
|
fake_joint_driver package from fake_joint repofake_joint fake_joint_driver fake_joint_launch |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.4 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tork-a/fake_joint.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-01-26 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Tokyo Opensource Robotics Kyokai (TORK) Developer Team
Authors
- Ryosuke Tajima
fake_joint_driver
This package contains a node to provide
hardware_interface::PositionJointInterface, which simply loopback
the command joint position to the actual position. In other words, it
is faking a perfect joint controller. It can be used from
ros_controllers such as JointTrajectoryController. You can check your
own joint trajectories on rviz, without using Gazebo or others.
Quick start
launch the nodes
On one terminal, do:
$ roslaunch fake_joint_driver fake-joint-driver.test
This launch file does:
- Loading robot description of simple 3-DOF arm in robot/arm3.urdf.xacro
- Launching fake_joint_driver_node and robot_state_publisher
- Launching controller manager to spawn ros_controllers (joint_state_controller and joint_trajecotry_controller)
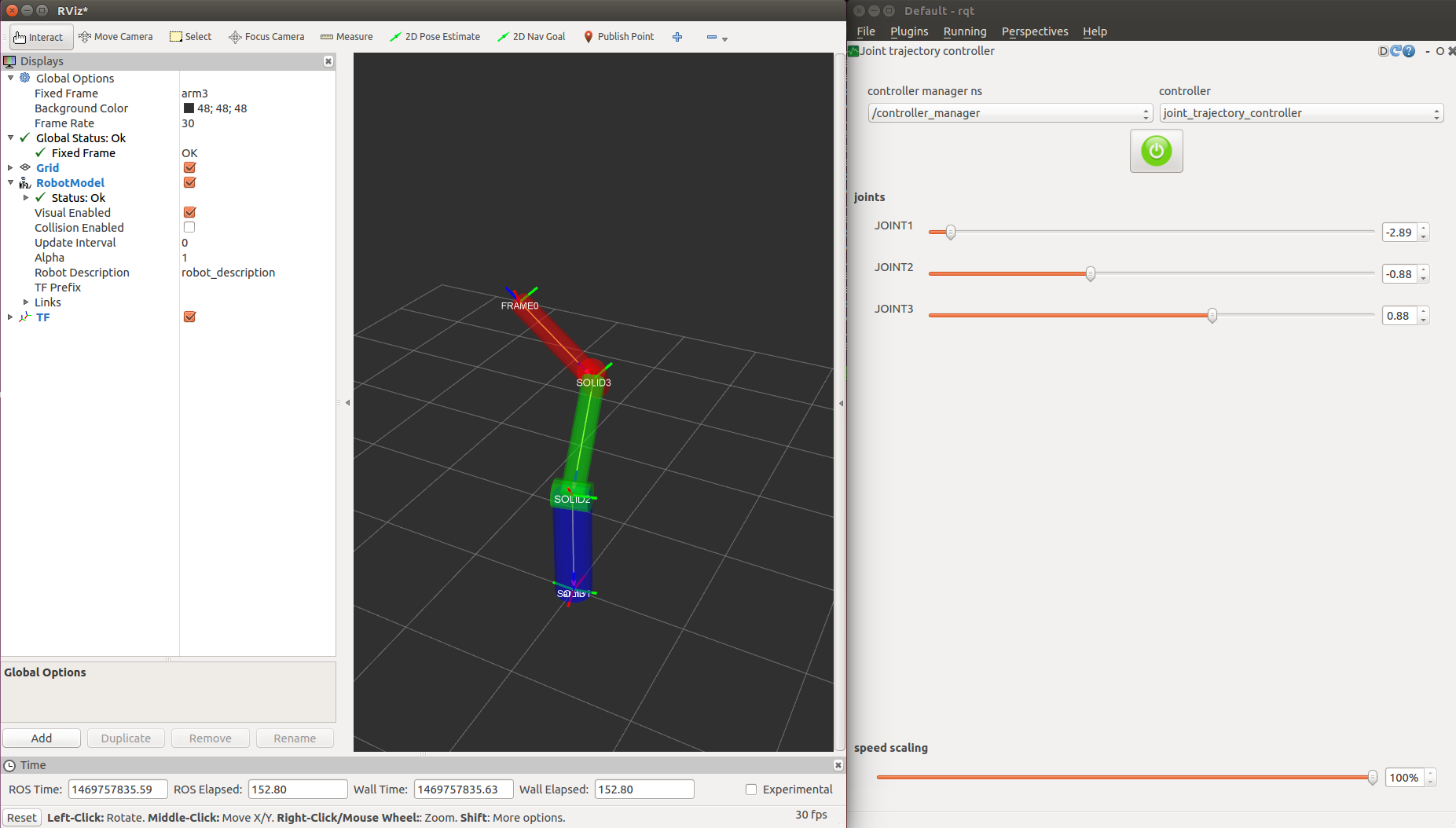
See the robot in rviz
On another terminal, do:
$ rviz
Add robot model to see the robot.
Set trajectory with rqt_joint_trajectory_controller
On another terminal, do:
$ rqt
Choose Plugins->Robot tools->Joint trajectory controller to load the plugin. Select controller manager and controller, then you can see sliders to set the joint trajectory goals.
Parameters
-
main_loop_rateThe internal loop rate at which the robot controls are updated. This rate is a hard limit for joint state publishers. The default value is set to 100 Hz.
-
use_robot_descriptionWhen it is true, the driver read the parameter
/robot_descriptionto obtain the joint list to control by this driver. When it is false, you must specify the joint list byinclude_jointsparameters. -
include_jointsThis is the list of the joints which the driver node should control.
-
exclude_jointsThis is the list of the joints which the driver node should not control.
-
start_positionThis is a map to specify the initial position of the joint. You can use this to avoid collision in zero joint angle.
Use like:
<!-- fake_joint_driver_node -->
<node name="fake_joint_driver" pkg="fake_joint_driver" type="fake_joint_driver_node">
<!-- Set joint start position -->
<rosparam param="start_position">{LARM_JOINT2: -1.7, RARM_JOINT2: -1.7}</rosparam>
</node>
Caution
You can set target joints for joint_trajectory_controller in the config/controllers.yaml. Note somehow you cannot see any controllers and joints in rqt_joint_trajectory_controller if any joints have no joint position limits in URDF file. It is easy to be trapped.
Changelog for package fake_joint_driver
0.0.4 (2019-12-18)
0.0.3 (2018-08-31)
- Add start_position parameter(#3)
- 0.0.2
- Add fake_joint meta-package
- Contributors: Ryosuke Tajima
0.0.1 (2018-08-16)
- Add copyright to source files
- Eliminate xacro warning
- Add README and image
- Add vs060 settings
- Add travis badge
- Add launch and re-organize the package
- Contributors: Ryosuke Tajima
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| robot_state_publisher | |
| joint_state_controller | |
| joint_trajectory_controller | |
| position_controllers | |
| roslint | |
| rostest | |
| controller_manager | |
| hardware_interface | |
| roscpp | |
| roslaunch | |
| urdf | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| fake_joint | |
| fake_joint_launch |
Launch files
Messages
Services
Plugins
Recent questions tagged fake_joint_driver at Robotics Stack Exchange
|
|
fake_joint_driver package from fake_joint repofake_joint fake_joint_driver fake_joint_launch |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.4 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tork-a/fake_joint.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-01-26 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Tokyo Opensource Robotics Kyokai (TORK) Developer Team
Authors
- Ryosuke Tajima
fake_joint_driver
This package contains a node to provide
hardware_interface::PositionJointInterface, which simply loopback
the command joint position to the actual position. In other words, it
is faking a perfect joint controller. It can be used from
ros_controllers such as JointTrajectoryController. You can check your
own joint trajectories on rviz, without using Gazebo or others.
Quick start
launch the nodes
On one terminal, do:
$ roslaunch fake_joint_driver fake-joint-driver.test
This launch file does:
- Loading robot description of simple 3-DOF arm in robot/arm3.urdf.xacro
- Launching fake_joint_driver_node and robot_state_publisher
- Launching controller manager to spawn ros_controllers (joint_state_controller and joint_trajecotry_controller)
See the robot in rviz
On another terminal, do:
$ rviz
Add robot model to see the robot.
Set trajectory with rqt_joint_trajectory_controller
On another terminal, do:
$ rqt
Choose Plugins->Robot tools->Joint trajectory controller to load the plugin. Select controller manager and controller, then you can see sliders to set the joint trajectory goals.
Parameters
-
main_loop_rateThe internal loop rate at which the robot controls are updated. This rate is a hard limit for joint state publishers. The default value is set to 100 Hz.
-
use_robot_descriptionWhen it is true, the driver read the parameter
/robot_descriptionto obtain the joint list to control by this driver. When it is false, you must specify the joint list byinclude_jointsparameters. -
include_jointsThis is the list of the joints which the driver node should control.
-
exclude_jointsThis is the list of the joints which the driver node should not control.
-
start_positionThis is a map to specify the initial position of the joint. You can use this to avoid collision in zero joint angle.
Use like:
<!-- fake_joint_driver_node -->
<node name="fake_joint_driver" pkg="fake_joint_driver" type="fake_joint_driver_node">
<!-- Set joint start position -->
<rosparam param="start_position">{LARM_JOINT2: -1.7, RARM_JOINT2: -1.7}</rosparam>
</node>
Caution
You can set target joints for joint_trajectory_controller in the config/controllers.yaml. Note somehow you cannot see any controllers and joints in rqt_joint_trajectory_controller if any joints have no joint position limits in URDF file. It is easy to be trapped.
Changelog for package fake_joint_driver
0.0.4 (2019-12-18)
0.0.3 (2018-08-31)
- Add start_position parameter(#3)
- 0.0.2
- Add fake_joint meta-package
- Contributors: Ryosuke Tajima
0.0.1 (2018-08-16)
- Add copyright to source files
- Eliminate xacro warning
- Add README and image
- Add vs060 settings
- Add travis badge
- Add launch and re-organize the package
- Contributors: Ryosuke Tajima
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| robot_state_publisher | |
| joint_state_controller | |
| joint_trajectory_controller | |
| position_controllers | |
| roslint | |
| rostest | |
| controller_manager | |
| hardware_interface | |
| roscpp | |
| roslaunch | |
| urdf | |
| xacro |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| fake_joint | |
| fake_joint_launch |