jcarpent
- Full support of Boost.Multiprecision for Python bindings by @jcarpent
- Full support of CppAD and CppADCodeGen in the main library by @jcarpent
- Full support of CppAD and CppADCodeGen for Python bindings by @jcarpent and @proyan
Core features
- Full support of constrained dynamical systems by @jcarpent
- Full support of derivatives of constrained dynamical systems by @jcarpent and @proyan
- Extended algorithms for constrained dynamics: constrained ABA, PV solvers, etc. by @jcarpent and @AjSat
- Add frictional contact solvers (PGS, ADMM) by @jcarpent
- Add contact inverse dynamics by @quentinll
- Full support of broadphase algorithms in Pinocchio by @jcarpent
- New joint supports (Helicoidal, Universal) by @fabinsch and @MegMll
- Add new algorithms for supporting Delassus factorizations for sparse, dense and tree-based systems by @jcarpent
- Add full OpenMP support for many algorithms (ABA, RNEA, collision detection, etc.) by @jcarpent
- Full support of GeometryModel, GeometryObject serialization by @jcarpent
- Extended support of Meshcat by @jcarpent, @ManifoldFR and @jorisv
- Extended testing and support of Lie groups operations by @jcarpent and @ManifoldFR
- Full support of AVX512 and AVX2 vectorization for Python bindings by @jcarpent
- Full support of the robot armature in RNEA, CRBA and ABA
- Extended formulation of CRBA and ABA using WORLD convention for reduced computational burden in the derivative algorithms
Parsers
Extra Algorithms
- Added reachable workspace computation and vizualisation in collaboration with @askuric based on pycapacity by @MegMll and @jorisv
Packaging
- Full support of template instantiation by @fabinsch and @jorisv
- Enhance support for Windows-based systems by @jorisv
- Splitting of the Pinocchio into sub-library for isolation by @jorisv
Compatibility
- Add
PINOCCHIO_ENABLE_COMPATIBILITY_WITH_VERSION_2define to activate compatibility with Pinocchio 2 API
Changed
C++
- Change minimum required version of C++ to C++11. Check for compatibility here: https://en.cppreference.com/w/cpp/compiler_support/11
- Replace
pinocchio::BiasZeroTplbypinocchio::MotionZeroTpl - Replace
pinocchio::fusion::JointVisitorBasebypinocchio::fusion::JointUnaryVisitorBase - Replace
pinocchio::fusion::push_frontbypinocchio::fusion::append - Replace
pinocchio::regressor::computeStaticRegressorbypinocchio::computeStaticRegressor - Replace
pinocchio::jointJacobianbypinocchio::computeJointJacobian - Replace
pinocchio::frameJacobianbypinocchio::computeFrameJacobian - Replace
pinocchio::framesForwardKinematicsbypinocchio::updateFramePlacements - Replace
pinocchio::kineticEnergybypinocchio::computeKineticEnergy - Replace
pinocchio::potentialEnergybypinocchio::computePotentialEnergy - Replace
pinocchio::computeCentroidalDynamicsbypinocchio::computeCentroidalMomentumandpinocchio::computeCentroidalMomentumTimeVariation - Replace
pinocchio::centerOfMass(const ModelTpl&, DataTpl&, int, bool)bypinocchio::centerOfMass(const ModelTpl&, DataTpl&, KinematicLevel, bool) - Replace
pinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, int)bypinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, KinematicLevel) - Replace
pinocchio/algorithm/dynamics.hppbypinocchio/algorithm/constrained-dynamics.hpp - Change the order of arguments in some of
pinocchio::GeometryObject’s constructors - Deprecate
pinocchio/algorithm/parallel/geometry.hppmoved atpinocchio/collision/parallel/geometry.hpp - Deprecate
pinocchio/spatial/fcl-pinocchio-conversions.hppmoved atpinocchio/collision/fcl-pinocchio-conversions.hpp - Deprecate
pinocchio/parsers/sample-models.hppmoved atpinocchio/multibody/sample-models.hpp - Deprecate
pinocchio/math/cppad.hppmoved atpinocchio/autodiff/cppad.hpp - Deprecate
pinocchio/math/cppadcg.hppmoved atpinocchio/autodiff/cppadcg.hpp - Deprecate
pinocchio/math/casadi.hppmoved atpinocchio/autodiff/casadi.hpp - Deprecate
pinocchio::FrameTpl::parentreplaced bypinocchio::FrameTpl::parentJoint - Deprecate
pinocchio::FrameTpl::previousFramereplaced bypinocchio::FrameTpl::parentFrame - Deprecate
pinocchio/algorithm/contact-dynamics.hppalgorithms replaced bypinocchio/algorithm/constrained-dynamics.hpp
Python
- Replace
pinocchio.utils.skewbypinocchio.skew - Replace
pinocchio.utils.se3ToXYZQUATbypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.utils.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.robot_wrapper.RobotWrapper.frameClassicAccelerationbypinocchio.robot_wrapper.RobotWrapper.frameClassicalAcceleration - Replace
pinocchio.robot_wrapper.RobotWrapper.jointJacobianbypinocchio.robot_wrapper.RobotWrapper.computeJointJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.frameJacobianbypinocchio.robot_wrapper.RobotWrapper.computeFrameJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.initDisplaybypinocchio.robot_wrapper.RobotWrapper.initViewer - Replace
pinocchio.robot_wrapper.RobotWrapper.loadDisplayModelbypinocchio.robot_wrapper.RobotWrapper.loadViewerModel - Replace
pinocchio.deprecated.se3ToXYZQUATtuplebypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.deprecated.se3ToXYZQUATbypinocchio.SE3ToXYZQUAT - Replace
pinocchio.deprecated.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.deprecated.buildGeomFromUrdf(model, filename, [str])bypinocchio.buildGeomFromUrdf(model, filename, type, package_dirs, mesh_loader) - Replace
pinocchio.rpy.npToTTuplebypinocchio.utils.npToTTuple - Replace
pinocchio.rpy.npToTuplebypinocchio.utils.npToTuple - Replace
pinocchio.jacobianSubtreeCoMJacobianbypinocchio.jacobianSubtreeCenterOfMass
Removed
C++
- Remove
pinocchio::setGeometryMeshScales - Remove some
pinocchio::forwardDynamicssignatures - Remove some
pinocchio::impulseDynamicssignatures
Python
- Remove
pinocchio.utils.cross - Remove
pinocchio.robot_wrapper.RobotWrapper.initMeshcatDisplay - Remove
pinocchio.deprecated.setGeometryMeshScalesbypinocchio
2.7.1 - 2024-04-26
Changed
- Modify algorithm that appends a model to another (#2218)
- Set NOMINMAX as a public definitions on Windows (#2139)
- Improve documentation of
enum ReferenceFrame(#2190) - Improve documentation of
getJointJacobian(#2193).
Fixed
- CMake now uses Relative Path instead of Absolute (#2202)
- Order of frames in
ReducedModelis now the same as in the full model (#2160) - Remove a lot of warnings (#2139)
-
MeshcatVisualizerdoesn’t crash anymore when there is no collision model defined (#2147) - Fix MSVC build (#2155)
- Fix stub generation (#2166)
- Clean up empty documentation pages and sections (#2167)
- Fix SO(3) title and cross-section reference in the documentation (#2210)
Added
- Add
examples/floating-base-velocity-viewer.pyto visualize floating base velocity (#2143) - Add remark to the documentation of
getFrame(Classical)Accelerationfunctions (#2169) - Allow use of installed jrl-cmakemodules (#2216)
2.7.0 - 2024-01-23
Added
- Add
GeometryObject::meshMaterialattribute (#2084) - Add Parser for mujoco mjcf models
pinocchio::mjcf::buildModelandpinocchio::mjcf::buildGeom
Fixed
- Use bp::ssize_t for recent version of Windows compilers (#2102)
- Fix missing include for Boost >= 1.83 (#2103)
- Remove f-strings to fix install with python 2 (#2110)
- CMake: stop exporting CppAd/cppadcodegen & fetch submodule if not available (#2112)
- Fix malloc issue in CRBA algo (#2126)
- Fix build cppad and cppadcg with Boost < 1.77 (#2132)
2.6.21 - 2023-11-27
Added
- Add inverse dynamics (
rnea) Python and C++ example (#2083) - Add visualization of Frames in MeshCat viewer (#2098)
Fixed
- Re-initialize
Ycrb[0]incrbaMinimal(#2040) - Fix custom scalar use in
logfunction (#2047) - Raise exception on wrong input size in
XYZQUATToSE3Python binding function (#2073) - Remove memory leak in
buildGeomFromUrdfandbuildGeomFromUrdfStringPython binding functions (#2082https://github.com/stack-of-tasks/pinocchio/pull/2082) - Fix Panda3D viewer examples (#2087)
- Fix centroidal dynamics derivatives with respect to time (#2094))
Changed
- Rename freeflyer_joint to root_joint in
humanoidsample model (#2043) - CMake minimal version is now 3.10 (#2055)
- Split headers and sources in different directories to have a more standard C++ project (#2070)
Removed
- Remove support to
hpp-fcl< v2.0.0 (#2086)
2.6.20 - 2023-08-09
What’s Changed
- Fix support of recent versions of Boost for CppAD and CppADCodeGen by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2000
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 1e0c5aff1147d50d58bf4185a55ff564c9b6e027 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2007
- Enabled copy and deepcopy by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1882
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 9f963f67ebb889792175776c5ee00134d7bb569b by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2013
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2029
2.6.19 - 2023-06-19
What’s Changed
- Add Motion::toHomogeneousMatrix by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1946
- The insatiable English teacher PR 🧙 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1957
- require C++14 for Boost >= 1.81 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1949
- CMake: an example require python 3 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1966
- Fix IK example in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1963
- Issue templates by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1971
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1976
- Enhance CMake packaging for Windows by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1984
- Documentation by @drewhamiltonasdf in https://github.com/stack-of-tasks/pinocchio/pull/1986
- Add support for ccache on Conda build by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1987
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1988
- Enhance compatibility with new Python versions by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1996
New Contributors
- @drewhamiltonasdf made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1986
2.6.18 - 2023-04-29
What’s Changed
- Support force in pybind11 by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1868
- Fix some Python bindings signatures and add stub generation. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1869
- Fix IK example by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1875
- Remove empty examples by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1878
- build(deps): bump ros-industrial/industrial_ci from 6a8f546cbd31fbd5c9f77e3409265c8b39abc3d6 to 4b78602d67127a63dce62926769d9ec4e2ce72e4 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1890
- add static-contact-dynamics example by @PepMS in https://github.com/stack-of-tasks/pinocchio/pull/1891
- Update documentation of
JointModel.shortnamein python bindings by @Danfoa in https://github.com/stack-of-tasks/pinocchio/pull/1892 - update doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1898
- Document that joints need to be added in depth-first order by @traversaro in https://github.com/stack-of-tasks/pinocchio/pull/1899
- fix INSTALL_RPATH on ROS & OSX by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1908
- Python example: update joint placements after loading a URDF by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1911
- Remove more empty sections from the docs by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1912
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1914
- update doc for fixed joint by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1920
- doc: more information about frames on cheatsheet by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1930
- Define operational frames in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1929
- Remove support of np.matrix by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1941
- Fix other np.matrix issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1942
New Contributors
- @PepMS made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1891
- @Danfoa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1892
2.6.17 - 2023-02-15
What’s Changed
- Fix Jlog6 documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1857
- Add documentation to Jlog3 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1858
- [python/visualize] Extend visualizer features and implement them for MeshcatVisualizer by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1845
- Second-order RNEA derivatives by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1860
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1863
- Fix support of AVX2. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1865
2.6.16 - 2023-02-02
What’s Changed
- Enforce testing of Python bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1853
- Fix issue with Python 3.6 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1855
2.6.15 - 2023-01-31
What’s Changed
- More documentation for getJointJacobian by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1836
- Error when integrating SE3 with the same vector given as input and output by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1775
- Documentation for Jlog6 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1842
- remove useless header by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1846
- Fix issue with recent change on master branch for ROS-CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1847
- Fix issue with old version of Boost and eigenpy >= 2.9.0 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1851
2.6.14 - 2023-01-13
What’s Changed
- Fix registration of ptr to Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1832
2.6.13 - 2023-01-12
What’s Changed
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1790
- Skip collision pairs between geom on same joint in appendGeometryModel by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1791
- Fix issue with Boost 1.78 on OSX systems by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1792
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1793
- Add helper functions for computing supported inertia and force by frames by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1796
- Follow-up : Supported inertia by frame by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1797
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1799
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1801
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1802
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1809
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1811
- Fix Python issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1821
- Allow to use std::shared_ptr by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1822
2.6.12 - 2022-11-06
What’s Changed
- Elevate check for ambiguous input argument to an exception by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1781
- Fix packaging issues + sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1782
- Fix issue with clang by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1784
2.6.11 - 2022-10-25
What’s Changed
- URDF: fix loading relative mesh path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1748
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1750
- Add @note to difference documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1753
- Configuration limits for joints and model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1756
- Address remaining warnings + speed-up build for BUILD_TESTING=OFF by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1764
- Add status of ROS builds to README by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1770
- pinocchio/visualize: Add support for cone shape in meshcat dispaly by @whtqh in https://github.com/stack-of-tasks/pinocchio/pull/1769
- Updates README by @nikoandpiko in https://github.com/stack-of-tasks/pinocchio/pull/1776
- Enhance cmake packaging by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1777
New Contributors
- @stephane-caron made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1753
- @whtqh made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1769
- @nikoandpiko made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1776
2.6.10 - 2022-09-14
What’s Changed
- fix syntax for python 2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1734
- Expose
removeGeometryObjectin python binding by @Jiayuan-Gu in https://github.com/stack-of-tasks/pinocchio/pull/1736 - Fix relocalable by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1738
- Fix relative path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1742
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1744
New Contributors
- @Jiayuan-Gu made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1736
2.6.9 - 2022-08-12
What’s Changed
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1669
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1670
- Sync example-robot-data by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1671
- update to pybind11 v2.9.2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1674
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1678
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1677
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1679
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1692
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1691
- Fix bug in appendModel by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1693
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1695
- Fix geometry color default value by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1699
- Add python example appending Urdf and another model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1698
- SO3 diff impl use quaternion instead of rotation matrix by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1702
- add cheat sheet to doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1705
- cmake/utils: no need for python here by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1709
- Add header only target by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1712
- cmake: relocatable package for recent CMake versions by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1716
- cmake: modernize header-only lib by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1718
- ROS2/Colcon integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1719
- CMake: update to eigenpy 2.7.10 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1720
- Fix weird test failure on Conda by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1723
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1727
- ROS2 release support by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1681
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1732
New Contributors
- @fabinsch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1698
2.6.8 - 2022-06-06
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1648
- Fix integrate method for SO2 by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1652
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1653
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1658
- Extend current Coriolis computations to account for Cristoffel symbol of first kind by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1665
- Fix method play() of rviz_visualizer by @danielcostanzi18 in https://github.com/stack-of-tasks/pinocchio/pull/1667
- chore: Included githubactions in the dependabot config by @nathannaveen in https://github.com/stack-of-tasks/pinocchio/pull/1659
- Enable ubuntu 22.04 on CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1668
New Contributors
- @pre-commit-ci made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1648
- @Toefinder made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1652
- @danielcostanzi18 made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1667
- @nathannaveen made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1659
2.6.7 - 2022-05-03
What’s Changed
- add dummy .pre-commit-config.yaml by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1629
- Avoid triggering multi-line comment in Latex formula by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1630
- Make Pinocchio v2 compatible with HPP-FCL v2 by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1631
- Add example of collision with a point cloud by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1636
- follow up on hpp-fcl v2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1637
- Fix pickling for Boost >= 1.7.4 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1640
2.6.6 - 2022-03-22
What’s Changed
- Support HPP-FCL for ROS binaries & introduce ROS2 ament integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1622
2.6.5 - 2022-02-14
What’s Changed
- Fix warning issue in Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1546
- RVizVisualizer update by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1549
- Correct link to examples. Removed python subdirectory in the link as the directory does not exist anymore by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1561
- Add CONTRIBUTING.md file for newcomers by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1563
- Add list of projects based on Pinocchio by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1566
- Fix constrained dynamics formula by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1567
- Append “/share” to AMENT_PREFIX_PATH by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1568
- Expose dIntegrateTransport by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1572
- [timings] Reduce allocations in finite-difference baselines by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1583
- [computeAllTerms] Add missing noalias to avoid temporary allocation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1582
- Missing
noaliasby @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1585 - [multibody/model] add joint arg validation by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1586
- [multibody/geometry] Add method to remove an object. by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1588
- Fix bug in ABAChecker by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1599
- Update README.md by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1604
- allow
robot_wrapperto share data with itsvizby @vnghia in https://github.com/stack-of-tasks/pinocchio/pull/1606
New Contributors
- @duburcqa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1585
- @vnghia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1606
2.6.4 - 2021-11-02
What’s Changed
- Change ‘typedef’ to ‘using’, add curly braces by @the-raspberry-pi-guy in https://github.com/stack-of-tasks/pinocchio/pull/1476
- [CMake] set INSTALL_RPATH for python on linux by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1482
- [visualize] captureImage() method by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1480
- ci: update ROS CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1483
- Fix issue with Pool when FCL is missing by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1485
- fix module name by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1487
- Add RVizVisualizer by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1488
- fix reshape issues by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1489
- Remove useless reference to L-GPL + remove of useless files by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1500
- Update old function, remove mobile robot wrapper by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1490
- Allows the display of {COLLISION,VISUAL} in MeshCat by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1502
- Delete submodule travis by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1509
- Add citation by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1511
- badges: add PyPI by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1510
- Add support of Convex within MeshCat + improve GeometryObject bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1530
- [python] Fix BaseVisualizer constructor. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1533
- [python] Add pybind11 header. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1519
- make copy of supports during model cast by @rubengrandia in https://github.com/stack-of-tasks/pinocchio/pull/1536
- [python] Simplify buildGeomFromUrdf and allow to build from string. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1538
- Sync submodule by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1542
- Turn off automatic documentation generation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1541
New Contributors
- @the-raspberry-pi-guy made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1476
- @ManifoldFR made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1480
- @EtienneAr made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1488
- @kozakromch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1489
- @rubengrandia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1536
2.6.3 - 2021-07-27
This new release fixes bugs in MeshCat rendering, loading of ROS path and in the Centroidal dynamics derivatives
2.6.2 - 2021-07-05
This new release provides fixes include orders in the unit tests due to recent versions of Boost. It also provides more content to the Readme. This new release prefigures the new Pinocchio 3.x
2.6.1 - 2021-06-08
Enhancement:
- extended support of serialization of FCL primitives
- extended support of Boost.Variant in Python
Fixes:
- fix bug when loading URDF on Windows
- fix handling of Frame inertia
2.6.0 - 2021-04-11
This new release provides:
- improvement for handling collision/distance requests
- support of parallel computations for ABA, RNEA and collisions algorithms (more to come soon)
- additional features for the RobotWrapper in Python
- support of Capsule for Meshcat
- happened Inertia information to Frames
- fixes for doc issues
- improve numerical robustness when two inertias are Zero
2.5.6 - 2021-01-23
This new release comes with a more consistent ABA algorithm (data.a_gf used instead of classic data.a) and more outcomes for computeAllTerms. In addition, it provides some extended supports to PyPy.
2.5.5 - 2021-01-07
This maintenance release enhances the whole CMake packaging of the project and provides additional features for the Python bindings.
2.5.4 - 2020-11-26
This new release enhances the compatibility of Pinocchio with former distributions, provides better support to Euler angles and fixes some bugs.
2.5.3 - 2020-11-13
This new release fixes some issues with the Python bindings, add new examples and extend the whole tests.
2.5.2 - 2020-11-02
This new release enhances the compatibility with Windows, provides new tools eitheir to work on joint configurations and also to compute the kinematic regressors.
2.5.1 - 2020-10-12
This new release provides:
- improvements on the whole project coverage
- better support of Windows v142
- support of joint friction and damping (only at the interface level)
- new algorithm to retrieve the Coriolis matrix from RNEA/ABA derivatives
2.5.0 - 2020-08-31
In this new release, we have:
- a full memory shared in the Python bindings, i.e. that all the Eigen object can now be changed in Python.
- better handling of multiprecision arithmetic
- improved CMake packaging
- fix for Autodiff
2.4.7 - 2020-07-20
This new release provides:
- an extended API for dealing with Lie groups and the related computations (integration, difference, derivatives, etc.)
- the Lie groups have now their Python bindings for easy code prototyping
- the kinematics derivatives of the Frames have been introduced as well as the extension of current Joints derivatives
- the packaging of the project has been improved too.
2.4.6 - 2020-06-15
This new release of Pinocchio removes the use of pkg-config to check dependencies and provides a full compatibility and support for Windows systems.
2.4.5 - 2020-05-23
This new release extends the current frames algorithms to also consider the LOCAL_WORLD_ALIGNED reference frame. It also exposes the values of the enum_ for simplified usage.
2.4.4 - 2020-05-13
This new release provides:
- new helpers function to retrieve frame velocities and accelerations
- for each collision pair, it is now possible to provide specific collision checking settings
- support to display convex hulls in viewers
It also fixes:
- the support of Panda3d
and enhances the global CMake packaging of the project.
2.4.3 - 2020-04-24
This new release provides a new Viewer, named Panda3d, for easy code visualization in Python. It also provides additional fixes to the Code Generation support.
2.4.2 - 2020-04-21
This new release of Pinocchio provides new features for dealing with Lie groups:
- improved operations over the differential operations of the integrate function
- new functions for transporting some matrix between the two endpoints of the integrate function
- the RPY functions are now robust over singularities
- the support of autodiff frameworks has been improved to also cope with Lie groups features
This release also provides:
- a packaging fixe with respect to the URDFDOM dependency
- the Python bindings should now be without memory leak
2.4.1 - 2020-04-15
This new release fixes a bug introduced in Pinocchio 2.4.0 concerning the method ModelTpl::addFrame. This release also provides better support for the checking of the CppAD and CppADCodeGen versions.
2.4.0 - 2020-04-09
This new release of Pinocchio makes several improvements:
- improve compatibility with hpp-fcl
- improve compatibility with CppAD and notably the Lie algebra features
- a better CMake >= 3.0 export of the project
- new examples for Code generation
- improved Python bindings
- improved support for Boost.Multiprecision
- reduce the memory usage when compilation unit tests
and we have started to move some dependencies like urdfdom to the pinocchio.so library to avoid additional compilations issues and to useless compilations burden.
2.3.1 - 2020-02-20
This new release provides:
- some fixes with respect to minor bugs introduced in Pinocchio 2.3.0
- an enhance detection of Python
- improves the compilation memory overhead
2.3.0 - 2020-02-18
This new release provides:
- full compatibility with CMake export
- full compatibility with Numpy.Array
- examples for Code generation
- better support of C++11
- minor bug fixes
- improves coverage
- uniformizes function signature
- improves interoperability between Numpy and Pinocchio
- add many examples
- full integration of Python bindings of hpp-fcl
- supports the pickling and the serialization of Data
2.2.3 - 2019-12-30
This new release provides:
- pickling and serialization of Data structures
- provide new algorithms to create reduce models
It also improves the compatibility with the Transform used in HPP-FCL. It also fixes various bugs. It also comes with new and detailed examples.
2.2.2 - 2019-12-11
This new release:
- improves the compatibility with HPP-FCL bindings
- improves the documentation of the project with more examples
- fixes some bugs related to Eigen
- add new algorithms to compute the centroidal matrix and its time derivatives
2.2.1 - 2019-11-25
This new release fixes the ROS package version number and updates the robot models.
2.2.0 - 2019-11-25
This new release of Pinocchio introduces:
- analytical formula for Hessian of the kinematics
- derivatives of the difference operation
- new derivatives for static torque quantity
- new models for tests and examples.
It adds some signature non-exposed in Python. It also deletes outdated function signatures that have been deprecated in 2.0.x versions. It also improves the packaging with respect to ROS or other robotics frameworks.
2.1.11 - 2019-10-27
This release fixes missing update of the ROS package.xml file with the new version.
2.1.10 - 2019-10-25
This new release allows throwing when some input arguments are not fulfilled (useful feature in Python). It also provides new support for Hessian of the kinematics. Finally, the project is now packaged for ROS integration.
2.1.9 - 2019-10-09
This is a maintenance release, with some fixes concerning the contact dynamics, better support of LOCAL_WORLD_ALIGNED option and fixes with respect to some recent versions of CppADCodeGen.
2.1.8 - 2019-09-30
This is a maintenance release providing several fixes:
- remove memory allocation in ABA derivatives with contact forces
- better handling of boost::Variant
- better support of Majax
It also provides new features in the documentation of mathematical formula.
2.1.7 - 2019-09-10
This new release improves:
- the support of AutoDiff frameworks
- the efficiency of some core algorithms
fixes:
- the support of Majax
- the compatibility with Python 2/3
2.1.6 - 2019-08-05
This new release improves the packaging of the project and provides new algorithms to compute the Jacobians of the center of mass of each subtree.
2.1.5 - 2019-07-16
This new release provides support for JointMimic and JointRevoluteUnboundedUnaligned. It also comes with the full support of CasADi.
Thanks to @mkatliar for helping us to provide this support.
2.1.4 - 2019-06-22
This new release provides some fixes with respect to Python bindings, C++17 as well as new important features:
- dynamic regressor for identification
- add support of multiple viewers
- improve analytical derivatives
2.1.3 - 2019-04-30
This new release fixes some issues with Python 3 and C++17 standard. It also provides additional documentation, enlarges the current Python bindings and uniformizes naming convention in Python.
2.1.2 - 2019-04-05
This new release aims at fixing compilations issues when COLLISION module is activated. It also provides some fixes concerning the loading of meshes.
A new feature provided by this release concerns the possibility of appending two models together.
2.1.1 - 2019-03-27
This new release fixes compatibility bugs with previous release 2.1.0. It also provides a serialization interface for Spatial classes and the Model class.
2.1.0 - 2019-02-27
This new release makes some major improvements:
- it is now possible to use MeshCat, another viewer working in the browser directly in Python
- the Python bindings are now hardly tested and uniformized with respect to the C++ API
- this new release is compatible with recent releases of
hpp-fcl - the SRDF parsing has been improved. Its now possible to load several reference configuration vectors
We also fixed bugs related to recent versions of Boost mostly.
2.0.0 - 2019-01-11
Welcome Pinocchio 2.0.0.
This release makes official the last important and new features for efficiently computing the dynamics of the rigid body systems:
- Analytical derivatives
- Automatic differentiation
- Full scalar type overloading
- Code generation among others
1.3.3 - 2018-10-29
This is for real the last release before Pinocchio 2.0.0 and more.
This release fixes the packaging when hpp-fcl is missing. Thanks to @aelkhour for raising this issue.
1.3.2 - 2018-10-26
This release is the last one before Pinocchio 2.0.0.
It mostly:
- fixes issues introduced by new API of frame functionalities;
- introduces new sample models for manipulator and humanoid systems;
- fixes bugs due to boost 1.58.0;
- improve the readme with credits section.
1.3.1 - 2018-09-25
This new release corrects some bugs or bad deprecations concerning Pinocchio 1.3.0.
1.3.0 - 2018-08-28
This new release introduces analytical derivatives in the corpus of Pinocchio. This feature is still under development but can already be used both in C++ and Python.
This new release also fixes a bunch of bugs related to Eigen and Boost.
1.2.9 - 2018-06-01
This is mostly a maintenance release:
- Fix bug in. lower bounds in Model class
- Update documentation structure (additional work is needed)
- Improve the compatibility with Python 3.x
1.2.8 - 2018-05-18
This is mostly a maintenance release:
- Fix some bugs in JointModel{Translation,Spherical} for ABA algorithm
- Fix a duplication issue in RobotWrapper
- Improve compatibility with recent version of Boost >= 1.67.0
- Romeo is now loaded from the official romeo_description repository
1.2.7 - 2018-04-03
This is mostly a maintenance release:
- Fixes and computation improvements for Lie group operations.
- Adding pickle for spatial classes.
- Allow loading of URDF tree directly from an XML stream.
1.2.6 - 2018-01-15
This is mostly a maintenance release with various fixes to comply with Boost variadic macro on recent OS. It also adds new convention with a LOCAL and a WORLD frame to express Jacobian quantities.
1.2.5 - 2017-10-10
This a maintenance Release. We added some algo to compute the time variation of the Jacobians together with the variation with respect to time of the centroidal momemtum matrix. HPP-FCL works now with Eigen for linear algebra.
1.2.4 - 2017-06-09
This is mostly a maintenance release, with some fix with respect new urdfdom versions, it handles Eigen support with hpp-fcl.
1.2.3 - 2017-02-14
This release fixes some issues with respect to 1.2.1.
API modifications
Interpolate, Differentiate, Integrate are now algorithmic struct which can be efficiently overloaded.
Bindings
Add FCL object bindings
1.2.1 - 2016-10-17
Summary
This release is a minor patch of the previous release 1.2.0.
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New
- The Python bindings are aligned and free of unnecessary allocations
- Add documentation option which allows to not install the documentation
- Introduces container::aligned_vector to automatically create an std::vector with specific aligned allocator
API modifications
- Remove JointDense.
- Remove JointGeneric
Fixes
- Solves the parsing of geometries in URDF module
- Fixes alignment issues on 32 bits architecture
1.2.0 - 2016-09-29
Summary
The main modifications concern the update of the code to comply with the Humanoid Path Planner (HPP).
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Add Joint{Model,Data} classes based on Joint{Model,Data}Base and Joint{Model,Data}Variant. Those classes call directly the visitors and make Variant accessible throw methods
- Add partial Joint{Model,Data}Composite. They allow a stack of joints without adding any Inertia.
- Increase Frame class. Frames can be of several types (BODY, JOINT, SENSOR, etc) and reflect the robot tree as it appears in the URDF conventions. Frames have two attributes: parent which the direct Joint parent in the Joint tree, previousFrame which correspond to the parent Frame in the tree of Frames).
- Adding Python parser which is able to read models written in Python.
- Add algo checker to check the validity of a model.
- Improve documentation.
API modifications
- Model has some methods deprecated. The default name has been removed.
- The Geometry classes have been updated and several methods have been set to deprecated. They now use Frames as parent instead of Joint directly: a Geometry is now supported by a BODY.
- Add active collision pair flags in GeomData which define the active collision pairs.
- Unify naming conventions (nframes, njoints, etc).
Fixes
- The UDRF parser can now deal with more complex topologies. It properly handles the stack of geometries for each BODY.
- Improve packaging mainly around the Python part.
1.1.2 - 2016-05-31
Summary
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Added operational frames (that are a Plucker coordinate frame attached to a parent joint inside a kinematic tree). Position and Jacobian of such frames can be computed
- Geometry primitives can now be handled (and added to the Pinocchio GeometryModel) when encountered in an urdf file
- Implemented simple srdf parsing for GeometryData : parse the desactivated collision pairs
- Added Articulated Body Algorithm (ABA), and CCRBA
- When parsing a urdf file, now look in the environment variable ROS_PACKAGE_PATH for directories where to search for meshes. Users can provide hint directories to search in as a priority. Updated python RobotWrapper consequently
- Added forward dynamics with contact algorithm
- Added algorithms working with vectors of configuration or velocity(either on a JointModel or on a Model, iterating through all the kinematic tree)
- One can integrate a configuration at a constant velocity during a unit time
- One can differentiate two configurations (i.e compute the velocity that must be integrated during a unit time to go from first configuration to the other )
- One can interpolate between two configurations
- One cancompute the distance between two configurations ( such as dist = norm ( difference) )
- One can shoot a configuration uniformly sampled between specified limits
- Added Impulse Dynamic Algorithm
- Completed the list of method to access or call Joint’s data or method when joint are stored in a variant.
- Added JointAccessor that is a general joint encapsulating a JointVariant ( abstracting the use of visitors for the user).
API modifications
- Moved limits from joint models to Model as vectors of size nq for position limits and size nv for velocity and effort limits
- The Geometry objects stored in GeometryModel are now splitted in two types : visual and collision
Minor
- Improved documentation of Data, Model, Spatial Classes
- Improved efficiency when executing algorithms
- One can now create Inertia for simple shapes such as cylinders, boxes, ellipsoid
- Rework some unittests to increase to coverage of whole package ( C++ and Python )
Bugs Fixed
- Fixed operator Inertia x constraint in JointSphericalZYX
- Fixed the Dense conversion of joints (models and datas)
- Fixed bugs in JointRevoluteUnaligned and JointPrismaticUnaligned to access the access when visiting a variant containing such joints with boost::fusion
1.1.0 - 2016-02-04
Summary
New Features
- Spatial classes now follow the CRTP Design Pattern, for performance reasons.
- JointModels are now exposed in Python. This feature enables one to load a URDF model with a precise root joint and to create his/her own model.
- Python models can now be created by hand ( ex: buildEmptyModel() + calls to addBody() )
- Added utility tools to check an urdf model ( same as check_urdf but dislpay the Pinocchio model created from urdf parsing)
- Add unaligned prismatic joint
- Add geometry through Flexible Collision Library (hpp-fcl)
- Add dedicated structs to handle geometry. GeometryModel (list of geometry objects and its relation wrt kinematic model) and GeometryData
- When parsing urdf, meshes can be read from collada files and handled in Pinocchio
- Created parser that handles geometry and exposed it in python
- Add algorithms to update the geometry kinematics, to compute the distances for pairs of collision or if they are colliding or not.
- Added algorithms to compute the kinetic energy, the potential energy and exposed it in python
- The complete documentation is in progress
API modifications
- Change name of kinematics algorithms: now forwardKinematics instead of previous geometry, kinematics and dynamics.
Minor
- SimpleHumanoid is now built with joint limits
- Handle floating joints in urdf parsing
- Slight separation between joints and body in Model to avoid confusion
- Internally, Motion and Force classes now use a 6D-vector instead of two 3D-vectors for linear and angular part
Bugs Fixed
- Fixed a bug when trying to merge a link with its parent in case of fixed joint. Now merge only if it has an inertial tag.
- All the algorithms are now set to inline
- Fix compilation errors
Installation
The source of the release are available in the file pinocchio-1.1.0.tar.gz just below along with a binary version for 64-bits Debian architecture of Pinocchio **pinocchio_1.1.0amd64.deb** and its dependencies. For information, those packages will be installed in _/opt/openrobots directory.
1.0.2 - 2015-09-14
Summary
New Features
- The limits in position, velocity and torque for joints Revolute and Prismatic are now parsed from urdf model and accessible
- Implementation of exp and log functions on SE3 in C++ with its python binding thanks to @aelkhour
- Data now contains information relative to the center of mass position, velocity and acceleration
- Add Lua parser - compatible with RBDL
- Add translational joint
- Add planar joint
Minor
- Reduction of compilation warnings.
Bugs Fixed
- Fixed bug in operator Y*S in JointRevoluteUnaligned
1.0.0 - 2015-04-03
The following algorithms are implemented. • Recursive Newton-Euler algorithm (RNEA, i.e inverse dynamics) • Composite Rigid Body algorithm (CRBA, i.e generalized inertia matrix) • Sparse Cholesky decomposition of the inertia matrix (for constrained forward-dynamics resolution) • Placement Jacobians (i.e application from configuration velocities to end-effector spatial velocities), along with computation of body placements, velocities and accelerations. • Center of mass and its Jacobian
The model can either be parsed from a URDF format or be created by appendending bodies. The following joint models are implemented. • Revolute X, Y, Z (optimized) and unaligned with Cartesian directions • Prismatic X, Y, Z • Spherical (with and withoug singularities) • FreeFlyer (i.e. no constraint, for mobile robots like humanoids – using quaternion representation for the rotation) • Fixed (concatenation of two consecutive bodies)
Wiki Tutorials
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pinocchio at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.3.1 |
| License | BSD-2 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stack-of-tasks/pinocchio.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-01-13 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Justin Carpentier
- Wolfgang Merkt
Authors
![]()
![]()
![]()
![]()
Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone’s algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
Pinocchio was first tailored for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.). It is built upon Eigen for linear algebra and FCL for collision detection. Pinocchio comes with a Python interface for fast code prototyping, directly accessible through Conda.
Pinocchio is now at the heart of various robotics software as Crocoddyl, an open-source and efficient Differential Dynamic Programming solver for robotics, the Stack-of-Tasks, an open-source and versatile hierarchical controller framework or the Humanoid Path Planner, open-source software for Motion and Manipulation Planning.
If you want to learn more about Pinocchio internal behaviors and main features, we invite you to read the related paper and the online documentation.
If you want to dive into Pinocchio directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
Table of contents
- Table of contents
- Introducing Pinocchio 3
- Pinocchio main features
- Documentation
- Examples
- Tutorials
- Pinocchio continuous integrations
- Performances
- Ongoing developments
- Installation
- Visualization
- Citing Pinocchio
- Questions and Issues
- Credits
- Open-source projects relying on Pinocchio
- Acknowledgments
Introducing Pinocchio 3
Pinocchio3 is the latest major release of Pinocchio. It comes with multiple new features, such as:
- Sparse constrained dynamics and its analytical derivatives
- Full support of closed-loop mechanisms
- State-of-the-art frictional contact solvers
- Low-complexity constrained articulated body algorithms
- Full support of multiple-precision floating-point (MPFR) in Python and C++
- Full CasADi support in Python and C++
- Increased support of CppAD and CppADCodeGen
- New SDF and MJCF parsers
- and much more.
Pinocchio main features
Pinocchio is fast:
- C++ template library,
- cache friendly,
- automatic code generation support is available via CppADCodeGen.
Pinocchio is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- support multiple precision arithmetic via Boost.Multiprecision or any similar framework,
- computations of kinematic and dynamic regressors for system identification and more,
- and much more with the support of modern and open-source Automatic Differentiation frameworks like CppAD or CasADi.
Pinocchio is flexible:
- header only,
- C++ 98/03/11/14/17/20 compliant.
Pinocchio is extensible. Pinocchio is multi-thread friendly. Pinocchio is reliable and extensively tested (unit-tests, simulations, and real-world robotics applications). Pinocchio is supported and tested on Windows, Mac OS X, Unix, and Linux (see build status here).
Documentation
The online Pinocchio documentation of the last release is available here. A cheat sheet pdf with the main functions and algorithms can be found here.
Examples
In the examples directory, we provide some basic examples of using Pinocchio in Python. Additional examples introducing Pinocchio are also available in the documentation.
Tutorials
Pinocchio comes with a large bunch of tutorials aiming at introducing the basic tools for robot control. Tutorial and training documents are listed here. You can also consider the interactive Jupyter notebook set of tutorials developed by Nicolas Mansard and Yann de Mont-Marin.
Pinocchio continuous integrations
Pinocchio is constantly tested for several platforms and distributions, as reported below:
| CI on ROS | |
| CI on Linux via APT | |
| CI on OSX via Conda | |
| CI on Windows via Conda | |
| CI on Linux via Robotpkg | |
Performances
Pinocchio exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, Pinocchio can unroll most of the computations directly at compile time, allowing to achieve impressive performances for a large range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical paper. In addition, the introspection may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
Ongoing developments
If you want to follow the current developments, you can directly refer to the devel branch. The master branch only contains the latest release. Any new Pull Request should then be submitted on the devel branch.
Installation
Pinocchio can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the installation procedure.
Conda
You simply need this simple line:
conda install pinocchio -c conda-forge
ROS
Pinocchio is also deployed on ROS. You may follow its deployment status below.
If you’re interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA. Here, you can install Pinocchio using:
sudo apt install ros-$ROS_DISTRO-pinocchio
This installs Pinocchio with HPP-FCL support and with Python bindings. You can then use Pinocchio in your ROS packages by:
- Depending on Pinocchio in your
package.xmlconfig (<depend>pinocchio</depend>) - Including Pinocchio via CMake (
find_package(pinocchio REQUIRED)) and linking against Pinocchio (target_link_libraries(my_library pinocchio::pinocchio))
We include support and hooks to discover the package for both ROS 1 and ROS 2. Examples can be found at the following repositories:
Please note that we always advise including the pinocchio/fwd.hpp header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 1 | ROS 2 | |||
|---|---|---|---|---|
| Melodic | Foxy | |||
| Noetic | Galactic | |||
| Humble | ||||
| Rolling |
Visualization
Pinocchio provides support for many open-source and free visualizers:
- Gepetto Viewer: a C++ viewer based on OpenSceneGraph with Python bindings and Blender export. See here for a C++ example on mixing Pinocchio and Gepetto Viewer.
- Meshcat: supporting visualization in Python and which can be embedded inside any browser.
- Panda3d: supporting visualization in Python and which can be embedded inside any browser.
- RViz: supporting visualization in Python and which can interact with other ROS packages.
Many external viewers can also be integrated. For more information, see the example here.
Citing Pinocchio
To cite Pinocchio in your academic research, please consider citing the software paper and use the following BibTeX entry:
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
And the following one for the link to the GitHub codebase:
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
Citing specific algorithmic contributions
Pinocchio goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning and control. Pinocchio provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc. If you use these algorithms, please consider citing them in your research articles.
- Le Lidec, Q., Montaut, L. & Carpentier, J. (2024, July). From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach. In RSS 2024-Robotics: Science and Systems.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). GJK++: Leveraging Acceleration Methods for Faster Collision Detection. IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). Constrained Articulated Body Dynamics Algorithms. Under review.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). Differentiable collision detection: a randomized smoothing approach. In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2023). Contact models in robotics: a comparative analysis. Under review.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). Collision Detection Accelerated: An Optimization Perspective. In Robotics: Science and Systems (RSS 2O22).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). Proximal and sparse resolution of constrained dynamic equations. In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018).
Questions and Issues
Do you have a question or an issue? You may either directly open a new question or a new issue or, directly contact us via the mailing list pinocchio@inria.fr.
Credits
The following people have been involved in the development of Pinocchio and are warmly thanked for their contributions:
- Justin Carpentier (Inria): main developer and manager of the project
- Nicolas Mansard (LAAS-CNRS): initial project instructor
- Guilhem Saurel (LAAS-CNRS): continuous integration and deployment
- Joseph Mirabel (Eureka Robotics): Lie groups and hpp-fcl implementation
- Antonio El Khoury (Wandercraft): bug fixes
- Gabriele Buondono (LAAS-CNRS): features extension, bug fixes, and Python bindings
- Florian Valenza (Astek): core developments and hpp-fcl support
- Wolfgang Merkt (University of Oxford): ROS integration and support
- Rohan Budhiraja (LAAS-CNRS): features extension
- Loïc Estève (Inria): Conda integration and support
- Igor Kalevatykh (Inria): Panda3d viewer support
- Matthieu Vigne (Wandercraft): MeshCat viewer support
- Robin Strudel (Inria): features extension
- François Keith (CEA): Windows support
- Sarah El Kazdadi (Inria): multi-precision arithmetic support
- Nicolas Torres Alberto (Inria): features extension
- Etienne Arlaud (Inria): RViz viewer support
- Wilson Jallet (LAAS-CNRS/Inria): extension of Python bindings
- Fabian Schramm (Inria): core developper
- Shubham Singh (UT Austin): second-order inverse dynamics derivatives
- Stéphane Caron (Inria): core developper
- Joris Vaillant (Inria): core developer and manager of the project
- Sebastian Castro (The AI Institute): MeshCat viewer feature extension
- Lev Kozlov: Kinetic and potential energy regressors
- Megane Millan (Inria): Features extension and core developer
- Simeon Nedelchev: Pseudo inertia and Log-Cholesky parametrization
- Ajay Sathya (Inria): core developer
If you have participated in the development of Pinocchio, please add your name and contribution to this list.
Open-source projects relying on Pinocchio
- Crocoddyl: A software to realize model predictive control for complex robotics platforms.
- TSID: A software that implements a Task Space Inverse Dynamics QP.
- HPP: A SDK that implements motion planners for humanoids and other robots.
- Jiminy: A simulator based on Pinocchio.
- ocs2: A toolbox for Optimal Control for Switched Systems (OCS2)
- TriFingerSimulation: TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- Casadi_Kin_Dyn: IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- PyRoboPlan: An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- ProxSuite-NLP: A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- Aligator: A versatile and efficient framework for constrained trajectory optimization.
- Simple: The Simple Simulator: Simulation Made Simple.
- LoIK: Low-Complexity Inverse Kinematics.
Acknowledgments
The development of Pinocchio is actively supported by the Gepetto team @LAAS-CNRS and the Willow team @INRIA.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Add parsing meshes with vertices for MJCF format (#2537)
Fixed
- Fix mjcf Euler angle parsing: use xyz as a default value for eulerseq compiler option (#2526)
- Fix variable naming in Python (#2530)
- Fix aba explicit template instantiation (#2541)
- CMake: fix RPATH on macos (#2546)
- Fix aba explicit template instantiation (#2541)
- Fix mjcf parsing of keyframe qpos with newlines (#2535)
- Fix sites parsing for MJCF format (#2548)
3.3.1 - 2024-12-13
Added
- Add
pinocchio_python_parsertarget (#2475)
Fixed
- Fix mjcf parsing of armature and of the default tag in models (#2477)
- Fix undefined behavior when using the site attribute in mjcf (#2477)
- Fix the type of image paths when loading textures in the meshcat visualizer (#2478)
- Fix meshcat examples ([#2503])[https://github.com/stack-of-tasks/pinocchio/pull/2503]
- Fix
pinocchio-test-cpp-parallel-geometrywhen built with Coal (#2502) - Fix scaling support for meshcat (#2511)
Changed
- On GNU/Linux and macOS, hide all symbols by default (#2469)
- Build
pinocchio_defaultwith collision features (#2517)
3.3.0 - 2024-11-06
Added
- Default visualizer can be changed with
PINOCCHIO_VIEWERenvironment variable (#2419) - Add more Python and C++ examples related to inverse kinematics with 3d tasks (#2428)
- Add parsing of equality/connect tag for closed-loop chains for MJCF format (#2413)
- Add compatibility with NumPy 2
__array__API (#2436) - Added argument to let users decide of root joint name when parsing models (urdf, mjcf, sdf) (#2402)
- Allow use of
pathlib.Path | strfor paths in python bindings (#2431) - Add Pseudo inertia and Log-cholesky parametrization (#2296)
- Add Pixi support (#2459)
Fixed
- Fix linkage of Boost.Serialization on Windows (#2400)
- Fix mjcf parser appending of inertias at root joint (#2403)
- Fix unit tests with GCC 13.3 (#2406
- Fix class abstract error for Rviz viewer (#2425)
- Fix compilation issue with MSCV and C++17 (#2437)
- Fix
pinocchio-test-py-robot_wrapperwhen building with SDF and collision support (#2437) - Fix crash when calling
Inertia::FromDynamicParametersin Python with wrong vector size (#2296) - Fix
examples/cassie-simulation.pyandexamples/talos-simulation.py(#2443) - Fix build with CppAd 2024 (#2459)
- Fix
pinocchio-test-cpp-mjcfunittest with Boost 1.86 (#2459) - Fix
pinocchio-test-cpp-constraint-variantsuninitialized values (#2459) - Fix mixing library symbols between Pinocchio scalar bindings (#2459)
- Fix bug for get{Joint,Frame}JacobianTimeVariation (#2466)
Changed
- Modernize python code base with ruff (#2418)
- Does not create a root_joint frame from parsed models (urdf, mjcf and sdf) when no root joint is provided (#2402)
3.2.0 - 2024-08-27
Fixed
- Append pinocchio optional libraries into pkg-config file (#2322)
- Fixed support of DAE meshes with MeshCat (#2331)
- Fixed pointer casts in urdf parser (#2339)
- Remove CMake CMP0167 warnings (#2347)
- Fixed urdfdom in ROS packaging (#2341)
- Fixed overview-urdf cpp example (#2384)
- Fixed mjcf model without a base link parsing (#2386)
- Fixed talos-simulation.py, simulation-contact-dynamics.py and simulation-closed-kinematic-chains.py examples (#2392)
Added
- Add getMotionAxis method to helical, prismatic, revolute and ubounded revolute joint (#2315)
- Add initial compatiblity with coal (coal needs
-DCOAL_BACKWARD_COMPATIBILITY_WITH_HPP_FCL=ON) (#2323) - Add compatibility with jrl-cmakemodules workspace (#2333)
- Add
collision_colorparameter toMeshcatVisualizer.loadViewerModel(#2350) - Add
BuildFromMJCFfunction to RobotWrapper (#2363) - Add more CasADi examples (#2388)
Removed
- Remove deprecated headers related to joint constraints (#2382)
Changed
- Use eigenpy to expose
GeometryObject::meshMaterialvariant (#2315) - GepettoViewer is no more the default viewer for RobotWrapper (#2331)
- Modernize python code base with ruff (#2367)
- Restructure CppAD and CasADi examples (#2388)
- Enhance and fix CppAD benchmarks outputs (#2393)
3.1.0 - 2024-07-04
Fixed
- Fix
appendModelwhen joints after the base are in parallel (#2295) - Fix
appendModelbuild when called with template arguments different than the ones fromcontext(#2284) - Fix
TransformRevoleTpl::rotationandTransformHelicalTpl::rotationbuild (#2284) - Fix compilation issue for Boost 1.85 (#2255)
- Fix python bindings of
contactInverseDynamics(#2263) - Deactivate
BUILD_WITH_LIBPYTHONwhen building with PyPy (#2274) - Fix Python bindings cross building with
hpp-fcl(#2288) - Fix build issue on Windows when a deprecated header is included (#2292)
- Fix build issue on Windows when building in Debug mode (#2292)
- Fix visualization of meshes in meshcat (#2294)
- Fix Anymal simulation test (#2299)
- Fix contact derivatives and impulse dynamics tests (#2300)
- Fix CMake compatibility with old console_bridge version (#2312)
Added
- Python unittest for
contactInverseDynamicsfunction (#2263) - Added helper functions to return operation count of CasADi functions. (#2275)
- C++ and Python unittest for
dIntegrateTransportto check vector transport and its inverse (#2273) - Add kinetic and potential energy regressors (#2282)
Removed
- Remove header
list.hppinclude for bindings of model and rnea (#2263)
3.0.0 - 2024-05-27
Added
Automatic differentiation
- Full support of Casadi in the main library by @jcarpent and @ManifoldFR
- Full support of Casadi for Python bindings by @jcarpent
- Full support of Boost.Multiprecision in the main library by @jcarpent
- Full support of Boost.Multiprecision for Python bindings by @jcarpent
- Full support of CppAD and CppADCodeGen in the main library by @jcarpent
- Full support of CppAD and CppADCodeGen for Python bindings by @jcarpent and @proyan
Core features
- Full support of constrained dynamical systems by @jcarpent
- Full support of derivatives of constrained dynamical systems by @jcarpent and @proyan
- Extended algorithms for constrained dynamics: constrained ABA, PV solvers, etc. by @jcarpent and @AjSat
- Add frictional contact solvers (PGS, ADMM) by @jcarpent
- Add contact inverse dynamics by @quentinll
- Full support of broadphase algorithms in Pinocchio by @jcarpent
- New joint supports (Helicoidal, Universal) by @fabinsch and @MegMll
- Add new algorithms for supporting Delassus factorizations for sparse, dense and tree-based systems by @jcarpent
- Add full OpenMP support for many algorithms (ABA, RNEA, collision detection, etc.) by @jcarpent
- Full support of GeometryModel, GeometryObject serialization by @jcarpent
- Extended support of Meshcat by @jcarpent, @ManifoldFR and @jorisv
- Extended testing and support of Lie groups operations by @jcarpent and @ManifoldFR
- Full support of AVX512 and AVX2 vectorization for Python bindings by @jcarpent
- Full support of the robot armature in RNEA, CRBA and ABA
- Extended formulation of CRBA and ABA using WORLD convention for reduced computational burden in the derivative algorithms
Parsers
Extra Algorithms
- Added reachable workspace computation and vizualisation in collaboration with @askuric based on pycapacity by @MegMll and @jorisv
Packaging
- Full support of template instantiation by @fabinsch and @jorisv
- Enhance support for Windows-based systems by @jorisv
- Splitting of the Pinocchio into sub-library for isolation by @jorisv
Compatibility
- Add
PINOCCHIO_ENABLE_COMPATIBILITY_WITH_VERSION_2define to activate compatibility with Pinocchio 2 API
Changed
C++
- Change minimum required version of C++ to C++11. Check for compatibility here: https://en.cppreference.com/w/cpp/compiler_support/11
- Replace
pinocchio::BiasZeroTplbypinocchio::MotionZeroTpl - Replace
pinocchio::fusion::JointVisitorBasebypinocchio::fusion::JointUnaryVisitorBase - Replace
pinocchio::fusion::push_frontbypinocchio::fusion::append - Replace
pinocchio::regressor::computeStaticRegressorbypinocchio::computeStaticRegressor - Replace
pinocchio::jointJacobianbypinocchio::computeJointJacobian - Replace
pinocchio::frameJacobianbypinocchio::computeFrameJacobian - Replace
pinocchio::framesForwardKinematicsbypinocchio::updateFramePlacements - Replace
pinocchio::kineticEnergybypinocchio::computeKineticEnergy - Replace
pinocchio::potentialEnergybypinocchio::computePotentialEnergy - Replace
pinocchio::computeCentroidalDynamicsbypinocchio::computeCentroidalMomentumandpinocchio::computeCentroidalMomentumTimeVariation - Replace
pinocchio::centerOfMass(const ModelTpl&, DataTpl&, int, bool)bypinocchio::centerOfMass(const ModelTpl&, DataTpl&, KinematicLevel, bool) - Replace
pinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, int)bypinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, KinematicLevel) - Replace
pinocchio/algorithm/dynamics.hppbypinocchio/algorithm/constrained-dynamics.hpp - Change the order of arguments in some of
pinocchio::GeometryObject’s constructors - Deprecate
pinocchio/algorithm/parallel/geometry.hppmoved atpinocchio/collision/parallel/geometry.hpp - Deprecate
pinocchio/spatial/fcl-pinocchio-conversions.hppmoved atpinocchio/collision/fcl-pinocchio-conversions.hpp - Deprecate
pinocchio/parsers/sample-models.hppmoved atpinocchio/multibody/sample-models.hpp - Deprecate
pinocchio/math/cppad.hppmoved atpinocchio/autodiff/cppad.hpp - Deprecate
pinocchio/math/cppadcg.hppmoved atpinocchio/autodiff/cppadcg.hpp - Deprecate
pinocchio/math/casadi.hppmoved atpinocchio/autodiff/casadi.hpp - Deprecate
pinocchio::FrameTpl::parentreplaced bypinocchio::FrameTpl::parentJoint - Deprecate
pinocchio::FrameTpl::previousFramereplaced bypinocchio::FrameTpl::parentFrame - Deprecate
pinocchio/algorithm/contact-dynamics.hppalgorithms replaced bypinocchio/algorithm/constrained-dynamics.hpp
Python
- Replace
pinocchio.utils.skewbypinocchio.skew - Replace
pinocchio.utils.se3ToXYZQUATbypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.utils.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.robot_wrapper.RobotWrapper.frameClassicAccelerationbypinocchio.robot_wrapper.RobotWrapper.frameClassicalAcceleration - Replace
pinocchio.robot_wrapper.RobotWrapper.jointJacobianbypinocchio.robot_wrapper.RobotWrapper.computeJointJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.frameJacobianbypinocchio.robot_wrapper.RobotWrapper.computeFrameJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.initDisplaybypinocchio.robot_wrapper.RobotWrapper.initViewer - Replace
pinocchio.robot_wrapper.RobotWrapper.loadDisplayModelbypinocchio.robot_wrapper.RobotWrapper.loadViewerModel - Replace
pinocchio.deprecated.se3ToXYZQUATtuplebypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.deprecated.se3ToXYZQUATbypinocchio.SE3ToXYZQUAT - Replace
pinocchio.deprecated.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.deprecated.buildGeomFromUrdf(model, filename, [str])bypinocchio.buildGeomFromUrdf(model, filename, type, package_dirs, mesh_loader) - Replace
pinocchio.rpy.npToTTuplebypinocchio.utils.npToTTuple - Replace
pinocchio.rpy.npToTuplebypinocchio.utils.npToTuple - Replace
pinocchio.jacobianSubtreeCoMJacobianbypinocchio.jacobianSubtreeCenterOfMass
Removed
C++
- Remove
pinocchio::setGeometryMeshScales - Remove some
pinocchio::forwardDynamicssignatures - Remove some
pinocchio::impulseDynamicssignatures
Python
- Remove
pinocchio.utils.cross - Remove
pinocchio.robot_wrapper.RobotWrapper.initMeshcatDisplay - Remove
pinocchio.deprecated.setGeometryMeshScalesbypinocchio
2.7.1 - 2024-04-26
Changed
- Modify algorithm that appends a model to another (#2218)
- Set NOMINMAX as a public definitions on Windows (#2139)
- Improve documentation of
enum ReferenceFrame(#2190) - Improve documentation of
getJointJacobian(#2193).
Fixed
- CMake now uses Relative Path instead of Absolute (#2202)
- Order of frames in
ReducedModelis now the same as in the full model (#2160) - Remove a lot of warnings (#2139)
-
MeshcatVisualizerdoesn’t crash anymore when there is no collision model defined (#2147) - Fix MSVC build (#2155)
- Fix stub generation (#2166)
- Clean up empty documentation pages and sections (#2167)
- Fix SO(3) title and cross-section reference in the documentation (#2210)
Added
- Add
examples/floating-base-velocity-viewer.pyto visualize floating base velocity (#2143) - Add remark to the documentation of
getFrame(Classical)Accelerationfunctions (#2169) - Allow use of installed jrl-cmakemodules (#2216)
2.7.0 - 2024-01-23
Added
- Add
GeometryObject::meshMaterialattribute (#2084) - Add Parser for mujoco mjcf models
pinocchio::mjcf::buildModelandpinocchio::mjcf::buildGeom
Fixed
- Use bp::ssize_t for recent version of Windows compilers (#2102)
- Fix missing include for Boost >= 1.83 (#2103)
- Remove f-strings to fix install with python 2 (#2110)
- CMake: stop exporting CppAd/cppadcodegen & fetch submodule if not available (#2112)
- Fix malloc issue in CRBA algo (#2126)
- Fix build cppad and cppadcg with Boost < 1.77 (#2132)
2.6.21 - 2023-11-27
Added
- Add inverse dynamics (
rnea) Python and C++ example (#2083) - Add visualization of Frames in MeshCat viewer (#2098)
Fixed
- Re-initialize
Ycrb[0]incrbaMinimal(#2040) - Fix custom scalar use in
logfunction (#2047) - Raise exception on wrong input size in
XYZQUATToSE3Python binding function (#2073) - Remove memory leak in
buildGeomFromUrdfandbuildGeomFromUrdfStringPython binding functions (#2082https://github.com/stack-of-tasks/pinocchio/pull/2082) - Fix Panda3D viewer examples (#2087)
- Fix centroidal dynamics derivatives with respect to time (#2094))
Changed
- Rename freeflyer_joint to root_joint in
humanoidsample model (#2043) - CMake minimal version is now 3.10 (#2055)
- Split headers and sources in different directories to have a more standard C++ project (#2070)
Removed
- Remove support to
hpp-fcl< v2.0.0 (#2086)
2.6.20 - 2023-08-09
What’s Changed
- Fix support of recent versions of Boost for CppAD and CppADCodeGen by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2000
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 1e0c5aff1147d50d58bf4185a55ff564c9b6e027 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2007
- Enabled copy and deepcopy by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1882
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 9f963f67ebb889792175776c5ee00134d7bb569b by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2013
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2029
2.6.19 - 2023-06-19
What’s Changed
- Add Motion::toHomogeneousMatrix by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1946
- The insatiable English teacher PR 🧙 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1957
- require C++14 for Boost >= 1.81 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1949
- CMake: an example require python 3 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1966
- Fix IK example in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1963
- Issue templates by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1971
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1976
- Enhance CMake packaging for Windows by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1984
- Documentation by @drewhamiltonasdf in https://github.com/stack-of-tasks/pinocchio/pull/1986
- Add support for ccache on Conda build by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1987
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1988
- Enhance compatibility with new Python versions by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1996
New Contributors
- @drewhamiltonasdf made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1986
2.6.18 - 2023-04-29
What’s Changed
- Support force in pybind11 by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1868
- Fix some Python bindings signatures and add stub generation. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1869
- Fix IK example by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1875
- Remove empty examples by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1878
- build(deps): bump ros-industrial/industrial_ci from 6a8f546cbd31fbd5c9f77e3409265c8b39abc3d6 to 4b78602d67127a63dce62926769d9ec4e2ce72e4 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1890
- add static-contact-dynamics example by @PepMS in https://github.com/stack-of-tasks/pinocchio/pull/1891
- Update documentation of
JointModel.shortnamein python bindings by @Danfoa in https://github.com/stack-of-tasks/pinocchio/pull/1892 - update doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1898
- Document that joints need to be added in depth-first order by @traversaro in https://github.com/stack-of-tasks/pinocchio/pull/1899
- fix INSTALL_RPATH on ROS & OSX by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1908
- Python example: update joint placements after loading a URDF by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1911
- Remove more empty sections from the docs by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1912
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1914
- update doc for fixed joint by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1920
- doc: more information about frames on cheatsheet by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1930
- Define operational frames in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1929
- Remove support of np.matrix by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1941
- Fix other np.matrix issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1942
New Contributors
- @PepMS made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1891
- @Danfoa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1892
2.6.17 - 2023-02-15
What’s Changed
- Fix Jlog6 documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1857
- Add documentation to Jlog3 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1858
- [python/visualize] Extend visualizer features and implement them for MeshcatVisualizer by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1845
- Second-order RNEA derivatives by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1860
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1863
- Fix support of AVX2. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1865
2.6.16 - 2023-02-02
What’s Changed
- Enforce testing of Python bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1853
- Fix issue with Python 3.6 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1855
2.6.15 - 2023-01-31
What’s Changed
- More documentation for getJointJacobian by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1836
- Error when integrating SE3 with the same vector given as input and output by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1775
- Documentation for Jlog6 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1842
- remove useless header by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1846
- Fix issue with recent change on master branch for ROS-CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1847
- Fix issue with old version of Boost and eigenpy >= 2.9.0 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1851
2.6.14 - 2023-01-13
What’s Changed
- Fix registration of ptr to Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1832
2.6.13 - 2023-01-12
What’s Changed
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1790
- Skip collision pairs between geom on same joint in appendGeometryModel by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1791
- Fix issue with Boost 1.78 on OSX systems by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1792
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1793
- Add helper functions for computing supported inertia and force by frames by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1796
- Follow-up : Supported inertia by frame by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1797
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1799
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1801
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1802
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1809
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1811
- Fix Python issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1821
- Allow to use std::shared_ptr by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1822
2.6.12 - 2022-11-06
What’s Changed
- Elevate check for ambiguous input argument to an exception by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1781
- Fix packaging issues + sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1782
- Fix issue with clang by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1784
2.6.11 - 2022-10-25
What’s Changed
- URDF: fix loading relative mesh path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1748
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1750
- Add @note to difference documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1753
- Configuration limits for joints and model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1756
- Address remaining warnings + speed-up build for BUILD_TESTING=OFF by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1764
- Add status of ROS builds to README by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1770
- pinocchio/visualize: Add support for cone shape in meshcat dispaly by @whtqh in https://github.com/stack-of-tasks/pinocchio/pull/1769
- Updates README by @nikoandpiko in https://github.com/stack-of-tasks/pinocchio/pull/1776
- Enhance cmake packaging by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1777
New Contributors
- @stephane-caron made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1753
- @whtqh made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1769
- @nikoandpiko made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1776
2.6.10 - 2022-09-14
What’s Changed
- fix syntax for python 2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1734
- Expose
removeGeometryObjectin python binding by @Jiayuan-Gu in https://github.com/stack-of-tasks/pinocchio/pull/1736 - Fix relocalable by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1738
- Fix relative path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1742
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1744
New Contributors
- @Jiayuan-Gu made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1736
2.6.9 - 2022-08-12
What’s Changed
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1669
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1670
- Sync example-robot-data by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1671
- update to pybind11 v2.9.2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1674
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1678
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1677
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1679
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1692
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1691
- Fix bug in appendModel by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1693
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1695
- Fix geometry color default value by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1699
- Add python example appending Urdf and another model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1698
- SO3 diff impl use quaternion instead of rotation matrix by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1702
- add cheat sheet to doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1705
- cmake/utils: no need for python here by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1709
- Add header only target by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1712
- cmake: relocatable package for recent CMake versions by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1716
- cmake: modernize header-only lib by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1718
- ROS2/Colcon integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1719
- CMake: update to eigenpy 2.7.10 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1720
- Fix weird test failure on Conda by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1723
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1727
- ROS2 release support by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1681
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1732
New Contributors
- @fabinsch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1698
2.6.8 - 2022-06-06
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1648
- Fix integrate method for SO2 by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1652
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1653
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1658
- Extend current Coriolis computations to account for Cristoffel symbol of first kind by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1665
- Fix method play() of rviz_visualizer by @danielcostanzi18 in https://github.com/stack-of-tasks/pinocchio/pull/1667
- chore: Included githubactions in the dependabot config by @nathannaveen in https://github.com/stack-of-tasks/pinocchio/pull/1659
- Enable ubuntu 22.04 on CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1668
New Contributors
- @pre-commit-ci made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1648
- @Toefinder made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1652
- @danielcostanzi18 made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1667
- @nathannaveen made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1659
2.6.7 - 2022-05-03
What’s Changed
- add dummy .pre-commit-config.yaml by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1629
- Avoid triggering multi-line comment in Latex formula by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1630
- Make Pinocchio v2 compatible with HPP-FCL v2 by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1631
- Add example of collision with a point cloud by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1636
- follow up on hpp-fcl v2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1637
- Fix pickling for Boost >= 1.7.4 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1640
2.6.6 - 2022-03-22
What’s Changed
- Support HPP-FCL for ROS binaries & introduce ROS2 ament integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1622
2.6.5 - 2022-02-14
What’s Changed
- Fix warning issue in Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1546
- RVizVisualizer update by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1549
- Correct link to examples. Removed python subdirectory in the link as the directory does not exist anymore by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1561
- Add CONTRIBUTING.md file for newcomers by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1563
- Add list of projects based on Pinocchio by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1566
- Fix constrained dynamics formula by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1567
- Append “/share” to AMENT_PREFIX_PATH by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1568
- Expose dIntegrateTransport by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1572
- [timings] Reduce allocations in finite-difference baselines by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1583
- [computeAllTerms] Add missing noalias to avoid temporary allocation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1582
- Missing
noaliasby @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1585 - [multibody/model] add joint arg validation by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1586
- [multibody/geometry] Add method to remove an object. by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1588
- Fix bug in ABAChecker by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1599
- Update README.md by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1604
- allow
robot_wrapperto share data with itsvizby @vnghia in https://github.com/stack-of-tasks/pinocchio/pull/1606
New Contributors
- @duburcqa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1585
- @vnghia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1606
2.6.4 - 2021-11-02
What’s Changed
- Change ‘typedef’ to ‘using’, add curly braces by @the-raspberry-pi-guy in https://github.com/stack-of-tasks/pinocchio/pull/1476
- [CMake] set INSTALL_RPATH for python on linux by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1482
- [visualize] captureImage() method by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1480
- ci: update ROS CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1483
- Fix issue with Pool when FCL is missing by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1485
- fix module name by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1487
- Add RVizVisualizer by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1488
- fix reshape issues by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1489
- Remove useless reference to L-GPL + remove of useless files by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1500
- Update old function, remove mobile robot wrapper by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1490
- Allows the display of {COLLISION,VISUAL} in MeshCat by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1502
- Delete submodule travis by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1509
- Add citation by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1511
- badges: add PyPI by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1510
- Add support of Convex within MeshCat + improve GeometryObject bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1530
- [python] Fix BaseVisualizer constructor. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1533
- [python] Add pybind11 header. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1519
- make copy of supports during model cast by @rubengrandia in https://github.com/stack-of-tasks/pinocchio/pull/1536
- [python] Simplify buildGeomFromUrdf and allow to build from string. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1538
- Sync submodule by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1542
- Turn off automatic documentation generation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1541
New Contributors
- @the-raspberry-pi-guy made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1476
- @ManifoldFR made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1480
- @EtienneAr made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1488
- @kozakromch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1489
- @rubengrandia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1536
2.6.3 - 2021-07-27
This new release fixes bugs in MeshCat rendering, loading of ROS path and in the Centroidal dynamics derivatives
2.6.2 - 2021-07-05
This new release provides fixes include orders in the unit tests due to recent versions of Boost. It also provides more content to the Readme. This new release prefigures the new Pinocchio 3.x
2.6.1 - 2021-06-08
Enhancement:
- extended support of serialization of FCL primitives
- extended support of Boost.Variant in Python
Fixes:
- fix bug when loading URDF on Windows
- fix handling of Frame inertia
2.6.0 - 2021-04-11
This new release provides:
- improvement for handling collision/distance requests
- support of parallel computations for ABA, RNEA and collisions algorithms (more to come soon)
- additional features for the RobotWrapper in Python
- support of Capsule for Meshcat
- happened Inertia information to Frames
- fixes for doc issues
- improve numerical robustness when two inertias are Zero
2.5.6 - 2021-01-23
This new release comes with a more consistent ABA algorithm (data.a_gf used instead of classic data.a) and more outcomes for computeAllTerms. In addition, it provides some extended supports to PyPy.
2.5.5 - 2021-01-07
This maintenance release enhances the whole CMake packaging of the project and provides additional features for the Python bindings.
2.5.4 - 2020-11-26
This new release enhances the compatibility of Pinocchio with former distributions, provides better support to Euler angles and fixes some bugs.
2.5.3 - 2020-11-13
This new release fixes some issues with the Python bindings, add new examples and extend the whole tests.
2.5.2 - 2020-11-02
This new release enhances the compatibility with Windows, provides new tools eitheir to work on joint configurations and also to compute the kinematic regressors.
2.5.1 - 2020-10-12
This new release provides:
- improvements on the whole project coverage
- better support of Windows v142
- support of joint friction and damping (only at the interface level)
- new algorithm to retrieve the Coriolis matrix from RNEA/ABA derivatives
2.5.0 - 2020-08-31
In this new release, we have:
- a full memory shared in the Python bindings, i.e. that all the Eigen object can now be changed in Python.
- better handling of multiprecision arithmetic
- improved CMake packaging
- fix for Autodiff
2.4.7 - 2020-07-20
This new release provides:
- an extended API for dealing with Lie groups and the related computations (integration, difference, derivatives, etc.)
- the Lie groups have now their Python bindings for easy code prototyping
- the kinematics derivatives of the Frames have been introduced as well as the extension of current Joints derivatives
- the packaging of the project has been improved too.
2.4.6 - 2020-06-15
This new release of Pinocchio removes the use of pkg-config to check dependencies and provides a full compatibility and support for Windows systems.
2.4.5 - 2020-05-23
This new release extends the current frames algorithms to also consider the LOCAL_WORLD_ALIGNED reference frame. It also exposes the values of the enum_ for simplified usage.
2.4.4 - 2020-05-13
This new release provides:
- new helpers function to retrieve frame velocities and accelerations
- for each collision pair, it is now possible to provide specific collision checking settings
- support to display convex hulls in viewers
It also fixes:
- the support of Panda3d
and enhances the global CMake packaging of the project.
2.4.3 - 2020-04-24
This new release provides a new Viewer, named Panda3d, for easy code visualization in Python. It also provides additional fixes to the Code Generation support.
2.4.2 - 2020-04-21
This new release of Pinocchio provides new features for dealing with Lie groups:
- improved operations over the differential operations of the integrate function
- new functions for transporting some matrix between the two endpoints of the integrate function
- the RPY functions are now robust over singularities
- the support of autodiff frameworks has been improved to also cope with Lie groups features
This release also provides:
- a packaging fixe with respect to the URDFDOM dependency
- the Python bindings should now be without memory leak
2.4.1 - 2020-04-15
This new release fixes a bug introduced in Pinocchio 2.4.0 concerning the method ModelTpl::addFrame. This release also provides better support for the checking of the CppAD and CppADCodeGen versions.
2.4.0 - 2020-04-09
This new release of Pinocchio makes several improvements:
- improve compatibility with hpp-fcl
- improve compatibility with CppAD and notably the Lie algebra features
- a better CMake >= 3.0 export of the project
- new examples for Code generation
- improved Python bindings
- improved support for Boost.Multiprecision
- reduce the memory usage when compilation unit tests
and we have started to move some dependencies like urdfdom to the pinocchio.so library to avoid additional compilations issues and to useless compilations burden.
2.3.1 - 2020-02-20
This new release provides:
- some fixes with respect to minor bugs introduced in Pinocchio 2.3.0
- an enhance detection of Python
- improves the compilation memory overhead
2.3.0 - 2020-02-18
This new release provides:
- full compatibility with CMake export
- full compatibility with Numpy.Array
- examples for Code generation
- better support of C++11
- minor bug fixes
- improves coverage
- uniformizes function signature
- improves interoperability between Numpy and Pinocchio
- add many examples
- full integration of Python bindings of hpp-fcl
- supports the pickling and the serialization of Data
2.2.3 - 2019-12-30
This new release provides:
- pickling and serialization of Data structures
- provide new algorithms to create reduce models
It also improves the compatibility with the Transform used in HPP-FCL. It also fixes various bugs. It also comes with new and detailed examples.
2.2.2 - 2019-12-11
This new release:
- improves the compatibility with HPP-FCL bindings
- improves the documentation of the project with more examples
- fixes some bugs related to Eigen
- add new algorithms to compute the centroidal matrix and its time derivatives
2.2.1 - 2019-11-25
This new release fixes the ROS package version number and updates the robot models.
2.2.0 - 2019-11-25
This new release of Pinocchio introduces:
- analytical formula for Hessian of the kinematics
- derivatives of the difference operation
- new derivatives for static torque quantity
- new models for tests and examples.
It adds some signature non-exposed in Python. It also deletes outdated function signatures that have been deprecated in 2.0.x versions. It also improves the packaging with respect to ROS or other robotics frameworks.
2.1.11 - 2019-10-27
This release fixes missing update of the ROS package.xml file with the new version.
2.1.10 - 2019-10-25
This new release allows throwing when some input arguments are not fulfilled (useful feature in Python). It also provides new support for Hessian of the kinematics. Finally, the project is now packaged for ROS integration.
2.1.9 - 2019-10-09
This is a maintenance release, with some fixes concerning the contact dynamics, better support of LOCAL_WORLD_ALIGNED option and fixes with respect to some recent versions of CppADCodeGen.
2.1.8 - 2019-09-30
This is a maintenance release providing several fixes:
- remove memory allocation in ABA derivatives with contact forces
- better handling of boost::Variant
- better support of Majax
It also provides new features in the documentation of mathematical formula.
2.1.7 - 2019-09-10
This new release improves:
- the support of AutoDiff frameworks
- the efficiency of some core algorithms
fixes:
- the support of Majax
- the compatibility with Python 2/3
2.1.6 - 2019-08-05
This new release improves the packaging of the project and provides new algorithms to compute the Jacobians of the center of mass of each subtree.
2.1.5 - 2019-07-16
This new release provides support for JointMimic and JointRevoluteUnboundedUnaligned. It also comes with the full support of CasADi.
Thanks to @mkatliar for helping us to provide this support.
2.1.4 - 2019-06-22
This new release provides some fixes with respect to Python bindings, C++17 as well as new important features:
- dynamic regressor for identification
- add support of multiple viewers
- improve analytical derivatives
2.1.3 - 2019-04-30
This new release fixes some issues with Python 3 and C++17 standard. It also provides additional documentation, enlarges the current Python bindings and uniformizes naming convention in Python.
2.1.2 - 2019-04-05
This new release aims at fixing compilations issues when COLLISION module is activated. It also provides some fixes concerning the loading of meshes.
A new feature provided by this release concerns the possibility of appending two models together.
2.1.1 - 2019-03-27
This new release fixes compatibility bugs with previous release 2.1.0. It also provides a serialization interface for Spatial classes and the Model class.
2.1.0 - 2019-02-27
This new release makes some major improvements:
- it is now possible to use MeshCat, another viewer working in the browser directly in Python
- the Python bindings are now hardly tested and uniformized with respect to the C++ API
- this new release is compatible with recent releases of
hpp-fcl - the SRDF parsing has been improved. Its now possible to load several reference configuration vectors
We also fixed bugs related to recent versions of Boost mostly.
2.0.0 - 2019-01-11
Welcome Pinocchio 2.0.0.
This release makes official the last important and new features for efficiently computing the dynamics of the rigid body systems:
- Analytical derivatives
- Automatic differentiation
- Full scalar type overloading
- Code generation among others
1.3.3 - 2018-10-29
This is for real the last release before Pinocchio 2.0.0 and more.
This release fixes the packaging when hpp-fcl is missing. Thanks to @aelkhour for raising this issue.
1.3.2 - 2018-10-26
This release is the last one before Pinocchio 2.0.0.
It mostly:
- fixes issues introduced by new API of frame functionalities;
- introduces new sample models for manipulator and humanoid systems;
- fixes bugs due to boost 1.58.0;
- improve the readme with credits section.
1.3.1 - 2018-09-25
This new release corrects some bugs or bad deprecations concerning Pinocchio 1.3.0.
1.3.0 - 2018-08-28
This new release introduces analytical derivatives in the corpus of Pinocchio. This feature is still under development but can already be used both in C++ and Python.
This new release also fixes a bunch of bugs related to Eigen and Boost.
1.2.9 - 2018-06-01
This is mostly a maintenance release:
- Fix bug in. lower bounds in Model class
- Update documentation structure (additional work is needed)
- Improve the compatibility with Python 3.x
1.2.8 - 2018-05-18
This is mostly a maintenance release:
- Fix some bugs in JointModel{Translation,Spherical} for ABA algorithm
- Fix a duplication issue in RobotWrapper
- Improve compatibility with recent version of Boost >= 1.67.0
- Romeo is now loaded from the official romeo_description repository
1.2.7 - 2018-04-03
This is mostly a maintenance release:
- Fixes and computation improvements for Lie group operations.
- Adding pickle for spatial classes.
- Allow loading of URDF tree directly from an XML stream.
1.2.6 - 2018-01-15
This is mostly a maintenance release with various fixes to comply with Boost variadic macro on recent OS. It also adds new convention with a LOCAL and a WORLD frame to express Jacobian quantities.
1.2.5 - 2017-10-10
This a maintenance Release. We added some algo to compute the time variation of the Jacobians together with the variation with respect to time of the centroidal momemtum matrix. HPP-FCL works now with Eigen for linear algebra.
1.2.4 - 2017-06-09
This is mostly a maintenance release, with some fix with respect new urdfdom versions, it handles Eigen support with hpp-fcl.
1.2.3 - 2017-02-14
This release fixes some issues with respect to 1.2.1.
API modifications
Interpolate, Differentiate, Integrate are now algorithmic struct which can be efficiently overloaded.
Bindings
Add FCL object bindings
1.2.1 - 2016-10-17
Summary
This release is a minor patch of the previous release 1.2.0.
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New
- The Python bindings are aligned and free of unnecessary allocations
- Add documentation option which allows to not install the documentation
- Introduces container::aligned_vector to automatically create an std::vector with specific aligned allocator
API modifications
- Remove JointDense.
- Remove JointGeneric
Fixes
- Solves the parsing of geometries in URDF module
- Fixes alignment issues on 32 bits architecture
1.2.0 - 2016-09-29
Summary
The main modifications concern the update of the code to comply with the Humanoid Path Planner (HPP).
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Add Joint{Model,Data} classes based on Joint{Model,Data}Base and Joint{Model,Data}Variant. Those classes call directly the visitors and make Variant accessible throw methods
- Add partial Joint{Model,Data}Composite. They allow a stack of joints without adding any Inertia.
- Increase Frame class. Frames can be of several types (BODY, JOINT, SENSOR, etc) and reflect the robot tree as it appears in the URDF conventions. Frames have two attributes: parent which the direct Joint parent in the Joint tree, previousFrame which correspond to the parent Frame in the tree of Frames).
- Adding Python parser which is able to read models written in Python.
- Add algo checker to check the validity of a model.
- Improve documentation.
API modifications
- Model has some methods deprecated. The default name has been removed.
- The Geometry classes have been updated and several methods have been set to deprecated. They now use Frames as parent instead of Joint directly: a Geometry is now supported by a BODY.
- Add active collision pair flags in GeomData which define the active collision pairs.
- Unify naming conventions (nframes, njoints, etc).
Fixes
- The UDRF parser can now deal with more complex topologies. It properly handles the stack of geometries for each BODY.
- Improve packaging mainly around the Python part.
1.1.2 - 2016-05-31
Summary
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Added operational frames (that are a Plucker coordinate frame attached to a parent joint inside a kinematic tree). Position and Jacobian of such frames can be computed
- Geometry primitives can now be handled (and added to the Pinocchio GeometryModel) when encountered in an urdf file
- Implemented simple srdf parsing for GeometryData : parse the desactivated collision pairs
- Added Articulated Body Algorithm (ABA), and CCRBA
- When parsing a urdf file, now look in the environment variable ROS_PACKAGE_PATH for directories where to search for meshes. Users can provide hint directories to search in as a priority. Updated python RobotWrapper consequently
- Added forward dynamics with contact algorithm
- Added algorithms working with vectors of configuration or velocity(either on a JointModel or on a Model, iterating through all the kinematic tree)
- One can integrate a configuration at a constant velocity during a unit time
- One can differentiate two configurations (i.e compute the velocity that must be integrated during a unit time to go from first configuration to the other )
- One can interpolate between two configurations
- One cancompute the distance between two configurations ( such as dist = norm ( difference) )
- One can shoot a configuration uniformly sampled between specified limits
- Added Impulse Dynamic Algorithm
- Completed the list of method to access or call Joint’s data or method when joint are stored in a variant.
- Added JointAccessor that is a general joint encapsulating a JointVariant ( abstracting the use of visitors for the user).
API modifications
- Moved limits from joint models to Model as vectors of size nq for position limits and size nv for velocity and effort limits
- The Geometry objects stored in GeometryModel are now splitted in two types : visual and collision
Minor
- Improved documentation of Data, Model, Spatial Classes
- Improved efficiency when executing algorithms
- One can now create Inertia for simple shapes such as cylinders, boxes, ellipsoid
- Rework some unittests to increase to coverage of whole package ( C++ and Python )
Bugs Fixed
- Fixed operator Inertia x constraint in JointSphericalZYX
- Fixed the Dense conversion of joints (models and datas)
- Fixed bugs in JointRevoluteUnaligned and JointPrismaticUnaligned to access the access when visiting a variant containing such joints with boost::fusion
1.1.0 - 2016-02-04
Summary
New Features
- Spatial classes now follow the CRTP Design Pattern, for performance reasons.
- JointModels are now exposed in Python. This feature enables one to load a URDF model with a precise root joint and to create his/her own model.
- Python models can now be created by hand ( ex: buildEmptyModel() + calls to addBody() )
- Added utility tools to check an urdf model ( same as check_urdf but dislpay the Pinocchio model created from urdf parsing)
- Add unaligned prismatic joint
- Add geometry through Flexible Collision Library (hpp-fcl)
- Add dedicated structs to handle geometry. GeometryModel (list of geometry objects and its relation wrt kinematic model) and GeometryData
- When parsing urdf, meshes can be read from collada files and handled in Pinocchio
- Created parser that handles geometry and exposed it in python
- Add algorithms to update the geometry kinematics, to compute the distances for pairs of collision or if they are colliding or not.
- Added algorithms to compute the kinetic energy, the potential energy and exposed it in python
- The complete documentation is in progress
API modifications
- Change name of kinematics algorithms: now forwardKinematics instead of previous geometry, kinematics and dynamics.
Minor
- SimpleHumanoid is now built with joint limits
- Handle floating joints in urdf parsing
- Slight separation between joints and body in Model to avoid confusion
- Internally, Motion and Force classes now use a 6D-vector instead of two 3D-vectors for linear and angular part
Bugs Fixed
- Fixed a bug when trying to merge a link with its parent in case of fixed joint. Now merge only if it has an inertial tag.
- All the algorithms are now set to inline
- Fix compilation errors
Installation
The source of the release are available in the file pinocchio-1.1.0.tar.gz just below along with a binary version for 64-bits Debian architecture of Pinocchio **pinocchio_1.1.0amd64.deb** and its dependencies. For information, those packages will be installed in _/opt/openrobots directory.
1.0.2 - 2015-09-14
Summary
New Features
- The limits in position, velocity and torque for joints Revolute and Prismatic are now parsed from urdf model and accessible
- Implementation of exp and log functions on SE3 in C++ with its python binding thanks to @aelkhour
- Data now contains information relative to the center of mass position, velocity and acceleration
- Add Lua parser - compatible with RBDL
- Add translational joint
- Add planar joint
Minor
- Reduction of compilation warnings.
Bugs Fixed
- Fixed bug in operator Y*S in JointRevoluteUnaligned
1.0.0 - 2015-04-03
The following algorithms are implemented. • Recursive Newton-Euler algorithm (RNEA, i.e inverse dynamics) • Composite Rigid Body algorithm (CRBA, i.e generalized inertia matrix) • Sparse Cholesky decomposition of the inertia matrix (for constrained forward-dynamics resolution) • Placement Jacobians (i.e application from configuration velocities to end-effector spatial velocities), along with computation of body placements, velocities and accelerations. • Center of mass and its Jacobian
The model can either be parsed from a URDF format or be created by appendending bodies. The following joint models are implemented. • Revolute X, Y, Z (optimized) and unaligned with Cartesian directions • Prismatic X, Y, Z • Spherical (with and withoug singularities) • FreeFlyer (i.e. no constraint, for mobile robots like humanoids – using quaternion representation for the rotation) • Fixed (concatenation of two consecutive bodies)
Wiki Tutorials
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged pinocchio at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.3.1 |
| License | BSD-2 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stack-of-tasks/pinocchio.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-01-13 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Justin Carpentier
- Wolfgang Merkt
Authors
![]()
![]()
![]()
![]()
Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone’s algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
Pinocchio was first tailored for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.). It is built upon Eigen for linear algebra and FCL for collision detection. Pinocchio comes with a Python interface for fast code prototyping, directly accessible through Conda.
Pinocchio is now at the heart of various robotics software as Crocoddyl, an open-source and efficient Differential Dynamic Programming solver for robotics, the Stack-of-Tasks, an open-source and versatile hierarchical controller framework or the Humanoid Path Planner, open-source software for Motion and Manipulation Planning.
If you want to learn more about Pinocchio internal behaviors and main features, we invite you to read the related paper and the online documentation.
If you want to dive into Pinocchio directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
Table of contents
- Table of contents
- Introducing Pinocchio 3
- Pinocchio main features
- Documentation
- Examples
- Tutorials
- Pinocchio continuous integrations
- Performances
- Ongoing developments
- Installation
- Visualization
- Citing Pinocchio
- Questions and Issues
- Credits
- Open-source projects relying on Pinocchio
- Acknowledgments
Introducing Pinocchio 3
Pinocchio3 is the latest major release of Pinocchio. It comes with multiple new features, such as:
- Sparse constrained dynamics and its analytical derivatives
- Full support of closed-loop mechanisms
- State-of-the-art frictional contact solvers
- Low-complexity constrained articulated body algorithms
- Full support of multiple-precision floating-point (MPFR) in Python and C++
- Full CasADi support in Python and C++
- Increased support of CppAD and CppADCodeGen
- New SDF and MJCF parsers
- and much more.
Pinocchio main features
Pinocchio is fast:
- C++ template library,
- cache friendly,
- automatic code generation support is available via CppADCodeGen.
Pinocchio is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- support multiple precision arithmetic via Boost.Multiprecision or any similar framework,
- computations of kinematic and dynamic regressors for system identification and more,
- and much more with the support of modern and open-source Automatic Differentiation frameworks like CppAD or CasADi.
Pinocchio is flexible:
- header only,
- C++ 98/03/11/14/17/20 compliant.
Pinocchio is extensible. Pinocchio is multi-thread friendly. Pinocchio is reliable and extensively tested (unit-tests, simulations, and real-world robotics applications). Pinocchio is supported and tested on Windows, Mac OS X, Unix, and Linux (see build status here).
Documentation
The online Pinocchio documentation of the last release is available here. A cheat sheet pdf with the main functions and algorithms can be found here.
Examples
In the examples directory, we provide some basic examples of using Pinocchio in Python. Additional examples introducing Pinocchio are also available in the documentation.
Tutorials
Pinocchio comes with a large bunch of tutorials aiming at introducing the basic tools for robot control. Tutorial and training documents are listed here. You can also consider the interactive Jupyter notebook set of tutorials developed by Nicolas Mansard and Yann de Mont-Marin.
Pinocchio continuous integrations
Pinocchio is constantly tested for several platforms and distributions, as reported below:
| CI on ROS | |
| CI on Linux via APT | |
| CI on OSX via Conda | |
| CI on Windows via Conda | |
| CI on Linux via Robotpkg | |
Performances
Pinocchio exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, Pinocchio can unroll most of the computations directly at compile time, allowing to achieve impressive performances for a large range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical paper. In addition, the introspection may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
Ongoing developments
If you want to follow the current developments, you can directly refer to the devel branch. The master branch only contains the latest release. Any new Pull Request should then be submitted on the devel branch.
Installation
Pinocchio can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the installation procedure.
Conda
You simply need this simple line:
conda install pinocchio -c conda-forge
ROS
Pinocchio is also deployed on ROS. You may follow its deployment status below.
If you’re interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA. Here, you can install Pinocchio using:
sudo apt install ros-$ROS_DISTRO-pinocchio
This installs Pinocchio with HPP-FCL support and with Python bindings. You can then use Pinocchio in your ROS packages by:
- Depending on Pinocchio in your
package.xmlconfig (<depend>pinocchio</depend>) - Including Pinocchio via CMake (
find_package(pinocchio REQUIRED)) and linking against Pinocchio (target_link_libraries(my_library pinocchio::pinocchio))
We include support and hooks to discover the package for both ROS 1 and ROS 2. Examples can be found at the following repositories:
Please note that we always advise including the pinocchio/fwd.hpp header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 1 | ROS 2 | |||
|---|---|---|---|---|
| Melodic | Foxy | |||
| Noetic | Galactic | |||
| Humble | ||||
| Rolling |
Visualization
Pinocchio provides support for many open-source and free visualizers:
- Gepetto Viewer: a C++ viewer based on OpenSceneGraph with Python bindings and Blender export. See here for a C++ example on mixing Pinocchio and Gepetto Viewer.
- Meshcat: supporting visualization in Python and which can be embedded inside any browser.
- Panda3d: supporting visualization in Python and which can be embedded inside any browser.
- RViz: supporting visualization in Python and which can interact with other ROS packages.
Many external viewers can also be integrated. For more information, see the example here.
Citing Pinocchio
To cite Pinocchio in your academic research, please consider citing the software paper and use the following BibTeX entry:
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
And the following one for the link to the GitHub codebase:
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
Citing specific algorithmic contributions
Pinocchio goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning and control. Pinocchio provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc. If you use these algorithms, please consider citing them in your research articles.
- Le Lidec, Q., Montaut, L. & Carpentier, J. (2024, July). From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach. In RSS 2024-Robotics: Science and Systems.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). GJK++: Leveraging Acceleration Methods for Faster Collision Detection. IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). Constrained Articulated Body Dynamics Algorithms. Under review.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). Differentiable collision detection: a randomized smoothing approach. In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2023). Contact models in robotics: a comparative analysis. Under review.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). Collision Detection Accelerated: An Optimization Perspective. In Robotics: Science and Systems (RSS 2O22).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). Proximal and sparse resolution of constrained dynamic equations. In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018).
Questions and Issues
Do you have a question or an issue? You may either directly open a new question or a new issue or, directly contact us via the mailing list pinocchio@inria.fr.
Credits
The following people have been involved in the development of Pinocchio and are warmly thanked for their contributions:
- Justin Carpentier (Inria): main developer and manager of the project
- Nicolas Mansard (LAAS-CNRS): initial project instructor
- Guilhem Saurel (LAAS-CNRS): continuous integration and deployment
- Joseph Mirabel (Eureka Robotics): Lie groups and hpp-fcl implementation
- Antonio El Khoury (Wandercraft): bug fixes
- Gabriele Buondono (LAAS-CNRS): features extension, bug fixes, and Python bindings
- Florian Valenza (Astek): core developments and hpp-fcl support
- Wolfgang Merkt (University of Oxford): ROS integration and support
- Rohan Budhiraja (LAAS-CNRS): features extension
- Loïc Estève (Inria): Conda integration and support
- Igor Kalevatykh (Inria): Panda3d viewer support
- Matthieu Vigne (Wandercraft): MeshCat viewer support
- Robin Strudel (Inria): features extension
- François Keith (CEA): Windows support
- Sarah El Kazdadi (Inria): multi-precision arithmetic support
- Nicolas Torres Alberto (Inria): features extension
- Etienne Arlaud (Inria): RViz viewer support
- Wilson Jallet (LAAS-CNRS/Inria): extension of Python bindings
- Fabian Schramm (Inria): core developper
- Shubham Singh (UT Austin): second-order inverse dynamics derivatives
- Stéphane Caron (Inria): core developper
- Joris Vaillant (Inria): core developer and manager of the project
- Sebastian Castro (The AI Institute): MeshCat viewer feature extension
- Lev Kozlov: Kinetic and potential energy regressors
- Megane Millan (Inria): Features extension and core developer
- Simeon Nedelchev: Pseudo inertia and Log-Cholesky parametrization
- Ajay Sathya (Inria): core developer
If you have participated in the development of Pinocchio, please add your name and contribution to this list.
Open-source projects relying on Pinocchio
- Crocoddyl: A software to realize model predictive control for complex robotics platforms.
- TSID: A software that implements a Task Space Inverse Dynamics QP.
- HPP: A SDK that implements motion planners for humanoids and other robots.
- Jiminy: A simulator based on Pinocchio.
- ocs2: A toolbox for Optimal Control for Switched Systems (OCS2)
- TriFingerSimulation: TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- Casadi_Kin_Dyn: IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- PyRoboPlan: An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- ProxSuite-NLP: A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- Aligator: A versatile and efficient framework for constrained trajectory optimization.
- Simple: The Simple Simulator: Simulation Made Simple.
- LoIK: Low-Complexity Inverse Kinematics.
Acknowledgments
The development of Pinocchio is actively supported by the Gepetto team @LAAS-CNRS and the Willow team @INRIA.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Add parsing meshes with vertices for MJCF format (#2537)
Fixed
- Fix mjcf Euler angle parsing: use xyz as a default value for eulerseq compiler option (#2526)
- Fix variable naming in Python (#2530)
- Fix aba explicit template instantiation (#2541)
- CMake: fix RPATH on macos (#2546)
- Fix aba explicit template instantiation (#2541)
- Fix mjcf parsing of keyframe qpos with newlines (#2535)
- Fix sites parsing for MJCF format (#2548)
3.3.1 - 2024-12-13
Added
- Add
pinocchio_python_parsertarget (#2475)
Fixed
- Fix mjcf parsing of armature and of the default tag in models (#2477)
- Fix undefined behavior when using the site attribute in mjcf (#2477)
- Fix the type of image paths when loading textures in the meshcat visualizer (#2478)
- Fix meshcat examples ([#2503])[https://github.com/stack-of-tasks/pinocchio/pull/2503]
- Fix
pinocchio-test-cpp-parallel-geometrywhen built with Coal (#2502) - Fix scaling support for meshcat (#2511)
Changed
- On GNU/Linux and macOS, hide all symbols by default (#2469)
- Build
pinocchio_defaultwith collision features (#2517)
3.3.0 - 2024-11-06
Added
- Default visualizer can be changed with
PINOCCHIO_VIEWERenvironment variable (#2419) - Add more Python and C++ examples related to inverse kinematics with 3d tasks (#2428)
- Add parsing of equality/connect tag for closed-loop chains for MJCF format (#2413)
- Add compatibility with NumPy 2
__array__API (#2436) - Added argument to let users decide of root joint name when parsing models (urdf, mjcf, sdf) (#2402)
- Allow use of
pathlib.Path | strfor paths in python bindings (#2431) - Add Pseudo inertia and Log-cholesky parametrization (#2296)
- Add Pixi support (#2459)
Fixed
- Fix linkage of Boost.Serialization on Windows (#2400)
- Fix mjcf parser appending of inertias at root joint (#2403)
- Fix unit tests with GCC 13.3 (#2406
- Fix class abstract error for Rviz viewer (#2425)
- Fix compilation issue with MSCV and C++17 (#2437)
- Fix
pinocchio-test-py-robot_wrapperwhen building with SDF and collision support (#2437) - Fix crash when calling
Inertia::FromDynamicParametersin Python with wrong vector size (#2296) - Fix
examples/cassie-simulation.pyandexamples/talos-simulation.py(#2443) - Fix build with CppAd 2024 (#2459)
- Fix
pinocchio-test-cpp-mjcfunittest with Boost 1.86 (#2459) - Fix
pinocchio-test-cpp-constraint-variantsuninitialized values (#2459) - Fix mixing library symbols between Pinocchio scalar bindings (#2459)
- Fix bug for get{Joint,Frame}JacobianTimeVariation (#2466)
Changed
- Modernize python code base with ruff (#2418)
- Does not create a root_joint frame from parsed models (urdf, mjcf and sdf) when no root joint is provided (#2402)
3.2.0 - 2024-08-27
Fixed
- Append pinocchio optional libraries into pkg-config file (#2322)
- Fixed support of DAE meshes with MeshCat (#2331)
- Fixed pointer casts in urdf parser (#2339)
- Remove CMake CMP0167 warnings (#2347)
- Fixed urdfdom in ROS packaging (#2341)
- Fixed overview-urdf cpp example (#2384)
- Fixed mjcf model without a base link parsing (#2386)
- Fixed talos-simulation.py, simulation-contact-dynamics.py and simulation-closed-kinematic-chains.py examples (#2392)
Added
- Add getMotionAxis method to helical, prismatic, revolute and ubounded revolute joint (#2315)
- Add initial compatiblity with coal (coal needs
-DCOAL_BACKWARD_COMPATIBILITY_WITH_HPP_FCL=ON) (#2323) - Add compatibility with jrl-cmakemodules workspace (#2333)
- Add
collision_colorparameter toMeshcatVisualizer.loadViewerModel(#2350) - Add
BuildFromMJCFfunction to RobotWrapper (#2363) - Add more CasADi examples (#2388)
Removed
- Remove deprecated headers related to joint constraints (#2382)
Changed
- Use eigenpy to expose
GeometryObject::meshMaterialvariant (#2315) - GepettoViewer is no more the default viewer for RobotWrapper (#2331)
- Modernize python code base with ruff (#2367)
- Restructure CppAD and CasADi examples (#2388)
- Enhance and fix CppAD benchmarks outputs (#2393)
3.1.0 - 2024-07-04
Fixed
- Fix
appendModelwhen joints after the base are in parallel (#2295) - Fix
appendModelbuild when called with template arguments different than the ones fromcontext(#2284) - Fix
TransformRevoleTpl::rotationandTransformHelicalTpl::rotationbuild (#2284) - Fix compilation issue for Boost 1.85 (#2255)
- Fix python bindings of
contactInverseDynamics(#2263) - Deactivate
BUILD_WITH_LIBPYTHONwhen building with PyPy (#2274) - Fix Python bindings cross building with
hpp-fcl(#2288) - Fix build issue on Windows when a deprecated header is included (#2292)
- Fix build issue on Windows when building in Debug mode (#2292)
- Fix visualization of meshes in meshcat (#2294)
- Fix Anymal simulation test (#2299)
- Fix contact derivatives and impulse dynamics tests (#2300)
- Fix CMake compatibility with old console_bridge version (#2312)
Added
- Python unittest for
contactInverseDynamicsfunction (#2263) - Added helper functions to return operation count of CasADi functions. (#2275)
- C++ and Python unittest for
dIntegrateTransportto check vector transport and its inverse (#2273) - Add kinetic and potential energy regressors (#2282)
Removed
- Remove header
list.hppinclude for bindings of model and rnea (#2263)
3.0.0 - 2024-05-27
Added
Automatic differentiation
- Full support of Casadi in the main library by @jcarpent and @ManifoldFR
- Full support of Casadi for Python bindings by @jcarpent
- Full support of Boost.Multiprecision in the main library by @jcarpent
- Full support of Boost.Multiprecision for Python bindings by @jcarpent
- Full support of CppAD and CppADCodeGen in the main library by @jcarpent
- Full support of CppAD and CppADCodeGen for Python bindings by @jcarpent and @proyan
Core features
- Full support of constrained dynamical systems by @jcarpent
- Full support of derivatives of constrained dynamical systems by @jcarpent and @proyan
- Extended algorithms for constrained dynamics: constrained ABA, PV solvers, etc. by @jcarpent and @AjSat
- Add frictional contact solvers (PGS, ADMM) by @jcarpent
- Add contact inverse dynamics by @quentinll
- Full support of broadphase algorithms in Pinocchio by @jcarpent
- New joint supports (Helicoidal, Universal) by @fabinsch and @MegMll
- Add new algorithms for supporting Delassus factorizations for sparse, dense and tree-based systems by @jcarpent
- Add full OpenMP support for many algorithms (ABA, RNEA, collision detection, etc.) by @jcarpent
- Full support of GeometryModel, GeometryObject serialization by @jcarpent
- Extended support of Meshcat by @jcarpent, @ManifoldFR and @jorisv
- Extended testing and support of Lie groups operations by @jcarpent and @ManifoldFR
- Full support of AVX512 and AVX2 vectorization for Python bindings by @jcarpent
- Full support of the robot armature in RNEA, CRBA and ABA
- Extended formulation of CRBA and ABA using WORLD convention for reduced computational burden in the derivative algorithms
Parsers
Extra Algorithms
- Added reachable workspace computation and vizualisation in collaboration with @askuric based on pycapacity by @MegMll and @jorisv
Packaging
- Full support of template instantiation by @fabinsch and @jorisv
- Enhance support for Windows-based systems by @jorisv
- Splitting of the Pinocchio into sub-library for isolation by @jorisv
Compatibility
- Add
PINOCCHIO_ENABLE_COMPATIBILITY_WITH_VERSION_2define to activate compatibility with Pinocchio 2 API
Changed
C++
- Change minimum required version of C++ to C++11. Check for compatibility here: https://en.cppreference.com/w/cpp/compiler_support/11
- Replace
pinocchio::BiasZeroTplbypinocchio::MotionZeroTpl - Replace
pinocchio::fusion::JointVisitorBasebypinocchio::fusion::JointUnaryVisitorBase - Replace
pinocchio::fusion::push_frontbypinocchio::fusion::append - Replace
pinocchio::regressor::computeStaticRegressorbypinocchio::computeStaticRegressor - Replace
pinocchio::jointJacobianbypinocchio::computeJointJacobian - Replace
pinocchio::frameJacobianbypinocchio::computeFrameJacobian - Replace
pinocchio::framesForwardKinematicsbypinocchio::updateFramePlacements - Replace
pinocchio::kineticEnergybypinocchio::computeKineticEnergy - Replace
pinocchio::potentialEnergybypinocchio::computePotentialEnergy - Replace
pinocchio::computeCentroidalDynamicsbypinocchio::computeCentroidalMomentumandpinocchio::computeCentroidalMomentumTimeVariation - Replace
pinocchio::centerOfMass(const ModelTpl&, DataTpl&, int, bool)bypinocchio::centerOfMass(const ModelTpl&, DataTpl&, KinematicLevel, bool) - Replace
pinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, int)bypinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, KinematicLevel) - Replace
pinocchio/algorithm/dynamics.hppbypinocchio/algorithm/constrained-dynamics.hpp - Change the order of arguments in some of
pinocchio::GeometryObject’s constructors - Deprecate
pinocchio/algorithm/parallel/geometry.hppmoved atpinocchio/collision/parallel/geometry.hpp - Deprecate
pinocchio/spatial/fcl-pinocchio-conversions.hppmoved atpinocchio/collision/fcl-pinocchio-conversions.hpp - Deprecate
pinocchio/parsers/sample-models.hppmoved atpinocchio/multibody/sample-models.hpp - Deprecate
pinocchio/math/cppad.hppmoved atpinocchio/autodiff/cppad.hpp - Deprecate
pinocchio/math/cppadcg.hppmoved atpinocchio/autodiff/cppadcg.hpp - Deprecate
pinocchio/math/casadi.hppmoved atpinocchio/autodiff/casadi.hpp - Deprecate
pinocchio::FrameTpl::parentreplaced bypinocchio::FrameTpl::parentJoint - Deprecate
pinocchio::FrameTpl::previousFramereplaced bypinocchio::FrameTpl::parentFrame - Deprecate
pinocchio/algorithm/contact-dynamics.hppalgorithms replaced bypinocchio/algorithm/constrained-dynamics.hpp
Python
- Replace
pinocchio.utils.skewbypinocchio.skew - Replace
pinocchio.utils.se3ToXYZQUATbypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.utils.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.robot_wrapper.RobotWrapper.frameClassicAccelerationbypinocchio.robot_wrapper.RobotWrapper.frameClassicalAcceleration - Replace
pinocchio.robot_wrapper.RobotWrapper.jointJacobianbypinocchio.robot_wrapper.RobotWrapper.computeJointJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.frameJacobianbypinocchio.robot_wrapper.RobotWrapper.computeFrameJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.initDisplaybypinocchio.robot_wrapper.RobotWrapper.initViewer - Replace
pinocchio.robot_wrapper.RobotWrapper.loadDisplayModelbypinocchio.robot_wrapper.RobotWrapper.loadViewerModel - Replace
pinocchio.deprecated.se3ToXYZQUATtuplebypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.deprecated.se3ToXYZQUATbypinocchio.SE3ToXYZQUAT - Replace
pinocchio.deprecated.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.deprecated.buildGeomFromUrdf(model, filename, [str])bypinocchio.buildGeomFromUrdf(model, filename, type, package_dirs, mesh_loader) - Replace
pinocchio.rpy.npToTTuplebypinocchio.utils.npToTTuple - Replace
pinocchio.rpy.npToTuplebypinocchio.utils.npToTuple - Replace
pinocchio.jacobianSubtreeCoMJacobianbypinocchio.jacobianSubtreeCenterOfMass
Removed
C++
- Remove
pinocchio::setGeometryMeshScales - Remove some
pinocchio::forwardDynamicssignatures - Remove some
pinocchio::impulseDynamicssignatures
Python
- Remove
pinocchio.utils.cross - Remove
pinocchio.robot_wrapper.RobotWrapper.initMeshcatDisplay - Remove
pinocchio.deprecated.setGeometryMeshScalesbypinocchio
2.7.1 - 2024-04-26
Changed
- Modify algorithm that appends a model to another (#2218)
- Set NOMINMAX as a public definitions on Windows (#2139)
- Improve documentation of
enum ReferenceFrame(#2190) - Improve documentation of
getJointJacobian(#2193).
Fixed
- CMake now uses Relative Path instead of Absolute (#2202)
- Order of frames in
ReducedModelis now the same as in the full model (#2160) - Remove a lot of warnings (#2139)
-
MeshcatVisualizerdoesn’t crash anymore when there is no collision model defined (#2147) - Fix MSVC build (#2155)
- Fix stub generation (#2166)
- Clean up empty documentation pages and sections (#2167)
- Fix SO(3) title and cross-section reference in the documentation (#2210)
Added
- Add
examples/floating-base-velocity-viewer.pyto visualize floating base velocity (#2143) - Add remark to the documentation of
getFrame(Classical)Accelerationfunctions (#2169) - Allow use of installed jrl-cmakemodules (#2216)
2.7.0 - 2024-01-23
Added
- Add
GeometryObject::meshMaterialattribute (#2084) - Add Parser for mujoco mjcf models
pinocchio::mjcf::buildModelandpinocchio::mjcf::buildGeom
Fixed
- Use bp::ssize_t for recent version of Windows compilers (#2102)
- Fix missing include for Boost >= 1.83 (#2103)
- Remove f-strings to fix install with python 2 (#2110)
- CMake: stop exporting CppAd/cppadcodegen & fetch submodule if not available (#2112)
- Fix malloc issue in CRBA algo (#2126)
- Fix build cppad and cppadcg with Boost < 1.77 (#2132)
2.6.21 - 2023-11-27
Added
- Add inverse dynamics (
rnea) Python and C++ example (#2083) - Add visualization of Frames in MeshCat viewer (#2098)
Fixed
- Re-initialize
Ycrb[0]incrbaMinimal(#2040) - Fix custom scalar use in
logfunction (#2047) - Raise exception on wrong input size in
XYZQUATToSE3Python binding function (#2073) - Remove memory leak in
buildGeomFromUrdfandbuildGeomFromUrdfStringPython binding functions (#2082https://github.com/stack-of-tasks/pinocchio/pull/2082) - Fix Panda3D viewer examples (#2087)
- Fix centroidal dynamics derivatives with respect to time (#2094))
Changed
- Rename freeflyer_joint to root_joint in
humanoidsample model (#2043) - CMake minimal version is now 3.10 (#2055)
- Split headers and sources in different directories to have a more standard C++ project (#2070)
Removed
- Remove support to
hpp-fcl< v2.0.0 (#2086)
2.6.20 - 2023-08-09
What’s Changed
- Fix support of recent versions of Boost for CppAD and CppADCodeGen by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2000
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 1e0c5aff1147d50d58bf4185a55ff564c9b6e027 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2007
- Enabled copy and deepcopy by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1882
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 9f963f67ebb889792175776c5ee00134d7bb569b by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2013
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2029
2.6.19 - 2023-06-19
What’s Changed
- Add Motion::toHomogeneousMatrix by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1946
- The insatiable English teacher PR 🧙 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1957
- require C++14 for Boost >= 1.81 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1949
- CMake: an example require python 3 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1966
- Fix IK example in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1963
- Issue templates by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1971
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1976
- Enhance CMake packaging for Windows by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1984
- Documentation by @drewhamiltonasdf in https://github.com/stack-of-tasks/pinocchio/pull/1986
- Add support for ccache on Conda build by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1987
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1988
- Enhance compatibility with new Python versions by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1996
New Contributors
- @drewhamiltonasdf made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1986
2.6.18 - 2023-04-29
What’s Changed
- Support force in pybind11 by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1868
- Fix some Python bindings signatures and add stub generation. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1869
- Fix IK example by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1875
- Remove empty examples by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1878
- build(deps): bump ros-industrial/industrial_ci from 6a8f546cbd31fbd5c9f77e3409265c8b39abc3d6 to 4b78602d67127a63dce62926769d9ec4e2ce72e4 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1890
- add static-contact-dynamics example by @PepMS in https://github.com/stack-of-tasks/pinocchio/pull/1891
- Update documentation of
JointModel.shortnamein python bindings by @Danfoa in https://github.com/stack-of-tasks/pinocchio/pull/1892 - update doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1898
- Document that joints need to be added in depth-first order by @traversaro in https://github.com/stack-of-tasks/pinocchio/pull/1899
- fix INSTALL_RPATH on ROS & OSX by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1908
- Python example: update joint placements after loading a URDF by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1911
- Remove more empty sections from the docs by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1912
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1914
- update doc for fixed joint by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1920
- doc: more information about frames on cheatsheet by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1930
- Define operational frames in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1929
- Remove support of np.matrix by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1941
- Fix other np.matrix issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1942
New Contributors
- @PepMS made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1891
- @Danfoa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1892
2.6.17 - 2023-02-15
What’s Changed
- Fix Jlog6 documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1857
- Add documentation to Jlog3 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1858
- [python/visualize] Extend visualizer features and implement them for MeshcatVisualizer by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1845
- Second-order RNEA derivatives by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1860
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1863
- Fix support of AVX2. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1865
2.6.16 - 2023-02-02
What’s Changed
- Enforce testing of Python bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1853
- Fix issue with Python 3.6 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1855
2.6.15 - 2023-01-31
What’s Changed
- More documentation for getJointJacobian by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1836
- Error when integrating SE3 with the same vector given as input and output by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1775
- Documentation for Jlog6 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1842
- remove useless header by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1846
- Fix issue with recent change on master branch for ROS-CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1847
- Fix issue with old version of Boost and eigenpy >= 2.9.0 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1851
2.6.14 - 2023-01-13
What’s Changed
- Fix registration of ptr to Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1832
2.6.13 - 2023-01-12
What’s Changed
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1790
- Skip collision pairs between geom on same joint in appendGeometryModel by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1791
- Fix issue with Boost 1.78 on OSX systems by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1792
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1793
- Add helper functions for computing supported inertia and force by frames by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1796
- Follow-up : Supported inertia by frame by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1797
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1799
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1801
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1802
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1809
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1811
- Fix Python issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1821
- Allow to use std::shared_ptr by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1822
2.6.12 - 2022-11-06
What’s Changed
- Elevate check for ambiguous input argument to an exception by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1781
- Fix packaging issues + sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1782
- Fix issue with clang by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1784
2.6.11 - 2022-10-25
What’s Changed
- URDF: fix loading relative mesh path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1748
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1750
- Add @note to difference documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1753
- Configuration limits for joints and model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1756
- Address remaining warnings + speed-up build for BUILD_TESTING=OFF by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1764
- Add status of ROS builds to README by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1770
- pinocchio/visualize: Add support for cone shape in meshcat dispaly by @whtqh in https://github.com/stack-of-tasks/pinocchio/pull/1769
- Updates README by @nikoandpiko in https://github.com/stack-of-tasks/pinocchio/pull/1776
- Enhance cmake packaging by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1777
New Contributors
- @stephane-caron made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1753
- @whtqh made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1769
- @nikoandpiko made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1776
2.6.10 - 2022-09-14
What’s Changed
- fix syntax for python 2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1734
- Expose
removeGeometryObjectin python binding by @Jiayuan-Gu in https://github.com/stack-of-tasks/pinocchio/pull/1736 - Fix relocalable by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1738
- Fix relative path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1742
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1744
New Contributors
- @Jiayuan-Gu made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1736
2.6.9 - 2022-08-12
What’s Changed
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1669
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1670
- Sync example-robot-data by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1671
- update to pybind11 v2.9.2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1674
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1678
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1677
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1679
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1692
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1691
- Fix bug in appendModel by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1693
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1695
- Fix geometry color default value by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1699
- Add python example appending Urdf and another model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1698
- SO3 diff impl use quaternion instead of rotation matrix by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1702
- add cheat sheet to doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1705
- cmake/utils: no need for python here by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1709
- Add header only target by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1712
- cmake: relocatable package for recent CMake versions by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1716
- cmake: modernize header-only lib by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1718
- ROS2/Colcon integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1719
- CMake: update to eigenpy 2.7.10 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1720
- Fix weird test failure on Conda by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1723
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1727
- ROS2 release support by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1681
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1732
New Contributors
- @fabinsch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1698
2.6.8 - 2022-06-06
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1648
- Fix integrate method for SO2 by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1652
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1653
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1658
- Extend current Coriolis computations to account for Cristoffel symbol of first kind by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1665
- Fix method play() of rviz_visualizer by @danielcostanzi18 in https://github.com/stack-of-tasks/pinocchio/pull/1667
- chore: Included githubactions in the dependabot config by @nathannaveen in https://github.com/stack-of-tasks/pinocchio/pull/1659
- Enable ubuntu 22.04 on CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1668
New Contributors
- @pre-commit-ci made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1648
- @Toefinder made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1652
- @danielcostanzi18 made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1667
- @nathannaveen made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1659
2.6.7 - 2022-05-03
What’s Changed
- add dummy .pre-commit-config.yaml by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1629
- Avoid triggering multi-line comment in Latex formula by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1630
- Make Pinocchio v2 compatible with HPP-FCL v2 by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1631
- Add example of collision with a point cloud by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1636
- follow up on hpp-fcl v2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1637
- Fix pickling for Boost >= 1.7.4 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1640
2.6.6 - 2022-03-22
What’s Changed
- Support HPP-FCL for ROS binaries & introduce ROS2 ament integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1622
2.6.5 - 2022-02-14
What’s Changed
- Fix warning issue in Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1546
- RVizVisualizer update by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1549
- Correct link to examples. Removed python subdirectory in the link as the directory does not exist anymore by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1561
- Add CONTRIBUTING.md file for newcomers by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1563
- Add list of projects based on Pinocchio by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1566
- Fix constrained dynamics formula by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1567
- Append “/share” to AMENT_PREFIX_PATH by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1568
- Expose dIntegrateTransport by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1572
- [timings] Reduce allocations in finite-difference baselines by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1583
- [computeAllTerms] Add missing noalias to avoid temporary allocation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1582
- Missing
noaliasby @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1585 - [multibody/model] add joint arg validation by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1586
- [multibody/geometry] Add method to remove an object. by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1588
- Fix bug in ABAChecker by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1599
- Update README.md by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1604
- allow
robot_wrapperto share data with itsvizby @vnghia in https://github.com/stack-of-tasks/pinocchio/pull/1606
New Contributors
- @duburcqa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1585
- @vnghia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1606
2.6.4 - 2021-11-02
What’s Changed
- Change ‘typedef’ to ‘using’, add curly braces by @the-raspberry-pi-guy in https://github.com/stack-of-tasks/pinocchio/pull/1476
- [CMake] set INSTALL_RPATH for python on linux by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1482
- [visualize] captureImage() method by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1480
- ci: update ROS CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1483
- Fix issue with Pool when FCL is missing by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1485
- fix module name by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1487
- Add RVizVisualizer by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1488
- fix reshape issues by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1489
- Remove useless reference to L-GPL + remove of useless files by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1500
- Update old function, remove mobile robot wrapper by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1490
- Allows the display of {COLLISION,VISUAL} in MeshCat by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1502
- Delete submodule travis by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1509
- Add citation by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1511
- badges: add PyPI by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1510
- Add support of Convex within MeshCat + improve GeometryObject bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1530
- [python] Fix BaseVisualizer constructor. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1533
- [python] Add pybind11 header. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1519
- make copy of supports during model cast by @rubengrandia in https://github.com/stack-of-tasks/pinocchio/pull/1536
- [python] Simplify buildGeomFromUrdf and allow to build from string. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1538
- Sync submodule by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1542
- Turn off automatic documentation generation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1541
New Contributors
- @the-raspberry-pi-guy made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1476
- @ManifoldFR made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1480
- @EtienneAr made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1488
- @kozakromch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1489
- @rubengrandia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1536
2.6.3 - 2021-07-27
This new release fixes bugs in MeshCat rendering, loading of ROS path and in the Centroidal dynamics derivatives
2.6.2 - 2021-07-05
This new release provides fixes include orders in the unit tests due to recent versions of Boost. It also provides more content to the Readme. This new release prefigures the new Pinocchio 3.x
2.6.1 - 2021-06-08
Enhancement:
- extended support of serialization of FCL primitives
- extended support of Boost.Variant in Python
Fixes:
- fix bug when loading URDF on Windows
- fix handling of Frame inertia
2.6.0 - 2021-04-11
This new release provides:
- improvement for handling collision/distance requests
- support of parallel computations for ABA, RNEA and collisions algorithms (more to come soon)
- additional features for the RobotWrapper in Python
- support of Capsule for Meshcat
- happened Inertia information to Frames
- fixes for doc issues
- improve numerical robustness when two inertias are Zero
2.5.6 - 2021-01-23
This new release comes with a more consistent ABA algorithm (data.a_gf used instead of classic data.a) and more outcomes for computeAllTerms. In addition, it provides some extended supports to PyPy.
2.5.5 - 2021-01-07
This maintenance release enhances the whole CMake packaging of the project and provides additional features for the Python bindings.
2.5.4 - 2020-11-26
This new release enhances the compatibility of Pinocchio with former distributions, provides better support to Euler angles and fixes some bugs.
2.5.3 - 2020-11-13
This new release fixes some issues with the Python bindings, add new examples and extend the whole tests.
2.5.2 - 2020-11-02
This new release enhances the compatibility with Windows, provides new tools eitheir to work on joint configurations and also to compute the kinematic regressors.
2.5.1 - 2020-10-12
This new release provides:
- improvements on the whole project coverage
- better support of Windows v142
- support of joint friction and damping (only at the interface level)
- new algorithm to retrieve the Coriolis matrix from RNEA/ABA derivatives
2.5.0 - 2020-08-31
In this new release, we have:
- a full memory shared in the Python bindings, i.e. that all the Eigen object can now be changed in Python.
- better handling of multiprecision arithmetic
- improved CMake packaging
- fix for Autodiff
2.4.7 - 2020-07-20
This new release provides:
- an extended API for dealing with Lie groups and the related computations (integration, difference, derivatives, etc.)
- the Lie groups have now their Python bindings for easy code prototyping
- the kinematics derivatives of the Frames have been introduced as well as the extension of current Joints derivatives
- the packaging of the project has been improved too.
2.4.6 - 2020-06-15
This new release of Pinocchio removes the use of pkg-config to check dependencies and provides a full compatibility and support for Windows systems.
2.4.5 - 2020-05-23
This new release extends the current frames algorithms to also consider the LOCAL_WORLD_ALIGNED reference frame. It also exposes the values of the enum_ for simplified usage.
2.4.4 - 2020-05-13
This new release provides:
- new helpers function to retrieve frame velocities and accelerations
- for each collision pair, it is now possible to provide specific collision checking settings
- support to display convex hulls in viewers
It also fixes:
- the support of Panda3d
and enhances the global CMake packaging of the project.
2.4.3 - 2020-04-24
This new release provides a new Viewer, named Panda3d, for easy code visualization in Python. It also provides additional fixes to the Code Generation support.
2.4.2 - 2020-04-21
This new release of Pinocchio provides new features for dealing with Lie groups:
- improved operations over the differential operations of the integrate function
- new functions for transporting some matrix between the two endpoints of the integrate function
- the RPY functions are now robust over singularities
- the support of autodiff frameworks has been improved to also cope with Lie groups features
This release also provides:
- a packaging fixe with respect to the URDFDOM dependency
- the Python bindings should now be without memory leak
2.4.1 - 2020-04-15
This new release fixes a bug introduced in Pinocchio 2.4.0 concerning the method ModelTpl::addFrame. This release also provides better support for the checking of the CppAD and CppADCodeGen versions.
2.4.0 - 2020-04-09
This new release of Pinocchio makes several improvements:
- improve compatibility with hpp-fcl
- improve compatibility with CppAD and notably the Lie algebra features
- a better CMake >= 3.0 export of the project
- new examples for Code generation
- improved Python bindings
- improved support for Boost.Multiprecision
- reduce the memory usage when compilation unit tests
and we have started to move some dependencies like urdfdom to the pinocchio.so library to avoid additional compilations issues and to useless compilations burden.
2.3.1 - 2020-02-20
This new release provides:
- some fixes with respect to minor bugs introduced in Pinocchio 2.3.0
- an enhance detection of Python
- improves the compilation memory overhead
2.3.0 - 2020-02-18
This new release provides:
- full compatibility with CMake export
- full compatibility with Numpy.Array
- examples for Code generation
- better support of C++11
- minor bug fixes
- improves coverage
- uniformizes function signature
- improves interoperability between Numpy and Pinocchio
- add many examples
- full integration of Python bindings of hpp-fcl
- supports the pickling and the serialization of Data
2.2.3 - 2019-12-30
This new release provides:
- pickling and serialization of Data structures
- provide new algorithms to create reduce models
It also improves the compatibility with the Transform used in HPP-FCL. It also fixes various bugs. It also comes with new and detailed examples.
2.2.2 - 2019-12-11
This new release:
- improves the compatibility with HPP-FCL bindings
- improves the documentation of the project with more examples
- fixes some bugs related to Eigen
- add new algorithms to compute the centroidal matrix and its time derivatives
2.2.1 - 2019-11-25
This new release fixes the ROS package version number and updates the robot models.
2.2.0 - 2019-11-25
This new release of Pinocchio introduces:
- analytical formula for Hessian of the kinematics
- derivatives of the difference operation
- new derivatives for static torque quantity
- new models for tests and examples.
It adds some signature non-exposed in Python. It also deletes outdated function signatures that have been deprecated in 2.0.x versions. It also improves the packaging with respect to ROS or other robotics frameworks.
2.1.11 - 2019-10-27
This release fixes missing update of the ROS package.xml file with the new version.
2.1.10 - 2019-10-25
This new release allows throwing when some input arguments are not fulfilled (useful feature in Python). It also provides new support for Hessian of the kinematics. Finally, the project is now packaged for ROS integration.
2.1.9 - 2019-10-09
This is a maintenance release, with some fixes concerning the contact dynamics, better support of LOCAL_WORLD_ALIGNED option and fixes with respect to some recent versions of CppADCodeGen.
2.1.8 - 2019-09-30
This is a maintenance release providing several fixes:
- remove memory allocation in ABA derivatives with contact forces
- better handling of boost::Variant
- better support of Majax
It also provides new features in the documentation of mathematical formula.
2.1.7 - 2019-09-10
This new release improves:
- the support of AutoDiff frameworks
- the efficiency of some core algorithms
fixes:
- the support of Majax
- the compatibility with Python 2/3
2.1.6 - 2019-08-05
This new release improves the packaging of the project and provides new algorithms to compute the Jacobians of the center of mass of each subtree.
2.1.5 - 2019-07-16
This new release provides support for JointMimic and JointRevoluteUnboundedUnaligned. It also comes with the full support of CasADi.
Thanks to @mkatliar for helping us to provide this support.
2.1.4 - 2019-06-22
This new release provides some fixes with respect to Python bindings, C++17 as well as new important features:
- dynamic regressor for identification
- add support of multiple viewers
- improve analytical derivatives
2.1.3 - 2019-04-30
This new release fixes some issues with Python 3 and C++17 standard. It also provides additional documentation, enlarges the current Python bindings and uniformizes naming convention in Python.
2.1.2 - 2019-04-05
This new release aims at fixing compilations issues when COLLISION module is activated. It also provides some fixes concerning the loading of meshes.
A new feature provided by this release concerns the possibility of appending two models together.
2.1.1 - 2019-03-27
This new release fixes compatibility bugs with previous release 2.1.0. It also provides a serialization interface for Spatial classes and the Model class.
2.1.0 - 2019-02-27
This new release makes some major improvements:
- it is now possible to use MeshCat, another viewer working in the browser directly in Python
- the Python bindings are now hardly tested and uniformized with respect to the C++ API
- this new release is compatible with recent releases of
hpp-fcl - the SRDF parsing has been improved. Its now possible to load several reference configuration vectors
We also fixed bugs related to recent versions of Boost mostly.
2.0.0 - 2019-01-11
Welcome Pinocchio 2.0.0.
This release makes official the last important and new features for efficiently computing the dynamics of the rigid body systems:
- Analytical derivatives
- Automatic differentiation
- Full scalar type overloading
- Code generation among others
1.3.3 - 2018-10-29
This is for real the last release before Pinocchio 2.0.0 and more.
This release fixes the packaging when hpp-fcl is missing. Thanks to @aelkhour for raising this issue.
1.3.2 - 2018-10-26
This release is the last one before Pinocchio 2.0.0.
It mostly:
- fixes issues introduced by new API of frame functionalities;
- introduces new sample models for manipulator and humanoid systems;
- fixes bugs due to boost 1.58.0;
- improve the readme with credits section.
1.3.1 - 2018-09-25
This new release corrects some bugs or bad deprecations concerning Pinocchio 1.3.0.
1.3.0 - 2018-08-28
This new release introduces analytical derivatives in the corpus of Pinocchio. This feature is still under development but can already be used both in C++ and Python.
This new release also fixes a bunch of bugs related to Eigen and Boost.
1.2.9 - 2018-06-01
This is mostly a maintenance release:
- Fix bug in. lower bounds in Model class
- Update documentation structure (additional work is needed)
- Improve the compatibility with Python 3.x
1.2.8 - 2018-05-18
This is mostly a maintenance release:
- Fix some bugs in JointModel{Translation,Spherical} for ABA algorithm
- Fix a duplication issue in RobotWrapper
- Improve compatibility with recent version of Boost >= 1.67.0
- Romeo is now loaded from the official romeo_description repository
1.2.7 - 2018-04-03
This is mostly a maintenance release:
- Fixes and computation improvements for Lie group operations.
- Adding pickle for spatial classes.
- Allow loading of URDF tree directly from an XML stream.
1.2.6 - 2018-01-15
This is mostly a maintenance release with various fixes to comply with Boost variadic macro on recent OS. It also adds new convention with a LOCAL and a WORLD frame to express Jacobian quantities.
1.2.5 - 2017-10-10
This a maintenance Release. We added some algo to compute the time variation of the Jacobians together with the variation with respect to time of the centroidal momemtum matrix. HPP-FCL works now with Eigen for linear algebra.
1.2.4 - 2017-06-09
This is mostly a maintenance release, with some fix with respect new urdfdom versions, it handles Eigen support with hpp-fcl.
1.2.3 - 2017-02-14
This release fixes some issues with respect to 1.2.1.
API modifications
Interpolate, Differentiate, Integrate are now algorithmic struct which can be efficiently overloaded.
Bindings
Add FCL object bindings
1.2.1 - 2016-10-17
Summary
This release is a minor patch of the previous release 1.2.0.
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New
- The Python bindings are aligned and free of unnecessary allocations
- Add documentation option which allows to not install the documentation
- Introduces container::aligned_vector to automatically create an std::vector with specific aligned allocator
API modifications
- Remove JointDense.
- Remove JointGeneric
Fixes
- Solves the parsing of geometries in URDF module
- Fixes alignment issues on 32 bits architecture
1.2.0 - 2016-09-29
Summary
The main modifications concern the update of the code to comply with the Humanoid Path Planner (HPP).
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Add Joint{Model,Data} classes based on Joint{Model,Data}Base and Joint{Model,Data}Variant. Those classes call directly the visitors and make Variant accessible throw methods
- Add partial Joint{Model,Data}Composite. They allow a stack of joints without adding any Inertia.
- Increase Frame class. Frames can be of several types (BODY, JOINT, SENSOR, etc) and reflect the robot tree as it appears in the URDF conventions. Frames have two attributes: parent which the direct Joint parent in the Joint tree, previousFrame which correspond to the parent Frame in the tree of Frames).
- Adding Python parser which is able to read models written in Python.
- Add algo checker to check the validity of a model.
- Improve documentation.
API modifications
- Model has some methods deprecated. The default name has been removed.
- The Geometry classes have been updated and several methods have been set to deprecated. They now use Frames as parent instead of Joint directly: a Geometry is now supported by a BODY.
- Add active collision pair flags in GeomData which define the active collision pairs.
- Unify naming conventions (nframes, njoints, etc).
Fixes
- The UDRF parser can now deal with more complex topologies. It properly handles the stack of geometries for each BODY.
- Improve packaging mainly around the Python part.
1.1.2 - 2016-05-31
Summary
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Added operational frames (that are a Plucker coordinate frame attached to a parent joint inside a kinematic tree). Position and Jacobian of such frames can be computed
- Geometry primitives can now be handled (and added to the Pinocchio GeometryModel) when encountered in an urdf file
- Implemented simple srdf parsing for GeometryData : parse the desactivated collision pairs
- Added Articulated Body Algorithm (ABA), and CCRBA
- When parsing a urdf file, now look in the environment variable ROS_PACKAGE_PATH for directories where to search for meshes. Users can provide hint directories to search in as a priority. Updated python RobotWrapper consequently
- Added forward dynamics with contact algorithm
- Added algorithms working with vectors of configuration or velocity(either on a JointModel or on a Model, iterating through all the kinematic tree)
- One can integrate a configuration at a constant velocity during a unit time
- One can differentiate two configurations (i.e compute the velocity that must be integrated during a unit time to go from first configuration to the other )
- One can interpolate between two configurations
- One cancompute the distance between two configurations ( such as dist = norm ( difference) )
- One can shoot a configuration uniformly sampled between specified limits
- Added Impulse Dynamic Algorithm
- Completed the list of method to access or call Joint’s data or method when joint are stored in a variant.
- Added JointAccessor that is a general joint encapsulating a JointVariant ( abstracting the use of visitors for the user).
API modifications
- Moved limits from joint models to Model as vectors of size nq for position limits and size nv for velocity and effort limits
- The Geometry objects stored in GeometryModel are now splitted in two types : visual and collision
Minor
- Improved documentation of Data, Model, Spatial Classes
- Improved efficiency when executing algorithms
- One can now create Inertia for simple shapes such as cylinders, boxes, ellipsoid
- Rework some unittests to increase to coverage of whole package ( C++ and Python )
Bugs Fixed
- Fixed operator Inertia x constraint in JointSphericalZYX
- Fixed the Dense conversion of joints (models and datas)
- Fixed bugs in JointRevoluteUnaligned and JointPrismaticUnaligned to access the access when visiting a variant containing such joints with boost::fusion
1.1.0 - 2016-02-04
Summary
New Features
- Spatial classes now follow the CRTP Design Pattern, for performance reasons.
- JointModels are now exposed in Python. This feature enables one to load a URDF model with a precise root joint and to create his/her own model.
- Python models can now be created by hand ( ex: buildEmptyModel() + calls to addBody() )
- Added utility tools to check an urdf model ( same as check_urdf but dislpay the Pinocchio model created from urdf parsing)
- Add unaligned prismatic joint
- Add geometry through Flexible Collision Library (hpp-fcl)
- Add dedicated structs to handle geometry. GeometryModel (list of geometry objects and its relation wrt kinematic model) and GeometryData
- When parsing urdf, meshes can be read from collada files and handled in Pinocchio
- Created parser that handles geometry and exposed it in python
- Add algorithms to update the geometry kinematics, to compute the distances for pairs of collision or if they are colliding or not.
- Added algorithms to compute the kinetic energy, the potential energy and exposed it in python
- The complete documentation is in progress
API modifications
- Change name of kinematics algorithms: now forwardKinematics instead of previous geometry, kinematics and dynamics.
Minor
- SimpleHumanoid is now built with joint limits
- Handle floating joints in urdf parsing
- Slight separation between joints and body in Model to avoid confusion
- Internally, Motion and Force classes now use a 6D-vector instead of two 3D-vectors for linear and angular part
Bugs Fixed
- Fixed a bug when trying to merge a link with its parent in case of fixed joint. Now merge only if it has an inertial tag.
- All the algorithms are now set to inline
- Fix compilation errors
Installation
The source of the release are available in the file pinocchio-1.1.0.tar.gz just below along with a binary version for 64-bits Debian architecture of Pinocchio **pinocchio_1.1.0amd64.deb** and its dependencies. For information, those packages will be installed in _/opt/openrobots directory.
1.0.2 - 2015-09-14
Summary
New Features
- The limits in position, velocity and torque for joints Revolute and Prismatic are now parsed from urdf model and accessible
- Implementation of exp and log functions on SE3 in C++ with its python binding thanks to @aelkhour
- Data now contains information relative to the center of mass position, velocity and acceleration
- Add Lua parser - compatible with RBDL
- Add translational joint
- Add planar joint
Minor
- Reduction of compilation warnings.
Bugs Fixed
- Fixed bug in operator Y*S in JointRevoluteUnaligned
1.0.0 - 2015-04-03
The following algorithms are implemented. • Recursive Newton-Euler algorithm (RNEA, i.e inverse dynamics) • Composite Rigid Body algorithm (CRBA, i.e generalized inertia matrix) • Sparse Cholesky decomposition of the inertia matrix (for constrained forward-dynamics resolution) • Placement Jacobians (i.e application from configuration velocities to end-effector spatial velocities), along with computation of body placements, velocities and accelerations. • Center of mass and its Jacobian
The model can either be parsed from a URDF format or be created by appendending bodies. The following joint models are implemented. • Revolute X, Y, Z (optimized) and unaligned with Cartesian directions • Prismatic X, Y, Z • Spherical (with and withoug singularities) • FreeFlyer (i.e. no constraint, for mobile robots like humanoids – using quaternion representation for the rotation) • Fixed (concatenation of two consecutive bodies)
Wiki Tutorials
Dependant Packages
| Name | Deps |
|---|---|
| exotica_pinocchio_dynamics_solver |
Launch files
Messages
Services
Plugins
Recent questions tagged pinocchio at Robotics Stack Exchange
Package Summary
| Tags | No category tags. |
| Version | 3.3.1 |
| License | BSD-2 |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stack-of-tasks/pinocchio.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2025-01-13 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Justin Carpentier
- Wolfgang Merkt
Authors
![]()
![]()
![]()
![]()
Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone’s algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
Pinocchio was first tailored for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.). It is built upon Eigen for linear algebra and FCL for collision detection. Pinocchio comes with a Python interface for fast code prototyping, directly accessible through Conda.
Pinocchio is now at the heart of various robotics software as Crocoddyl, an open-source and efficient Differential Dynamic Programming solver for robotics, the Stack-of-Tasks, an open-source and versatile hierarchical controller framework or the Humanoid Path Planner, open-source software for Motion and Manipulation Planning.
If you want to learn more about Pinocchio internal behaviors and main features, we invite you to read the related paper and the online documentation.
If you want to dive into Pinocchio directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
Table of contents
- Table of contents
- Introducing Pinocchio 3
- Pinocchio main features
- Documentation
- Examples
- Tutorials
- Pinocchio continuous integrations
- Performances
- Ongoing developments
- Installation
- Visualization
- Citing Pinocchio
- Questions and Issues
- Credits
- Open-source projects relying on Pinocchio
- Acknowledgments
Introducing Pinocchio 3
Pinocchio3 is the latest major release of Pinocchio. It comes with multiple new features, such as:
- Sparse constrained dynamics and its analytical derivatives
- Full support of closed-loop mechanisms
- State-of-the-art frictional contact solvers
- Low-complexity constrained articulated body algorithms
- Full support of multiple-precision floating-point (MPFR) in Python and C++
- Full CasADi support in Python and C++
- Increased support of CppAD and CppADCodeGen
- New SDF and MJCF parsers
- and much more.
Pinocchio main features
Pinocchio is fast:
- C++ template library,
- cache friendly,
- automatic code generation support is available via CppADCodeGen.
Pinocchio is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- support multiple precision arithmetic via Boost.Multiprecision or any similar framework,
- computations of kinematic and dynamic regressors for system identification and more,
- and much more with the support of modern and open-source Automatic Differentiation frameworks like CppAD or CasADi.
Pinocchio is flexible:
- header only,
- C++ 98/03/11/14/17/20 compliant.
Pinocchio is extensible. Pinocchio is multi-thread friendly. Pinocchio is reliable and extensively tested (unit-tests, simulations, and real-world robotics applications). Pinocchio is supported and tested on Windows, Mac OS X, Unix, and Linux (see build status here).
Documentation
The online Pinocchio documentation of the last release is available here. A cheat sheet pdf with the main functions and algorithms can be found here.
Examples
In the examples directory, we provide some basic examples of using Pinocchio in Python. Additional examples introducing Pinocchio are also available in the documentation.
Tutorials
Pinocchio comes with a large bunch of tutorials aiming at introducing the basic tools for robot control. Tutorial and training documents are listed here. You can also consider the interactive Jupyter notebook set of tutorials developed by Nicolas Mansard and Yann de Mont-Marin.
Pinocchio continuous integrations
Pinocchio is constantly tested for several platforms and distributions, as reported below:
| CI on ROS | |
| CI on Linux via APT | |
| CI on OSX via Conda | |
| CI on Windows via Conda | |
| CI on Linux via Robotpkg | |
Performances
Pinocchio exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, Pinocchio can unroll most of the computations directly at compile time, allowing to achieve impressive performances for a large range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical paper. In addition, the introspection may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
Ongoing developments
If you want to follow the current developments, you can directly refer to the devel branch. The master branch only contains the latest release. Any new Pull Request should then be submitted on the devel branch.
Installation
Pinocchio can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the installation procedure.
Conda
You simply need this simple line:
conda install pinocchio -c conda-forge
ROS
Pinocchio is also deployed on ROS. You may follow its deployment status below.
If you’re interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA. Here, you can install Pinocchio using:
sudo apt install ros-$ROS_DISTRO-pinocchio
This installs Pinocchio with HPP-FCL support and with Python bindings. You can then use Pinocchio in your ROS packages by:
- Depending on Pinocchio in your
package.xmlconfig (<depend>pinocchio</depend>) - Including Pinocchio via CMake (
find_package(pinocchio REQUIRED)) and linking against Pinocchio (target_link_libraries(my_library pinocchio::pinocchio))
We include support and hooks to discover the package for both ROS 1 and ROS 2. Examples can be found at the following repositories:
Please note that we always advise including the pinocchio/fwd.hpp header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 1 | ROS 2 | |||
|---|---|---|---|---|
| Melodic | Foxy | |||
| Noetic | Galactic | |||
| Humble | ||||
| Rolling |
Visualization
Pinocchio provides support for many open-source and free visualizers:
- Gepetto Viewer: a C++ viewer based on OpenSceneGraph with Python bindings and Blender export. See here for a C++ example on mixing Pinocchio and Gepetto Viewer.
- Meshcat: supporting visualization in Python and which can be embedded inside any browser.
- Panda3d: supporting visualization in Python and which can be embedded inside any browser.
- RViz: supporting visualization in Python and which can interact with other ROS packages.
Many external viewers can also be integrated. For more information, see the example here.
Citing Pinocchio
To cite Pinocchio in your academic research, please consider citing the software paper and use the following BibTeX entry:
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
And the following one for the link to the GitHub codebase:
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
Citing specific algorithmic contributions
Pinocchio goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning and control. Pinocchio provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc. If you use these algorithms, please consider citing them in your research articles.
- Le Lidec, Q., Montaut, L. & Carpentier, J. (2024, July). From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach. In RSS 2024-Robotics: Science and Systems.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). GJK++: Leveraging Acceleration Methods for Faster Collision Detection. IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). Constrained Articulated Body Dynamics Algorithms. Under review.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). Differentiable collision detection: a randomized smoothing approach. In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2023). Contact models in robotics: a comparative analysis. Under review.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). Collision Detection Accelerated: An Optimization Perspective. In Robotics: Science and Systems (RSS 2O22).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). Proximal and sparse resolution of constrained dynamic equations. In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). Analytical derivatives of rigid body dynamics algorithms. In Robotics: Science and systems (RSS 2018).
Questions and Issues
Do you have a question or an issue? You may either directly open a new question or a new issue or, directly contact us via the mailing list pinocchio@inria.fr.
Credits
The following people have been involved in the development of Pinocchio and are warmly thanked for their contributions:
- Justin Carpentier (Inria): main developer and manager of the project
- Nicolas Mansard (LAAS-CNRS): initial project instructor
- Guilhem Saurel (LAAS-CNRS): continuous integration and deployment
- Joseph Mirabel (Eureka Robotics): Lie groups and hpp-fcl implementation
- Antonio El Khoury (Wandercraft): bug fixes
- Gabriele Buondono (LAAS-CNRS): features extension, bug fixes, and Python bindings
- Florian Valenza (Astek): core developments and hpp-fcl support
- Wolfgang Merkt (University of Oxford): ROS integration and support
- Rohan Budhiraja (LAAS-CNRS): features extension
- Loïc Estève (Inria): Conda integration and support
- Igor Kalevatykh (Inria): Panda3d viewer support
- Matthieu Vigne (Wandercraft): MeshCat viewer support
- Robin Strudel (Inria): features extension
- François Keith (CEA): Windows support
- Sarah El Kazdadi (Inria): multi-precision arithmetic support
- Nicolas Torres Alberto (Inria): features extension
- Etienne Arlaud (Inria): RViz viewer support
- Wilson Jallet (LAAS-CNRS/Inria): extension of Python bindings
- Fabian Schramm (Inria): core developper
- Shubham Singh (UT Austin): second-order inverse dynamics derivatives
- Stéphane Caron (Inria): core developper
- Joris Vaillant (Inria): core developer and manager of the project
- Sebastian Castro (The AI Institute): MeshCat viewer feature extension
- Lev Kozlov: Kinetic and potential energy regressors
- Megane Millan (Inria): Features extension and core developer
- Simeon Nedelchev: Pseudo inertia and Log-Cholesky parametrization
- Ajay Sathya (Inria): core developer
If you have participated in the development of Pinocchio, please add your name and contribution to this list.
Open-source projects relying on Pinocchio
- Crocoddyl: A software to realize model predictive control for complex robotics platforms.
- TSID: A software that implements a Task Space Inverse Dynamics QP.
- HPP: A SDK that implements motion planners for humanoids and other robots.
- Jiminy: A simulator based on Pinocchio.
- ocs2: A toolbox for Optimal Control for Switched Systems (OCS2)
- TriFingerSimulation: TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- Casadi_Kin_Dyn: IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- PyRoboPlan: An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- ProxSuite-NLP: A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- Aligator: A versatile and efficient framework for constrained trajectory optimization.
- Simple: The Simple Simulator: Simulation Made Simple.
- LoIK: Low-Complexity Inverse Kinematics.
Acknowledgments
The development of Pinocchio is actively supported by the Gepetto team @LAAS-CNRS and the Willow team @INRIA.
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
Unreleased
Added
- Add parsing meshes with vertices for MJCF format (#2537)
Fixed
- Fix mjcf Euler angle parsing: use xyz as a default value for eulerseq compiler option (#2526)
- Fix variable naming in Python (#2530)
- Fix aba explicit template instantiation (#2541)
- CMake: fix RPATH on macos (#2546)
- Fix aba explicit template instantiation (#2541)
- Fix mjcf parsing of keyframe qpos with newlines (#2535)
- Fix sites parsing for MJCF format (#2548)
3.3.1 - 2024-12-13
Added
- Add
pinocchio_python_parsertarget (#2475)
Fixed
- Fix mjcf parsing of armature and of the default tag in models (#2477)
- Fix undefined behavior when using the site attribute in mjcf (#2477)
- Fix the type of image paths when loading textures in the meshcat visualizer (#2478)
- Fix meshcat examples ([#2503])[https://github.com/stack-of-tasks/pinocchio/pull/2503]
- Fix
pinocchio-test-cpp-parallel-geometrywhen built with Coal (#2502) - Fix scaling support for meshcat (#2511)
Changed
- On GNU/Linux and macOS, hide all symbols by default (#2469)
- Build
pinocchio_defaultwith collision features (#2517)
3.3.0 - 2024-11-06
Added
- Default visualizer can be changed with
PINOCCHIO_VIEWERenvironment variable (#2419) - Add more Python and C++ examples related to inverse kinematics with 3d tasks (#2428)
- Add parsing of equality/connect tag for closed-loop chains for MJCF format (#2413)
- Add compatibility with NumPy 2
__array__API (#2436) - Added argument to let users decide of root joint name when parsing models (urdf, mjcf, sdf) (#2402)
- Allow use of
pathlib.Path | strfor paths in python bindings (#2431) - Add Pseudo inertia and Log-cholesky parametrization (#2296)
- Add Pixi support (#2459)
Fixed
- Fix linkage of Boost.Serialization on Windows (#2400)
- Fix mjcf parser appending of inertias at root joint (#2403)
- Fix unit tests with GCC 13.3 (#2406
- Fix class abstract error for Rviz viewer (#2425)
- Fix compilation issue with MSCV and C++17 (#2437)
- Fix
pinocchio-test-py-robot_wrapperwhen building with SDF and collision support (#2437) - Fix crash when calling
Inertia::FromDynamicParametersin Python with wrong vector size (#2296) - Fix
examples/cassie-simulation.pyandexamples/talos-simulation.py(#2443) - Fix build with CppAd 2024 (#2459)
- Fix
pinocchio-test-cpp-mjcfunittest with Boost 1.86 (#2459) - Fix
pinocchio-test-cpp-constraint-variantsuninitialized values (#2459) - Fix mixing library symbols between Pinocchio scalar bindings (#2459)
- Fix bug for get{Joint,Frame}JacobianTimeVariation (#2466)
Changed
- Modernize python code base with ruff (#2418)
- Does not create a root_joint frame from parsed models (urdf, mjcf and sdf) when no root joint is provided (#2402)
3.2.0 - 2024-08-27
Fixed
- Append pinocchio optional libraries into pkg-config file (#2322)
- Fixed support of DAE meshes with MeshCat (#2331)
- Fixed pointer casts in urdf parser (#2339)
- Remove CMake CMP0167 warnings (#2347)
- Fixed urdfdom in ROS packaging (#2341)
- Fixed overview-urdf cpp example (#2384)
- Fixed mjcf model without a base link parsing (#2386)
- Fixed talos-simulation.py, simulation-contact-dynamics.py and simulation-closed-kinematic-chains.py examples (#2392)
Added
- Add getMotionAxis method to helical, prismatic, revolute and ubounded revolute joint (#2315)
- Add initial compatiblity with coal (coal needs
-DCOAL_BACKWARD_COMPATIBILITY_WITH_HPP_FCL=ON) (#2323) - Add compatibility with jrl-cmakemodules workspace (#2333)
- Add
collision_colorparameter toMeshcatVisualizer.loadViewerModel(#2350) - Add
BuildFromMJCFfunction to RobotWrapper (#2363) - Add more CasADi examples (#2388)
Removed
- Remove deprecated headers related to joint constraints (#2382)
Changed
- Use eigenpy to expose
GeometryObject::meshMaterialvariant (#2315) - GepettoViewer is no more the default viewer for RobotWrapper (#2331)
- Modernize python code base with ruff (#2367)
- Restructure CppAD and CasADi examples (#2388)
- Enhance and fix CppAD benchmarks outputs (#2393)
3.1.0 - 2024-07-04
Fixed
- Fix
appendModelwhen joints after the base are in parallel (#2295) - Fix
appendModelbuild when called with template arguments different than the ones fromcontext(#2284) - Fix
TransformRevoleTpl::rotationandTransformHelicalTpl::rotationbuild (#2284) - Fix compilation issue for Boost 1.85 (#2255)
- Fix python bindings of
contactInverseDynamics(#2263) - Deactivate
BUILD_WITH_LIBPYTHONwhen building with PyPy (#2274) - Fix Python bindings cross building with
hpp-fcl(#2288) - Fix build issue on Windows when a deprecated header is included (#2292)
- Fix build issue on Windows when building in Debug mode (#2292)
- Fix visualization of meshes in meshcat (#2294)
- Fix Anymal simulation test (#2299)
- Fix contact derivatives and impulse dynamics tests (#2300)
- Fix CMake compatibility with old console_bridge version (#2312)
Added
- Python unittest for
contactInverseDynamicsfunction (#2263) - Added helper functions to return operation count of CasADi functions. (#2275)
- C++ and Python unittest for
dIntegrateTransportto check vector transport and its inverse (#2273) - Add kinetic and potential energy regressors (#2282)
Removed
- Remove header
list.hppinclude for bindings of model and rnea (#2263)
3.0.0 - 2024-05-27
Added
Automatic differentiation
- Full support of Casadi in the main library by @jcarpent and @ManifoldFR
- Full support of Casadi for Python bindings by @jcarpent
- Full support of Boost.Multiprecision in the main library by @jcarpent
- Full support of Boost.Multiprecision for Python bindings by @jcarpent
- Full support of CppAD and CppADCodeGen in the main library by @jcarpent
- Full support of CppAD and CppADCodeGen for Python bindings by @jcarpent and @proyan
Core features
- Full support of constrained dynamical systems by @jcarpent
- Full support of derivatives of constrained dynamical systems by @jcarpent and @proyan
- Extended algorithms for constrained dynamics: constrained ABA, PV solvers, etc. by @jcarpent and @AjSat
- Add frictional contact solvers (PGS, ADMM) by @jcarpent
- Add contact inverse dynamics by @quentinll
- Full support of broadphase algorithms in Pinocchio by @jcarpent
- New joint supports (Helicoidal, Universal) by @fabinsch and @MegMll
- Add new algorithms for supporting Delassus factorizations for sparse, dense and tree-based systems by @jcarpent
- Add full OpenMP support for many algorithms (ABA, RNEA, collision detection, etc.) by @jcarpent
- Full support of GeometryModel, GeometryObject serialization by @jcarpent
- Extended support of Meshcat by @jcarpent, @ManifoldFR and @jorisv
- Extended testing and support of Lie groups operations by @jcarpent and @ManifoldFR
- Full support of AVX512 and AVX2 vectorization for Python bindings by @jcarpent
- Full support of the robot armature in RNEA, CRBA and ABA
- Extended formulation of CRBA and ABA using WORLD convention for reduced computational burden in the derivative algorithms
Parsers
Extra Algorithms
- Added reachable workspace computation and vizualisation in collaboration with @askuric based on pycapacity by @MegMll and @jorisv
Packaging
- Full support of template instantiation by @fabinsch and @jorisv
- Enhance support for Windows-based systems by @jorisv
- Splitting of the Pinocchio into sub-library for isolation by @jorisv
Compatibility
- Add
PINOCCHIO_ENABLE_COMPATIBILITY_WITH_VERSION_2define to activate compatibility with Pinocchio 2 API
Changed
C++
- Change minimum required version of C++ to C++11. Check for compatibility here: https://en.cppreference.com/w/cpp/compiler_support/11
- Replace
pinocchio::BiasZeroTplbypinocchio::MotionZeroTpl - Replace
pinocchio::fusion::JointVisitorBasebypinocchio::fusion::JointUnaryVisitorBase - Replace
pinocchio::fusion::push_frontbypinocchio::fusion::append - Replace
pinocchio::regressor::computeStaticRegressorbypinocchio::computeStaticRegressor - Replace
pinocchio::jointJacobianbypinocchio::computeJointJacobian - Replace
pinocchio::frameJacobianbypinocchio::computeFrameJacobian - Replace
pinocchio::framesForwardKinematicsbypinocchio::updateFramePlacements - Replace
pinocchio::kineticEnergybypinocchio::computeKineticEnergy - Replace
pinocchio::potentialEnergybypinocchio::computePotentialEnergy - Replace
pinocchio::computeCentroidalDynamicsbypinocchio::computeCentroidalMomentumandpinocchio::computeCentroidalMomentumTimeVariation - Replace
pinocchio::centerOfMass(const ModelTpl&, DataTpl&, int, bool)bypinocchio::centerOfMass(const ModelTpl&, DataTpl&, KinematicLevel, bool) - Replace
pinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, int)bypinocchio::copy(const ModelTpl&, const DataTpl&, DataTpl&, KinematicLevel) - Replace
pinocchio/algorithm/dynamics.hppbypinocchio/algorithm/constrained-dynamics.hpp - Change the order of arguments in some of
pinocchio::GeometryObject’s constructors - Deprecate
pinocchio/algorithm/parallel/geometry.hppmoved atpinocchio/collision/parallel/geometry.hpp - Deprecate
pinocchio/spatial/fcl-pinocchio-conversions.hppmoved atpinocchio/collision/fcl-pinocchio-conversions.hpp - Deprecate
pinocchio/parsers/sample-models.hppmoved atpinocchio/multibody/sample-models.hpp - Deprecate
pinocchio/math/cppad.hppmoved atpinocchio/autodiff/cppad.hpp - Deprecate
pinocchio/math/cppadcg.hppmoved atpinocchio/autodiff/cppadcg.hpp - Deprecate
pinocchio/math/casadi.hppmoved atpinocchio/autodiff/casadi.hpp - Deprecate
pinocchio::FrameTpl::parentreplaced bypinocchio::FrameTpl::parentJoint - Deprecate
pinocchio::FrameTpl::previousFramereplaced bypinocchio::FrameTpl::parentFrame - Deprecate
pinocchio/algorithm/contact-dynamics.hppalgorithms replaced bypinocchio/algorithm/constrained-dynamics.hpp
Python
- Replace
pinocchio.utils.skewbypinocchio.skew - Replace
pinocchio.utils.se3ToXYZQUATbypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.utils.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.robot_wrapper.RobotWrapper.frameClassicAccelerationbypinocchio.robot_wrapper.RobotWrapper.frameClassicalAcceleration - Replace
pinocchio.robot_wrapper.RobotWrapper.jointJacobianbypinocchio.robot_wrapper.RobotWrapper.computeJointJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.frameJacobianbypinocchio.robot_wrapper.RobotWrapper.computeFrameJacobian - Replace
pinocchio.robot_wrapper.RobotWrapper.initDisplaybypinocchio.robot_wrapper.RobotWrapper.initViewer - Replace
pinocchio.robot_wrapper.RobotWrapper.loadDisplayModelbypinocchio.robot_wrapper.RobotWrapper.loadViewerModel - Replace
pinocchio.deprecated.se3ToXYZQUATtuplebypinocchio.SE3ToXYZQUATtuple - Replace
pinocchio.deprecated.se3ToXYZQUATbypinocchio.SE3ToXYZQUAT - Replace
pinocchio.deprecated.XYZQUATToSe3bypinocchio.XYZQUATToSE3 - Replace
pinocchio.deprecated.buildGeomFromUrdf(model, filename, [str])bypinocchio.buildGeomFromUrdf(model, filename, type, package_dirs, mesh_loader) - Replace
pinocchio.rpy.npToTTuplebypinocchio.utils.npToTTuple - Replace
pinocchio.rpy.npToTuplebypinocchio.utils.npToTuple - Replace
pinocchio.jacobianSubtreeCoMJacobianbypinocchio.jacobianSubtreeCenterOfMass
Removed
C++
- Remove
pinocchio::setGeometryMeshScales - Remove some
pinocchio::forwardDynamicssignatures - Remove some
pinocchio::impulseDynamicssignatures
Python
- Remove
pinocchio.utils.cross - Remove
pinocchio.robot_wrapper.RobotWrapper.initMeshcatDisplay - Remove
pinocchio.deprecated.setGeometryMeshScalesbypinocchio
2.7.1 - 2024-04-26
Changed
- Modify algorithm that appends a model to another (#2218)
- Set NOMINMAX as a public definitions on Windows (#2139)
- Improve documentation of
enum ReferenceFrame(#2190) - Improve documentation of
getJointJacobian(#2193).
Fixed
- CMake now uses Relative Path instead of Absolute (#2202)
- Order of frames in
ReducedModelis now the same as in the full model (#2160) - Remove a lot of warnings (#2139)
-
MeshcatVisualizerdoesn’t crash anymore when there is no collision model defined (#2147) - Fix MSVC build (#2155)
- Fix stub generation (#2166)
- Clean up empty documentation pages and sections (#2167)
- Fix SO(3) title and cross-section reference in the documentation (#2210)
Added
- Add
examples/floating-base-velocity-viewer.pyto visualize floating base velocity (#2143) - Add remark to the documentation of
getFrame(Classical)Accelerationfunctions (#2169) - Allow use of installed jrl-cmakemodules (#2216)
2.7.0 - 2024-01-23
Added
- Add
GeometryObject::meshMaterialattribute (#2084) - Add Parser for mujoco mjcf models
pinocchio::mjcf::buildModelandpinocchio::mjcf::buildGeom
Fixed
- Use bp::ssize_t for recent version of Windows compilers (#2102)
- Fix missing include for Boost >= 1.83 (#2103)
- Remove f-strings to fix install with python 2 (#2110)
- CMake: stop exporting CppAd/cppadcodegen & fetch submodule if not available (#2112)
- Fix malloc issue in CRBA algo (#2126)
- Fix build cppad and cppadcg with Boost < 1.77 (#2132)
2.6.21 - 2023-11-27
Added
- Add inverse dynamics (
rnea) Python and C++ example (#2083) - Add visualization of Frames in MeshCat viewer (#2098)
Fixed
- Re-initialize
Ycrb[0]incrbaMinimal(#2040) - Fix custom scalar use in
logfunction (#2047) - Raise exception on wrong input size in
XYZQUATToSE3Python binding function (#2073) - Remove memory leak in
buildGeomFromUrdfandbuildGeomFromUrdfStringPython binding functions (#2082https://github.com/stack-of-tasks/pinocchio/pull/2082) - Fix Panda3D viewer examples (#2087)
- Fix centroidal dynamics derivatives with respect to time (#2094))
Changed
- Rename freeflyer_joint to root_joint in
humanoidsample model (#2043) - CMake minimal version is now 3.10 (#2055)
- Split headers and sources in different directories to have a more standard C++ project (#2070)
Removed
- Remove support to
hpp-fcl< v2.0.0 (#2086)
2.6.20 - 2023-08-09
What’s Changed
- Fix support of recent versions of Boost for CppAD and CppADCodeGen by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2000
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 1e0c5aff1147d50d58bf4185a55ff564c9b6e027 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2007
- Enabled copy and deepcopy by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1882
- build(deps): bump ros-industrial/industrial_ci from afbf77f39db26785371161d5691ab435b31bb3ba to 9f963f67ebb889792175776c5ee00134d7bb569b by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/2013
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/2029
2.6.19 - 2023-06-19
What’s Changed
- Add Motion::toHomogeneousMatrix by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1946
- The insatiable English teacher PR 🧙 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1957
- require C++14 for Boost >= 1.81 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1949
- CMake: an example require python 3 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1966
- Fix IK example in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1963
- Issue templates by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1971
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1976
- Enhance CMake packaging for Windows by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1984
- Documentation by @drewhamiltonasdf in https://github.com/stack-of-tasks/pinocchio/pull/1986
- Add support for ccache on Conda build by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1987
- build(deps): bump ros-industrial/industrial_ci from 4b78602d67127a63dce62926769d9ec4e2ce72e4 to afbf77f39db26785371161d5691ab435b31bb3ba by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1988
- Enhance compatibility with new Python versions by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1996
New Contributors
- @drewhamiltonasdf made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1986
2.6.18 - 2023-04-29
What’s Changed
- Support force in pybind11 by @cmastalli in https://github.com/stack-of-tasks/pinocchio/pull/1868
- Fix some Python bindings signatures and add stub generation. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1869
- Fix IK example by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1875
- Remove empty examples by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1878
- build(deps): bump ros-industrial/industrial_ci from 6a8f546cbd31fbd5c9f77e3409265c8b39abc3d6 to 4b78602d67127a63dce62926769d9ec4e2ce72e4 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1890
- add static-contact-dynamics example by @PepMS in https://github.com/stack-of-tasks/pinocchio/pull/1891
- Update documentation of
JointModel.shortnamein python bindings by @Danfoa in https://github.com/stack-of-tasks/pinocchio/pull/1892 - update doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1898
- Document that joints need to be added in depth-first order by @traversaro in https://github.com/stack-of-tasks/pinocchio/pull/1899
- fix INSTALL_RPATH on ROS & OSX by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1908
- Python example: update joint placements after loading a URDF by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1911
- Remove more empty sections from the docs by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1912
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1914
- update doc for fixed joint by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1920
- doc: more information about frames on cheatsheet by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1930
- Define operational frames in the documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1929
- Remove support of np.matrix by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1941
- Fix other np.matrix issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1942
New Contributors
- @PepMS made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1891
- @Danfoa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1892
2.6.17 - 2023-02-15
What’s Changed
- Fix Jlog6 documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1857
- Add documentation to Jlog3 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1858
- [python/visualize] Extend visualizer features and implement them for MeshcatVisualizer by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1845
- Second-order RNEA derivatives by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1860
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1863
- Fix support of AVX2. by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1865
2.6.16 - 2023-02-02
What’s Changed
- Enforce testing of Python bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1853
- Fix issue with Python 3.6 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1855
2.6.15 - 2023-01-31
What’s Changed
- More documentation for getJointJacobian by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1836
- Error when integrating SE3 with the same vector given as input and output by @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1775
- Documentation for Jlog6 by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1842
- remove useless header by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1846
- Fix issue with recent change on master branch for ROS-CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1847
- Fix issue with old version of Boost and eigenpy >= 2.9.0 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1851
2.6.14 - 2023-01-13
What’s Changed
- Fix registration of ptr to Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1832
2.6.13 - 2023-01-12
What’s Changed
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1790
- Skip collision pairs between geom on same joint in appendGeometryModel by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1791
- Fix issue with Boost 1.78 on OSX systems by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1792
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1793
- Add helper functions for computing supported inertia and force by frames by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1796
- Follow-up : Supported inertia by frame by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1797
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1799
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1801
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1802
- build(deps): bump goanpeca/setup-miniconda from 1 to 2 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1809
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1811
- Fix Python issues by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1821
- Allow to use std::shared_ptr by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1822
2.6.12 - 2022-11-06
What’s Changed
- Elevate check for ambiguous input argument to an exception by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1781
- Fix packaging issues + sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1782
- Fix issue with clang by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1784
2.6.11 - 2022-10-25
What’s Changed
- URDF: fix loading relative mesh path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1748
- Sync submodule cmake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1750
- Add @note to difference documentation by @stephane-caron in https://github.com/stack-of-tasks/pinocchio/pull/1753
- Configuration limits for joints and model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1756
- Address remaining warnings + speed-up build for BUILD_TESTING=OFF by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1764
- Add status of ROS builds to README by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1770
- pinocchio/visualize: Add support for cone shape in meshcat dispaly by @whtqh in https://github.com/stack-of-tasks/pinocchio/pull/1769
- Updates README by @nikoandpiko in https://github.com/stack-of-tasks/pinocchio/pull/1776
- Enhance cmake packaging by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1777
New Contributors
- @stephane-caron made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1753
- @whtqh made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1769
- @nikoandpiko made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1776
2.6.10 - 2022-09-14
What’s Changed
- fix syntax for python 2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1734
- Expose
removeGeometryObjectin python binding by @Jiayuan-Gu in https://github.com/stack-of-tasks/pinocchio/pull/1736 - Fix relocalable by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1738
- Fix relative path in urdf by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1742
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1744
New Contributors
- @Jiayuan-Gu made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1736
2.6.9 - 2022-08-12
What’s Changed
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1669
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1670
- Sync example-robot-data by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1671
- update to pybind11 v2.9.2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1674
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1678
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1677
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1679
- build(deps): bump actions/checkout from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1692
- build(deps): bump actions/cache from 2 to 3 by @dependabot in https://github.com/stack-of-tasks/pinocchio/pull/1691
- Fix bug in appendModel by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1693
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1695
- Fix geometry color default value by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1699
- Add python example appending Urdf and another model by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1698
- SO3 diff impl use quaternion instead of rotation matrix by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1702
- add cheat sheet to doc by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1705
- cmake/utils: no need for python here by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1709
- Add header only target by @fabinsch in https://github.com/stack-of-tasks/pinocchio/pull/1712
- cmake: relocatable package for recent CMake versions by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1716
- cmake: modernize header-only lib by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1718
- ROS2/Colcon integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1719
- CMake: update to eigenpy 2.7.10 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1720
- Fix weird test failure on Conda by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1723
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1727
- ROS2 release support by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1681
- Sync submodule CMake by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1732
New Contributors
- @fabinsch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1698
2.6.8 - 2022-06-06
What’s Changed
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1648
- Fix integrate method for SO2 by @Toefinder in https://github.com/stack-of-tasks/pinocchio/pull/1652
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1653
- [pre-commit.ci] pre-commit autoupdate by @pre-commit-ci in https://github.com/stack-of-tasks/pinocchio/pull/1658
- Extend current Coriolis computations to account for Cristoffel symbol of first kind by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1665
- Fix method play() of rviz_visualizer by @danielcostanzi18 in https://github.com/stack-of-tasks/pinocchio/pull/1667
- chore: Included githubactions in the dependabot config by @nathannaveen in https://github.com/stack-of-tasks/pinocchio/pull/1659
- Enable ubuntu 22.04 on CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1668
New Contributors
- @pre-commit-ci made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1648
- @Toefinder made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1652
- @danielcostanzi18 made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1667
- @nathannaveen made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1659
2.6.7 - 2022-05-03
What’s Changed
- add dummy .pre-commit-config.yaml by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1629
- Avoid triggering multi-line comment in Latex formula by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1630
- Make Pinocchio v2 compatible with HPP-FCL v2 by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1631
- Add example of collision with a point cloud by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1636
- follow up on hpp-fcl v2 by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1637
- Fix pickling for Boost >= 1.7.4 by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1640
2.6.6 - 2022-03-22
What’s Changed
- Support HPP-FCL for ROS binaries & introduce ROS2 ament integration by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1622
2.6.5 - 2022-02-14
What’s Changed
- Fix warning issue in Python by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1546
- RVizVisualizer update by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1549
- Correct link to examples. Removed python subdirectory in the link as the directory does not exist anymore by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1561
- Add CONTRIBUTING.md file for newcomers by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1563
- Add list of projects based on Pinocchio by @olivier-stasse in https://github.com/stack-of-tasks/pinocchio/pull/1566
- Fix constrained dynamics formula by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1567
- Append “/share” to AMENT_PREFIX_PATH by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1568
- Expose dIntegrateTransport by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1572
- [timings] Reduce allocations in finite-difference baselines by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1583
- [computeAllTerms] Add missing noalias to avoid temporary allocation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1582
- Missing
noaliasby @duburcqa in https://github.com/stack-of-tasks/pinocchio/pull/1585 - [multibody/model] add joint arg validation by @proyan in https://github.com/stack-of-tasks/pinocchio/pull/1586
- [multibody/geometry] Add method to remove an object. by @florent-lamiraux in https://github.com/stack-of-tasks/pinocchio/pull/1588
- Fix bug in ABAChecker by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1599
- Update README.md by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1604
- allow
robot_wrapperto share data with itsvizby @vnghia in https://github.com/stack-of-tasks/pinocchio/pull/1606
New Contributors
- @duburcqa made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1585
- @vnghia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1606
2.6.4 - 2021-11-02
What’s Changed
- Change ‘typedef’ to ‘using’, add curly braces by @the-raspberry-pi-guy in https://github.com/stack-of-tasks/pinocchio/pull/1476
- [CMake] set INSTALL_RPATH for python on linux by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1482
- [visualize] captureImage() method by @ManifoldFR in https://github.com/stack-of-tasks/pinocchio/pull/1480
- ci: update ROS CI by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1483
- Fix issue with Pool when FCL is missing by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1485
- fix module name by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1487
- Add RVizVisualizer by @EtienneAr in https://github.com/stack-of-tasks/pinocchio/pull/1488
- fix reshape issues by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1489
- Remove useless reference to L-GPL + remove of useless files by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1500
- Update old function, remove mobile robot wrapper by @kozakromch in https://github.com/stack-of-tasks/pinocchio/pull/1490
- Allows the display of {COLLISION,VISUAL} in MeshCat by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1502
- Delete submodule travis by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1509
- Add citation by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1511
- badges: add PyPI by @nim65s in https://github.com/stack-of-tasks/pinocchio/pull/1510
- Add support of Convex within MeshCat + improve GeometryObject bindings by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1530
- [python] Fix BaseVisualizer constructor. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1533
- [python] Add pybind11 header. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1519
- make copy of supports during model cast by @rubengrandia in https://github.com/stack-of-tasks/pinocchio/pull/1536
- [python] Simplify buildGeomFromUrdf and allow to build from string. by @jmirabel in https://github.com/stack-of-tasks/pinocchio/pull/1538
- Sync submodule by @jcarpent in https://github.com/stack-of-tasks/pinocchio/pull/1542
- Turn off automatic documentation generation by @wxmerkt in https://github.com/stack-of-tasks/pinocchio/pull/1541
New Contributors
- @the-raspberry-pi-guy made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1476
- @ManifoldFR made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1480
- @EtienneAr made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1488
- @kozakromch made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1489
- @rubengrandia made their first contribution in https://github.com/stack-of-tasks/pinocchio/pull/1536
2.6.3 - 2021-07-27
This new release fixes bugs in MeshCat rendering, loading of ROS path and in the Centroidal dynamics derivatives
2.6.2 - 2021-07-05
This new release provides fixes include orders in the unit tests due to recent versions of Boost. It also provides more content to the Readme. This new release prefigures the new Pinocchio 3.x
2.6.1 - 2021-06-08
Enhancement:
- extended support of serialization of FCL primitives
- extended support of Boost.Variant in Python
Fixes:
- fix bug when loading URDF on Windows
- fix handling of Frame inertia
2.6.0 - 2021-04-11
This new release provides:
- improvement for handling collision/distance requests
- support of parallel computations for ABA, RNEA and collisions algorithms (more to come soon)
- additional features for the RobotWrapper in Python
- support of Capsule for Meshcat
- happened Inertia information to Frames
- fixes for doc issues
- improve numerical robustness when two inertias are Zero
2.5.6 - 2021-01-23
This new release comes with a more consistent ABA algorithm (data.a_gf used instead of classic data.a) and more outcomes for computeAllTerms. In addition, it provides some extended supports to PyPy.
2.5.5 - 2021-01-07
This maintenance release enhances the whole CMake packaging of the project and provides additional features for the Python bindings.
2.5.4 - 2020-11-26
This new release enhances the compatibility of Pinocchio with former distributions, provides better support to Euler angles and fixes some bugs.
2.5.3 - 2020-11-13
This new release fixes some issues with the Python bindings, add new examples and extend the whole tests.
2.5.2 - 2020-11-02
This new release enhances the compatibility with Windows, provides new tools eitheir to work on joint configurations and also to compute the kinematic regressors.
2.5.1 - 2020-10-12
This new release provides:
- improvements on the whole project coverage
- better support of Windows v142
- support of joint friction and damping (only at the interface level)
- new algorithm to retrieve the Coriolis matrix from RNEA/ABA derivatives
2.5.0 - 2020-08-31
In this new release, we have:
- a full memory shared in the Python bindings, i.e. that all the Eigen object can now be changed in Python.
- better handling of multiprecision arithmetic
- improved CMake packaging
- fix for Autodiff
2.4.7 - 2020-07-20
This new release provides:
- an extended API for dealing with Lie groups and the related computations (integration, difference, derivatives, etc.)
- the Lie groups have now their Python bindings for easy code prototyping
- the kinematics derivatives of the Frames have been introduced as well as the extension of current Joints derivatives
- the packaging of the project has been improved too.
2.4.6 - 2020-06-15
This new release of Pinocchio removes the use of pkg-config to check dependencies and provides a full compatibility and support for Windows systems.
2.4.5 - 2020-05-23
This new release extends the current frames algorithms to also consider the LOCAL_WORLD_ALIGNED reference frame. It also exposes the values of the enum_ for simplified usage.
2.4.4 - 2020-05-13
This new release provides:
- new helpers function to retrieve frame velocities and accelerations
- for each collision pair, it is now possible to provide specific collision checking settings
- support to display convex hulls in viewers
It also fixes:
- the support of Panda3d
and enhances the global CMake packaging of the project.
2.4.3 - 2020-04-24
This new release provides a new Viewer, named Panda3d, for easy code visualization in Python. It also provides additional fixes to the Code Generation support.
2.4.2 - 2020-04-21
This new release of Pinocchio provides new features for dealing with Lie groups:
- improved operations over the differential operations of the integrate function
- new functions for transporting some matrix between the two endpoints of the integrate function
- the RPY functions are now robust over singularities
- the support of autodiff frameworks has been improved to also cope with Lie groups features
This release also provides:
- a packaging fixe with respect to the URDFDOM dependency
- the Python bindings should now be without memory leak
2.4.1 - 2020-04-15
This new release fixes a bug introduced in Pinocchio 2.4.0 concerning the method ModelTpl::addFrame. This release also provides better support for the checking of the CppAD and CppADCodeGen versions.
2.4.0 - 2020-04-09
This new release of Pinocchio makes several improvements:
- improve compatibility with hpp-fcl
- improve compatibility with CppAD and notably the Lie algebra features
- a better CMake >= 3.0 export of the project
- new examples for Code generation
- improved Python bindings
- improved support for Boost.Multiprecision
- reduce the memory usage when compilation unit tests
and we have started to move some dependencies like urdfdom to the pinocchio.so library to avoid additional compilations issues and to useless compilations burden.
2.3.1 - 2020-02-20
This new release provides:
- some fixes with respect to minor bugs introduced in Pinocchio 2.3.0
- an enhance detection of Python
- improves the compilation memory overhead
2.3.0 - 2020-02-18
This new release provides:
- full compatibility with CMake export
- full compatibility with Numpy.Array
- examples for Code generation
- better support of C++11
- minor bug fixes
- improves coverage
- uniformizes function signature
- improves interoperability between Numpy and Pinocchio
- add many examples
- full integration of Python bindings of hpp-fcl
- supports the pickling and the serialization of Data
2.2.3 - 2019-12-30
This new release provides:
- pickling and serialization of Data structures
- provide new algorithms to create reduce models
It also improves the compatibility with the Transform used in HPP-FCL. It also fixes various bugs. It also comes with new and detailed examples.
2.2.2 - 2019-12-11
This new release:
- improves the compatibility with HPP-FCL bindings
- improves the documentation of the project with more examples
- fixes some bugs related to Eigen
- add new algorithms to compute the centroidal matrix and its time derivatives
2.2.1 - 2019-11-25
This new release fixes the ROS package version number and updates the robot models.
2.2.0 - 2019-11-25
This new release of Pinocchio introduces:
- analytical formula for Hessian of the kinematics
- derivatives of the difference operation
- new derivatives for static torque quantity
- new models for tests and examples.
It adds some signature non-exposed in Python. It also deletes outdated function signatures that have been deprecated in 2.0.x versions. It also improves the packaging with respect to ROS or other robotics frameworks.
2.1.11 - 2019-10-27
This release fixes missing update of the ROS package.xml file with the new version.
2.1.10 - 2019-10-25
This new release allows throwing when some input arguments are not fulfilled (useful feature in Python). It also provides new support for Hessian of the kinematics. Finally, the project is now packaged for ROS integration.
2.1.9 - 2019-10-09
This is a maintenance release, with some fixes concerning the contact dynamics, better support of LOCAL_WORLD_ALIGNED option and fixes with respect to some recent versions of CppADCodeGen.
2.1.8 - 2019-09-30
This is a maintenance release providing several fixes:
- remove memory allocation in ABA derivatives with contact forces
- better handling of boost::Variant
- better support of Majax
It also provides new features in the documentation of mathematical formula.
2.1.7 - 2019-09-10
This new release improves:
- the support of AutoDiff frameworks
- the efficiency of some core algorithms
fixes:
- the support of Majax
- the compatibility with Python 2/3
2.1.6 - 2019-08-05
This new release improves the packaging of the project and provides new algorithms to compute the Jacobians of the center of mass of each subtree.
2.1.5 - 2019-07-16
This new release provides support for JointMimic and JointRevoluteUnboundedUnaligned. It also comes with the full support of CasADi.
Thanks to @mkatliar for helping us to provide this support.
2.1.4 - 2019-06-22
This new release provides some fixes with respect to Python bindings, C++17 as well as new important features:
- dynamic regressor for identification
- add support of multiple viewers
- improve analytical derivatives
2.1.3 - 2019-04-30
This new release fixes some issues with Python 3 and C++17 standard. It also provides additional documentation, enlarges the current Python bindings and uniformizes naming convention in Python.
2.1.2 - 2019-04-05
This new release aims at fixing compilations issues when COLLISION module is activated. It also provides some fixes concerning the loading of meshes.
A new feature provided by this release concerns the possibility of appending two models together.
2.1.1 - 2019-03-27
This new release fixes compatibility bugs with previous release 2.1.0. It also provides a serialization interface for Spatial classes and the Model class.
2.1.0 - 2019-02-27
This new release makes some major improvements:
- it is now possible to use MeshCat, another viewer working in the browser directly in Python
- the Python bindings are now hardly tested and uniformized with respect to the C++ API
- this new release is compatible with recent releases of
hpp-fcl - the SRDF parsing has been improved. Its now possible to load several reference configuration vectors
We also fixed bugs related to recent versions of Boost mostly.
2.0.0 - 2019-01-11
Welcome Pinocchio 2.0.0.
This release makes official the last important and new features for efficiently computing the dynamics of the rigid body systems:
- Analytical derivatives
- Automatic differentiation
- Full scalar type overloading
- Code generation among others
1.3.3 - 2018-10-29
This is for real the last release before Pinocchio 2.0.0 and more.
This release fixes the packaging when hpp-fcl is missing. Thanks to @aelkhour for raising this issue.
1.3.2 - 2018-10-26
This release is the last one before Pinocchio 2.0.0.
It mostly:
- fixes issues introduced by new API of frame functionalities;
- introduces new sample models for manipulator and humanoid systems;
- fixes bugs due to boost 1.58.0;
- improve the readme with credits section.
1.3.1 - 2018-09-25
This new release corrects some bugs or bad deprecations concerning Pinocchio 1.3.0.
1.3.0 - 2018-08-28
This new release introduces analytical derivatives in the corpus of Pinocchio. This feature is still under development but can already be used both in C++ and Python.
This new release also fixes a bunch of bugs related to Eigen and Boost.
1.2.9 - 2018-06-01
This is mostly a maintenance release:
- Fix bug in. lower bounds in Model class
- Update documentation structure (additional work is needed)
- Improve the compatibility with Python 3.x
1.2.8 - 2018-05-18
This is mostly a maintenance release:
- Fix some bugs in JointModel{Translation,Spherical} for ABA algorithm
- Fix a duplication issue in RobotWrapper
- Improve compatibility with recent version of Boost >= 1.67.0
- Romeo is now loaded from the official romeo_description repository
1.2.7 - 2018-04-03
This is mostly a maintenance release:
- Fixes and computation improvements for Lie group operations.
- Adding pickle for spatial classes.
- Allow loading of URDF tree directly from an XML stream.
1.2.6 - 2018-01-15
This is mostly a maintenance release with various fixes to comply with Boost variadic macro on recent OS. It also adds new convention with a LOCAL and a WORLD frame to express Jacobian quantities.
1.2.5 - 2017-10-10
This a maintenance Release. We added some algo to compute the time variation of the Jacobians together with the variation with respect to time of the centroidal momemtum matrix. HPP-FCL works now with Eigen for linear algebra.
1.2.4 - 2017-06-09
This is mostly a maintenance release, with some fix with respect new urdfdom versions, it handles Eigen support with hpp-fcl.
1.2.3 - 2017-02-14
This release fixes some issues with respect to 1.2.1.
API modifications
Interpolate, Differentiate, Integrate are now algorithmic struct which can be efficiently overloaded.
Bindings
Add FCL object bindings
1.2.1 - 2016-10-17
Summary
This release is a minor patch of the previous release 1.2.0.
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New
- The Python bindings are aligned and free of unnecessary allocations
- Add documentation option which allows to not install the documentation
- Introduces container::aligned_vector to automatically create an std::vector with specific aligned allocator
API modifications
- Remove JointDense.
- Remove JointGeneric
Fixes
- Solves the parsing of geometries in URDF module
- Fixes alignment issues on 32 bits architecture
1.2.0 - 2016-09-29
Summary
The main modifications concern the update of the code to comply with the Humanoid Path Planner (HPP).
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Add Joint{Model,Data} classes based on Joint{Model,Data}Base and Joint{Model,Data}Variant. Those classes call directly the visitors and make Variant accessible throw methods
- Add partial Joint{Model,Data}Composite. They allow a stack of joints without adding any Inertia.
- Increase Frame class. Frames can be of several types (BODY, JOINT, SENSOR, etc) and reflect the robot tree as it appears in the URDF conventions. Frames have two attributes: parent which the direct Joint parent in the Joint tree, previousFrame which correspond to the parent Frame in the tree of Frames).
- Adding Python parser which is able to read models written in Python.
- Add algo checker to check the validity of a model.
- Improve documentation.
API modifications
- Model has some methods deprecated. The default name has been removed.
- The Geometry classes have been updated and several methods have been set to deprecated. They now use Frames as parent instead of Joint directly: a Geometry is now supported by a BODY.
- Add active collision pair flags in GeomData which define the active collision pairs.
- Unify naming conventions (nframes, njoints, etc).
Fixes
- The UDRF parser can now deal with more complex topologies. It properly handles the stack of geometries for each BODY.
- Improve packaging mainly around the Python part.
1.1.2 - 2016-05-31
Summary
This release is directly accessible as a Debian package. Please see https://github.com/stack-of-tasks/pinocchio/wiki/installation for further details.
New Features
- Added operational frames (that are a Plucker coordinate frame attached to a parent joint inside a kinematic tree). Position and Jacobian of such frames can be computed
- Geometry primitives can now be handled (and added to the Pinocchio GeometryModel) when encountered in an urdf file
- Implemented simple srdf parsing for GeometryData : parse the desactivated collision pairs
- Added Articulated Body Algorithm (ABA), and CCRBA
- When parsing a urdf file, now look in the environment variable ROS_PACKAGE_PATH for directories where to search for meshes. Users can provide hint directories to search in as a priority. Updated python RobotWrapper consequently
- Added forward dynamics with contact algorithm
- Added algorithms working with vectors of configuration or velocity(either on a JointModel or on a Model, iterating through all the kinematic tree)
- One can integrate a configuration at a constant velocity during a unit time
- One can differentiate two configurations (i.e compute the velocity that must be integrated during a unit time to go from first configuration to the other )
- One can interpolate between two configurations
- One cancompute the distance between two configurations ( such as dist = norm ( difference) )
- One can shoot a configuration uniformly sampled between specified limits
- Added Impulse Dynamic Algorithm
- Completed the list of method to access or call Joint’s data or method when joint are stored in a variant.
- Added JointAccessor that is a general joint encapsulating a JointVariant ( abstracting the use of visitors for the user).
API modifications
- Moved limits from joint models to Model as vectors of size nq for position limits and size nv for velocity and effort limits
- The Geometry objects stored in GeometryModel are now splitted in two types : visual and collision
Minor
- Improved documentation of Data, Model, Spatial Classes
- Improved efficiency when executing algorithms
- One can now create Inertia for simple shapes such as cylinders, boxes, ellipsoid
- Rework some unittests to increase to coverage of whole package ( C++ and Python )
Bugs Fixed
- Fixed operator Inertia x constraint in JointSphericalZYX
- Fixed the Dense conversion of joints (models and datas)
- Fixed bugs in JointRevoluteUnaligned and JointPrismaticUnaligned to access the access when visiting a variant containing such joints with boost::fusion
1.1.0 - 2016-02-04
Summary
New Features
- Spatial classes now follow the CRTP Design Pattern, for performance reasons.
- JointModels are now exposed in Python. This feature enables one to load a URDF model with a precise root joint and to create his/her own model.
- Python models can now be created by hand ( ex: buildEmptyModel() + calls to addBody() )
- Added utility tools to check an urdf model ( same as check_urdf but dislpay the Pinocchio model created from urdf parsing)
- Add unaligned prismatic joint
- Add geometry through Flexible Collision Library (hpp-fcl)
- Add dedicated structs to handle geometry. GeometryModel (list of geometry objects and its relation wrt kinematic model) and GeometryData
- When parsing urdf, meshes can be read from collada files and handled in Pinocchio
- Created parser that handles geometry and exposed it in python
- Add algorithms to update the geometry kinematics, to compute the distances for pairs of collision or if they are colliding or not.
- Added algorithms to compute the kinetic energy, the potential energy and exposed it in python
- The complete documentation is in progress
API modifications
- Change name of kinematics algorithms: now forwardKinematics instead of previous geometry, kinematics and dynamics.
Minor
- SimpleHumanoid is now built with joint limits
- Handle floating joints in urdf parsing
- Slight separation between joints and body in Model to avoid confusion
- Internally, Motion and Force classes now use a 6D-vector instead of two 3D-vectors for linear and angular part
Bugs Fixed
- Fixed a bug when trying to merge a link with its parent in case of fixed joint. Now merge only if it has an inertial tag.
- All the algorithms are now set to inline
- Fix compilation errors
Installation
The source of the release are available in the file pinocchio-1.1.0.tar.gz just below along with a binary version for 64-bits Debian architecture of Pinocchio **pinocchio_1.1.0amd64.deb** and its dependencies. For information, those packages will be installed in _/opt/openrobots directory.
1.0.2 - 2015-09-14
Summary
New Features
- The limits in position, velocity and torque for joints Revolute and Prismatic are now parsed from urdf model and accessible
- Implementation of exp and log functions on SE3 in C++ with its python binding thanks to @aelkhour
- Data now contains information relative to the center of mass position, velocity and acceleration
- Add Lua parser - compatible with RBDL
- Add translational joint
- Add planar joint
Minor
- Reduction of compilation warnings.
Bugs Fixed
- Fixed bug in operator Y*S in JointRevoluteUnaligned
1.0.0 - 2015-04-03
The following algorithms are implemented. • Recursive Newton-Euler algorithm (RNEA, i.e inverse dynamics) • Composite Rigid Body algorithm (CRBA, i.e generalized inertia matrix) • Sparse Cholesky decomposition of the inertia matrix (for constrained forward-dynamics resolution) • Placement Jacobians (i.e application from configuration velocities to end-effector spatial velocities), along with computation of body placements, velocities and accelerations. • Center of mass and its Jacobian
The model can either be parsed from a URDF format or be created by appendending bodies. The following joint models are implemented. • Revolute X, Y, Z (optimized) and unaligned with Cartesian directions • Prismatic X, Y, Z • Spherical (with and withoug singularities) • FreeFlyer (i.e. no constraint, for mobile robots like humanoids – using quaternion representation for the rotation) • Fixed (concatenation of two consecutive bodies)