
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library




![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
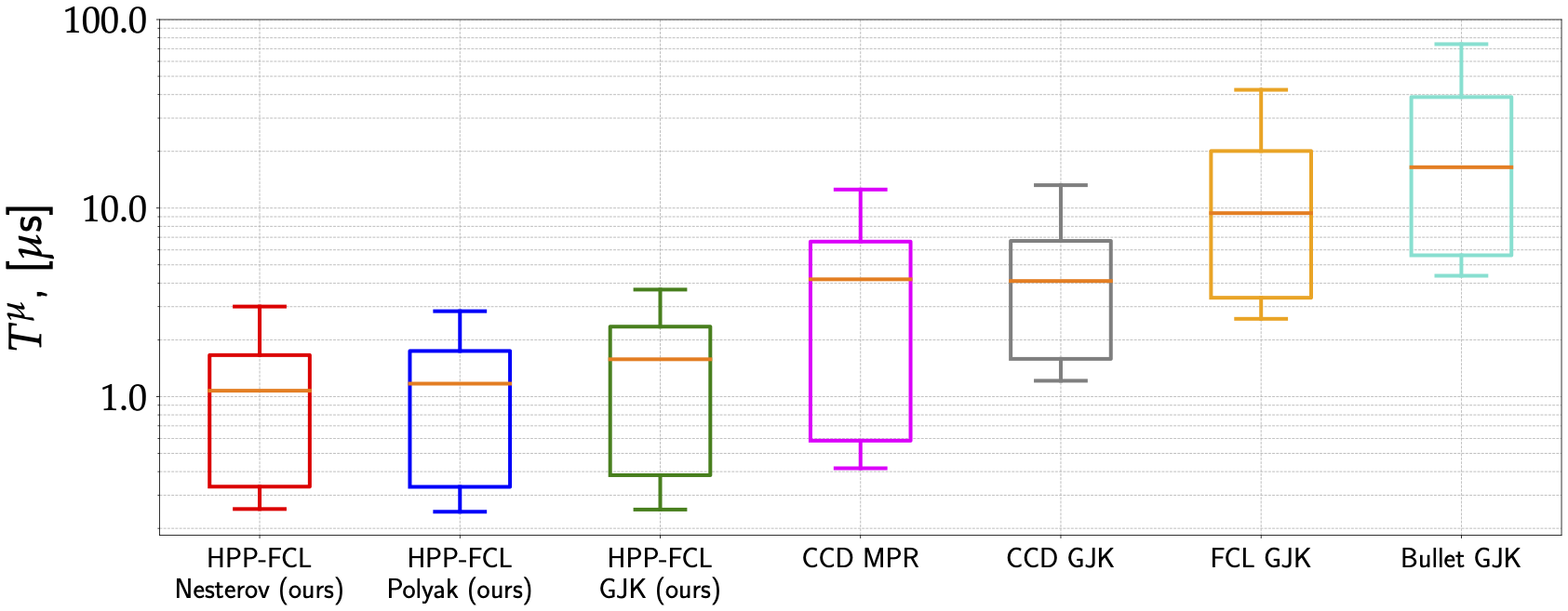
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
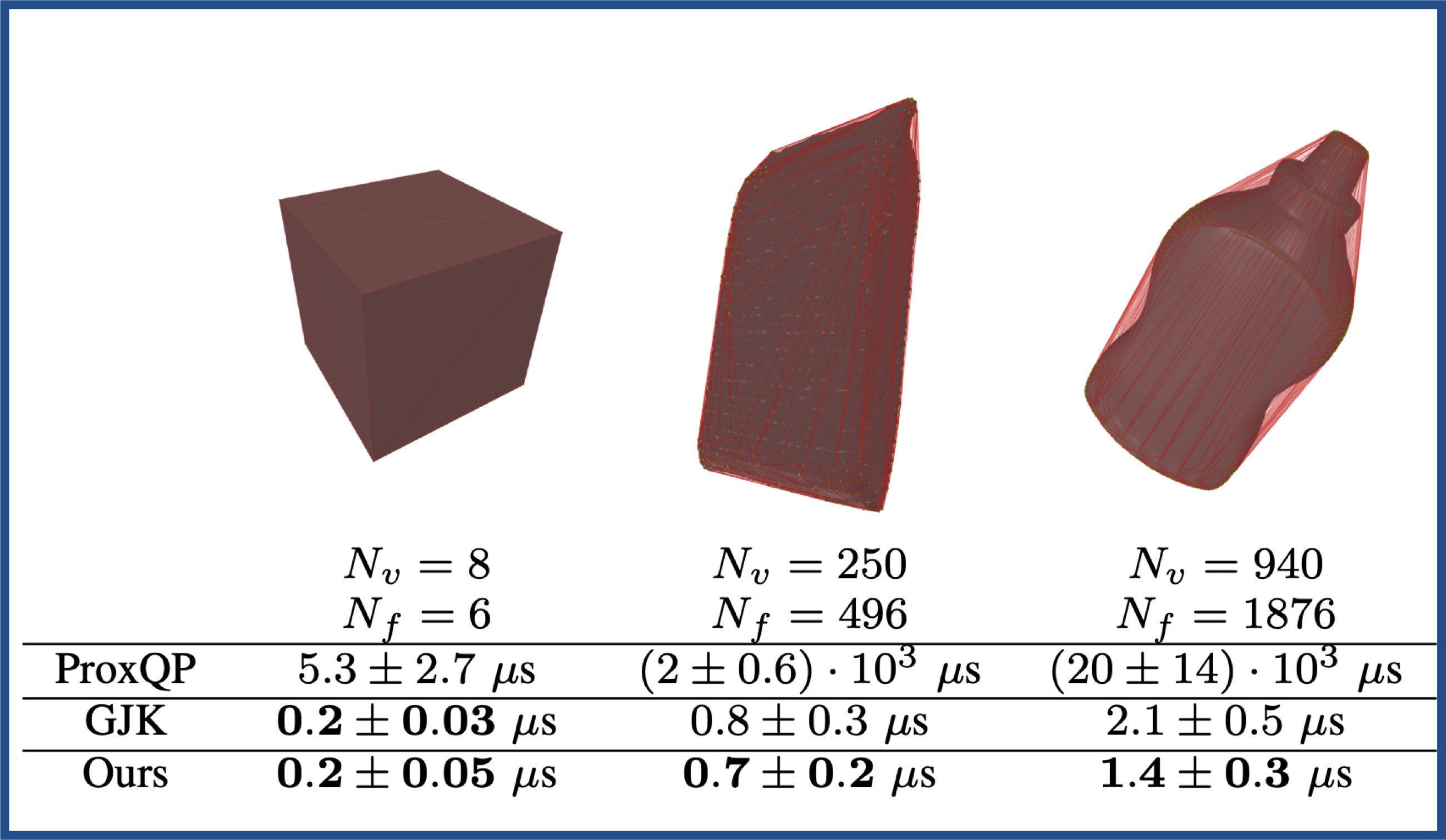
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| coal | 3.0.4 |
README
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file